Method for 3D City Building Continuous Transformation Based on an Improved LOD Topological Data Structure

Abstract
1. Introduction
2. Continuous LOD Data Structures for 3D Building Models
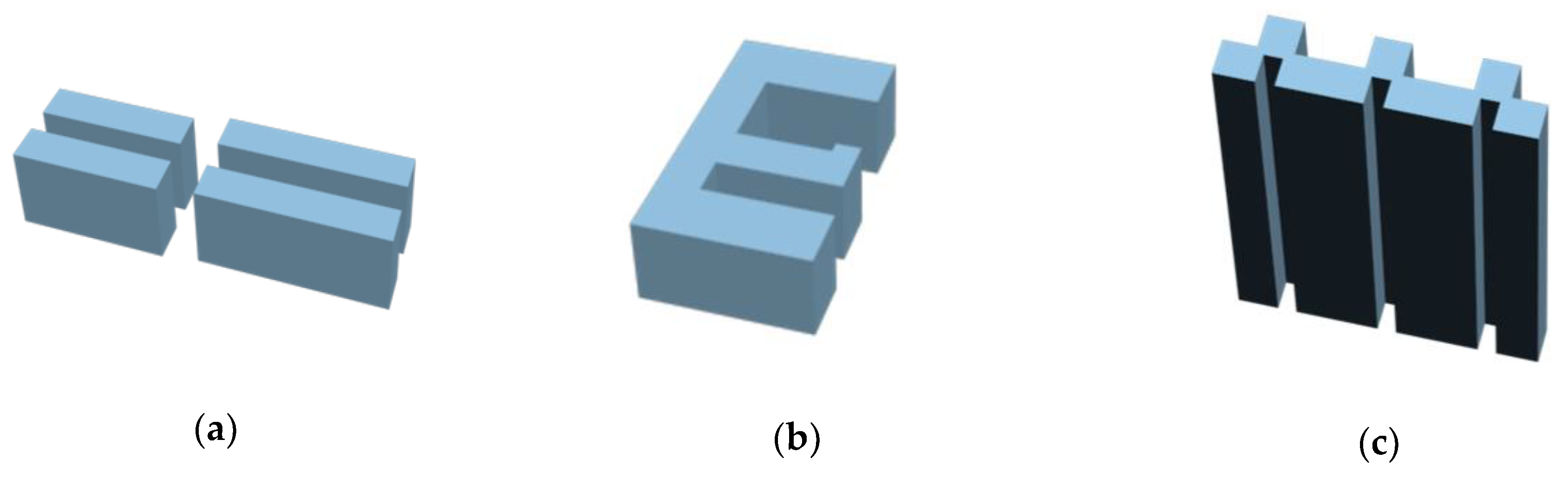
2.1. Essential Features of 3D Building Models
2.2. Representation Method for 3D Building Model
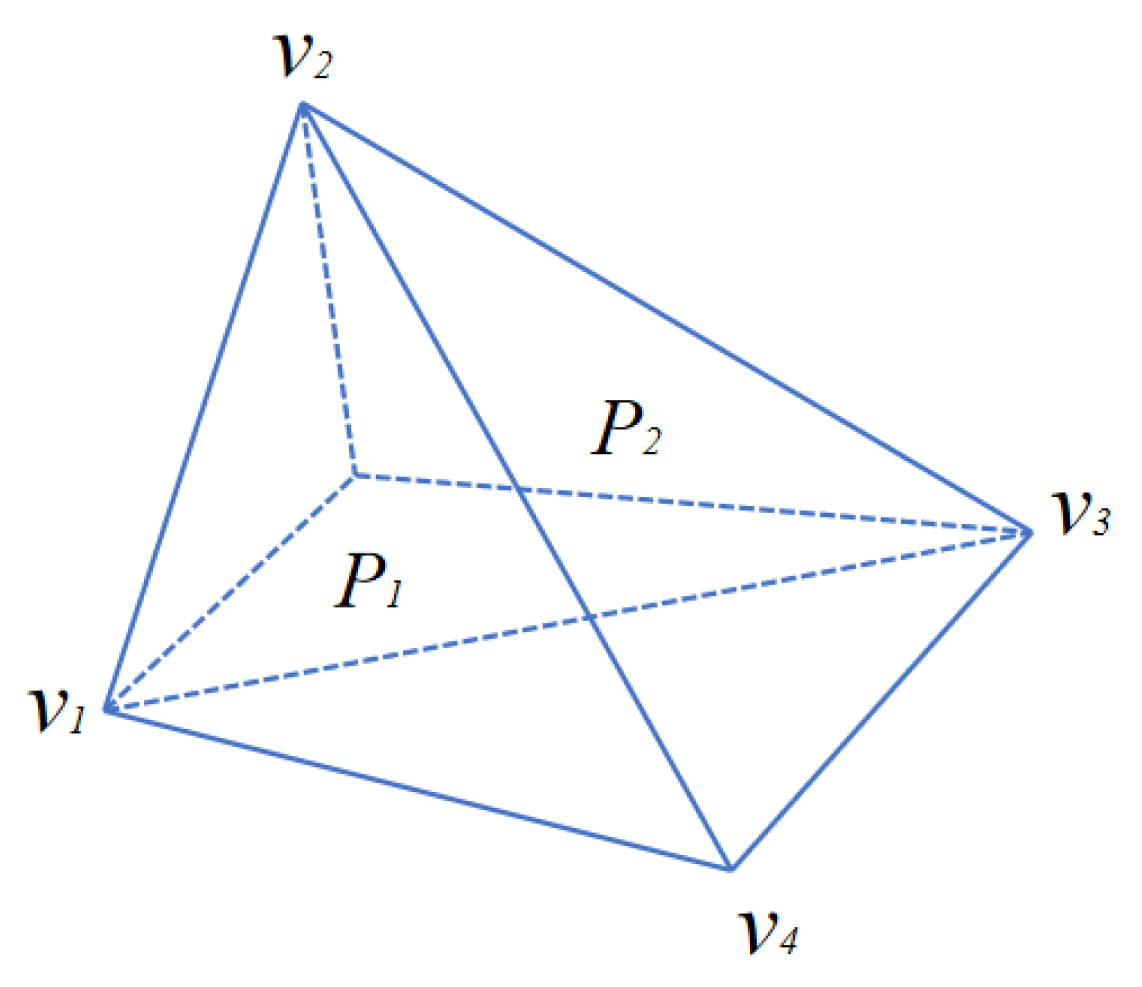
2.2.1. Representation of Triangular Mesh
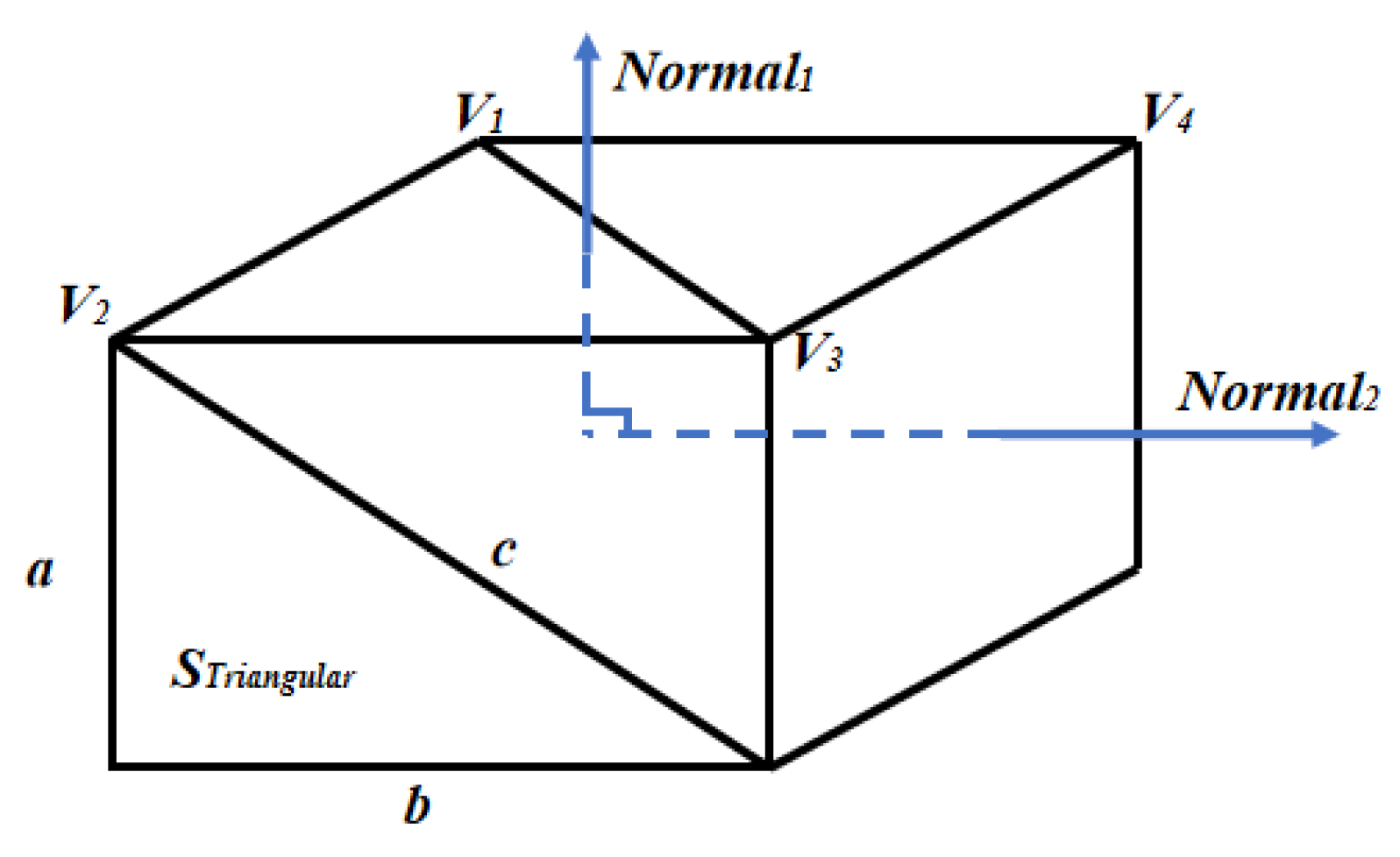
2.2.2. Orientation of Triangular Mesh
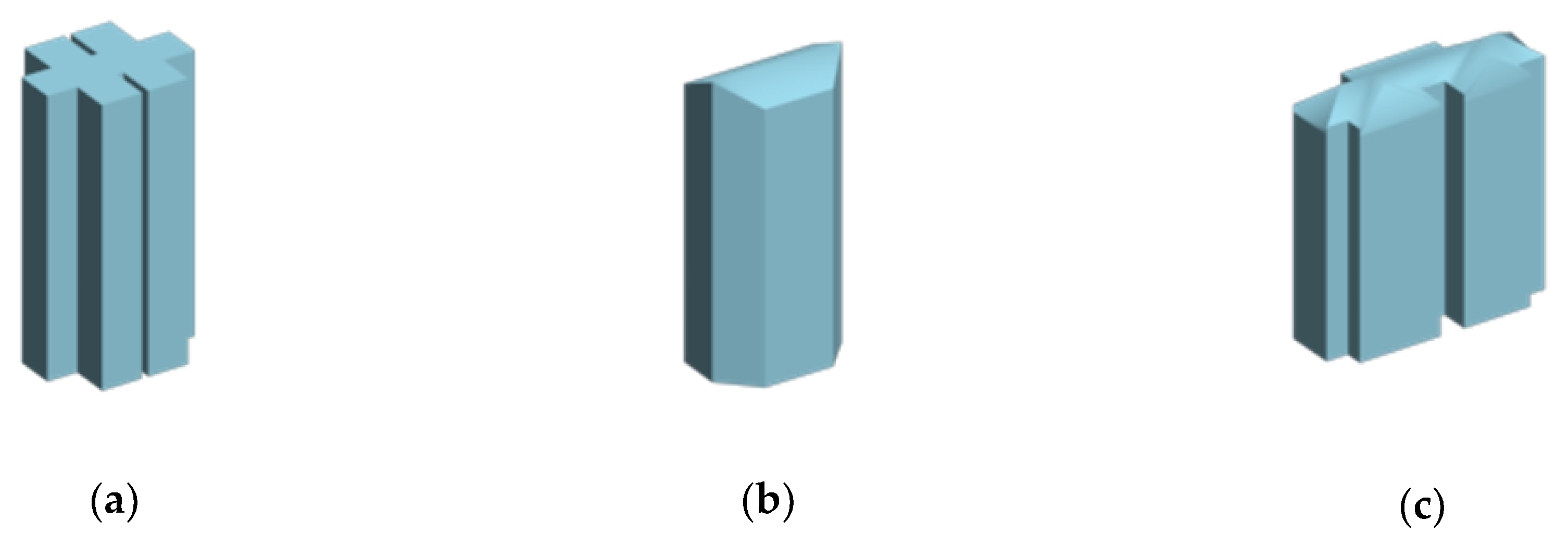
2.3. Detail Transformation of 3D Building Model
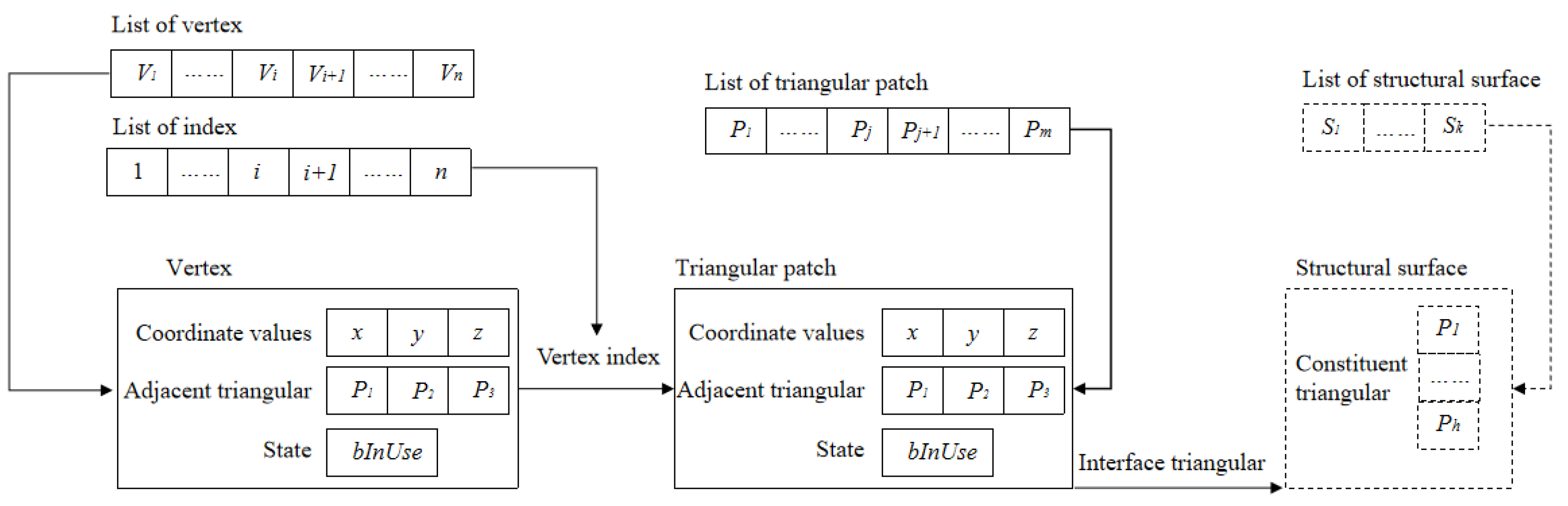
2.4. The Continuous LOD Topological Data Structure of A 3D Building Model
- The coordinate value of the prehidden vertex N(vj), and the index of the prehidden vertex;
- Triangular patch pe, pf that is connected to the prehidden vertex, and the indexes of the two triangular patches N(pe) and N(pf);
- The indexes (N(pa), N(pb), N(pc)……) of the noncharacteristic surface, which need to be updated.
3. Continuous LOD Transformation Method for 3D Building Models
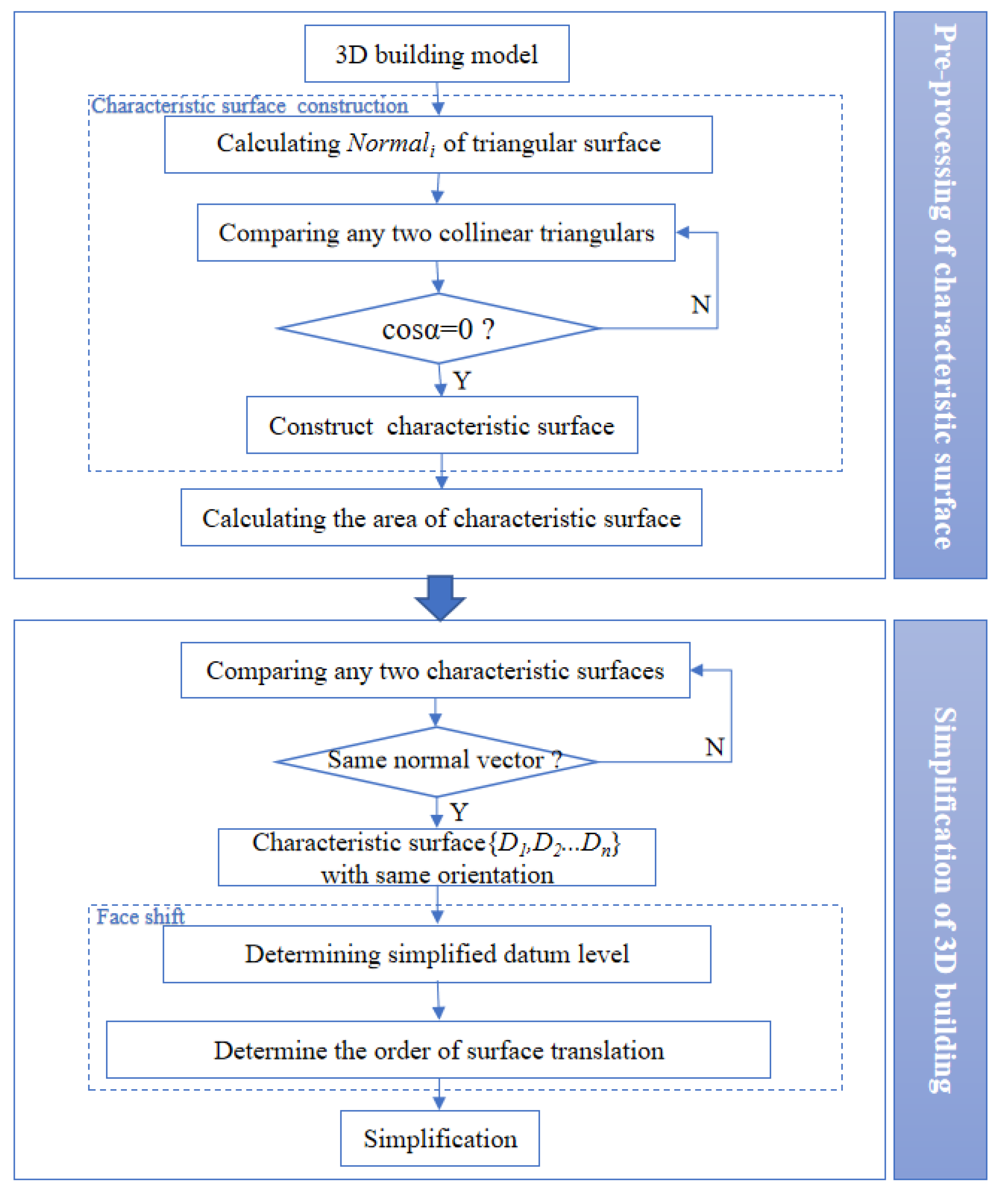
3.1. Pretreatment of Characteristic Surface
- Calculating normal vectors:
- Determining coplanar triangles:If cosα = 0, then the two triangles are coplanar.
- Calculating the area of each characteristic surface to determine the moving direction (the total area of the coplanar triangle):
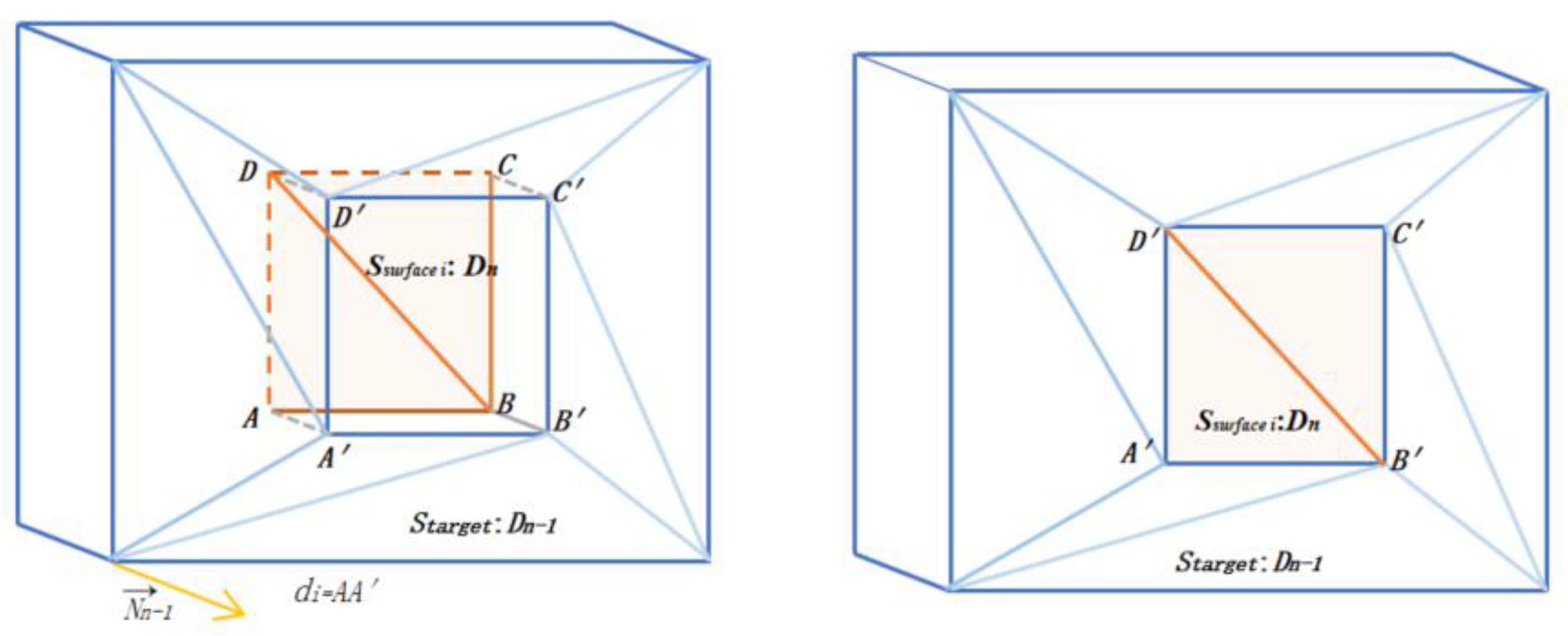
3.2. Simplification of the 3D Building Model
- Confirm the datum level Starget where S▲max is located.
- Calculate the distance di from the center point of Ssurfacei to the datum level, and sort the planes (D1 < D2 < ……Dn) according to the distance, from small to large.
- For each simplification step, only the outermost plane Dn is simplified to the sub-outermost layer Dn−1.
- Until simplified to Starget.
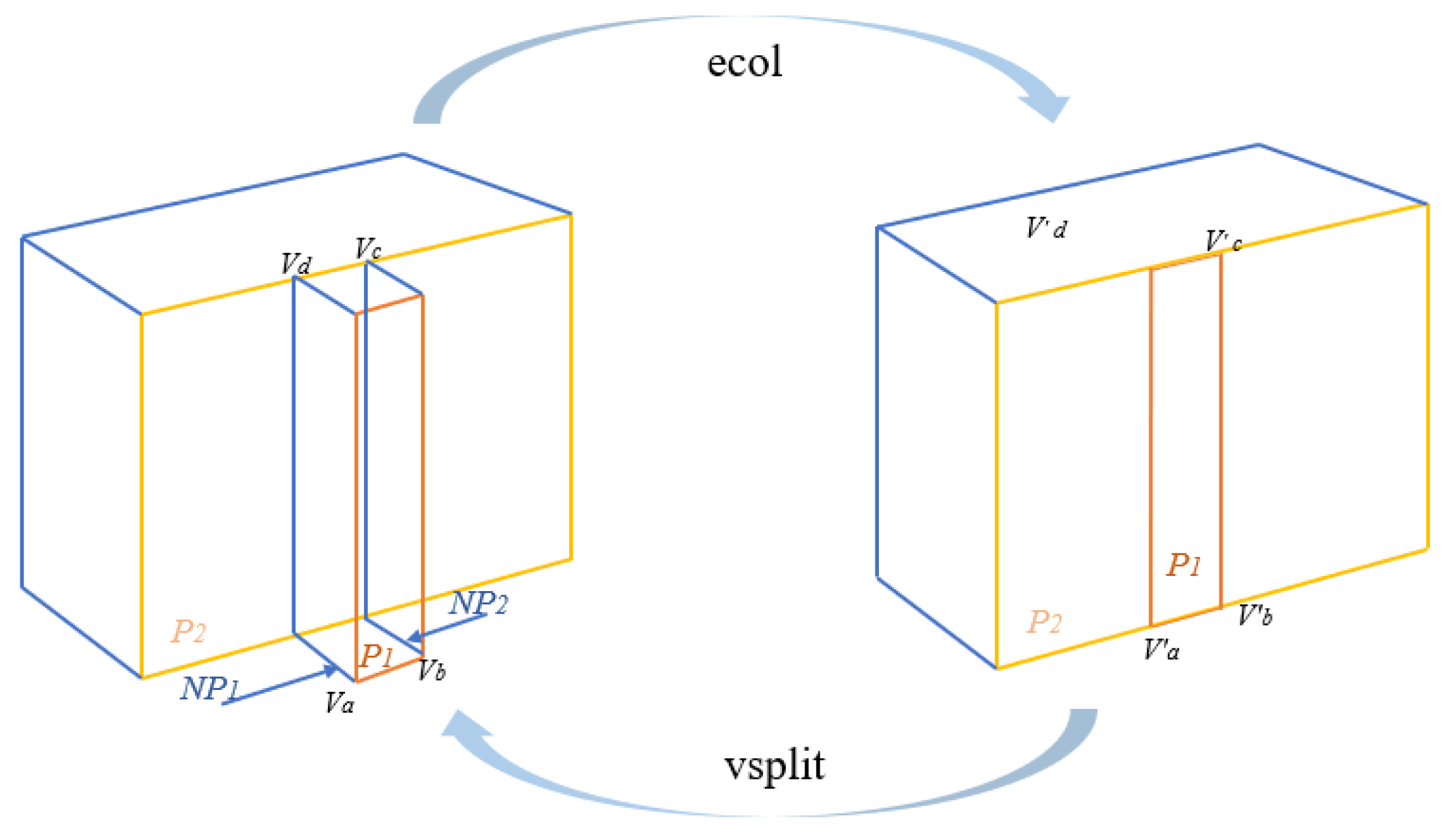
- Set point stack STV and side stack STE to store newly generated points and edges, respectively.
- New vertices A′, B′, C′, and D′ have their coordinate values set to be the projected values that vertices A, B, C, and D project along normal vector to Surface Dn−1.
- New edges A′B′, A′D′, B′C′, and D′C′, and set the default state of bInUse = N.
- Update the use stage of surface Dn by replacing edges AB, AD, BC, and DC (setting edges AB, AD, BC, and DC as the nonuse state and A′B′, A′D′, B′C′, and D′C′ as the use state); then, the surface Dn is simplified to surface Dn−1.
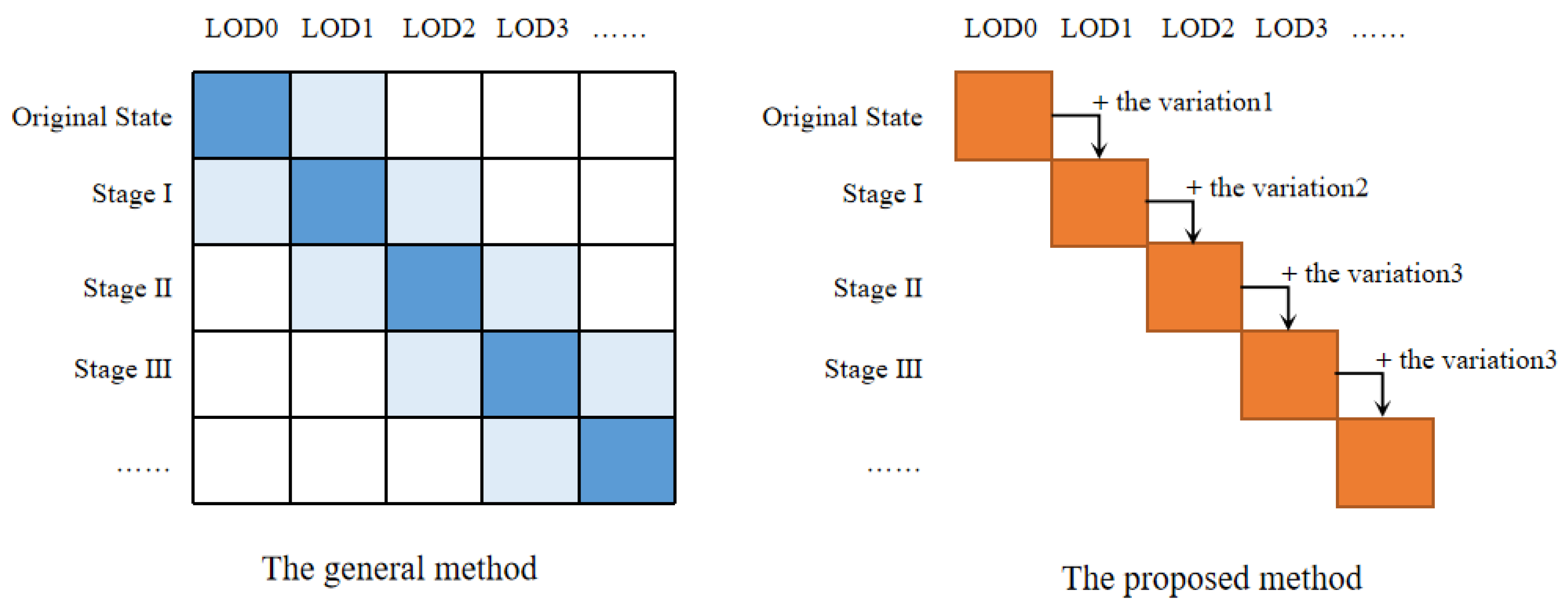
3.3. General Transformation Method Compared with Improved Data Structure Transformation Method
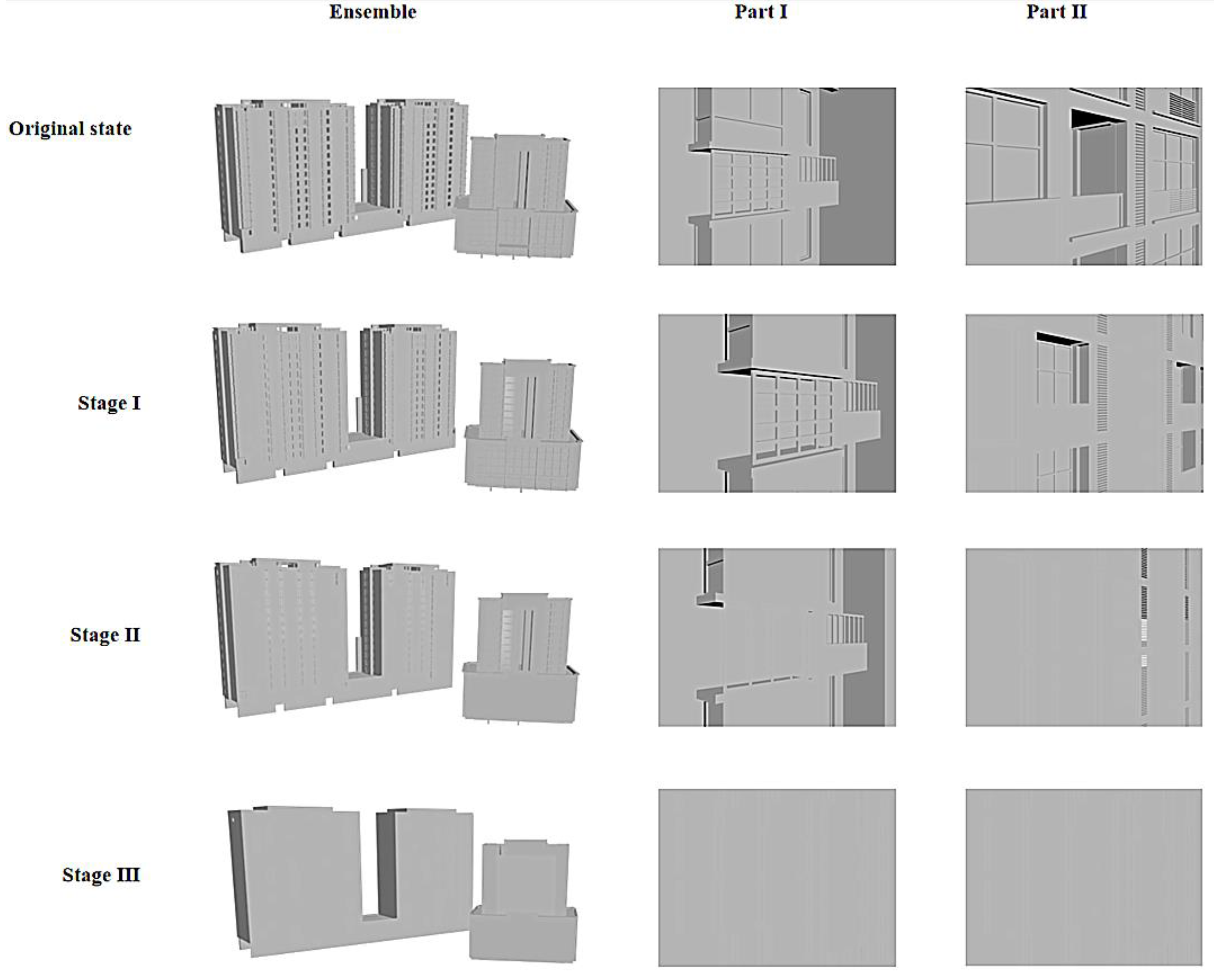
4. Experiments and Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, J.; Li, C.; Xiong, Z.; Shan, Z. Survey of Data-Centric Smart City. J. Comput. Res. Dev. 2014, 51, 239–259. [Google Scholar]
- Deren, L.; Yuan, Y.; Shao, Z. Big Data in Smart City. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 631–640. [Google Scholar]
- Zhu, Q.; Lin, H. Digital City Geographic Information System: A Preliminary Study of Three-Dimensional Urban. Model. In Virtual City Environment; Wuhan University Press: Wuhan, China, 2004. [Google Scholar]
- Zhou, Y.; Zhu, Q.; Huang, Z. LOD of complex buildings for 3DCM. Sci. Surv. Mapp. 2006, 31, 74–77. [Google Scholar]
- Tan, R.; Li, C.; Wang, H. Establishment and application in noise analysis of 3DCM. Sci. Surv. Mapp. 2006, 31, 8–104. [Google Scholar]
- Li, M. Application of 3D Model of Real scene used in Urban Planning and Management. Geomat. Spat. Inf. Technol. 2018, 41, 126–131. [Google Scholar]
- Xiang, Z.; Zhang, C. Study on the Monomer of 3D Modeling of Oblique Photography and the Application of Smart City. Geomat. Spat. Inf. Technol. 2018, 41, 191–201. [Google Scholar]
- Ren, C.; Huo, W.; Zhang, Q. Exploration of the New Smart City Spatial Temporal Information Infrastructure Based on Panoramic Photorealistic 3D Image Technology. Geomat. World 2017, 24, 8–13. [Google Scholar]
- Xue, F.; Huang, M.; Tang, B. Simulation and analysis of urban storm waterlogging based on 3D GIS. Sci. Surv. Mapp. 2017, 42, 53–58. [Google Scholar]
- Xie, J.; Zhang, L.; Li, J.; Wang, H.; Yang, L. Automatic simplification and visualization of 3D urban building models. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 222–231. [Google Scholar] [CrossRef]
- Clark, J.H. Hierarchical geometric models for visible-surface algorithms. ACM SIGGRAPH Comput. Graph. 1976, 19, 547–554. [Google Scholar] [CrossRef]
- Zhu, Q.; Gong, J.; Du, Z.Q.; Zhang, Y.T. LODs Description of 3D City Model. Geomat. Inf. Sci. Wuhan Univ. 2005, 30, 965–969. [Google Scholar]
- Low, K.L.; Tan, T.S. Model simplification using ertex-clustering. In Proceedings of the 1997 Symposium on Interactive 3D Graphics, Providence, RI, USA, 27–30 April 1997; pp. 75–82. [Google Scholar]
- Gong, J.; Zhang, H. A method for LOD generation of 3D city model based on extended 3D R-tree index. In Proceedings of the Eighth International Conference on Fuzzy Systems & Knowledge Discovery, Shanghai, China, 26–28 July 2011. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. An improved LOD specification for 3D building models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef]
- Rau, J.Y.; Chen, L.C.; Tsai, F.; Hsiao, K.H.; Hsu, W.C. LOD Generation for 3D Polyhedral Building Model. In Proceedings of the Pacific Rim Conference on Advances in Image & Video Technology, PSIVT, Hsinchu, Taiwan, 10–13 December 2006. [Google Scholar]
- Ng, K.W.; Low, Z.W. Simplification of 3D Triangular Mesh for Level of Detail Computation. In Proceedings of the 2014 11th International Conference on Computer Graphics, Imaging and Visualization (CGIV), Singapore, 6–8 August 2014. [Google Scholar]
- Yiqin, L.; Mao, P.; Xukun, Y. Implementation of Algorithms for Triangle Meshes Simplification for Huge 3D Geoscience Models. Acta Sci. Nat. Univ. Pekin. 2013, 196, 1023–1031. [Google Scholar]
- Barsanti, S.G.; Guidi, G. A Geometric Processing Workflow for Transforming Reality-Based 3d Models in Volumetric Meshes Suitable for Fea. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 331–338. [Google Scholar] [CrossRef]
- Zhang, X.; Bao, G.; Meng, W.; Jaeger, M.; Li, H.; Deussen, O.; Chen, B. Tree Branch Level of Detail Models for Forest Navigation[J]. Computer Graphics Forum 2017, 36, 402–417. [Google Scholar] [CrossRef]
- Fang, Z.Q.; Hu, G.M.; Du, J.; Jian, B.; Xia, R. A method for representing structural boundaries by mathematical equations and triangle meshes in DEM simulations. Int. J. Numer. Methods Eng. 2017, 111, 218–246. [Google Scholar] [CrossRef]
- Forberg, A. Generalization of 3D building data based on a scale-space approach. ISPRS J. Photogramm. Remote Sens. 2007, 62, 104–111. [Google Scholar] [CrossRef]
- Baig, S.U.; Rahman, A.A. A three-step strategy for generalization of 3D building models based on CityGML specifications. Geojournal 2013, 78, 1013–1020. [Google Scholar] [CrossRef]
- Ge, L.; Wu, F.; Li, J.; Ma, Z. A feature analysis approach in simplification of 3D building with complex flat roof. Acta Sci. Nat. Univ. Pekin. 2017, 53, 1–7. [Google Scholar]
- Li, Y.; Hu, Q.; Wu, M.; Liu, J.; Wu, X. Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services. ISPRS Int. J. Geo Inf. 2016, 5, 231. [Google Scholar] [CrossRef]
- Fan, H.; Meng, L. A three-step approach of simplifying 3D buildings modeled by CityGML. Int. J. Geogr. Inf. Sci. 2012, 26, 1091–1107. [Google Scholar] [CrossRef]
- Xie, J.; Feng, C.C. An Integrated Simplification Approach for 3D Buildings with Sloped and Flat Roofs. ISPRS Int. J. Geo Inf. 2016, 5, 128. [Google Scholar] [CrossRef]
- Giegl, M.; Wimmer, M. Unpopping: Solving the Image-Space Blend Problem for Smooth Discrete LOD Transitions; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Biljecki, F.; Zhao, J.; Stoter, J.; Ledoux, H. Revisiting the Concept of Level of Detail in 3d City Modelling. Remote Sens. Spat. Inf. Sci. 2013, 63–74. [Google Scholar] [CrossRef]
- Ge, L. Study on Simplification Arithmetic of 3D Building. Master’s Thesis, PLA Information Engineering University, Zhengzhou, China, 2007. [Google Scholar]
- Hearn, D.D. Computer Graphics with OpenGL; Publishing House of Electronics Industry: Beijing, China, 2004. [Google Scholar]
- Ge, L.; Wu, F.; Qian, H.; Wang, Z. Facet Shift Algorithm Based on Minimal Feature in Simplification of Parallel Building. J. Geomat. Sci. Technol. 2009, 26, 103–105. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Original State | Stage I | Stage II | Stage III | |
|---|---|---|---|---|
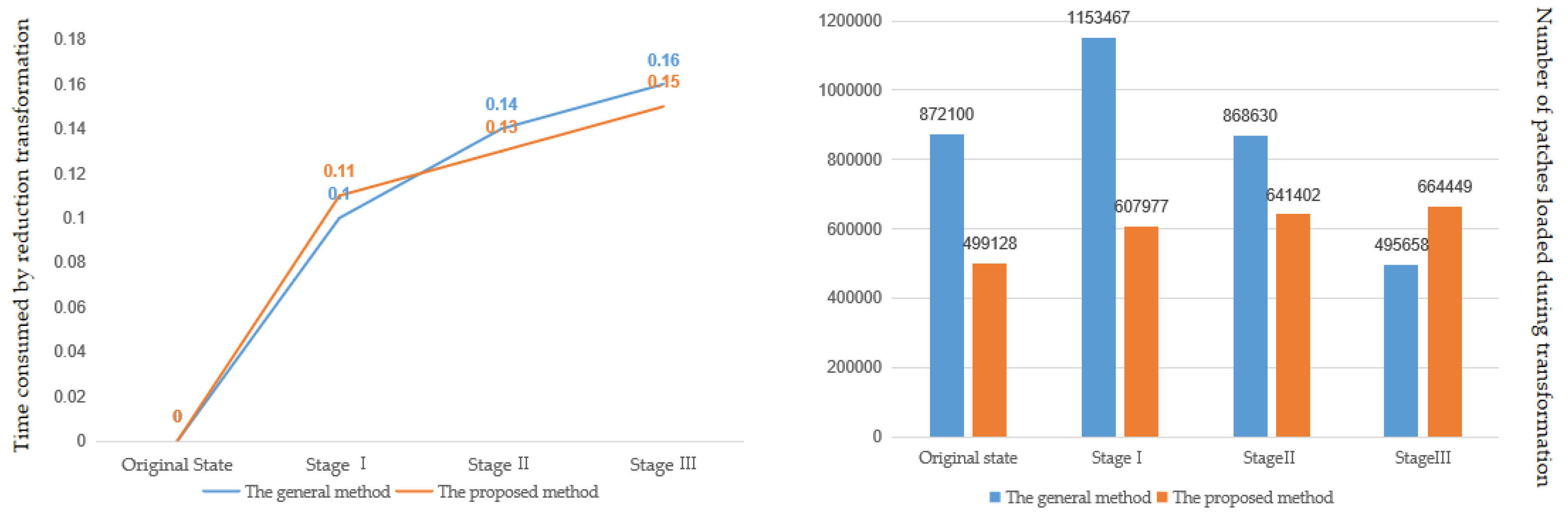
| Total number of patches stored in the list of patches | 499,128 | 607,977 | 641,402 | 664,449 |
| Time taken for the simplification process from the original model to stage i (i = 1, 2, 3) (without rendering time) | 0.51 | 0.59 | 0.64 | |
| Time taken for the reduction process from stage i (i = 1, 2, 3) to the original model (without rendering time) | 0.11 | 0.13 | 0.15 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Li, W.; Lin, Z.; Yi, S. Method for 3D City Building Continuous Transformation Based on an Improved LOD Topological Data Structure. ISPRS Int. J. Geo-Inf. 2019, 8, 504. https://doi.org/10.3390/ijgi8110504
Li S, Li W, Lin Z, Yi S. Method for 3D City Building Continuous Transformation Based on an Improved LOD Topological Data Structure. ISPRS International Journal of Geo-Information. 2019; 8(11):504. https://doi.org/10.3390/ijgi8110504
Chicago/Turabian StyleLi, Siyi, Wenjing Li, Zhiyong Lin, and Shengjie Yi. 2019. "Method for 3D City Building Continuous Transformation Based on an Improved LOD Topological Data Structure" ISPRS International Journal of Geo-Information 8, no. 11: 504. https://doi.org/10.3390/ijgi8110504
APA StyleLi, S., Li, W., Lin, Z., & Yi, S. (2019). Method for 3D City Building Continuous Transformation Based on an Improved LOD Topological Data Structure. ISPRS International Journal of Geo-Information, 8(11), 504. https://doi.org/10.3390/ijgi8110504