Use of Tencent Street View Imagery for Visual Perception of Streets

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
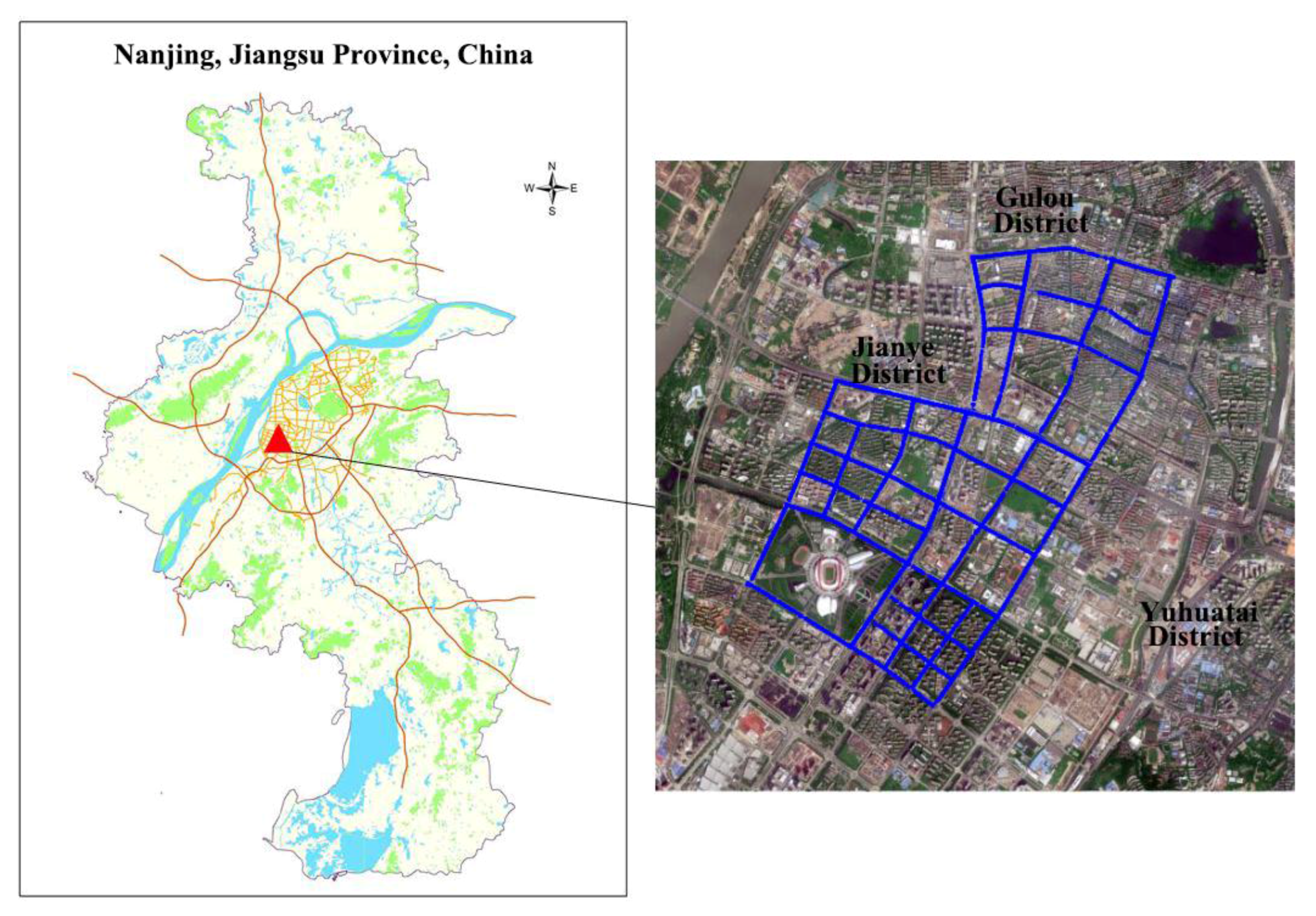
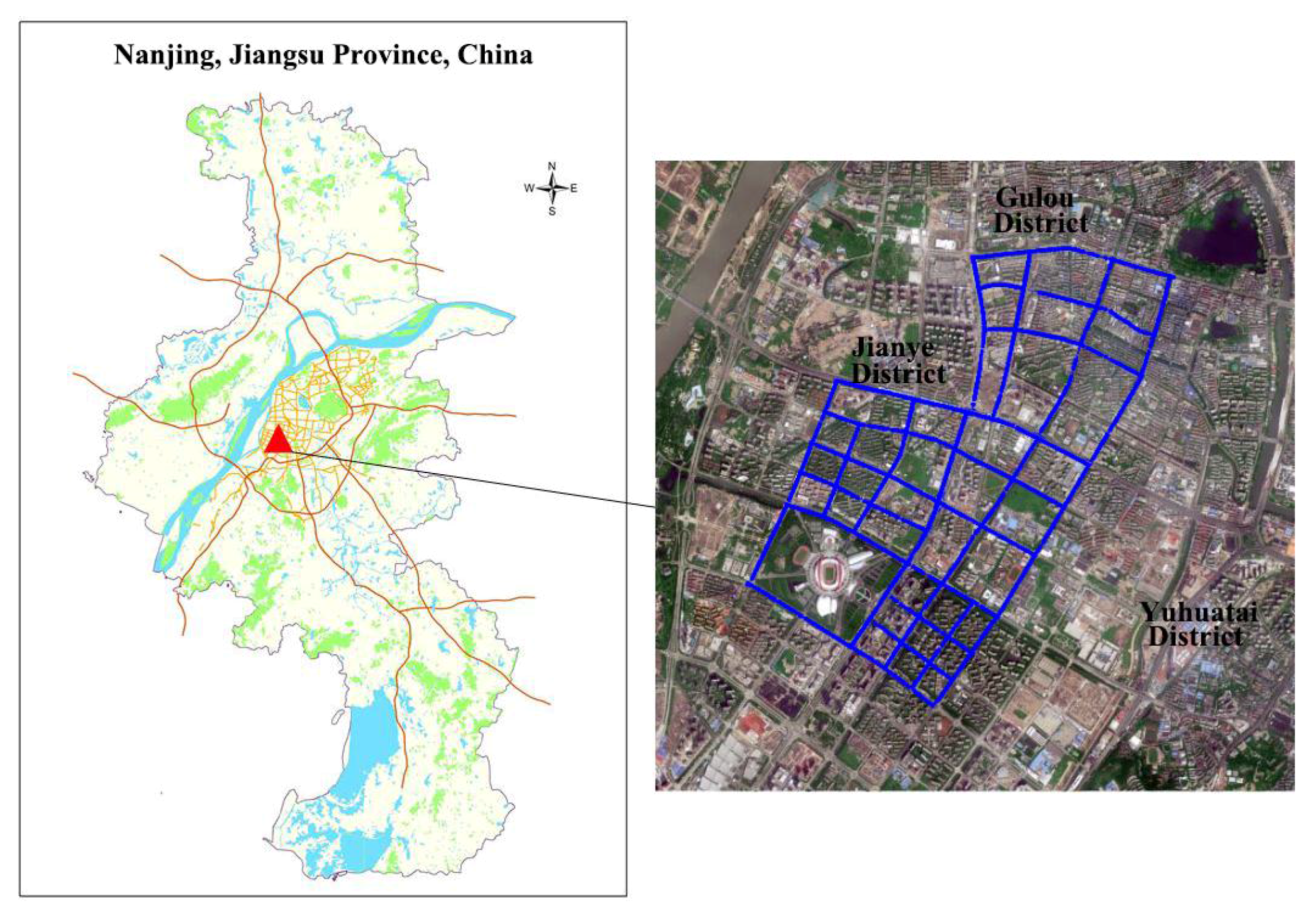
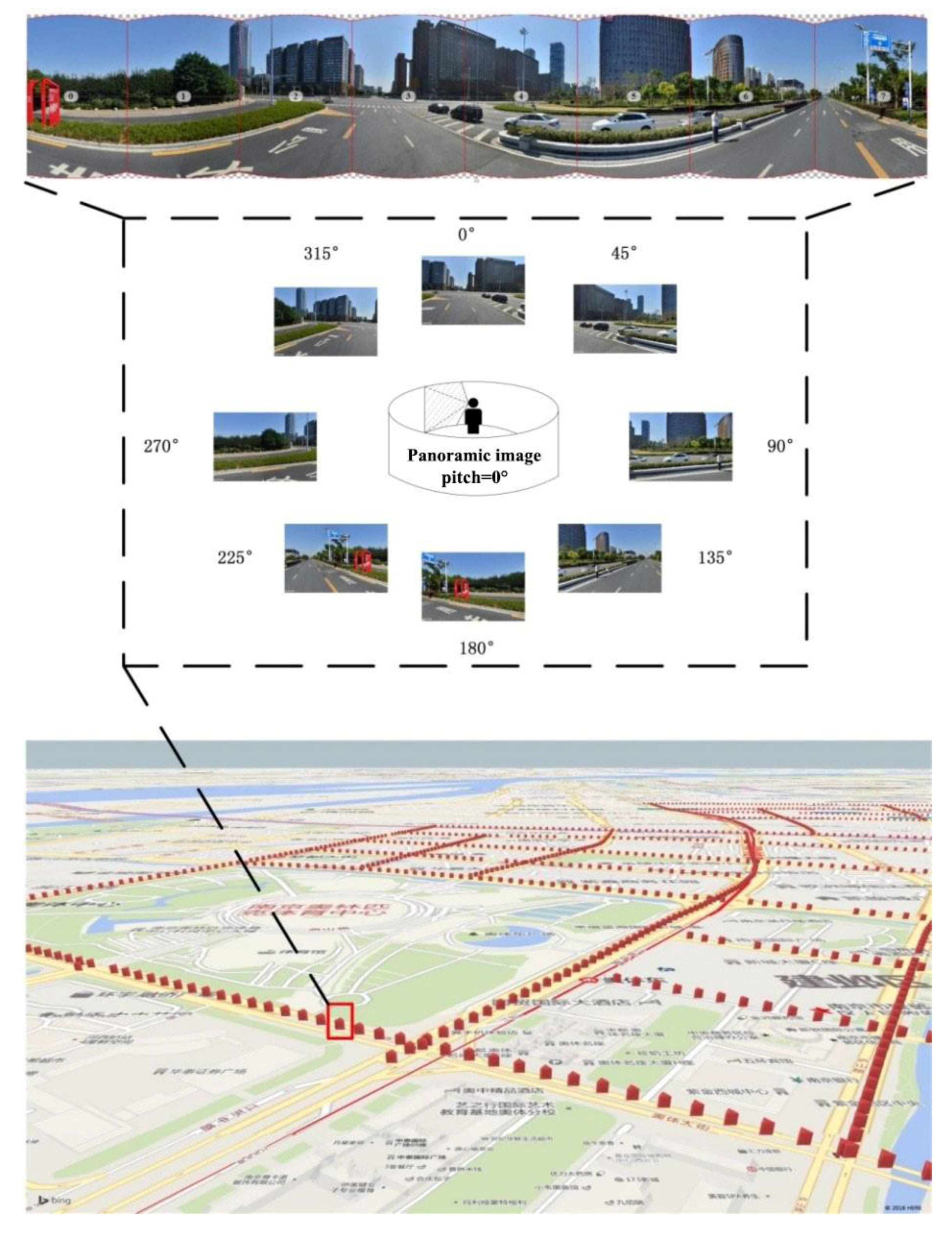
2. Study Area and Data
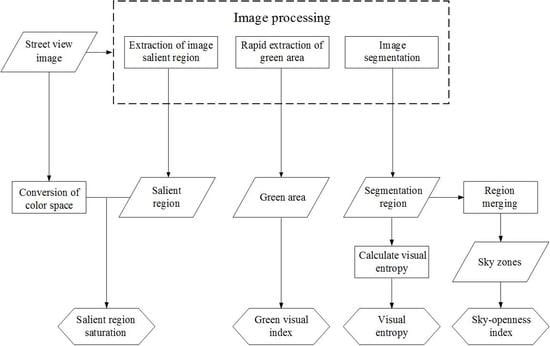
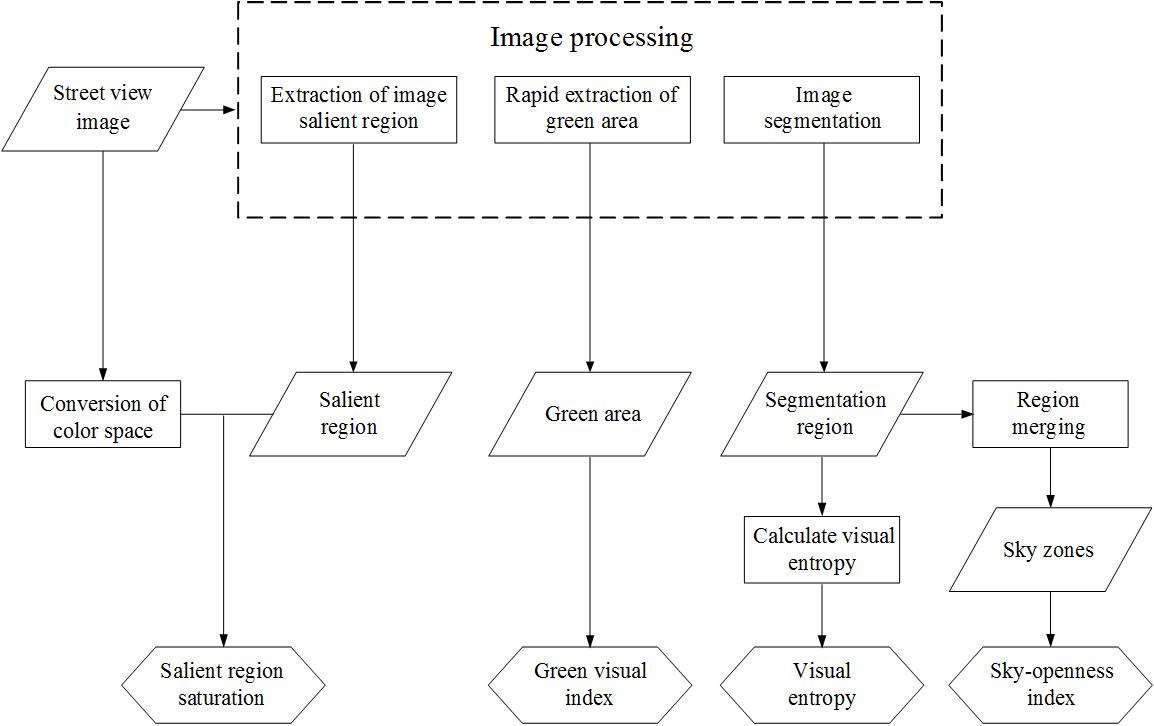
3. Methods
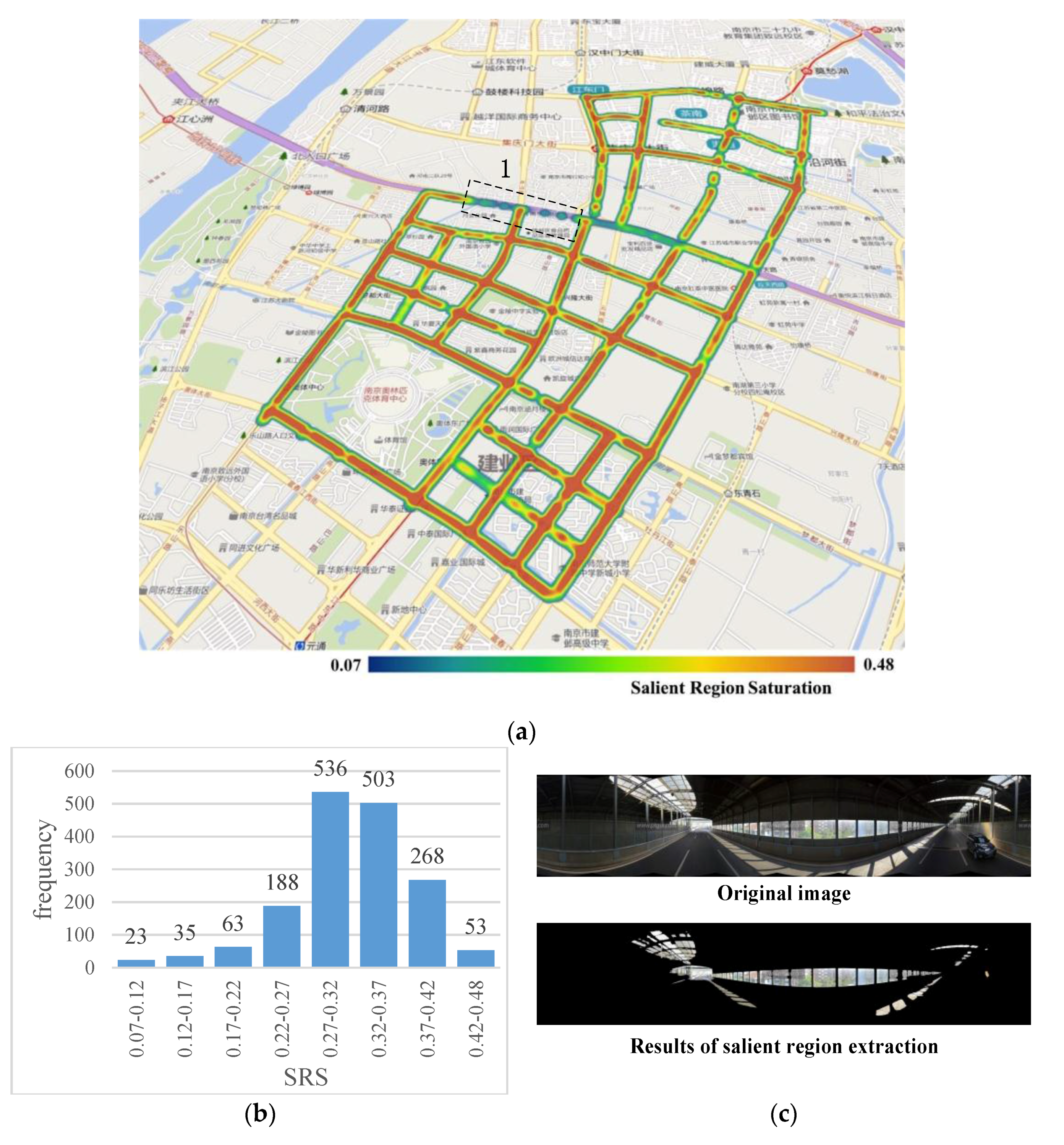
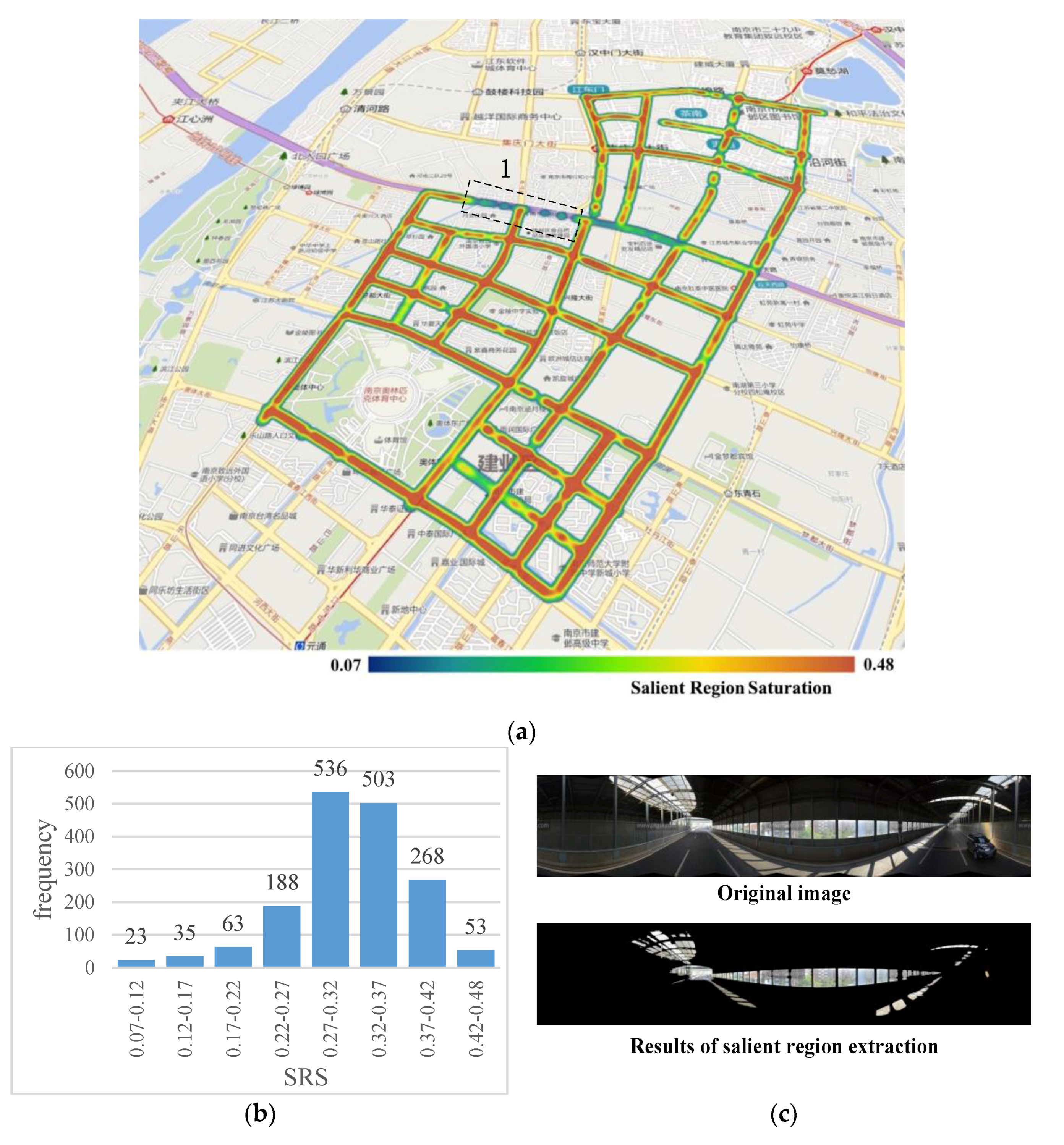
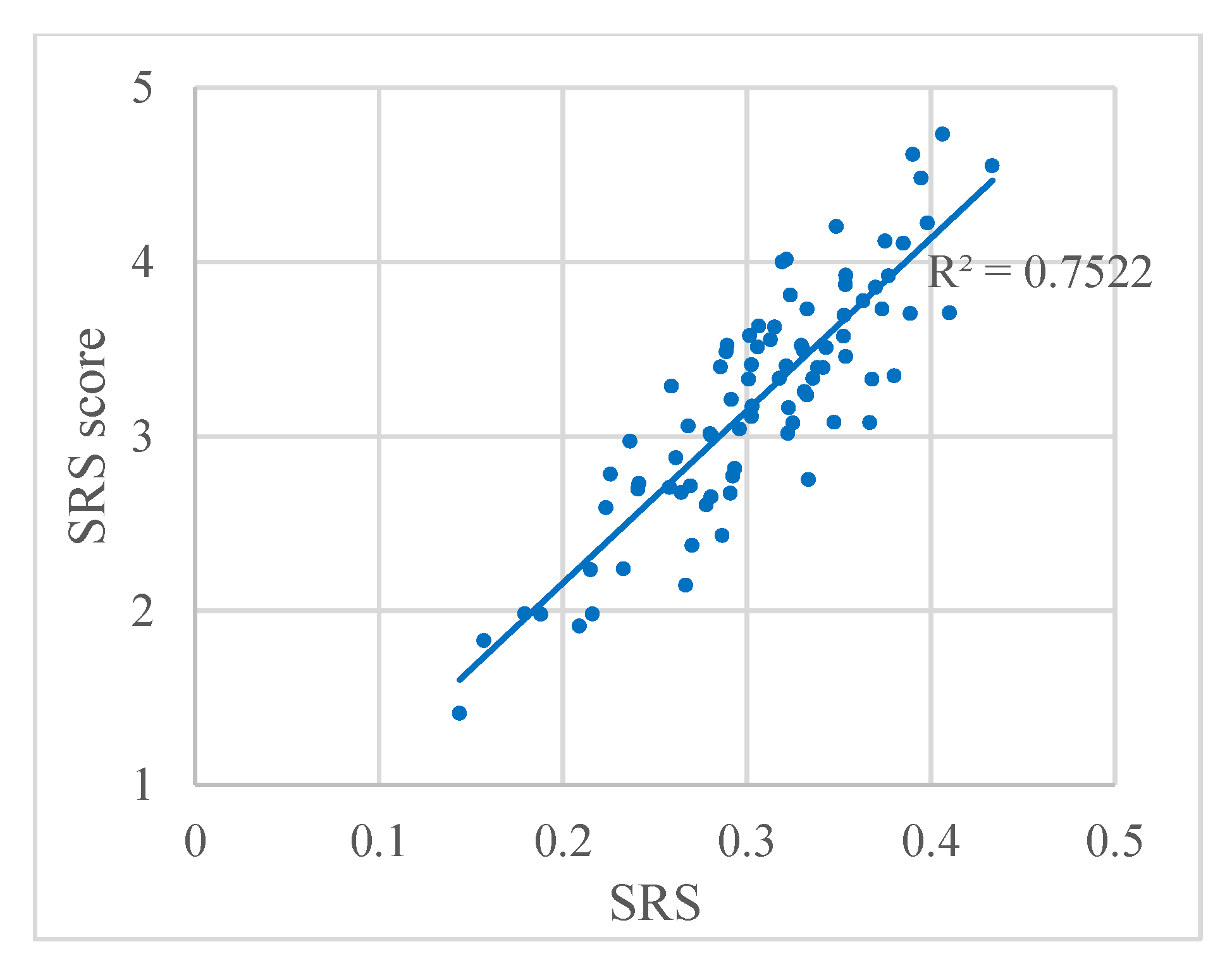
3.1. Salient Region Saturation
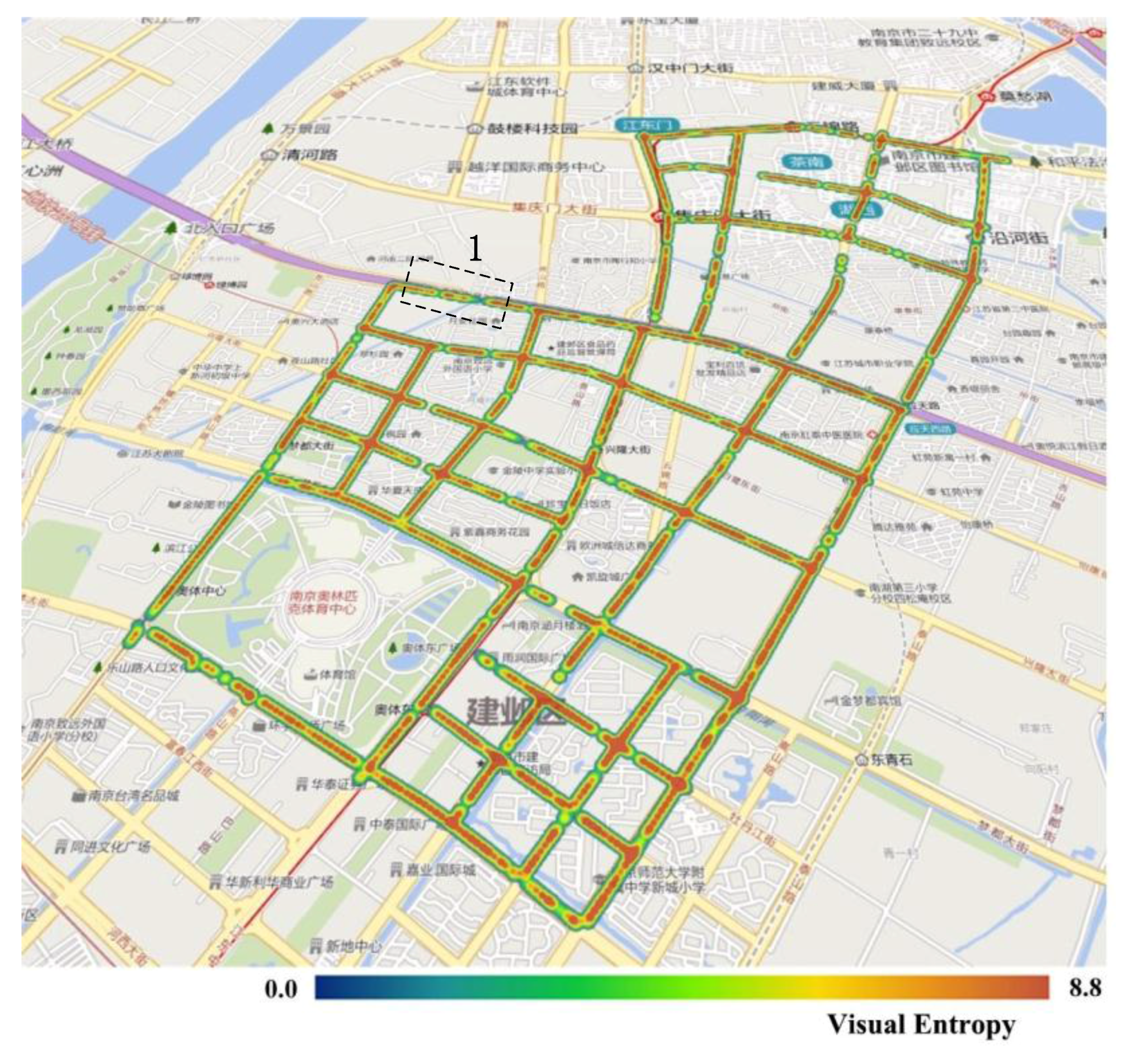
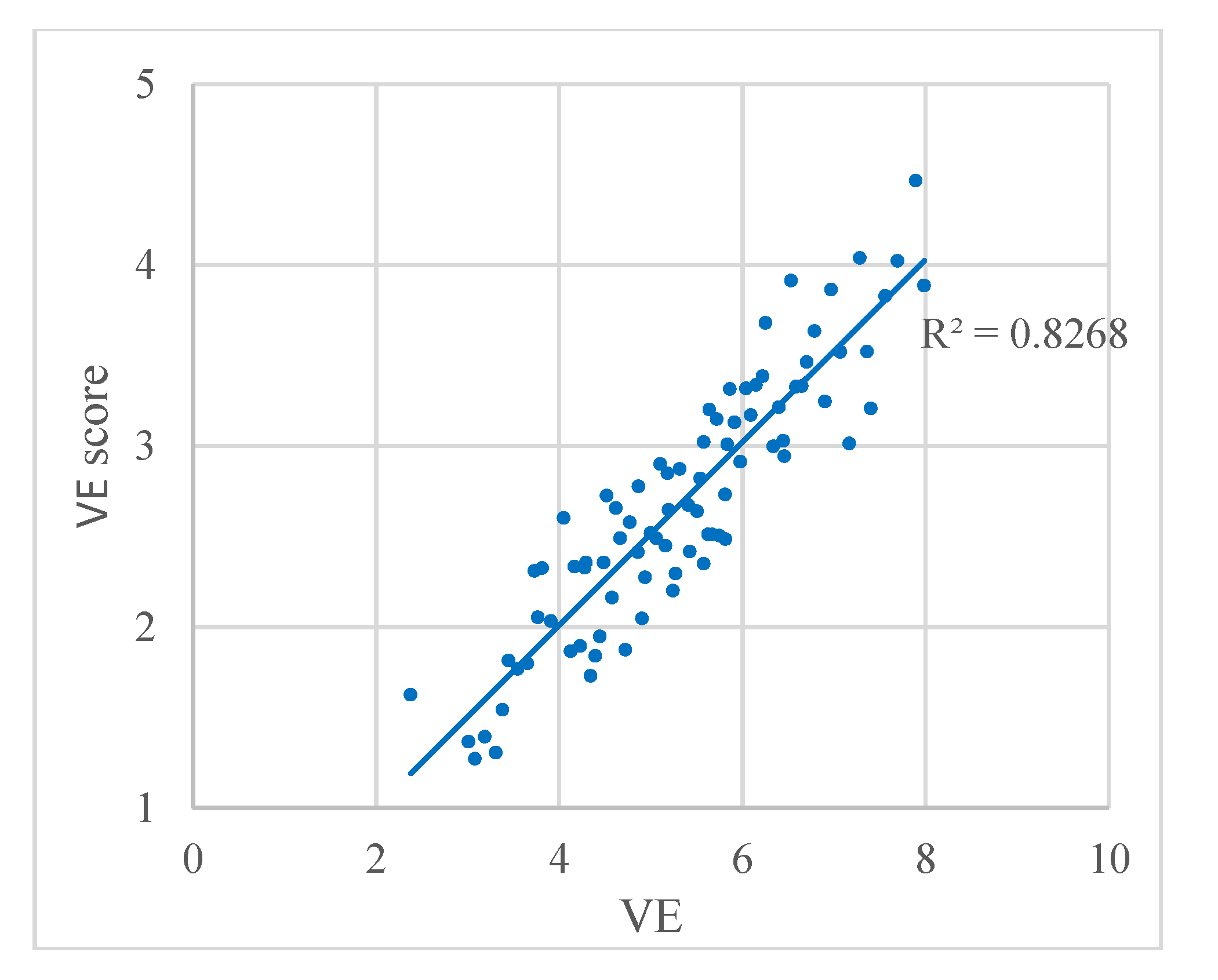
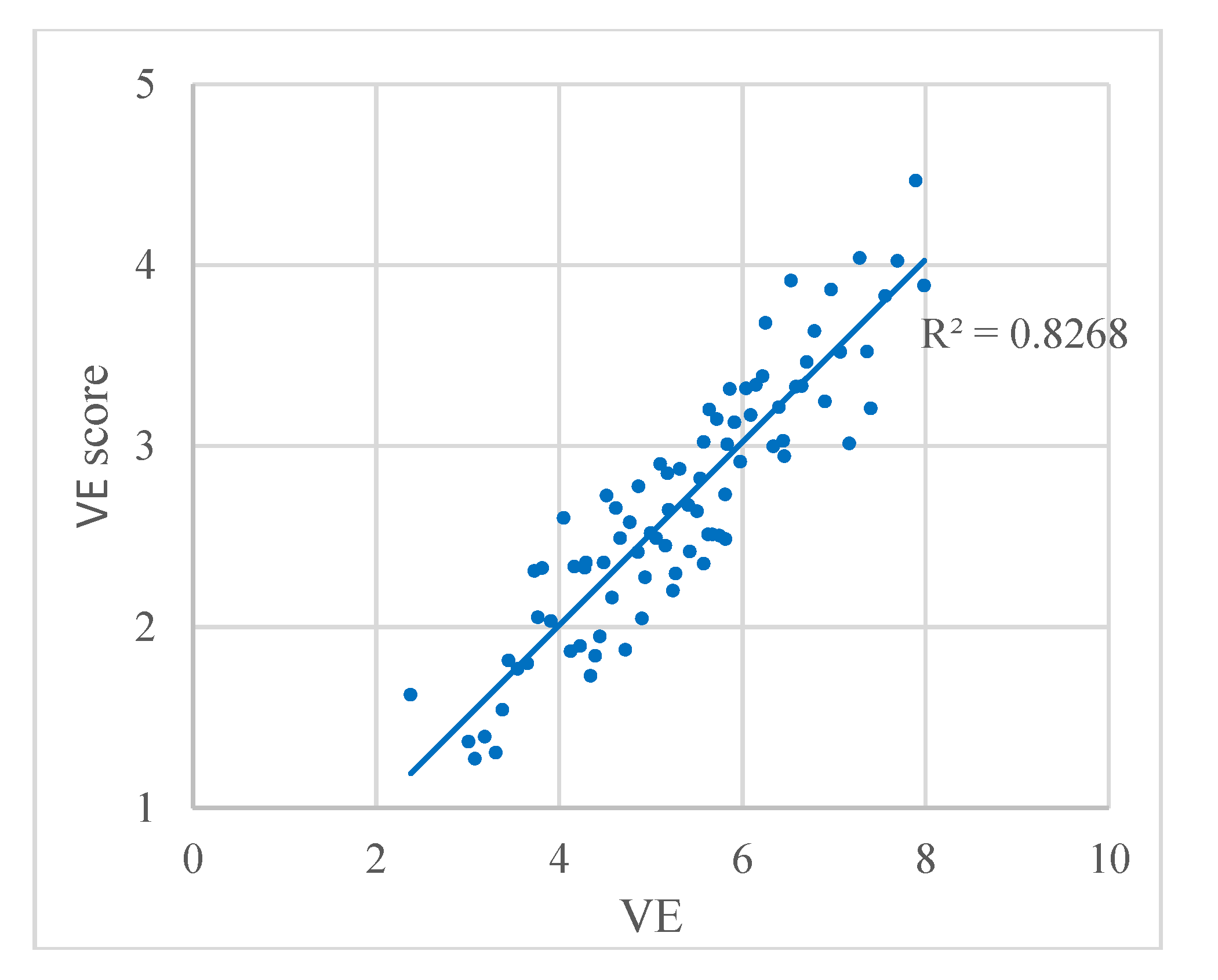
3.2. Visual Entropy
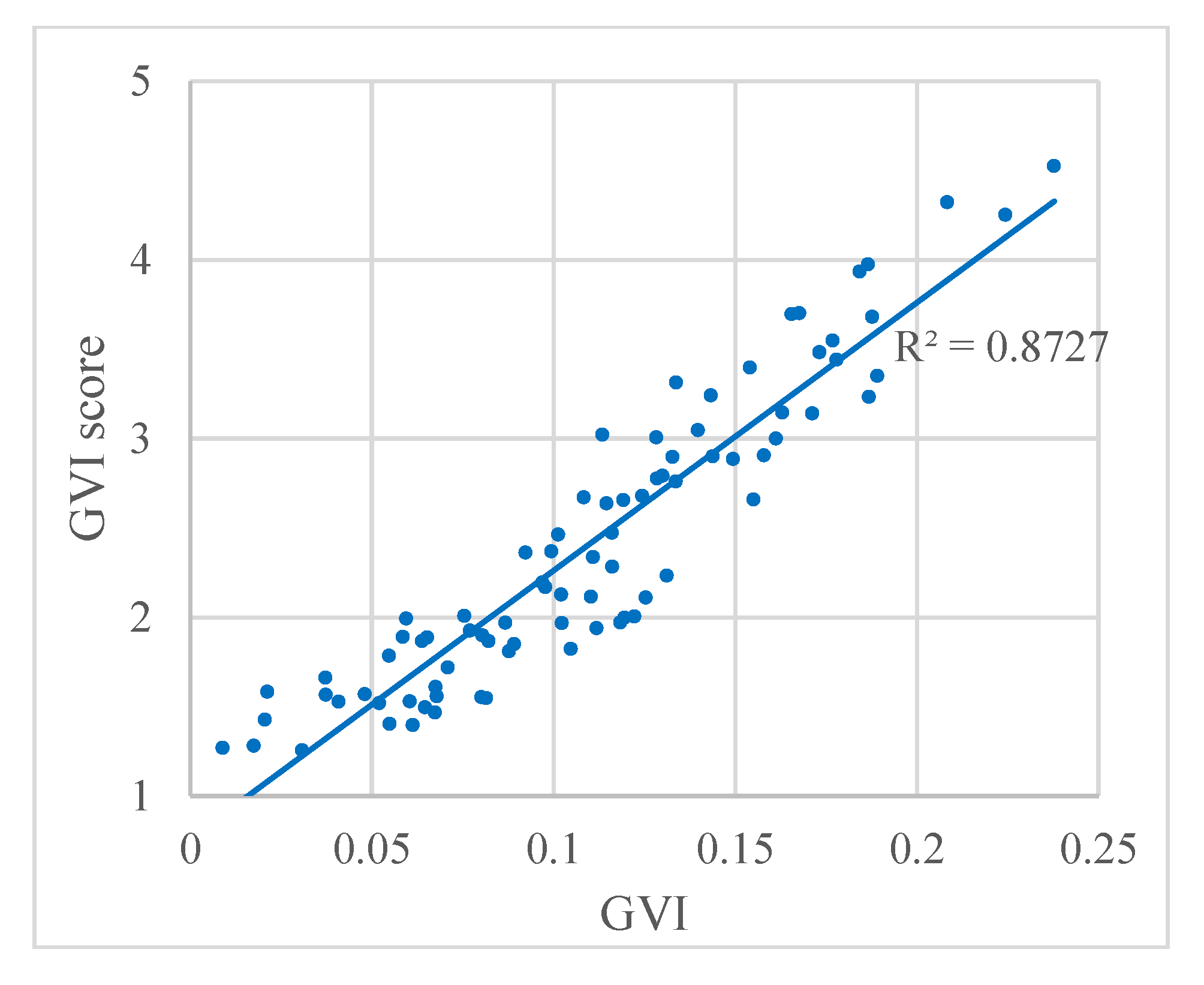
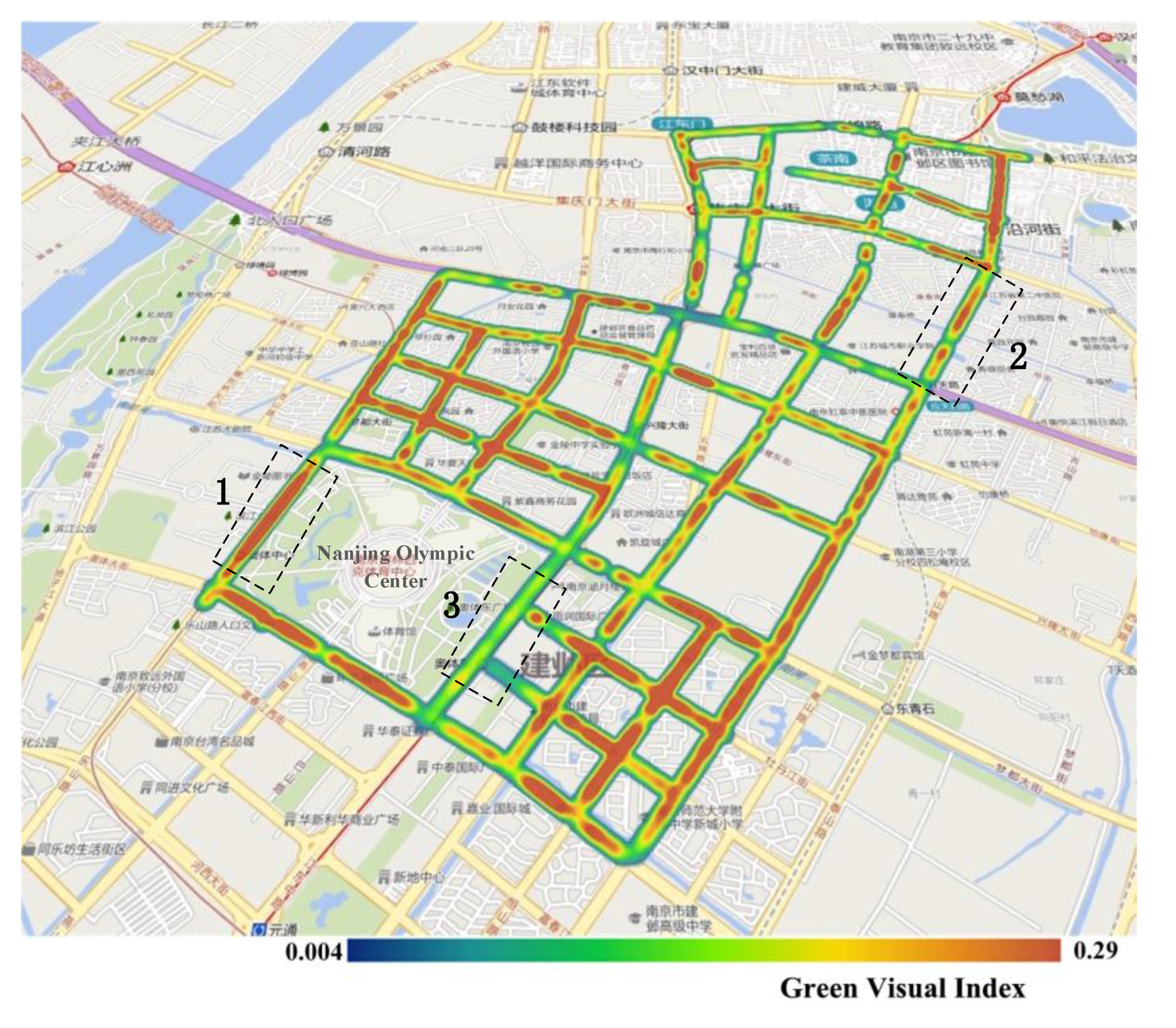
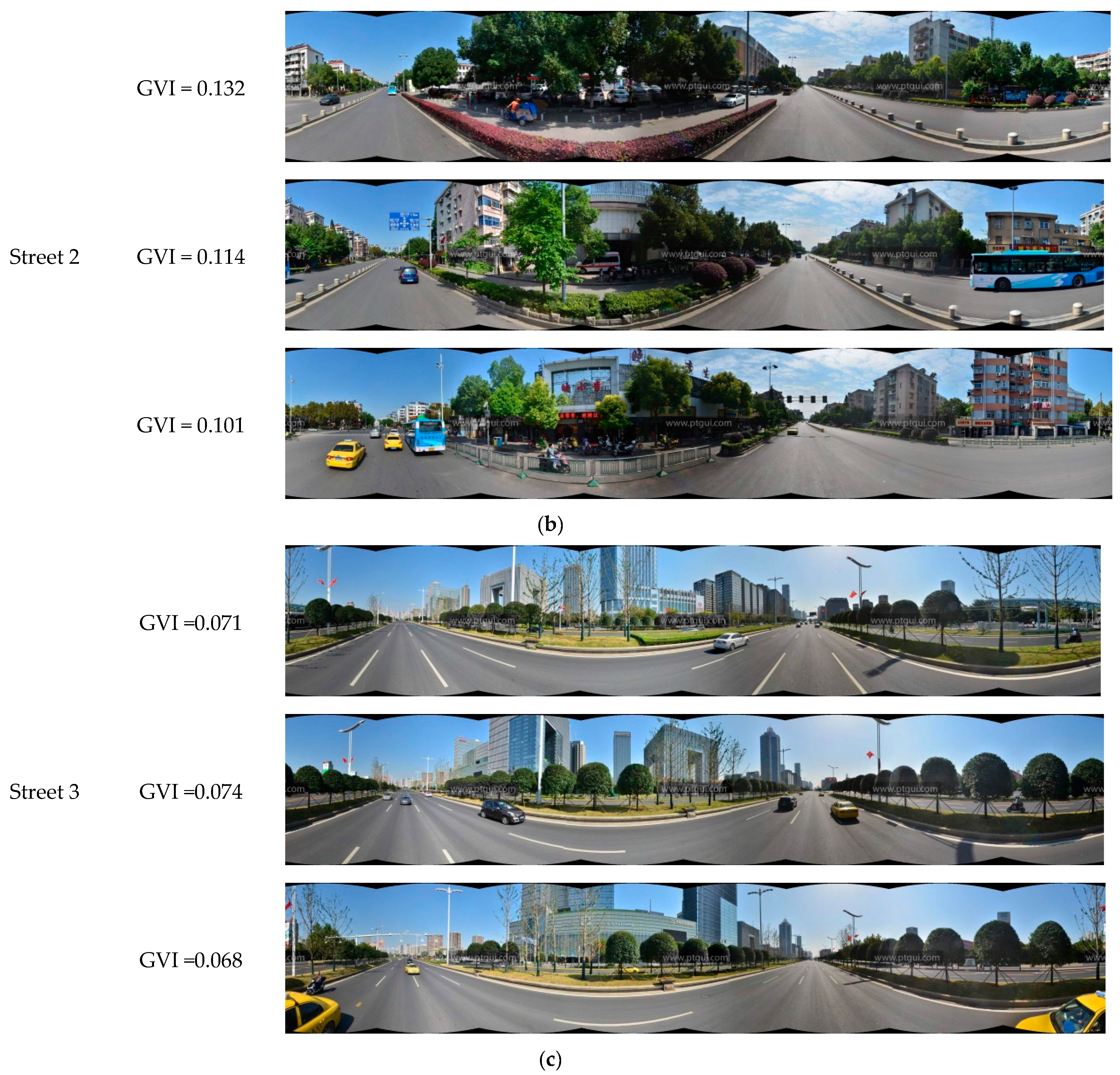
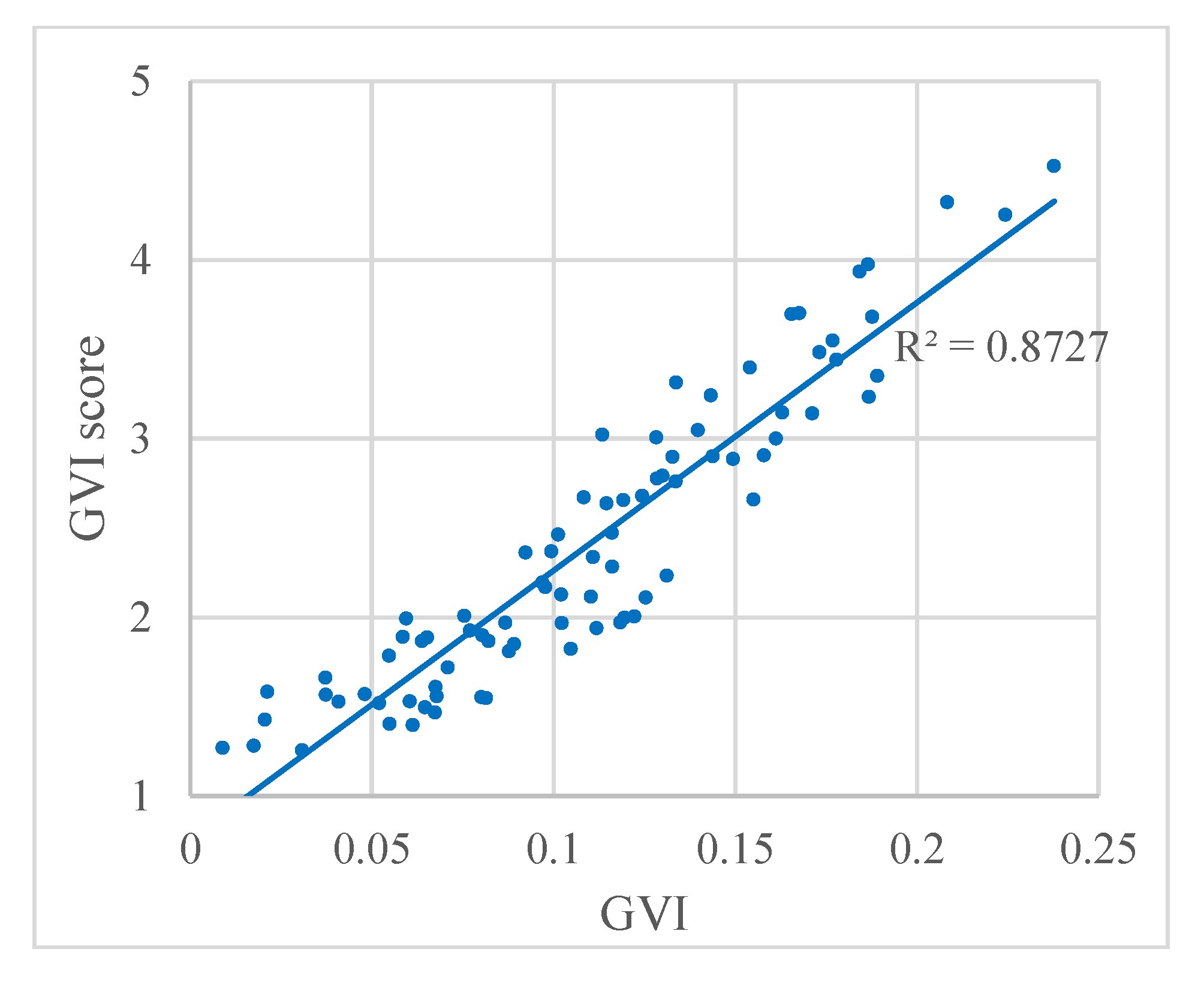
3.3. Green View Index
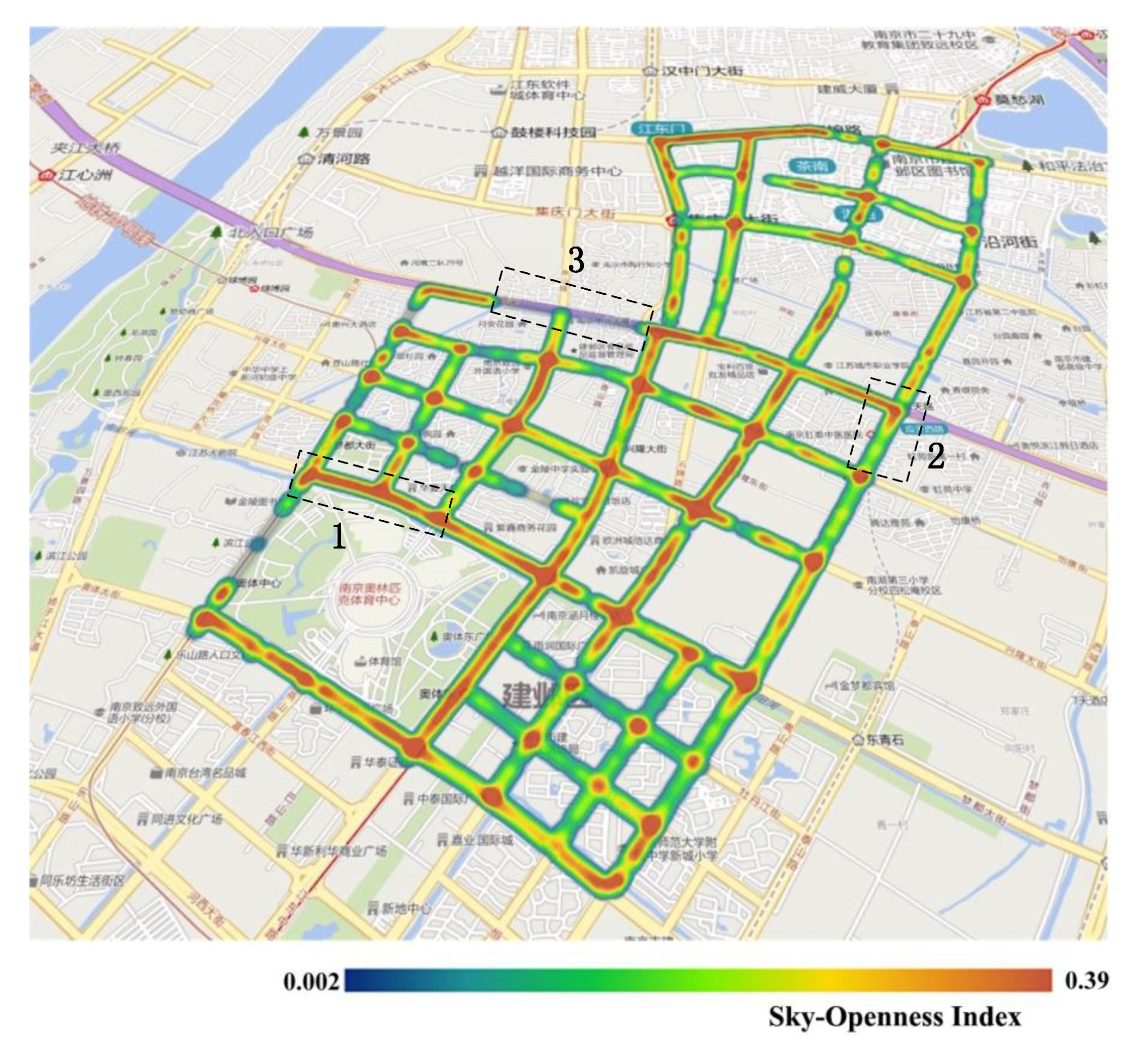
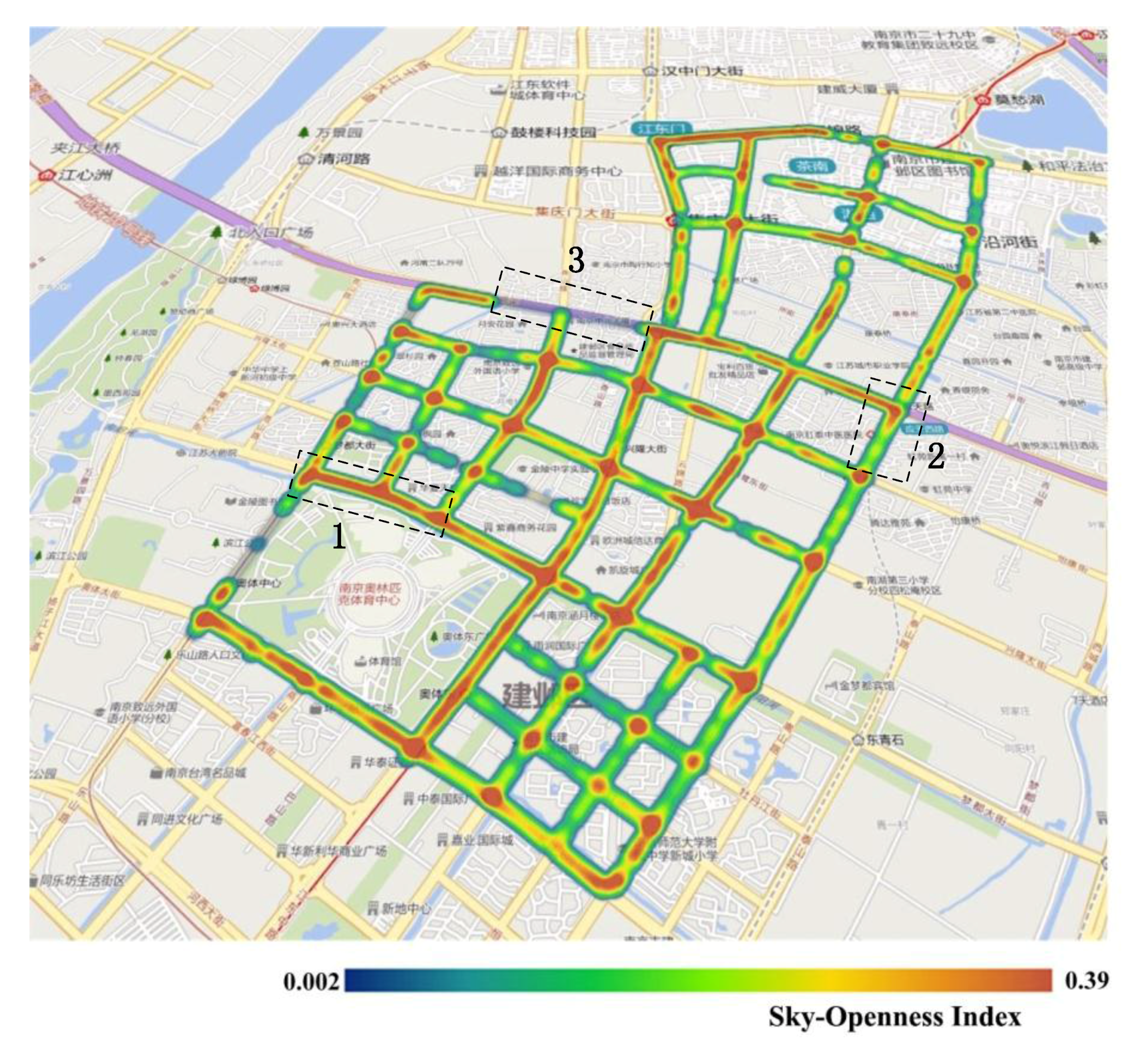
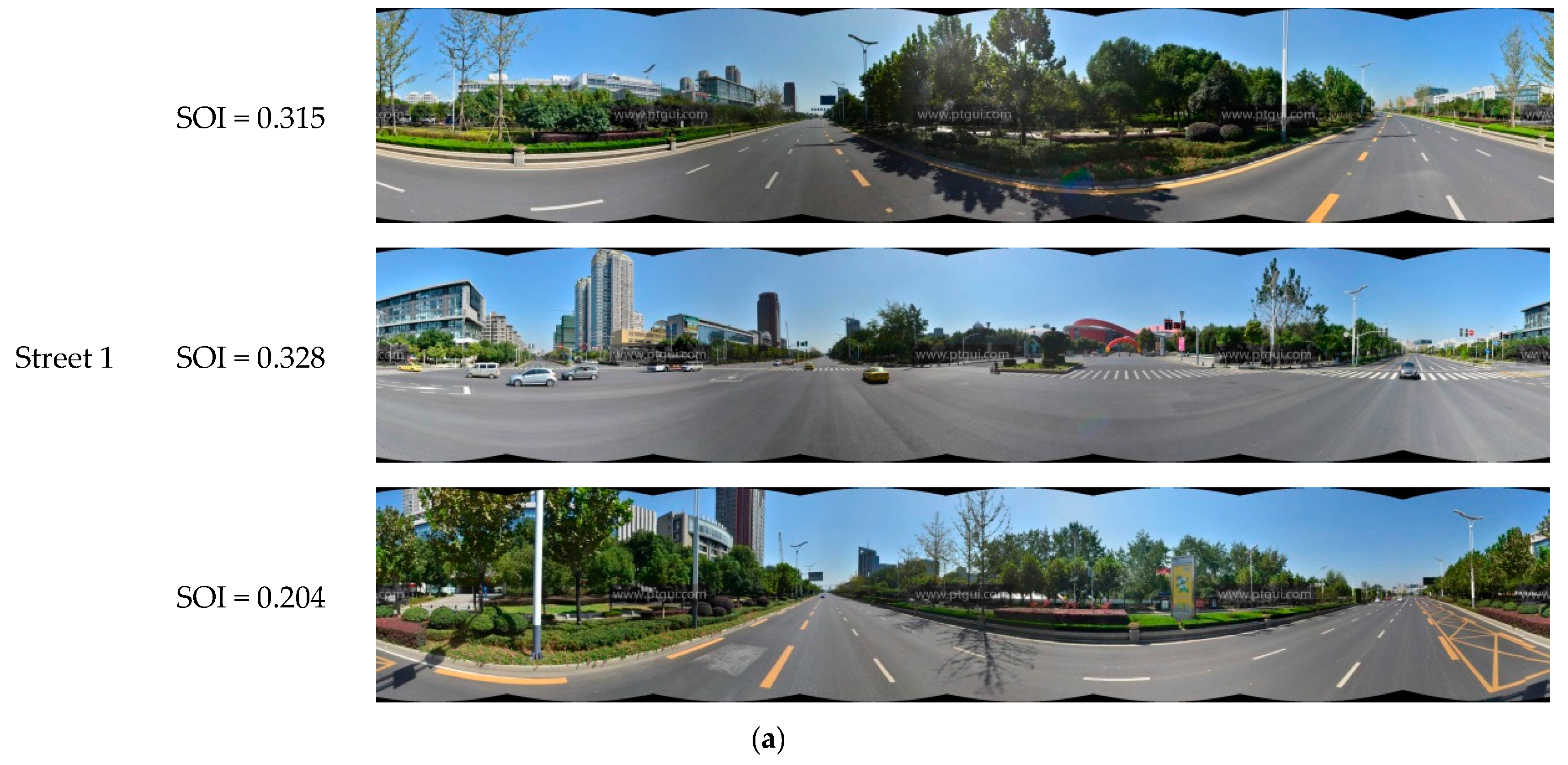
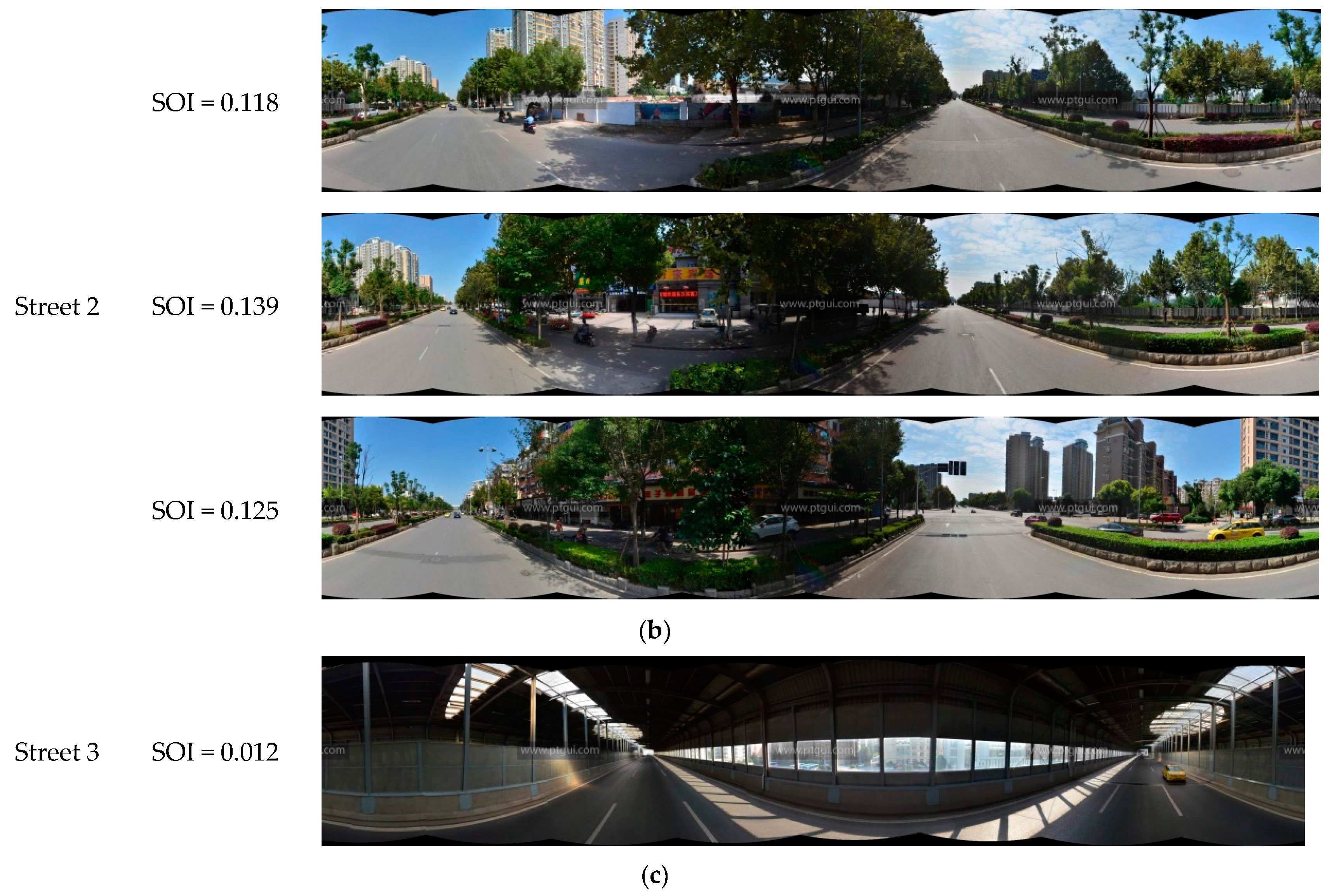
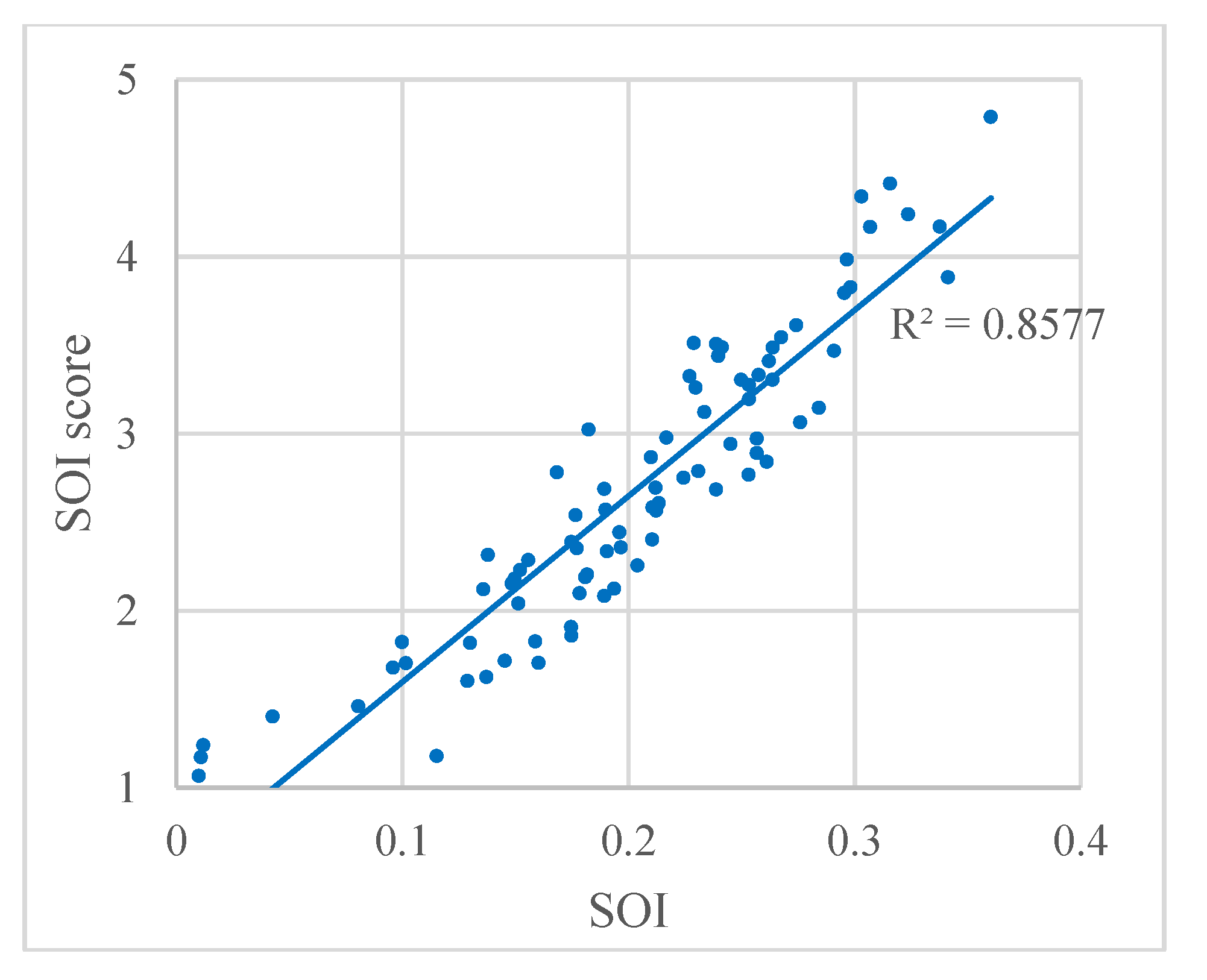
3.4. Sky-Openness Index
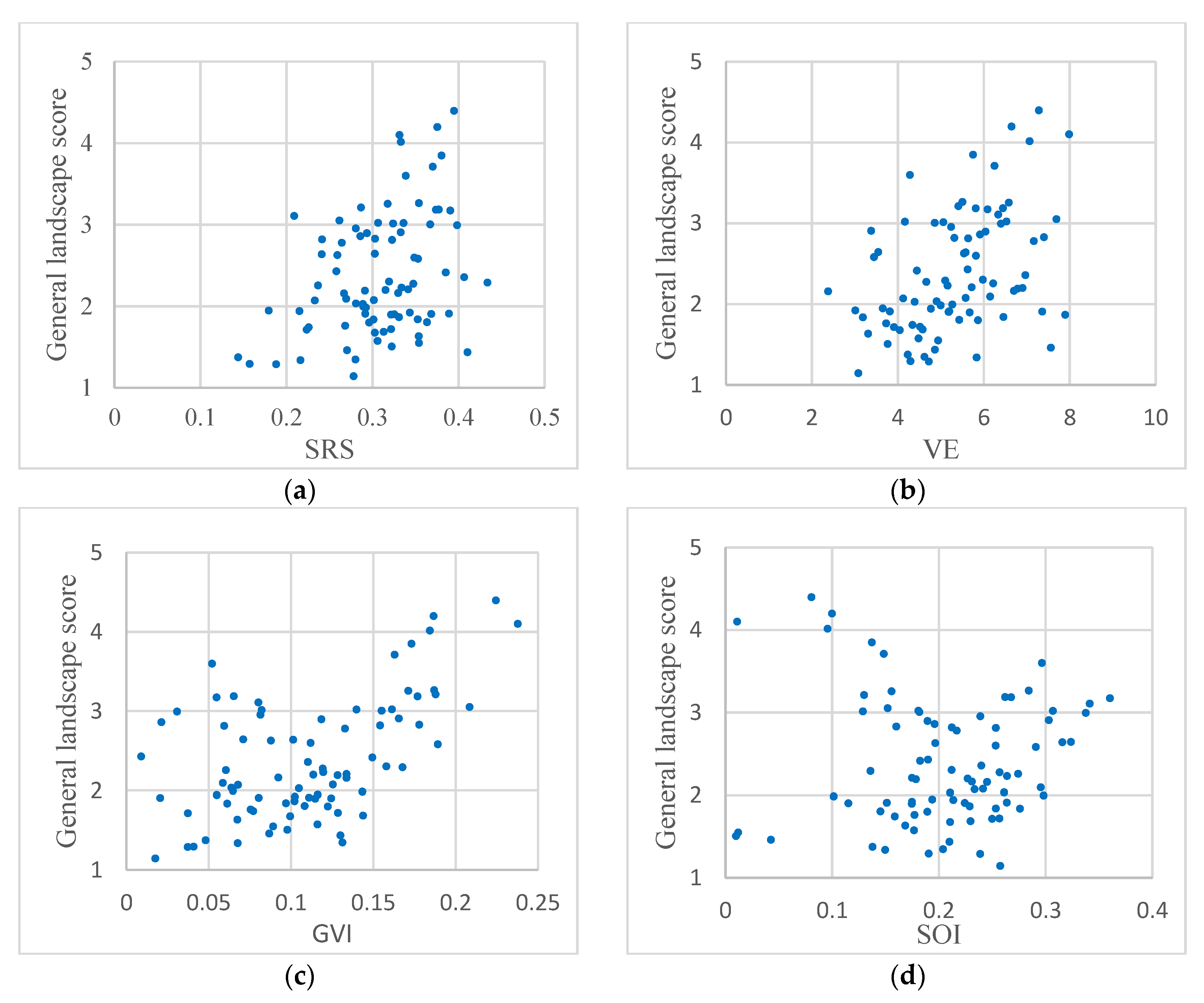
3.5. Evaluation Method
4. Results and Discussion
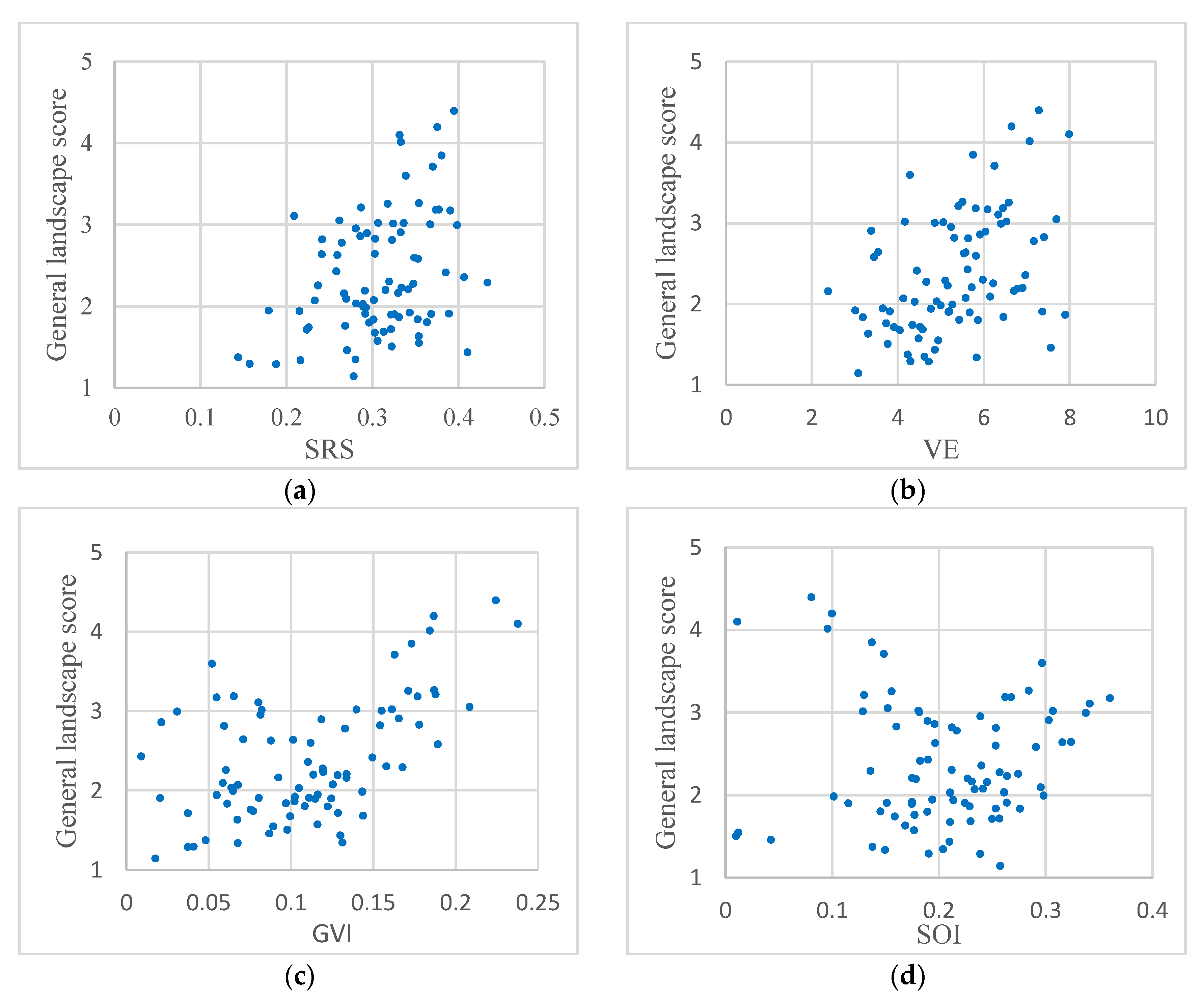
4.1. Salient Region Saturation
4.2. Visual Entropy
4.3. Green View Index
4.4. Sky-Openness Index
4.5. General Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Strom, E. The Street: A quintessential social public space. J. Urban Technol. 2015, 22, 139–141. [Google Scholar] [CrossRef]
- Ozkan, U.Y. Assessment of visual landscape quality using IKONOS imagery. Environ. Monit. Assess. 2014, 186, 4067. [Google Scholar] [CrossRef] [PubMed]
- Clay, G.R.; Smidt, R.K. Assessing the validity and reliability of descriptor variables used in scenic highway analysis. Landsc. Urban Plan. 2004, 66, 239–255. [Google Scholar] [CrossRef]
- Swimmer, E.; Whiteman, J.; Taintor, R. Byway Beginnings: Understanding, Inventorying, and Evaluating a Byway's Intrinsic Qualities; National Scenic Byways Program Publication: Washington, DC, USA, 1999.
- Antrop, M.; Stobbelaar, D.J.; Mansvelt, J.D.V. Background concepts for integrated landscape analysis. Agric. Ecosyst. Environ. 2000, 77, 17–28. [Google Scholar] [CrossRef]
- Daniel, T.C. Whither scenic beauty? Visual landscape quality assessment in the 21st century. Landsc. Urban Plan. 2001, 54, 267–281. [Google Scholar] [CrossRef]
- Yin, L.; Cheng, Q.; Wang, Z.; Shao, Z. ‘Big data’ for pedestrian volume: Exploring the use of Google Street View images for pedestrian counts. Appl. Geogr. 2015, 63, 337–345. [Google Scholar] [CrossRef]
- Runge, N.; Samsonov, P.; Degraen, D.; Schoning, J. No more autobahn: Scenic route generation using Googles Street View. In Proceedings of the International Conference on Intelligent User Interfaces, Sonoma, CA, USA, 7–10 March 2016. [Google Scholar]
- Kopf, J.; Chen, B.; Szeliski, R.; Cohen, M. Street Slide: Browsing Street Level Imagery. In Proceedings of the 37th ACM SIGGRAPH Conference and Exhibition on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 26–30 July 2010. [Google Scholar]
- Hoelzl, I.; Marie, R. Google Street View: Navigating the operative image. Vis. Stud. 2014, 29, 261–271. [Google Scholar] [CrossRef]
- Torii, A.; Havlena, M. From google street view to 3d city models. In Proceedings of the IEEE International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009. [Google Scholar]
- Anguelov, D.; Dulong, C.; Filip, D.; Frueh, C.; Lafon, S.; Lyon, R.; Ogale, A.; Vincent, L.; Weaver, J. Google street view: Capturing the world at street level. Computer 2010, 43, 32–38. [Google Scholar] [CrossRef]
- Verstockt, S.; Gerke, M.; Kerle, N. Geolocalization of Crowdsourced Images for 3-D Modeling of City Points of Interest. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1670–1674. [Google Scholar] [CrossRef]
- Hara, K.; Azenkot, S.; Campbell, M.; Bennett, C.L.; Le, V.; Pannella, S.; Moore, R.; Minckler, K.; Ng, R.H.; Froehlich, J.E. Improving Public Transit Accessibility for Blind Riders by Crowdsourcing Bus Stop Landmark Locations with Google Street View. In Proceedings of the 15th International ACM SIGACCESS Conference on Computers and Accessibility, Washington, DC, USA, 21–23 October 2013. [Google Scholar]
- Olea, P.P.; Mateo-Tomás, P. Assessing species habitat using Google Street View: A case study of cliff-nesting vultures. PLoS ONE 2013, 8, e54582. [Google Scholar] [CrossRef] [PubMed]
- Rousselet, J.; Imbert, C.; Dekri, A.; Garcia, J.; Goussard, F.; Vincent, B.; Denux, O.; Robinet, C.; Dorkeld, F.; Roques, A.; et al. Assessing species distribution using Google Street View: A pilot study with the pine processionary moth. PLoS ONE 2013, 8, e74918. [Google Scholar] [CrossRef] [PubMed]
- Berland, A.; Lange, D.A. Lange Google Street View shows promise for virtual street tree surveys. Urban For. Urban Green. 2017, 21, 11–15. [Google Scholar] [CrossRef]
- Vanwolleghem, G.; Dyck, D.V.; Ducheyne, F.; Bourdeaudhuij, I.D.; Cardon, G. Assessing the environmental characteristics of cycling routes to school: A study on the reliability and validity of a Google Street View-based audit. Int. J. Health Geogr. 2014, 13, 19. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, C.; Li, W. Does the visibility of greenery increase perceived safety in urban areas? Evidence from the place pulse 1.0 dataset. ISPRS Int. J. Geo-Inf. 2015, 4, 1166–1183. [Google Scholar] [CrossRef]
- Clews, C.; Brajkovich-Payne, R.; Dwight, E.; Fauzul, A.A.; Burton, M.; Carleton, O.; Cook, J.; Deroles, C.; Faulkner, R.; Furniss, M.; et al. Alcohol in urban streetscapes: A comparison of the use of Google Street View and on-street observation. BMC Public Health 2016, 16, 442. [Google Scholar] [CrossRef] [PubMed]
- Oh, K. Visual threshold carrying capacity (VTCC) in urban landscape management: A case study of Seoul, Korea. Landsc. Urban Plan. 1998, 39, 283–294. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing street-level urban greenery using Google Street View and a modified green view index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Lynch, K. The Image of the City; MIT Press: Cambridge, MA, USA, 1960. [Google Scholar]
- Stamps, A.E.; Smith, S. Environmental enclosure in urban settings. Environ. Behav. 2002, 34, 781–794. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, L.; Mcbride, J.; Gong, P. Can you see green? Assessing the visibility of urban forests in cities. Landsc. Urban Plan. 2009, 91, 97–104. [Google Scholar] [CrossRef]
- Ayad, Y.M. Remote Sensing and GIS in Modeling Visual Landscape Change: A Case Study of the Northwestern Arid Coast of Egypt. Landsc. Urban Plan. 2005, 73, 307–325. [Google Scholar] [CrossRef]
- Zhang, L.; Gu, Z.; Li, H. Sdsp: A Novel Saliency Detection Method by Combining Simple Priors. In Proceedings of the IEEE International Conference on Image Processing, Melbourne, Australia, 15–18 September 2013. [Google Scholar]
- Shen, X.; Wu, Y. A Unified Approach to Salient Object Detection via Low Rank Matrix Recovery. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Judd, T.; Ehinger, K.; Durand, F.; Torralba, A. Learning to Predict Where Humans Look. In Proceedings of the IEEE International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Fan, G.L.; Zhou, L. Visual Entropy-Based Classified Bath Fractal Transform for Image Coding. In Proceedings of the IEEE International Conference on Signal Processing, Beijing, China, 18 October 1996. [Google Scholar]
- Ye, Q.X.; Gao, W.; Wang, W.Q.; Huang, T.J. A Color Image Segmentation Algorithm by Using Color and Spatial Information. J. Softw. 2004, 15, 522–530. (In Chinese) [Google Scholar]
- Bain, L.; Gray, B.; Rodgers, D. Living Streets: Strategies for Crafting Public Space; John Wiley and Sons: New York, NY, USA, 2012. [Google Scholar]
- Camacho-Cervantes, M.; Schondube, J.E.; Castillo, A.; MacGregor-Fors, L. How Do People Perceive Urban Trees? Assessing Likes and Dislikes in Relation to the Trees of a City. Urban Ecosyst. 2014, 17, 761–773. [Google Scholar] [CrossRef]
- Garré, S.; Meeus, S.; Gulinck, H. The dual role of roads in the visual landscape: A case-study in the area around Mechelen (Belgium). Landsc. Urban Plan. 2009, 92, 125–135. [Google Scholar] [CrossRef]
- Yin, L.; Wang, Z. Measuring visual enclosure for street walkability: Using machine learning algorithms and Google Street View imagery. Appl. Geogr. 2016, 76, 147–153. [Google Scholar] [CrossRef]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, L.; Chu, S.; Zong, W.; Li, S.; Wu, J.; Li, M. Use of Tencent Street View Imagery for Visual Perception of Streets. ISPRS Int. J. Geo-Inf. 2017, 6, 265. https://doi.org/10.3390/ijgi6090265
Cheng L, Chu S, Zong W, Li S, Wu J, Li M. Use of Tencent Street View Imagery for Visual Perception of Streets. ISPRS International Journal of Geo-Information. 2017; 6(9):265. https://doi.org/10.3390/ijgi6090265
Chicago/Turabian StyleCheng, Liang, Sensen Chu, Wenwen Zong, Shuyi Li, Jie Wu, and Manchun Li. 2017. "Use of Tencent Street View Imagery for Visual Perception of Streets" ISPRS International Journal of Geo-Information 6, no. 9: 265. https://doi.org/10.3390/ijgi6090265
APA StyleCheng, L., Chu, S., Zong, W., Li, S., Wu, J., & Li, M. (2017). Use of Tencent Street View Imagery for Visual Perception of Streets. ISPRS International Journal of Geo-Information, 6(9), 265. https://doi.org/10.3390/ijgi6090265