Spatial Learning with Orientation Maps: The Influence of Different Environmental Features on Spatial Knowledge Acquisition


Abstract
1. Introduction
2. Related Works
2.1. Spatial Knowledge Acquisition during Assisted Wayfinding
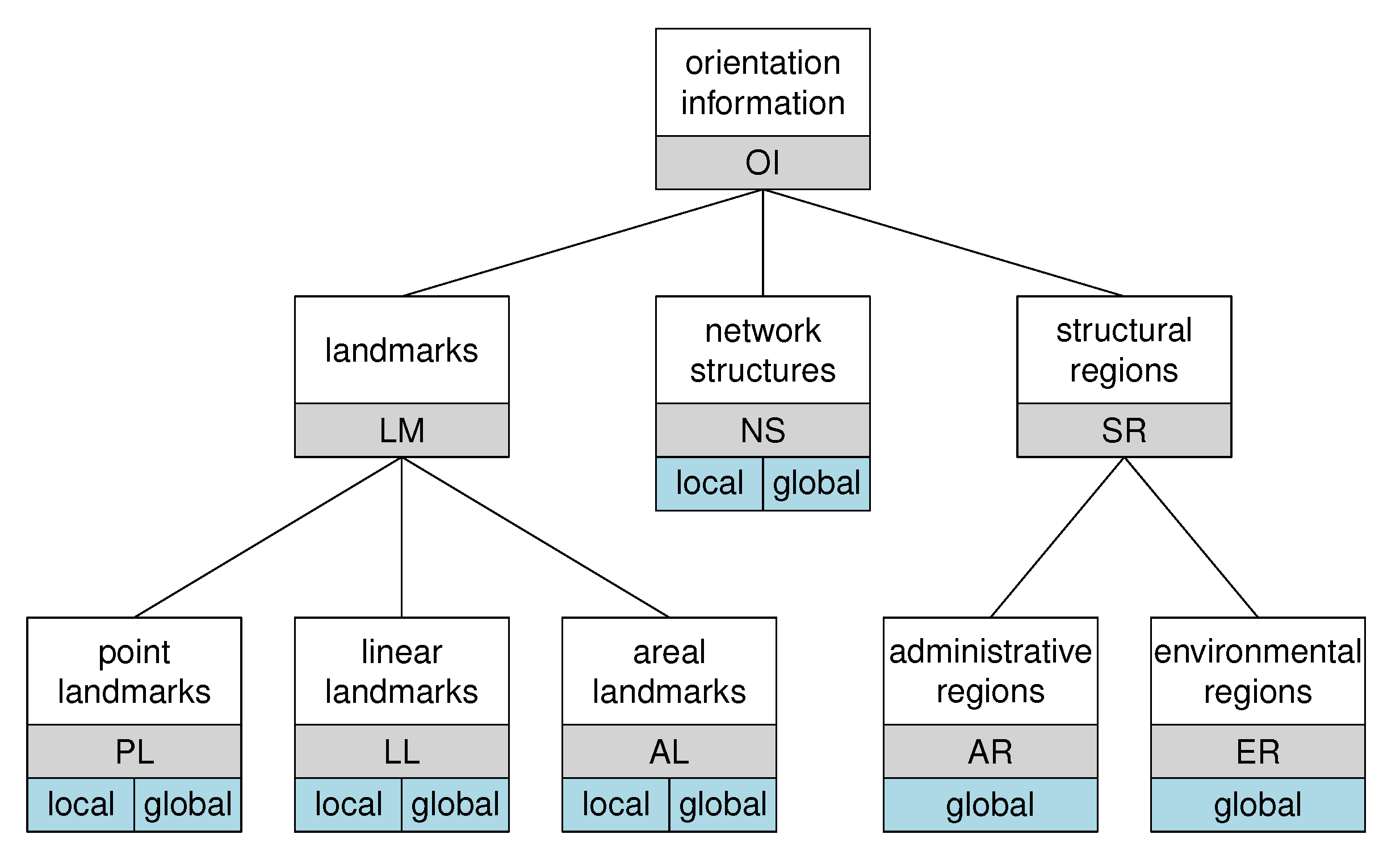
2.2. Landmarks and Orientation Information in Wayfinding Instructions
2.3. Wayfinding Assistance
3. Materials and Methods
3.1. Participants
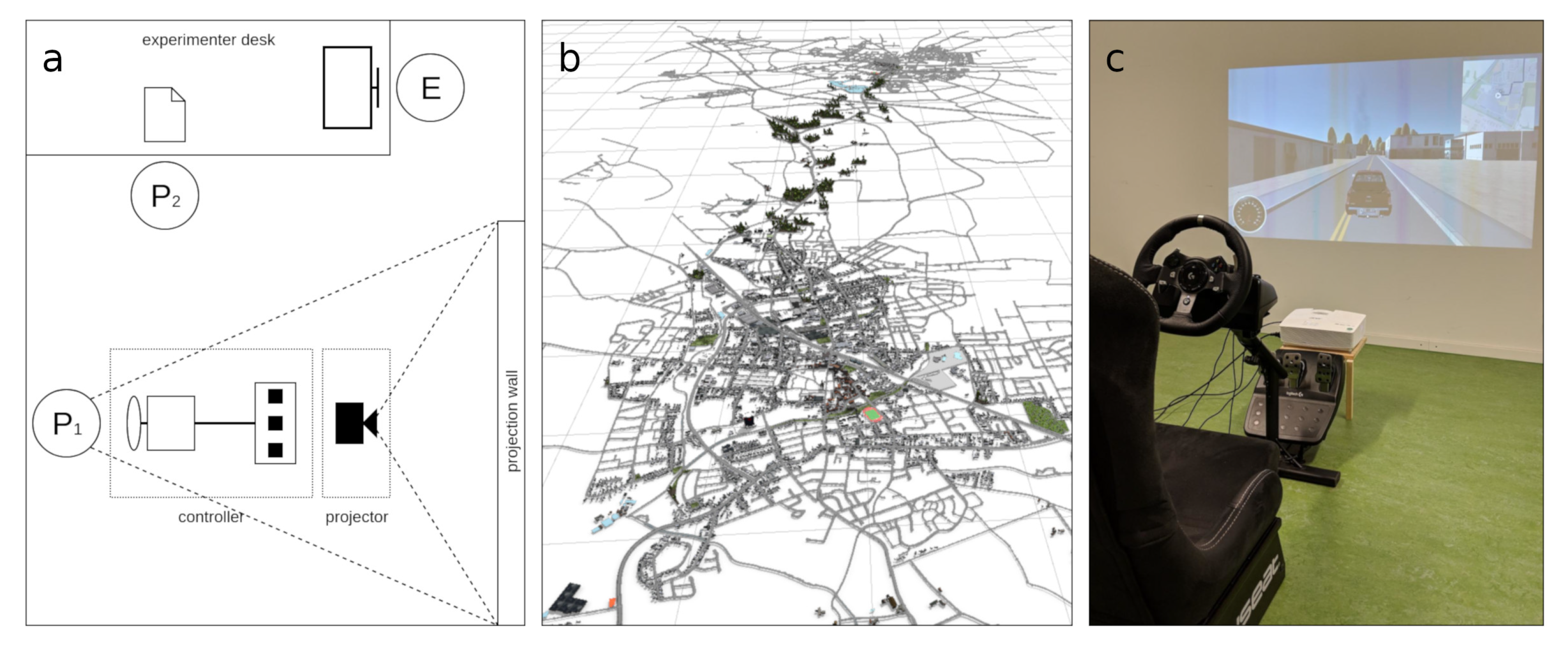
3.2. Materials and Apparatus
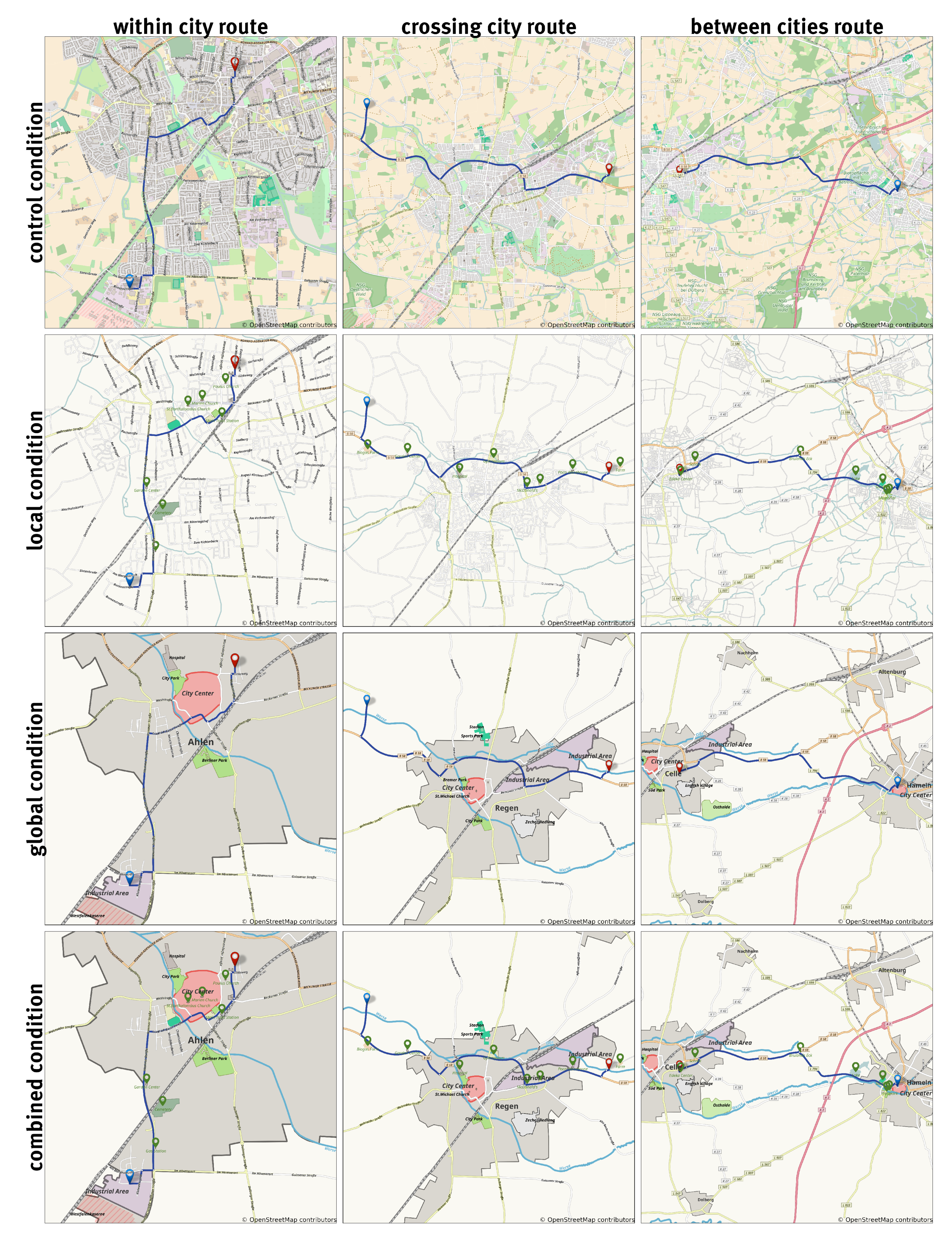
3.3. Experimental Design
3.4. Procedure
3.5. Dependent Measures
4. Results
4.1. Direction Estimation
4.2. Recall of Landmarks and Structures
4.2.1. Landmarks
4.2.2. Structures
4.3. Sketch Map Types
4.3.1. Route-Likeness
4.3.2. Survey-Likeness
4.4. Mental Workload and Wayfinding Performance
5. Discussion
5.1. Spatial Knowledge Acquisition
5.2. Route types and Mental Workload
5.3. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schwering, A.; Krukar, J.; Li, R.; Anacta, V.J.; Fuest, S. Wayfinding Through Orientation. Spat. Cogn. Comput. 2017, 17, 273–303. [Google Scholar] [CrossRef]
- Münzer, S.; Zimmer, H.D.; Baus, J. Navigation assistance: A trade-off between wayfinding support and configural learning support. J. Exp. Psychol. Appl. 2012, 18, 18–37. [Google Scholar] [CrossRef] [PubMed]
- Krüger, A.; Aslan, I.; Zimmer, H. The Effects of Mobile Pedestrian Navigation Systems on the Concurrent Acquisition of Route and Survey Knowledge. In Mobile Human-Computer Interaction-MobileHCI 2004; Brewster, S., Dunlop, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 446–450. [Google Scholar]
- Ishikawa, T.; Fujiwara, H.; Imai, O.; Okabe, A. Wayfinding with a GPS-based mobile navigation system: A comparison with maps and direct experience. J. Environ. Psychol. 2008, 28, 74–82. [Google Scholar] [CrossRef]
- Burnett, G.E.; Lee, K. The Effect of Vehicle Navigation Systems on the Formation of Cognitive Maps. In International Conference of Traffic and Transport Psychology; Underwood, G., Ed.; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Burnett, G. ‘Turn right at the Traffic Lights’: The Requirement for Landmarks in Vehicle Navigation Systems. J. Navig. 2000, 53, 499–510. [Google Scholar] [CrossRef]
- May, A.J.; Ross, T. Presence and Quality of Navigational Landmarks: Effect on Driver Performance and Implications for Design. Hum. Factors J. Hum. Factors Ergon. Soc. 2006, 48, 346–361. [Google Scholar] [CrossRef] [PubMed]
- Gramann, K.; Hoepner, P.; Karrer-Gauss, K. Modified Navigation Instructions for Spatial Navigation Assistance Systems Lead to Incidental Spatial Learning. Front. Psychol. 2017, 8. [Google Scholar] [CrossRef] [PubMed]
- Siegel, A.W.; White, S.H. The Development of Spatial Representations of Large-Scale Environments. In Advances in Child Development and Behavior; Reese, H., Ed.; Academic Press: New York, NY, USA, 1975; Volume 10, pp. 9–55. [Google Scholar]
- Montello, D.R. A new framework for understanding the acquisition of spatial knowledge in large-scale environments. In Spatial and Temporal Reasoning in Geographic Information Systems; Egenhofer, M.J., Golledge, R.G., Eds.; Oxford University Press: New York, NY, USA, 1998; pp. 143–154. [Google Scholar]
- Ishikawa, T.; Montello, D.R. Spatial knowledge acquisition from direct experience in the environment: Individual differences in the development of metric knowledge and the integration of separately learned places. Cogn. Psychol. 2006, 52, 93–129. [Google Scholar] [CrossRef] [PubMed]
- Münzer, S.; Zimmer, H.D.; Schwalm, M.; Baus, J.; Aslan, I. Computer-assisted navigation and the acquisition of route and survey knowledge. J. Environ. Psychol. 2006, 26, 300–308. [Google Scholar] [CrossRef]
- Ishikawa, T.; Takahashi, K. Relationships between Methods for Presenting Information on Navigation Tools and Users’ Wayfinding Behavior. Cartogr. Perspect. 2014, 17–28. [Google Scholar] [CrossRef]
- Dickmann, F. City Maps Versus Map-Based Navigation Systems—An Empirical Approach to Building Mental Representations. Cartogr. J. 2012, 49, 62–69. [Google Scholar] [CrossRef]
- Gartner, G.; Radoczky, V. Schematic vs. Topographic Maps in Pedestrian Navigation: How Much Map Detail is Necessary to Support Wayfinding. In Proceedings of the AAAI Spring Symposium: Reasoning with Mental and External Diagrams: Computational Modeling and Spatial Assistance; The AAAI Press: Menlo Park, CA, USA, 2005; pp. 41–47. [Google Scholar]
- Richardson, A.E.; Montello, D.R.; Hegarty, M. Spatial knowledge acquisition from maps and from navigation in real and virtual environments. Mem. Cogn. 1999, 27, 741–750. [Google Scholar] [CrossRef]
- Richter, K.F.; Winter, S. Landmarks: GIScience for Intelligent Services; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Denis, M. The description of routes: A cognitive approach to the production of spatial discourse. Cahiers de Psychologie Cognitive 1997, 16, 409–458. [Google Scholar]
- Daniel, M.P.; Denis, M. Spatial Descriptions as Navigational Aids: A Cognitive Analysis of Route Directions. Kognitionswissenschaft 1998, 7, 45–52. [Google Scholar] [CrossRef]
- Michon, P.E.; Denis, M. When and Why Are Visual Landmarks Used in Giving Directions? In Spatial Information Theory: Foundations of Geographic Information Science International Conference, COSIT 2001 Morro Bay, CA, USA, September 19–23, 2001 Proceedings; Montello, D.R., Ed.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 292–305. [Google Scholar]
- Winter, S.; Tomko, M.; Elias, B.; Sester, M. Landmark Hierarchies in Context. Environ. Plan. B Plan. Des. 2008, 35, 381–398. [Google Scholar] [CrossRef]
- Tom, A.; Denis, M. Referring to Landmark or Street Information in Route Directions: What Difference Does It Make? In Spatial Information Theory. Foundations of Geographic Information Science: International Conference, COSIT 2003; Kuhn, W., Worboys, M.F., Timpf, S., Eds.; Springer: Berlin/ Heidelberg, Germany, 2003; pp. 362–374. [Google Scholar]
- Anacta, V.J.A.; Schwering, A.; Li, R.; Muenzer, S. Orientation information in wayfinding instructions: Evidences from human verbal and visual instructions. GeoJournal 2017, 82, 567–583. [Google Scholar] [CrossRef]
- Lovelace, K.L.; Hegarty, M.; Montello, D.R. Elements of Good Route Directions in Familiar and Unfamiliar Environments. In Spatial Information Theory. Cognitive and Computational Foundations of Geographic Information Science; Freksa, C., Mark, D.M., Eds.; Springer: Berlin/Heidelberg, Germany, 1999; pp. 65–82. [Google Scholar]
- Steck, S.D.; Mallot, H.A. The Role of Global and Local Landmarks in Virtual Environment Navigation. Presence Teleoperators Virtual Environ. 2000, 9, 69–83. [Google Scholar] [CrossRef]
- Li, R.; Korda, A.; Radtke, M.; Schwering, A. Visualising distant off-screen landmarks on mobile devices to support spatial orientation. J. Locat. Based Serv. 2014, 8, 166–178. [Google Scholar] [CrossRef]
- Krukar, J.; Schwering, A. What is Orientation? In Proceedings of the 13th Biannual Conference of the German Cognitive Science Society; Barkowsky, T., Llansola, Z.F., Schultheis, H., van de Ven, J., Eds.; KogWis: Space for Cognition: Bremen, Germany, 2016; pp. 115–118. [Google Scholar]
- Sorrows, M.E.; Hirtle, S.C. The Nature of Landmarks for Real and Electronic Spaces. In Spatial Information Theory. Cognitive and Computational Foundations of Geographic Information Science: International Conference COSIT’99 Stade, Germany, August 25–29, 1999 Proceedings; Freksa, C., Mark, D.M., Eds.; Springer: Berlin/Heidelberg, Germany, 1999; pp. 37–50. [Google Scholar]
- Raubal, M.; Winter, S. Enriching Wayfinding Instructions with Local Landmarks. In Geographic Information Science: Second International Conference, GIScience 2002; Lecture Notes in Computer Science; Egenhofer, M.J., Mark, D.M., Eds.; Springer: Boulder, CO, USA, 2002; pp. 243–259. [Google Scholar]
- Nothegger, C.; Winter, S.; Raubal, M. Selection of Salient Features for Route Directions. Spat. Cogn. Comput. 2004, 4, 113–136. [Google Scholar] [CrossRef]
- Duckham, M.; Winter, S.; Robinson, M. Including landmarks in routing instructions. J. Locat. Based Serv. 2010, 4, 28–52. [Google Scholar] [CrossRef]
- Caduff, D.; Timpf, S. On the assessment of landmark salience for human navigation. Cogn. Process. 2008, 9, 249–267. [Google Scholar] [CrossRef]
- Löwen, H.; Krukar, J.; Schwering, A. How should Orientation Maps look like? In Proceedings of the 21th AGILE International Conference on Geographic Information Science, Lund, Sweden, 12–15 June 2018. [Google Scholar]
- Golledge, R.G. Human wayfinding and cognitive maps. In Wayfinding Behavior: Cognitive Mapping and Other Spatial Processes; Golledge, R.G., Ed.; The John Hopkins University Press: Baltimore, MD, USA, 1999; Chapter 1; pp. 5–45. [Google Scholar]
- Wiener, J.M.; Büchner, S.J.; Hölscher, C. Taxonomy of Human Wayfinding Tasks: A Knowledge-Based Approach. Spat. Cogn. Comput. 2009, 9, 152–165. [Google Scholar] [CrossRef]
- Richter, K.F.; Klippel, A. A Model for Context-Specific Route Directions. In Spatial Cognition IV. Reasoning, Action, Interaction: International Conference Spatial Cognition 2004, Frauenchiemsee, Germany, October 11–13, 2004, Revised Selected Papers; Freksa, C., Knauff, M., Krieg-Brückner, B., Nebel, B., Barkowsky, T., Eds.; Springer: Frauenchiemsee, Germany, 2005; Volume 3343, pp. 58–78. [Google Scholar]
- Schmid, F.; Richter, K.F.; Peters, D. Route Aware Maps: Multigranular Wayfinding Assistance. Spat. Cogn. Comput. 2010, 10, 184–206. [Google Scholar] [CrossRef]
- Duckham, M.; Kulik, L. “Simplest” Paths: Automated Route Selection for Navigation. In Spatial Information Theory. Foundations of Geographic Information Science: International Conference, COSIT 2003, Kartause Ittingen, Switzerland, September 24–28, 2003. Proceedings; Kuhn, W., Worboys, M.F., Timpf, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 169–185. [Google Scholar]
- Richter, K.F. A Uniform Handling of Different Landmark Types in Route Directions. In Spatial Information Theory; Winter, S., Duckham, M., Kulik, L., Kuipers, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 373–389. [Google Scholar]
- Richter, K.F.; Duckham, M. Simplest Instructions: Finding Easy-to-Describe Routes for Navigation. In Geographic Information Science; Cova, T.J., Miller, H.J., Beard, K., Frank, A.U., Goodchild, M.F., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 274–289. [Google Scholar]
- Smith, B.; Mark, D.M. Ontology and Geographic Kinds. In Proceedings of the 8th International Symposium on Spatial Data Handling (SDH’98), Vancouver, BC, Canada, 11–15 July 1998; pp. 267–282. [Google Scholar]
- Galton, A. On the Ontological Status of Geographic Boundaries. In Foundations of Geographic Information Science; Taylor & Francis: Abingdon, UK, 2003; pp. 160–182. [Google Scholar]
- Münzer, S.; Hölscher, C. Entwicklung und Validierung eines Fragebogens zu räumlichen Strategien. Diagnostica 2011, 57, 111–125. [Google Scholar] [CrossRef]
- Nygren, T.E. Psychometric Properties of Subjective Workload Measurement Techniques: Implications for Their Use in the Assessment of Perceived Mental Workload. Hum. Factors J. Hum. Factors Ergon. Soc. 1991, 33, 17–33. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. In Human Mental Workload; Advances in Psychology; Hancock, P.A., Meshkati, N., Eds.; North-Holland: Amsterdam, The Netherlands, 1988; Volume 52, pp. 139–183. [Google Scholar]
- Krukar, J.; Münzer, S.; Lörch, L.; Anacta, V.J.; Fuest, S.; Schwering, A. Distinguishing Sketch Map Types: A Flexible Feature-Based Classification. In Spatial Cognition XI; Creem-Regehr, S., Schöning, J., Klippel, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 279–292. [Google Scholar]
- Montello, D.R.; Richardson, A.E.; Hegarty, M.; Provenza, M. A Comparison of Methods for Estimating Directions in Egocentric Space. Perception 1999, 28, 981–1000. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Bates, D.; Mächler, M.; Bolker, B.; Walker, S. Fitting Linear Mixed-Effects Models Using lme4. J. Stat. Softw. 2015, 67, 1–48. [Google Scholar] [CrossRef]
- Maguire, E.A.; Woollett, K.; Spiers, H.J. London taxi drivers and bus drivers: A structural MRI and neuropsychological analysis. Hippocampus 2006, 16, 1091–1101. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Condition | Pointing Deviation | Recall Local | Recall Global | Route-Likeness | Survey-Likeness |
|---|---|---|---|---|---|
| Mean (Sd) | Mean% (Sd) | Mean% (Sd) | Mean (Sd) | Mean (Sd) | |
| (1) control | 55.93 (56.74) | 31.65 (21.14) | 10.11 (10.77) | 3.14 (0.77) | 1.11 (1.20) |
| (2) local | 54.26 (52.95) | 54.39 (25.50) | 5.01 (7.03) | 3.51 (0.87) | 0.80 (0.94) |
| (3) global | 47.91 (49.50) | 30.68 (21.20) | 15.56 (11.35) | 3.23 (0.99) | 1.64 (1.62) |
| (4) combined | 54.54 (52.27) | 47.22 (23.82) | 13.88 (12.53) | 3.39 (0.89) | 1.36 (1.53) |
| Fixed Effects | |||||
|---|---|---|---|---|---|
| ACCENT_LOCAL | ACCENT_GLOBAL | ROUTE | FRS_EGO | FRS_SURVEY | |
| Pointing | (1) = 0.01, | (1) = 3.77, | (2) = 0.33, | (1) = 5.06, | (1) = 2.22, |
| Deviation | p = 0.90 | p= 0.05 * | p = 0.85 | p= 0.02 * | p = 0.14 |
| Recall | (1) = 27.23, | (1) = 0.12, | (2) = 3.43, | (1) = 4.24, | (1) = 0.73, |
| Local | p= 1.81 *** | p = 0.73 | p = 0.18 | p= 0.04 * | p = 0.39 |
| Recall | (1) = 1.28, | (1) = 11.57, | (2) = 3.84, | (1) = 0.80, | (1) = 0.57, |
| Global | p = 0.26 | p= 6.69 *** | p = 0.15 | p = 0.37 | p = 0.45 |
| Route- | (1) = 5.87, | (1) = 0.67, | (2) = 3.16, | (1) = 8.98, | (1) = 0.22, |
| Likeness | p= 0.02 * | p = 0.41 | p = 0.21 | p= 2.74 ** | p = 0.64 |
| Survey- | (1) = 0.33, | (1) = 5.81, | (2) = 2.35, | (2) = 1.98, | (2) = 1.98, |
| Likeness | p = 0.56 | p= 0.02 * | p = 0.31 | p = 0.16 | p = 0.45 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Löwen, H.; Krukar, J.; Schwering, A. Spatial Learning with Orientation Maps: The Influence of Different Environmental Features on Spatial Knowledge Acquisition. ISPRS Int. J. Geo-Inf. 2019, 8, 149. https://doi.org/10.3390/ijgi8030149
Löwen H, Krukar J, Schwering A. Spatial Learning with Orientation Maps: The Influence of Different Environmental Features on Spatial Knowledge Acquisition. ISPRS International Journal of Geo-Information. 2019; 8(3):149. https://doi.org/10.3390/ijgi8030149
Chicago/Turabian StyleLöwen, Heinrich, Jakub Krukar, and Angela Schwering. 2019. "Spatial Learning with Orientation Maps: The Influence of Different Environmental Features on Spatial Knowledge Acquisition" ISPRS International Journal of Geo-Information 8, no. 3: 149. https://doi.org/10.3390/ijgi8030149
APA StyleLöwen, H., Krukar, J., & Schwering, A. (2019). Spatial Learning with Orientation Maps: The Influence of Different Environmental Features on Spatial Knowledge Acquisition. ISPRS International Journal of Geo-Information, 8(3), 149. https://doi.org/10.3390/ijgi8030149