Agent-Based Modeling of Taxi Behavior Simulation with Probe Vehicle Data


Abstract
1. Introduction
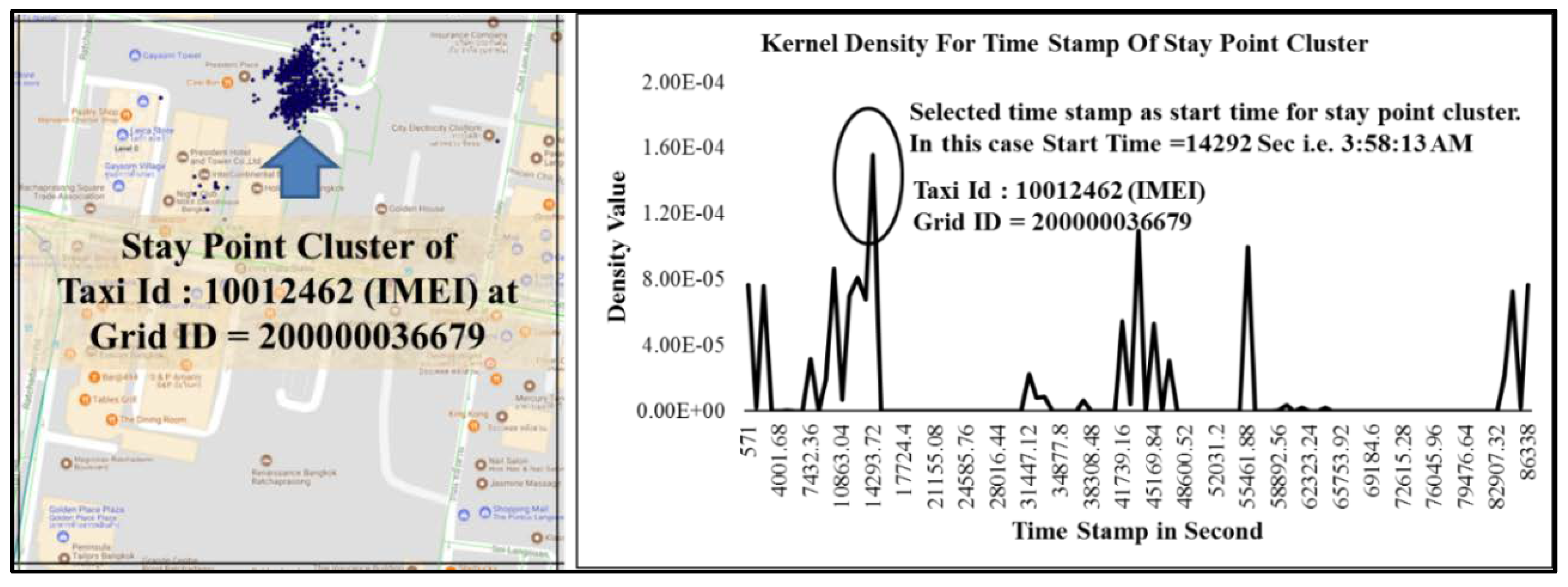
- Proposed a taxi agent regarding spatial and temporal domain based on a stay point cluster of probe GPS data and a kernel density of its timestamp.
- Formulated a concept of free taxi movement based on the movement direction of the taxi, which was introduced for searching passengers.
- Developed an agent-based simulation model which is based on multiple parameters (taxi stay point cluster; trip information (origin and destination); taxi demand information; free taxi movement and network travel time) that were derived from probe GPS taxi data. As such, agent’s parameters were mapped into a grid network and the road network, for which the grid network was used as a base for query/search/retrieval of taxi agent’s parameters, while the actual movement of taxi agents was on the road network, with routing and interpolation.
2. Literature Review
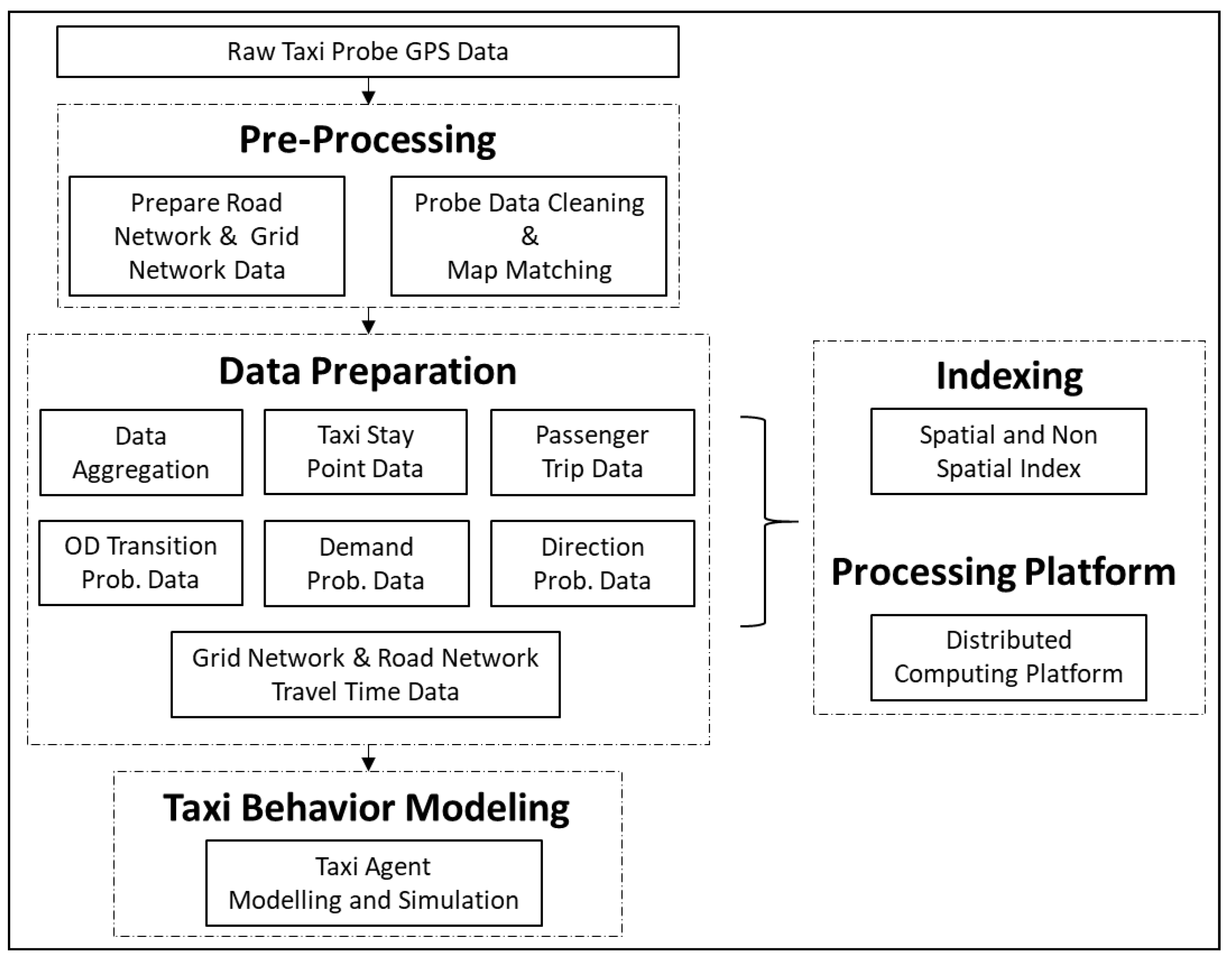
3. System Overview and Preprocessing
3.1. Vehicle Probe Data
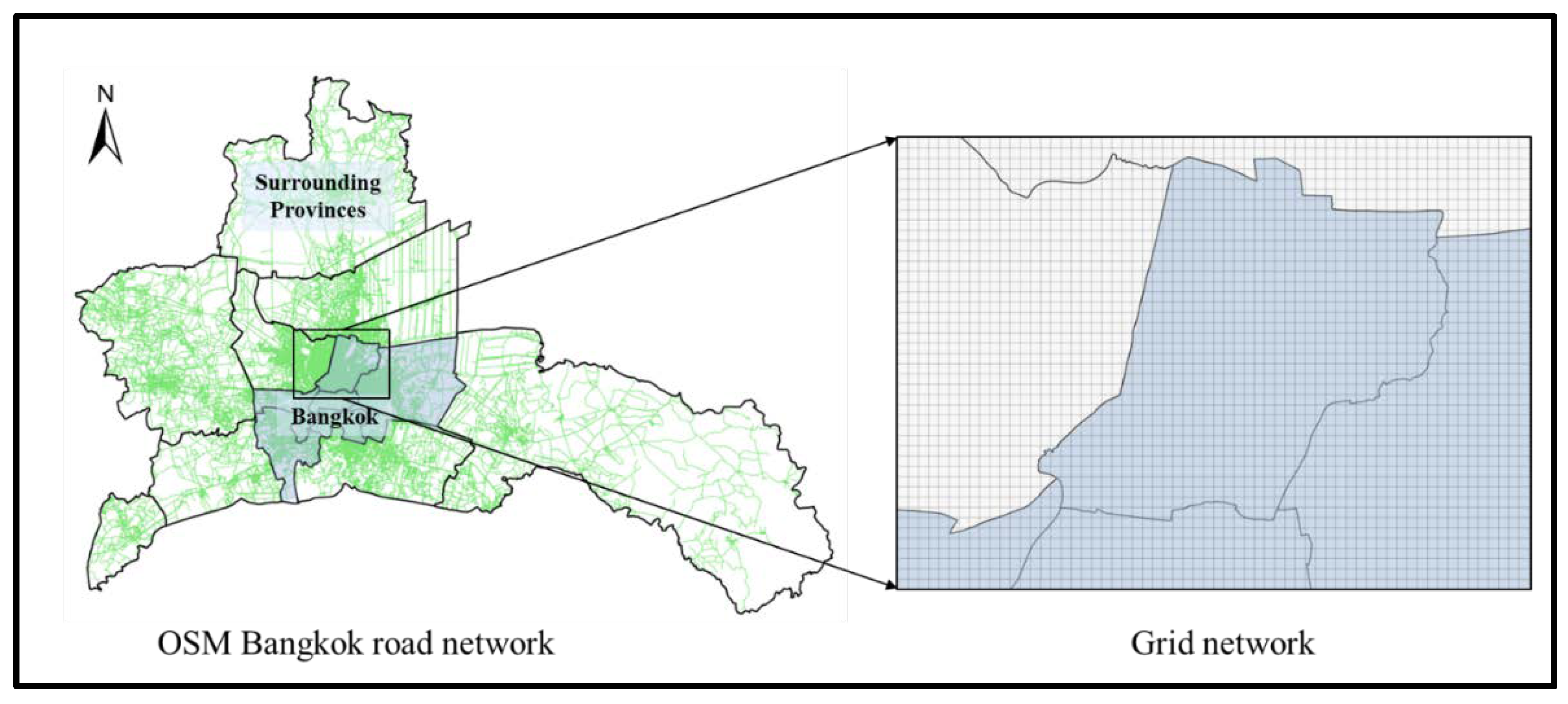
3.2. Prepare Road Network and Grid Network
4. Data Preparation
4.1. Data Aggregation
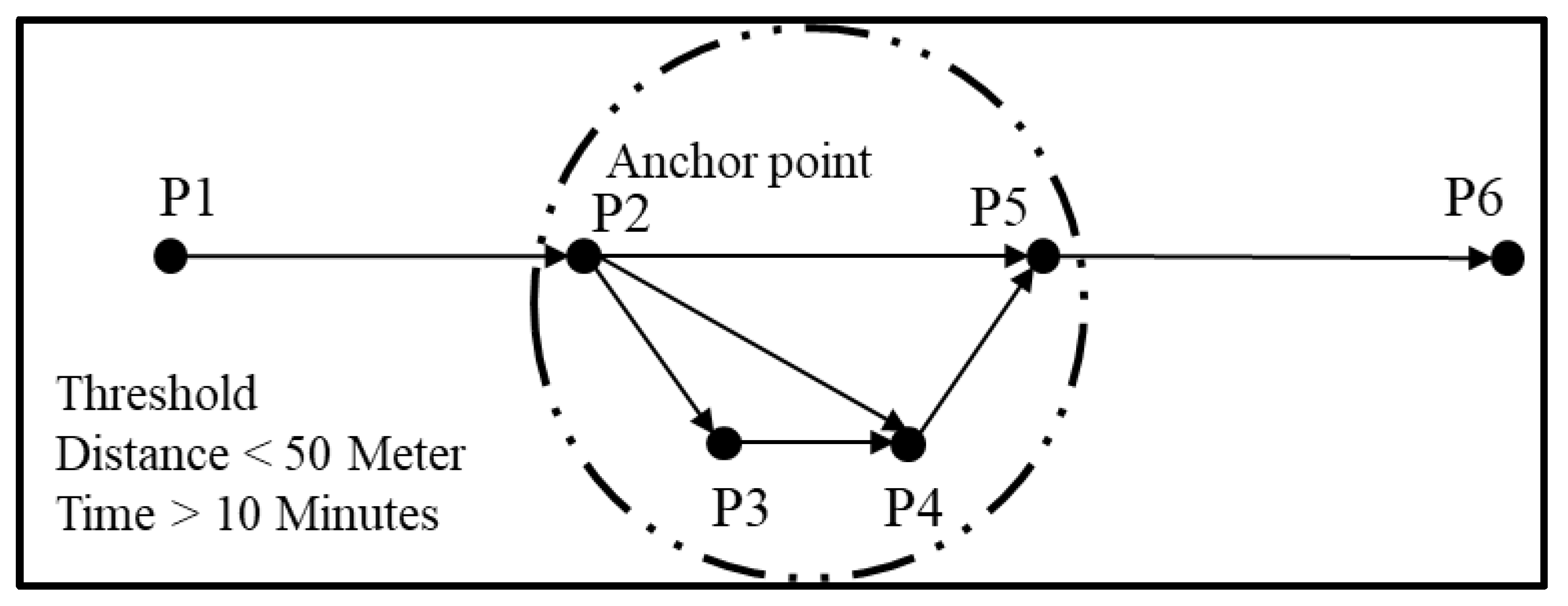
4.2. Stay Point Extraction
4.3. Taxi Origin and Destination
4.4. Taxi Demand
4.5. Vacant Taxi Movement
4.6. Network Travel Time
5. Methodology
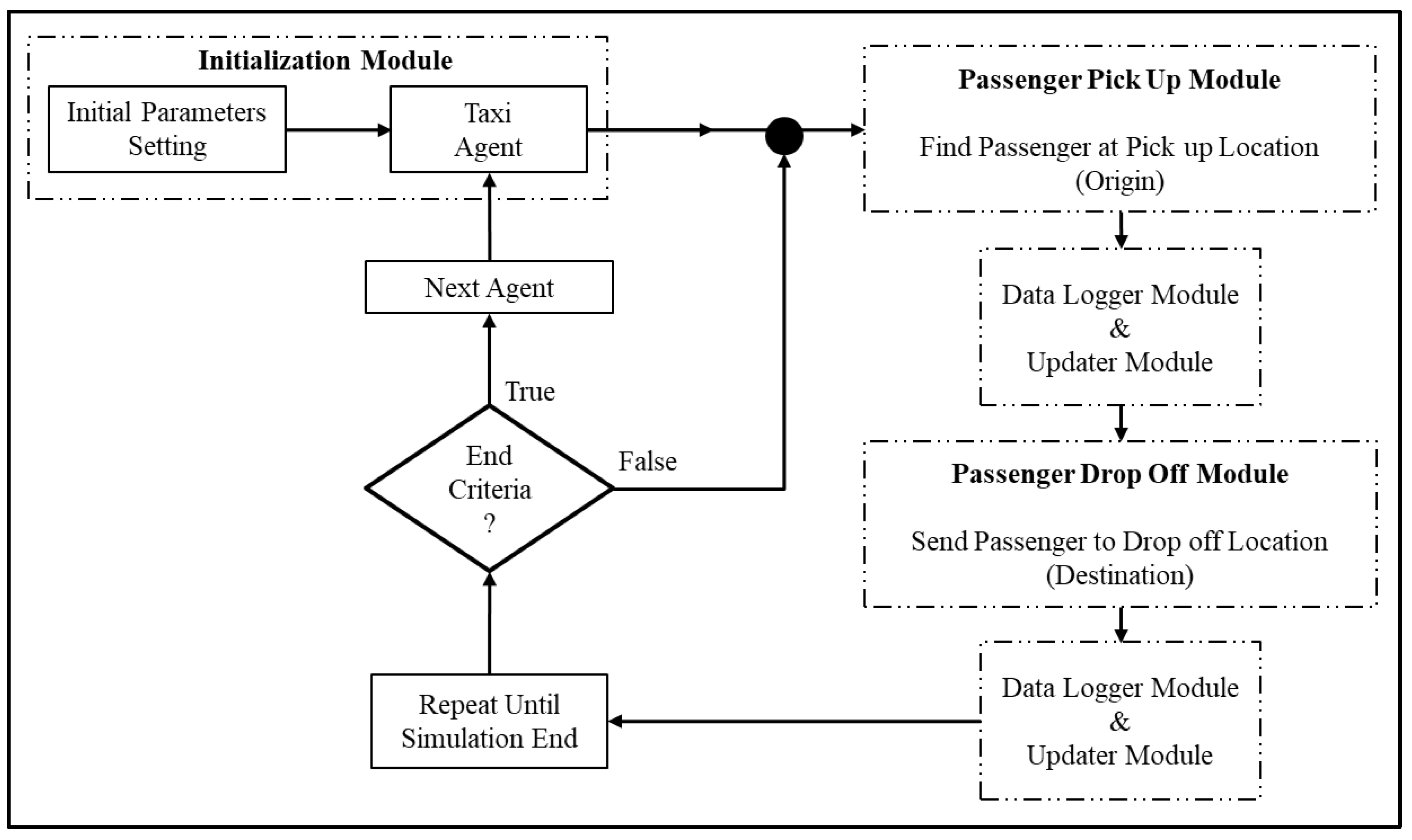
5.1. Agent-Based Model
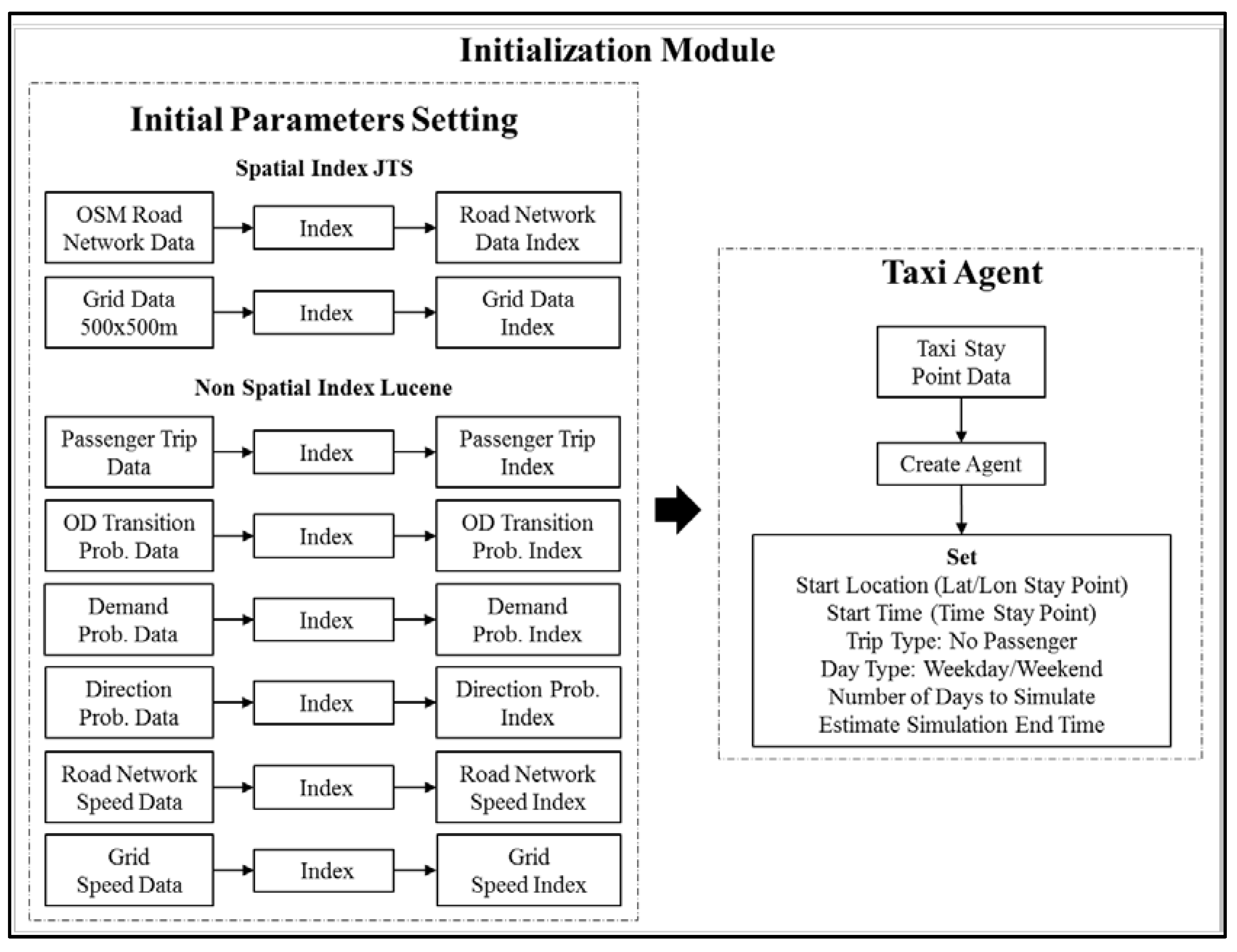
5.2. Initialization Module
5.3. Taxi Agent
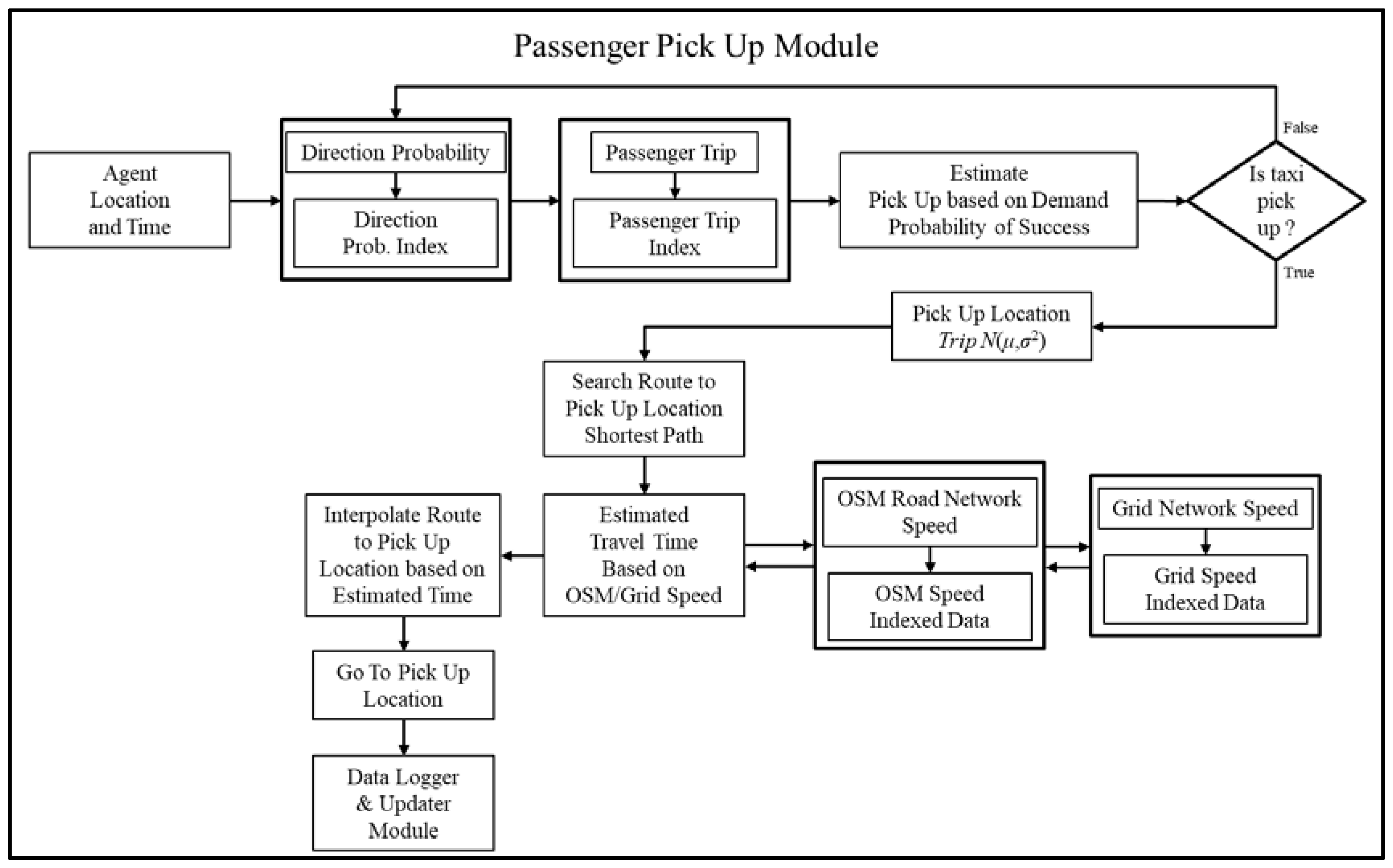
5.4. Passenger Pick-Up Module
5.5. Passenger Drop-Off Module
5.6. Data Logger and Updater Module
6. Results
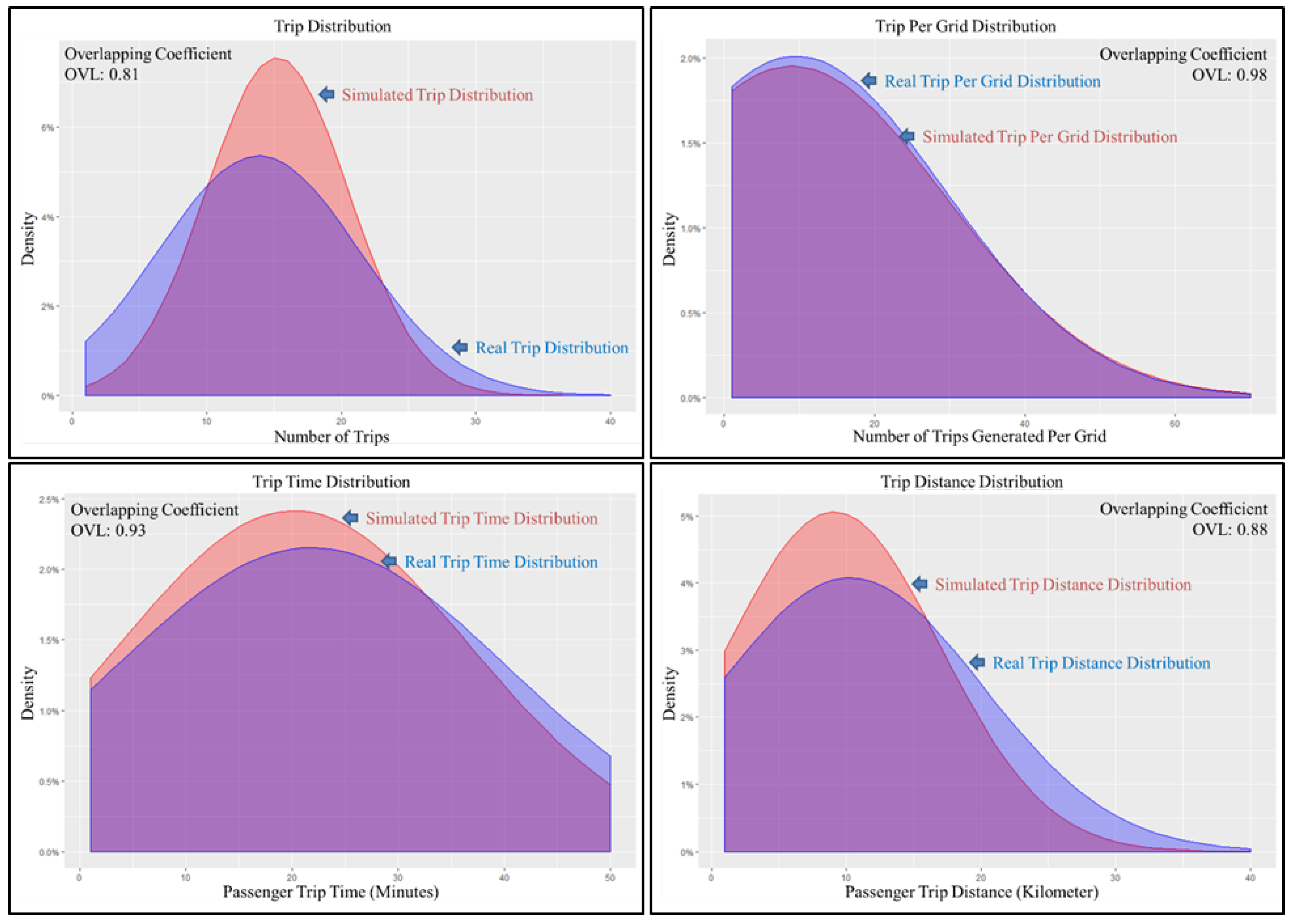
6.1. Distribution Overlapping Coefficient
6.2. Average Speed Hourly Variation
6.3. Taxi Occupancy Evaluation
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Baster, B.; Duda, J.; Maciol, A.; Rebiasz, B. Rule-Based Approach to Human-like Decision Simulating in Agent-Based Modeling and Simulation. In Proceedings of the 2013 17th International Conference on System Theory, Control and Computing (ICSTCC) 2013, Sinaia, Romania, 11–13 October 2013; pp. 739–743. [Google Scholar]
- Bonabeau, E. Agent-Based Modeling: Methods and Techniques for Simulating Human Systems. Proc. Natl. Acad. Sci. USA 2002, 99 (Suppl. 3), 7280–7287. [Google Scholar] [CrossRef] [PubMed]
- Tu, W.; Li, Q.; Fang, Z.; Shaw, S.-L.; Zhou, B.; Chang, X. Optimizing the Locations of Electric Taxi Charging Stations: A Spatial–temporal Demand Coverage Approach. Transp. Res. Part C Emerg. Technol. 2016, 65, 172–189. [Google Scholar] [CrossRef]
- Sadahiro, Y.; Lay, R.; Kobayashi, T. Trajectories of Moving Objects on a Network: Detection of Similarities, Visualization of Relations, and Classification of Trajectories. Trans. GIS 2013, 17, 18–40. [Google Scholar] [CrossRef]
- Miwa, T.; Sakai, T.; Morikawa, T. Route Identification and Travel Time Prediction Using Probe-Car Data. Int. J. ITS Res. 2004, 2, 21–28. [Google Scholar]
- Cheng, S.F.; Nguyen, T.D. TaxiSim: A Multiagent Simulation Platform for Evaluating Taxi Fleet Operations. In Proceedings of the 2011 IEEE/WIC/ACM International Conferences on Web Intelligence and Intelligent Agent Technology, Lyon, France, 22–27 August 2011; Volume 2, pp. 14–21. [Google Scholar]
- Bischoff, J.; Maciejewski, M.; Sohr, A. Analysis of Berlin’s Taxi Services by Exploring GPS Traces. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 209–215. [Google Scholar]
- Yuan, N.J.; Zheng, Y.; Zhang, L.; Xie, X. T-Finder: A Recommender System for Finding Passengers and Vacant Taxis. IEEE Trans. Knowl. Data Eng. 2013, 25, 2390–2403. [Google Scholar] [CrossRef]
- Moreira-Matias, L.; Gama, J.; Ferreira, M.; Mendes-Moreira, J.; Damas, L. On Predicting the Taxi-Passenger Demand: A Real-Time Approach. In Progress in Artificial Intelligence; Correia, L., Reis, L.P., Cascalho, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8154 LNAI, pp. 54–65. [Google Scholar]
- Maciejewski, M.; Salanova, J.M.; Bischoff, J.; Estrada, M. Large-Scale Microscopic Simulation of Taxi Services. Berlin and Barcelona Case Studies. J. Ambient Intell. Humaniz. Comput. 2016, 7, 385–393. [Google Scholar] [CrossRef][Green Version]
- Abar, S.; Theodoropoulos, G.K.; Lemarinier, P.; O’Hare, G.M.P. Agent Based Modelling and Simulation Tools: A Review of the State-of-Art Software. Comput. Sci. Rev. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Grau, J.M.S.; Romeu, M.A.E. Agent Based Modelling for Simulating Taxi Services. Procedia Comput. Sci. 2015, 52, 902–907. [Google Scholar] [CrossRef]
- Raychaudhuri, S. Introduction to Monte Carlo Simulation. In Proceedings of the 2008 WSC Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008; pp. 91–100. [Google Scholar]
- Deng, Z.; Ji, M. Spatiotemporal Structure of Taxi Services in Shanghai: Using Exploratory Spatial Data Analysis. In Proceedings of the 2011 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; pp. 1–5. [Google Scholar]
- Wong, K.I.; Wong, S.C.; Bell, M.G.H.; Yang, H. Modeling the Bilateral Micro-Searching Behavior for Urban Taxi Services Using the Absorbing Markov Chain Approach. J. Adv. Transp. 2005, 39, 81–104. [Google Scholar] [CrossRef]
- Yuan, J.; Zheng, Y.; Zhang, L.; Xie, X.; Sun, G. Where to Find My Next Passenger? In Proceedings of the 13th International Conference on Ubiquitous Computing, Beijing, China, 17–21 September 2011; pp. 109–118. [Google Scholar]
- Li, B.; Zhang, D.; Sun, L.; Chen, C.; Li, S.; Qi, G.; Yang, Q. Hunting or Waiting? Discovering Passenger-Finding Strategies from a Large-Scale Real-World Taxi Dataset. In Proceedings of the 2011 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Seattle, WA, USA, 21–25 March 2011; pp. 63–68. [Google Scholar]
- Szeto, W.Y.; Wong, R.C.P.; Wong, S.C.; Yang, H. A Time-Dependent Logit-Based Taxi Customer-Search Model. Int. J. Urban Sci. 2013, 17, 184–198. [Google Scholar] [CrossRef]
- Wong, R.C.P.; Szeto, W.Y.; Wong, S.C. A Cell-Based Logit-Opportunity Taxi Customer-Search Model. Transp. Res. Part C Emerg. Technol. 2014, 48, 84–96. [Google Scholar] [CrossRef]
- 2Wong, R.C.P.; Szeto, W.Y.; Wong, S.C. Behavior of Taxi Customers in Hailing Vacant Taxis: A Nested Logit Model for Policy Analysis. J. Adv. Transp. 2015, 49, 867–883. [Google Scholar]
- 2Wong, R.C.P.; Szeto, W.Y.; Wong, S.C. A Two-Stage Approach to Modeling Vacant Taxi Movements. Transp. Res. Procedia 2015, 7, 254–275. [Google Scholar]
- Chakka, V.P.; Everspaugh, A.C.; Patel, J.M. Indexing Large Trajectory Data Sets with SETI. In Proceedings of the CIDR Conference on Innovative Data Systems Research, Asilomar, CA, USA, 5–8 January 2003. [Google Scholar]
- Zhang, Y.; Li, J. Research and Improvement of Search Engine Based on Lucene. In Proceedings of the 2009 International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; pp. 270–273. [Google Scholar]
- Witayangkurn, A.; Horanont, T.; Shibasaki, R. The Design of Large Scale Data Management for Spatial Analysis on Mobile Phone Dataset. Asian J. Geoinform. 2013, 13, 17–24. [Google Scholar]
- Ranjit, S.; Nagai, M.; Witayangkurn, A.; Shibasaki, R. Sensitivity Analysis of Map Matching Techniques of High Sampling Rate GPS Data Point of Probe Taxi on Dense Open Street Map Road Network of Bangkok in a Large-Scale Data Computing Platform. In Proceedings of the 15th International Conference on Computers in Urban Planning and Urban Management, Adelaide, Australia, 11–14 July 2017. [Google Scholar]
- Nam, D.; Hyun, K.; Kim, H.; Ahn, K.; Jayakrishnan, R. Analysis of Grid Cell–Based Taxi Ridership with Large-Scale GPS Data. Transp. Res. Rec. J. Transp. Res. Board 2016, 2544, 131–140. [Google Scholar] [CrossRef]
- Castro, P.S.; Zhang, D.; Chen, C.; Li, S.; Pan, G. From Taxi GPS Traces to Social and Community Dynamics: A Survey. ACM Comput. Surv. 2013, 46, 1–34. [Google Scholar] [CrossRef]
- Li, Q.; Zheng, Y.; Xie, X.; Chen, Y.; Liu, W.; Ma, W.Y. Mining User Similarity Based on Location History. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008. [Google Scholar]
- Zheng, Y.U. Trajectory Data Mining: An Overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–41. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters a Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, OR, USA, 2–4 August 1996. [Google Scholar]
- Gan, J.; Tao, Y. DBSCAN Revisited: Mis-Claim, Un-Fixability, and Approximation. In Proceedings of the 2015 ACM SIGMOD IInternational Conference on Management of Data, Melbourne, Victoria, Australia, 31 May 31–4 June 2015; pp. 519–530. [Google Scholar]
- Wong, D.W.S.; Huang, Q. Sensitivity of DBSCAN in Identifying Activity Zones Using Online Footprints. In Proceedings of the Spatial Accuracy 2016, Montpellier, France, 5–8 July 2016; pp. 151–156. [Google Scholar]
- Campello, R.J.G.B.; Moulavi, D.; Sander, J. Density-Based Clustering Based on Hierarchical Density Estimates. In Advances in Knowledge Discovery and Data Mining; Springer: London, UK, 2013; pp. 160–172. [Google Scholar]
- Gonzales, E.; Yang, C.; Morgul, F.; Ozbay, K. Modeling Taxi Demand with GPS Data from Taxis and Transit; Mineta National Transit Research Consortium: San Jose, CA, USA, 2014. [Google Scholar]
- Ge, Q.; Fukuda, D. Updating Origin-Destination Matrices with Aggregated Data of GPS Traces. Transp. Res. Part C Emerg. Technol. 2016, 69, 291–312. [Google Scholar] [CrossRef]
- Moreira-Matias, L.; Gama, J.; Ferreira, M.; Mendes-Moreira, J.; Damas, L. Time-Evolving O-D Matrix Estimation Using High-Speed GPS Data Streams. Expert Syst. Appl. 2016, 44, 275–288. [Google Scholar] [CrossRef]
- Zhang, D.; He, T.; Lin, S.; Munir, S.; Stankovic, J.A. Taxi-Passenger-Demand Modeling Based on Big Data from a Roving Sensor Network. IEEE Trans. Big Data 2016, 3, 362–374. [Google Scholar] [CrossRef]
- Ke, J.; Zheng, H.; Yang, H.; Chen, X.M. Short-Term Forecasting of Passenger Demand under on-Demand Ride Services: A Spatio-Temporal Deep Learning Approach. Transp. Res. Part C Emerg. Technol. 2017, 85, 591–608. [Google Scholar] [CrossRef]
- Lv, H.; Fang, F.; Zhao, Y.; Liu, Y.; Luo, Z. A Performance Evaluation Model for Taxi Cruising Path Recommendation System. In Advances in Knowledge Discovery and Data Mining; Kim, J., Shim, K., Cao, L., Lee, J.-G., Lin, X., Moon, Y.-S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 10235 LNAI, pp. 156–167. [Google Scholar]
- Grau, J.M.S.; Moreira-Matias, L.; Saadallah, A.; Tzenos, P.; Aifadopoulou, G.; Chaniotakis, E.; Romeu, M.A.E. Informed versus Non-Informed Taxi Drivers: Agent-Based Simulation Framework for Assessing Their Performance. In Proceedings of the Transportation Research Board 97th Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Liu, K.; Yamamoto, T.; Morikawa, T. An Analysis of the Cost Efficiency of Probe Vehicle Data at Different Transmission Frequencies. Int. J. ITS Res. 2006, 4, 21–28. [Google Scholar]
- Liu, K.; Yamamoto, T.; Morikawa, T. Comparison of Time/space Polling Schemes for a Probe Vehicle System. In Proceedings of the 14th World Conference on Intelligent Transport Systems, Beijing, China, 9–13 October 2007. [Google Scholar]
- Wang, Y.; Zhu, Y.; He, Z.; Yue, Y.; Li, Q. Challenges and Opportunities in Exploiting Large-Scale GPS Probe Data; Technical Report HPL-2011-109; HP Laboratories: Palo Alto, CA, USA, 2011. [Google Scholar]
- Helbing, D. Agent-Based Modeling. In Social Self-Organization: Agent-Based Simulations and Experiments to Study Emergent Social Behavior; Helbing, D., Ed.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 25–70. [Google Scholar]
- Sekimoto, Y.; Shibasaki, R.; Kanasugi, H.; Usui, T.; Shimazaki, Y. PFlow: Reconstruction of People Flow by Recycling Large-Scale Fragmentary Social Survey Data. IEEE Pervasive Comput. 2011, 10, 27–35. [Google Scholar] [CrossRef]
- Kanasugi, H.; Sekimoto, Y.; Kurokawa, M.; Watanabe, T.; Muramatsu, S.; Shibasaki, R. Spatiotemporal Route Estimation Consistent with Human Mobility Using Cellular Network Data. In Proceedings of the 2013 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, USA, 18–22 March 2013; pp. 267–272. [Google Scholar]
- Inman, H.F.; Bradley, E.L. The Overlapping Coefficient as a Measure of Agreement Between Probability Distributions and Point Estimation of the Overlap of Two Normal Densities. Commun. Stat. Theory Methods 1989, 18, 3851–3874. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Parameter | Description | Sample |
|---|---|---|
| IMEI | International mobile equipment identification number. | 10015646 |
| Latitude | Geographic coordinate of the taxi regarding decimal degree. | 13.749 |
| Longitude | 100.553 | |
| Speed | The speed of a moving taxi in km/hr. | 42 |
| Direction | The direction of a moving taxi in degree. | 208 |
| Error | Error status of for each GPS data point. | 0 |
| Engine | Engine status (0/1): 0 indicates the engine is off; 1 indicates the engine is on. | 1 |
| Meter | Passenger occupancy status (0/1): 0 indicate taxi with no passenger; 1 indicates taxi with a passenger. | 0 |
| Timestamp | Unix epoch timestamp. Time system which is described as a number of seconds elapsed since 00:00:00 coordinated universal time, 1 January 1970. | 1388509240 |
| Data source | Indicates the type of vehicle from which the data are being transmitted. | 9 |
| Date: 1 June 2015; Day Type: Weekday | ||||||
|---|---|---|---|---|---|---|
| Passenger Trip | ||||||
| IMEI | Pick-Up Grid | Drop-Off Grid | Pick-Up Time | Drop-Off Time | Trip Distance (km) | Trip Time (min) |
| 10012462 | 200000035920 | 200000036681 | 9:04:56 | 9:09:57 | 2.34 | 5.02 |
| 10012462 | 200000036680 | 200000040994 | 9:22:01 | 15:44:16 | 62.35 | 382.25 |
| Non-Passenger Trip | ||||||
| IMEI | Drop-Off Grid | Pick-Up Grid | Drop-Off Time | Pick-Up Time | Trip Distance (km) | Trip Time (min) |
| 10012462 | 200000036681 | 200000036680 | 9:09:57 | 9:22:01 | 2.95 | 12.07 |
| 10012462 | 200000040994 | 200000037087 | 15:44:16 | 16:35:59 | 17.63 | 51.72 |
| Weekday | |||||
|---|---|---|---|---|---|
| Type | Simulated Data | Real Data | Overlapping Coefficient | ||
| Mean | Standard Deviation | Mean | Standard Deviation | ||
| Trip Count | 15.24 | 5.27 | 13.87 | 7.44 | 0.81 |
| Grid Trip Generated | 9.02 | 20.42 | 9.57 | 19.82 | 0.98 |
| Passenger Trip Time (min) | 20.18 | 16.50 | 21.81 | 18.50 | 0.93 |
| Passenger Trip Distance (km) | 9.09 | 7.87 | 10.31 | 9.78 | 0.88 |
| Weekend | |||||
|---|---|---|---|---|---|
| Type | Simulated Data | Real Data | Overlapping Coefficient | ||
| Mean | Standard Deviation | Mean | Standard Deviation | ||
| Trip Count | 13.31 | 4.86 | 15.78 | 8.58 | 0.70 |
| Grid Trip Generated | 8.18 | 20.68 | 11.50 | 23.81 | 0.91 |
| Passenger Trip Time (min) | 19.17 | 16.13 | 20.37 | 16.70 | 0.96 |
| Passenger Trip Distance (km) | 9.01 | 7.91 | 10.74 | 10.02 | 0.86 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ranjit, S.; Witayangkurn, A.; Nagai, M.; Shibasaki, R. Agent-Based Modeling of Taxi Behavior Simulation with Probe Vehicle Data. ISPRS Int. J. Geo-Inf. 2018, 7, 177. https://doi.org/10.3390/ijgi7050177
Ranjit S, Witayangkurn A, Nagai M, Shibasaki R. Agent-Based Modeling of Taxi Behavior Simulation with Probe Vehicle Data. ISPRS International Journal of Geo-Information. 2018; 7(5):177. https://doi.org/10.3390/ijgi7050177
Chicago/Turabian StyleRanjit, Saurav, Apichon Witayangkurn, Masahiko Nagai, and Ryosuke Shibasaki. 2018. "Agent-Based Modeling of Taxi Behavior Simulation with Probe Vehicle Data" ISPRS International Journal of Geo-Information 7, no. 5: 177. https://doi.org/10.3390/ijgi7050177
APA StyleRanjit, S., Witayangkurn, A., Nagai, M., & Shibasaki, R. (2018). Agent-Based Modeling of Taxi Behavior Simulation with Probe Vehicle Data. ISPRS International Journal of Geo-Information, 7(5), 177. https://doi.org/10.3390/ijgi7050177