
Extraction of Terraces on the Loess Plateau from High-Resolution DEMs and Imagery Utilizing Object-Based Image Analysis


 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Data Sets and Methods
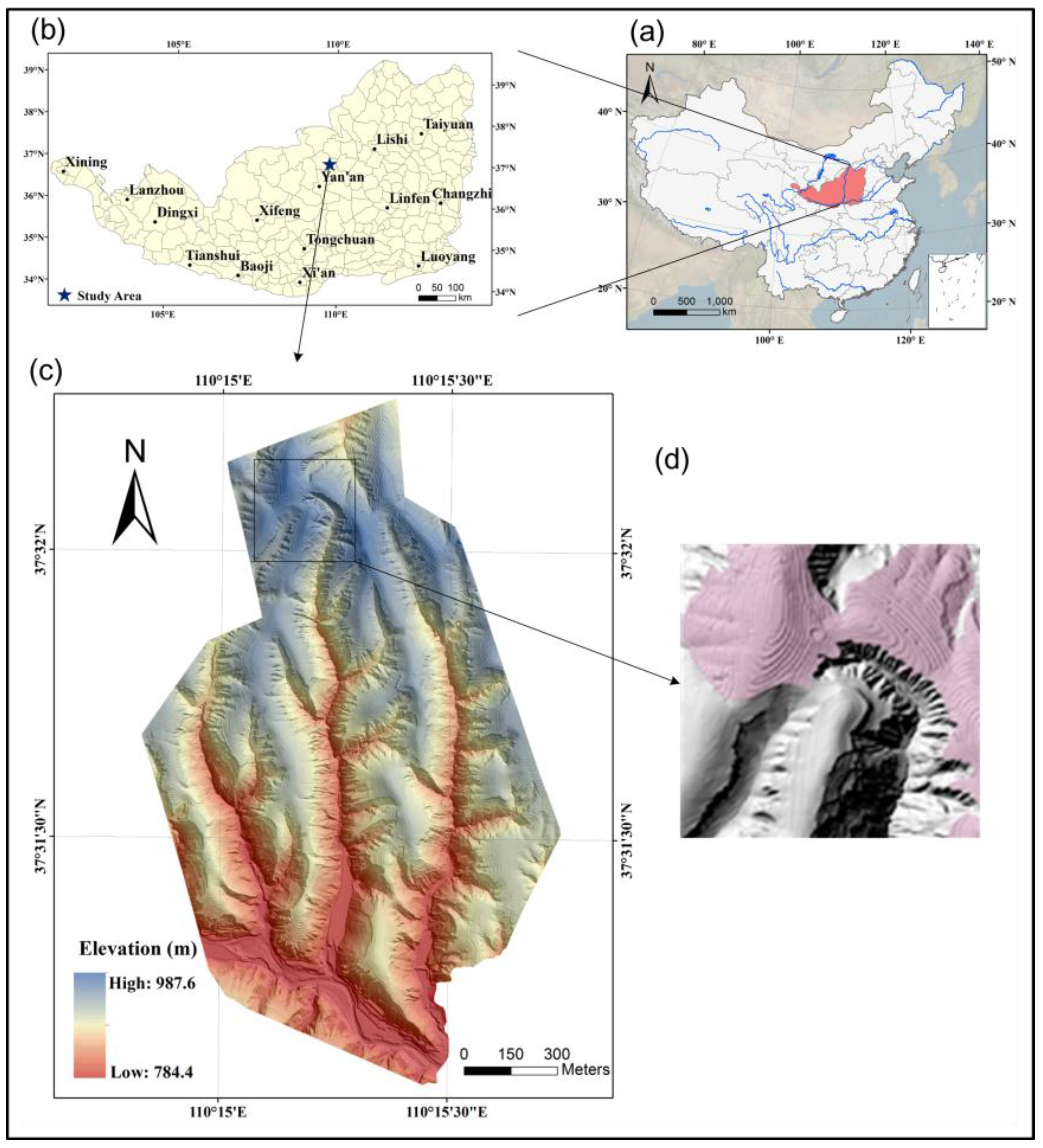
2.1. Study Area
2.2. Data Acquisition
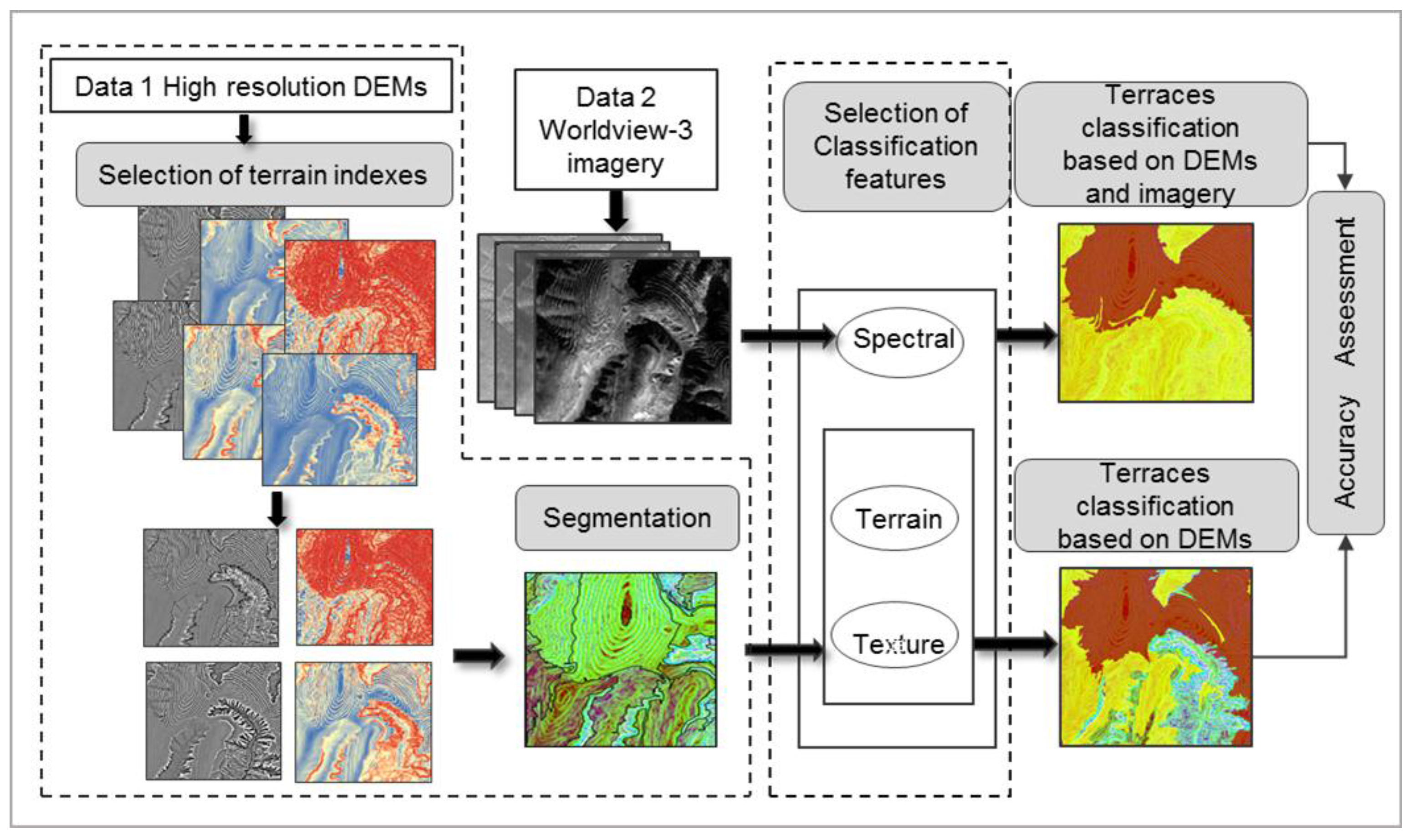
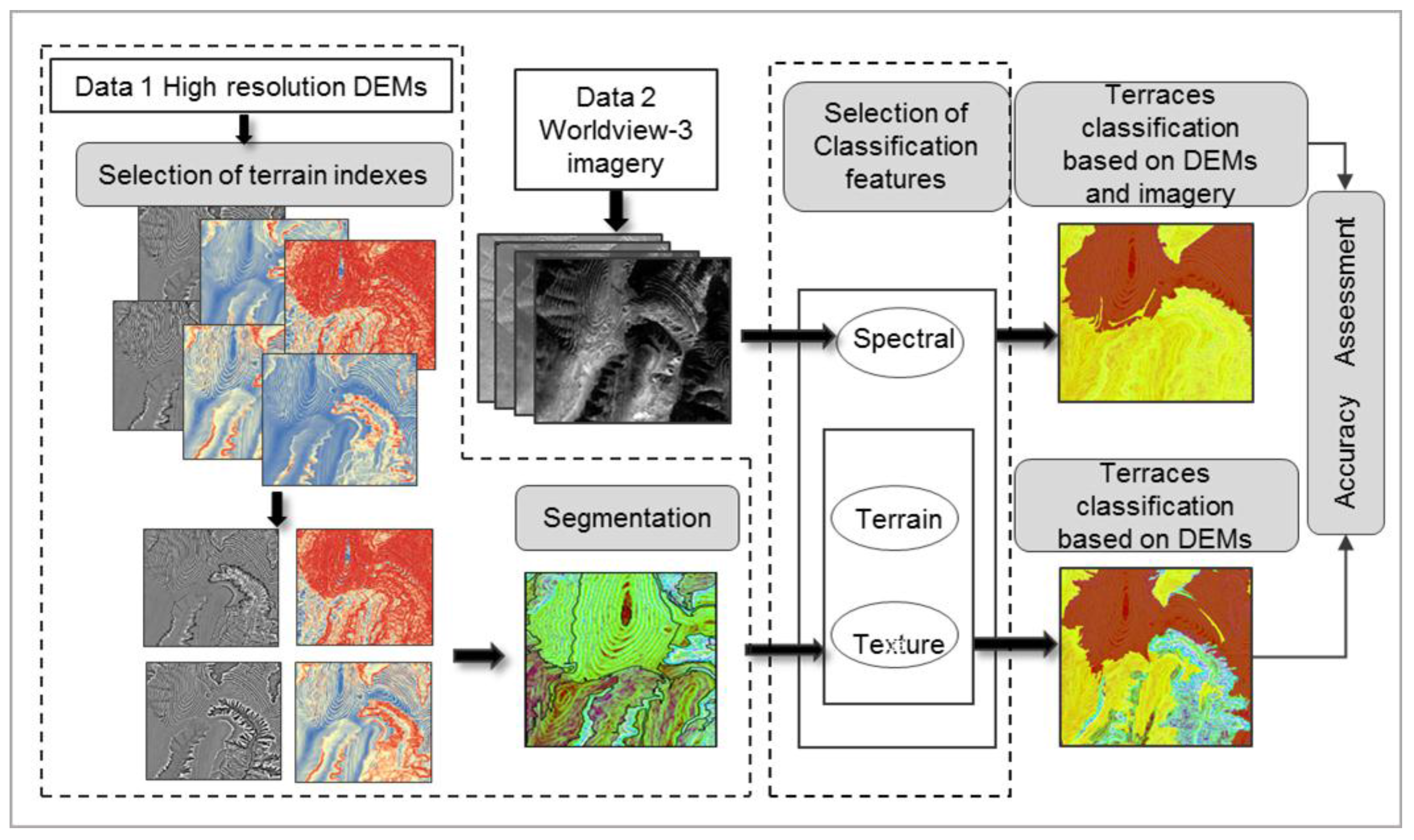
2.3. Overview of Extraction
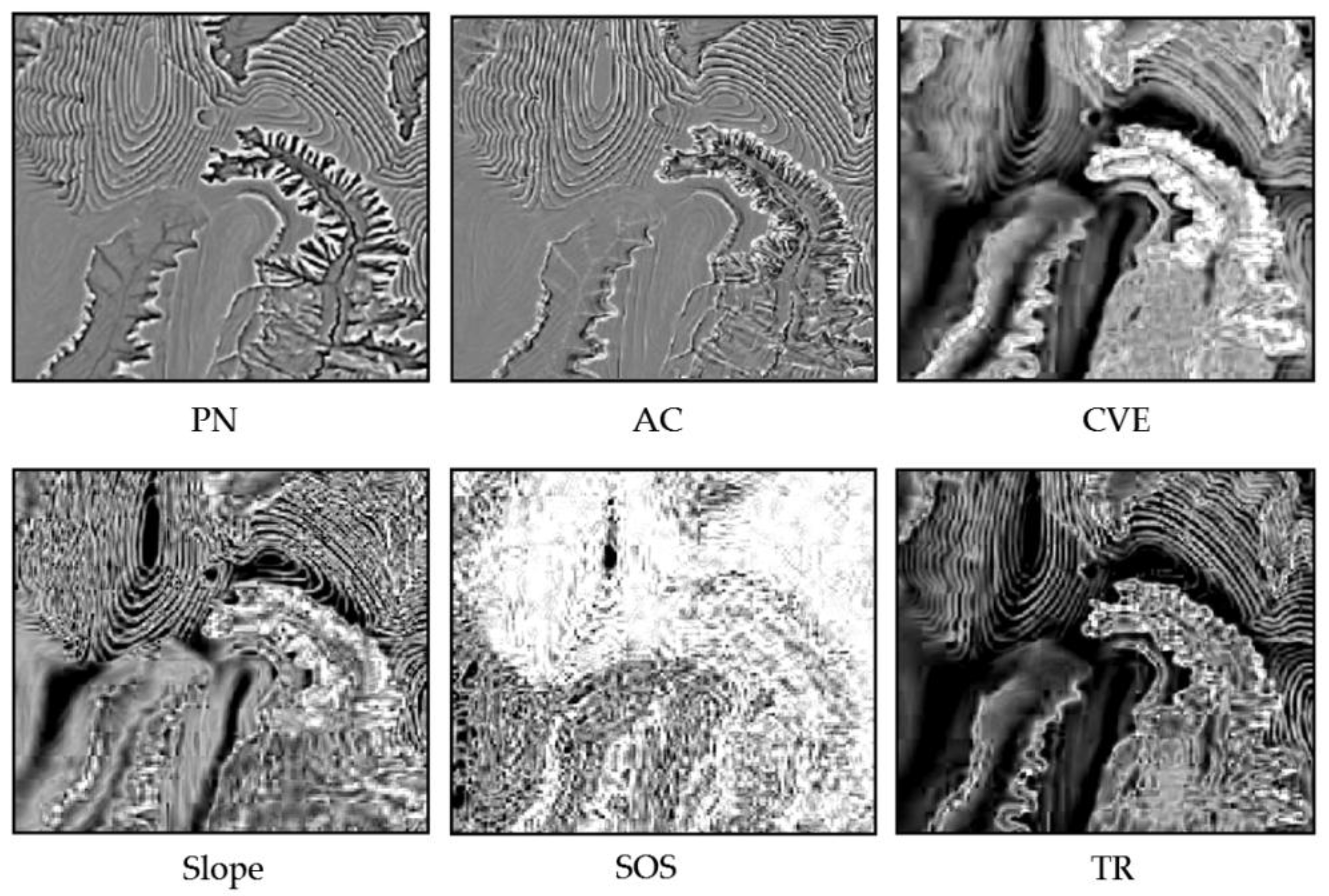
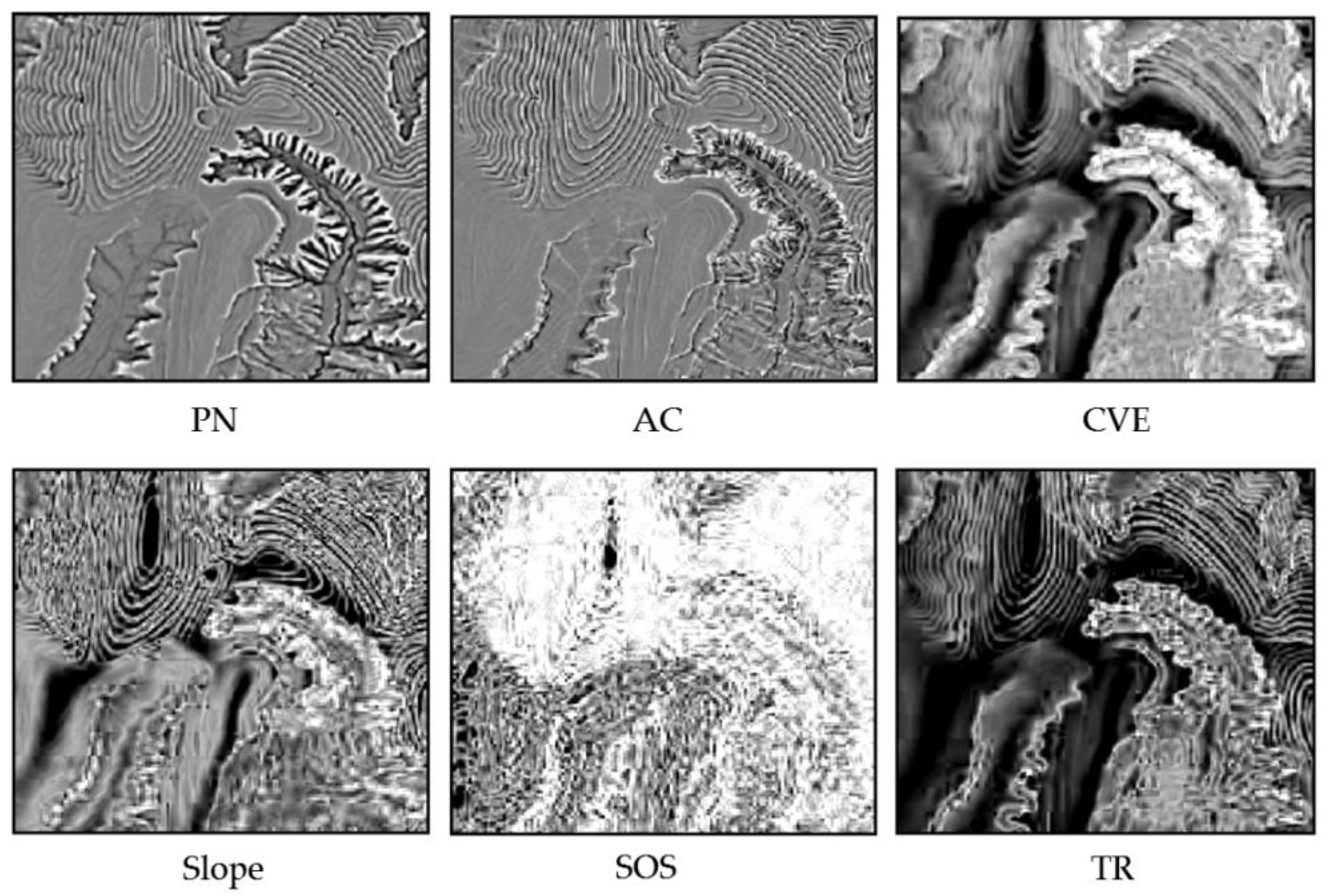
2.4. Selection of Terrain Indexes
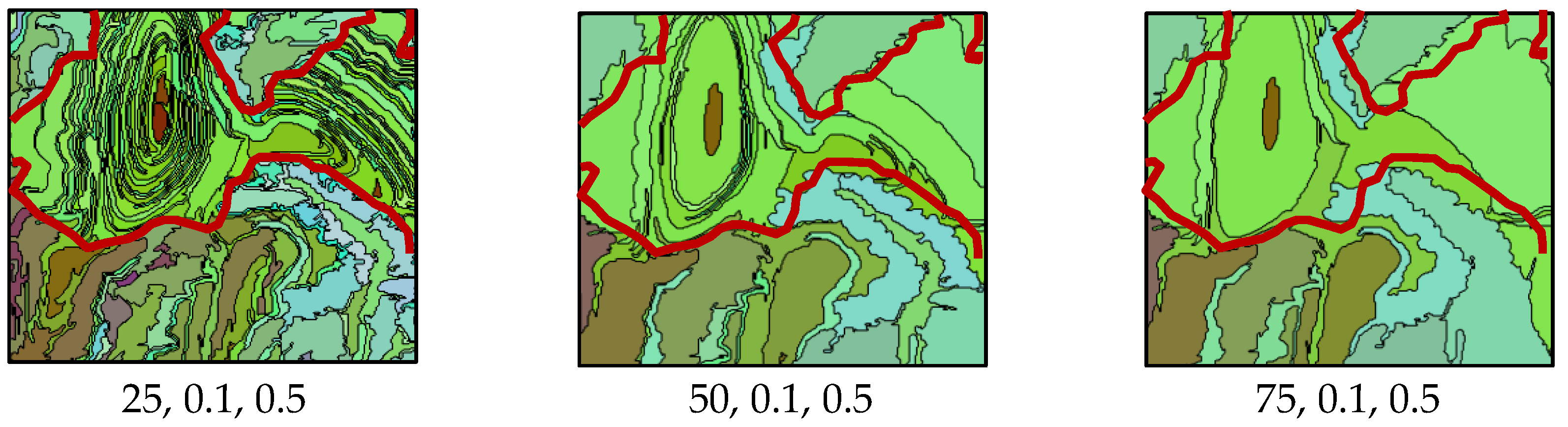
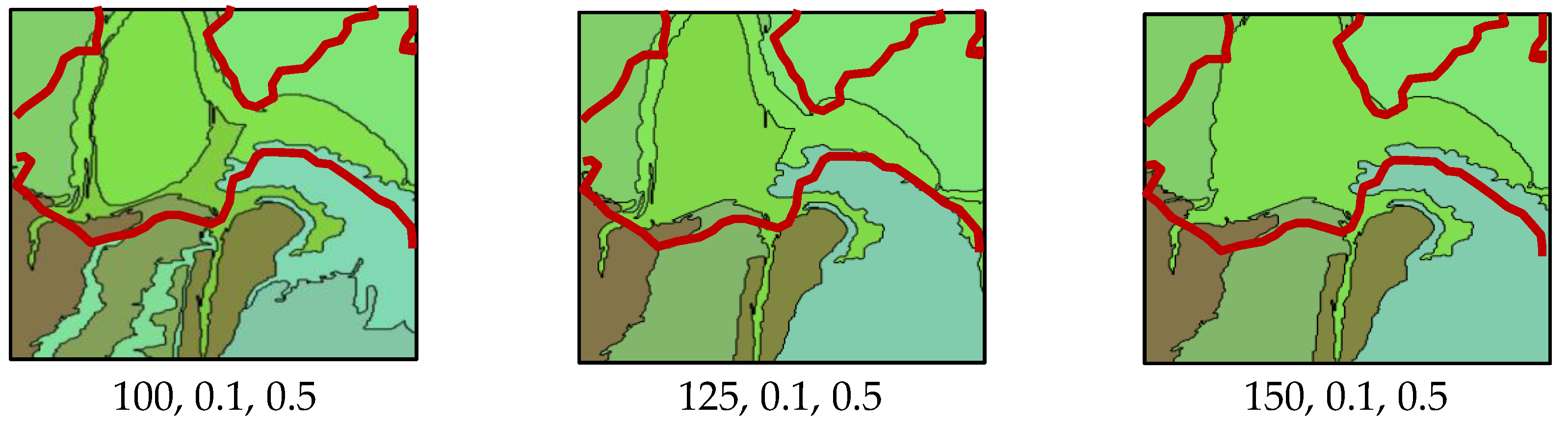
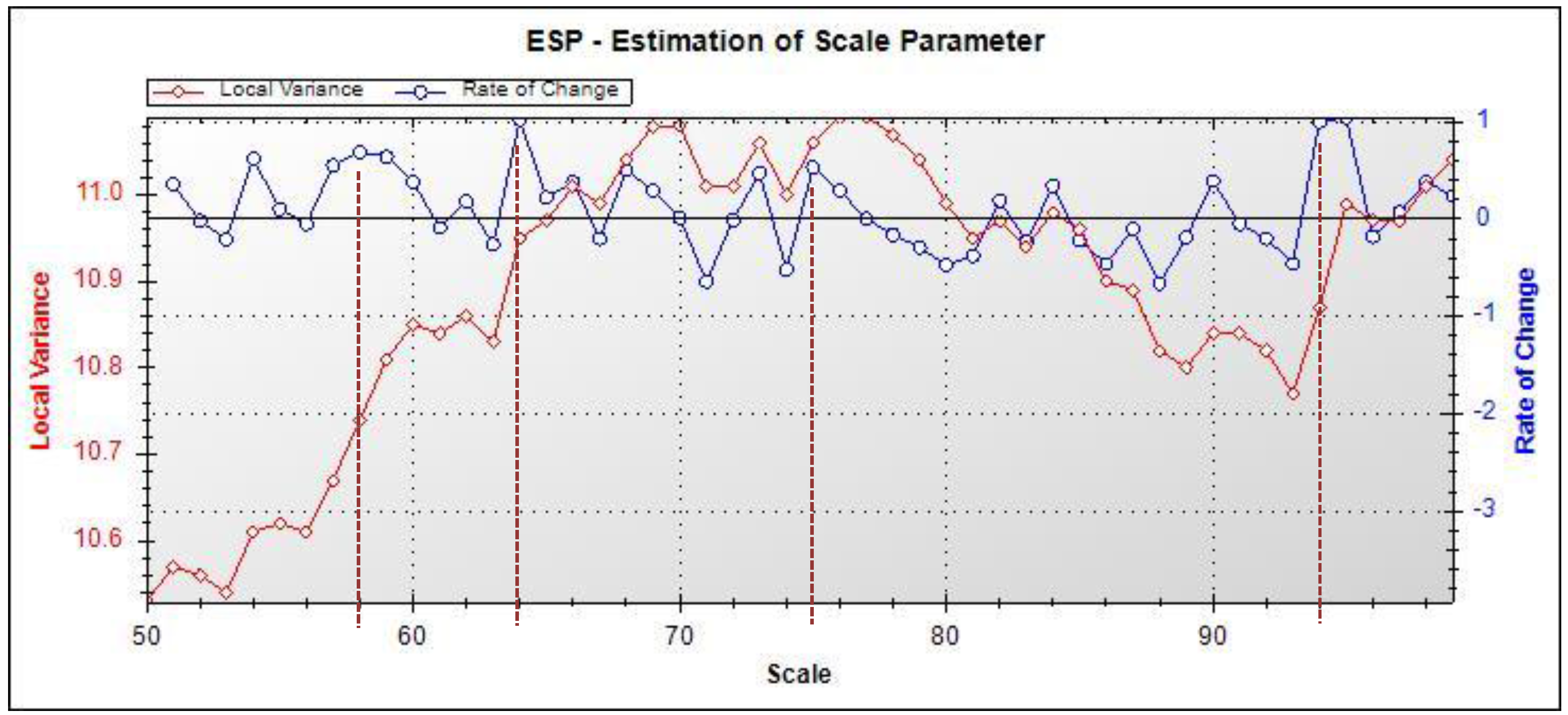
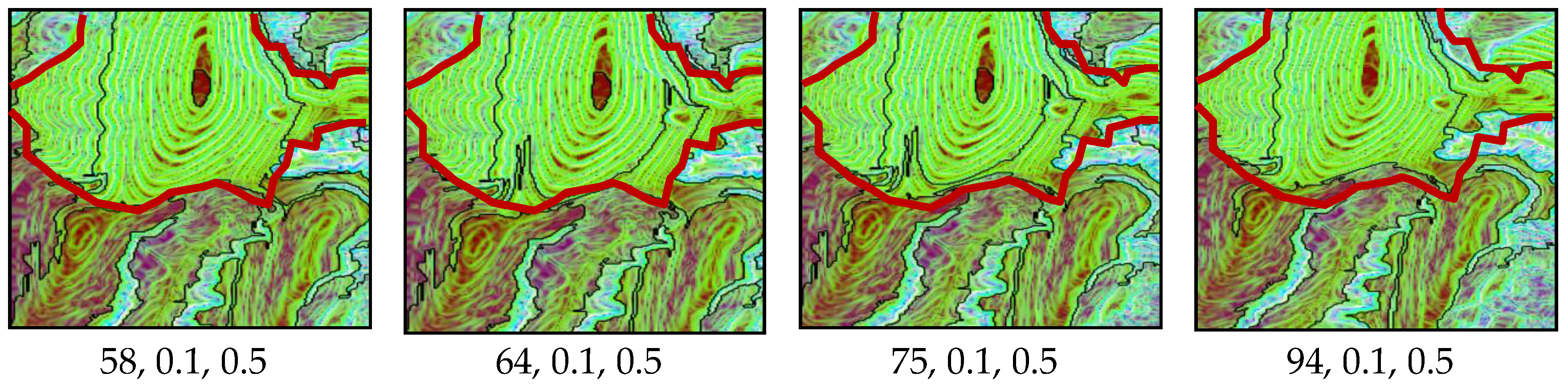
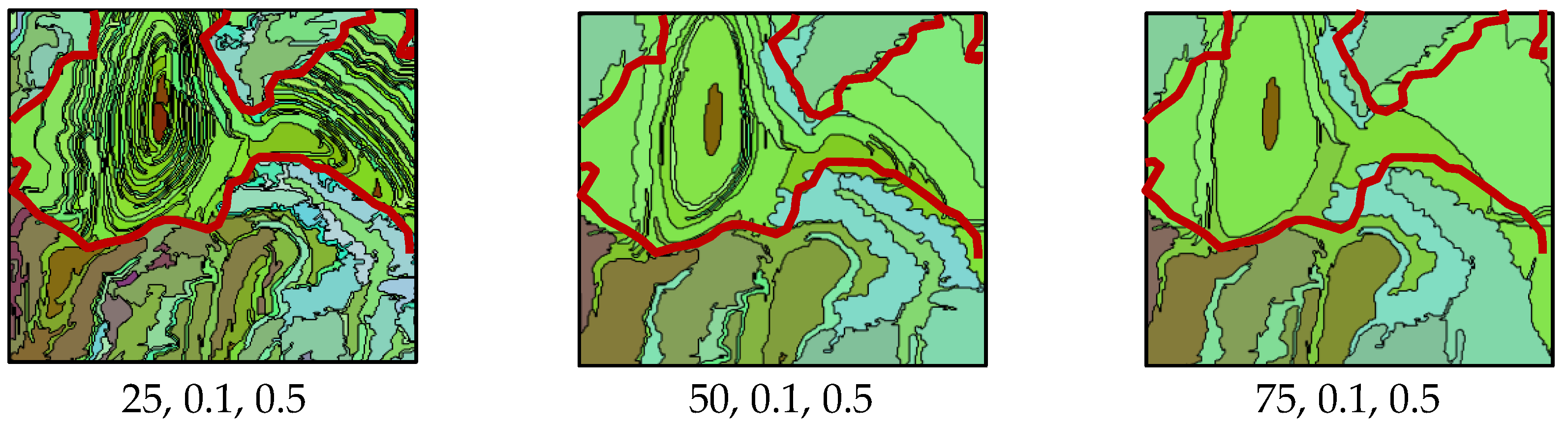
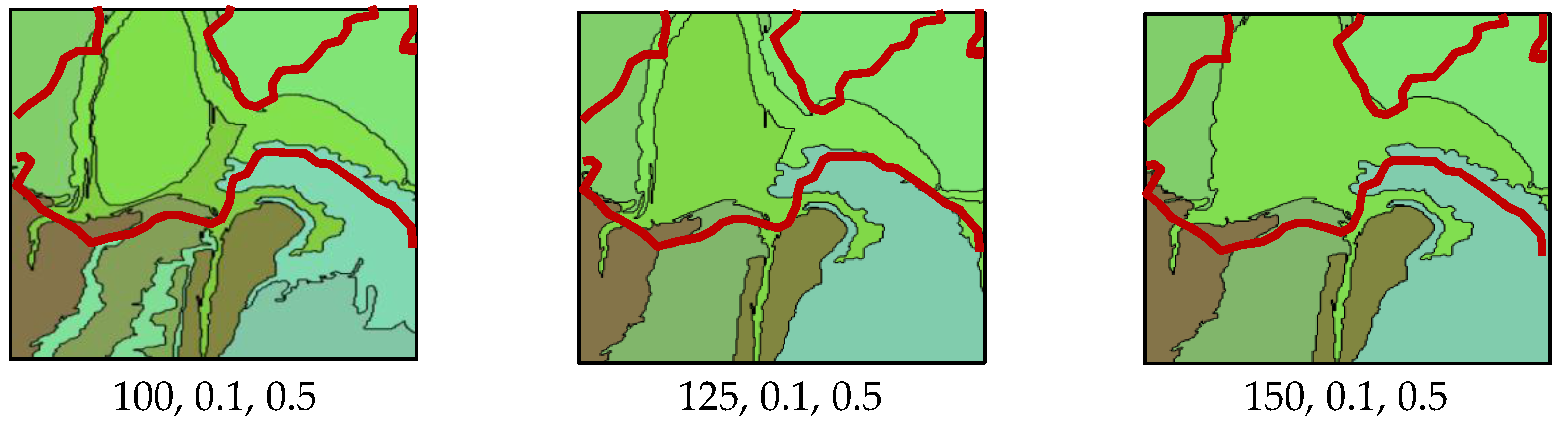
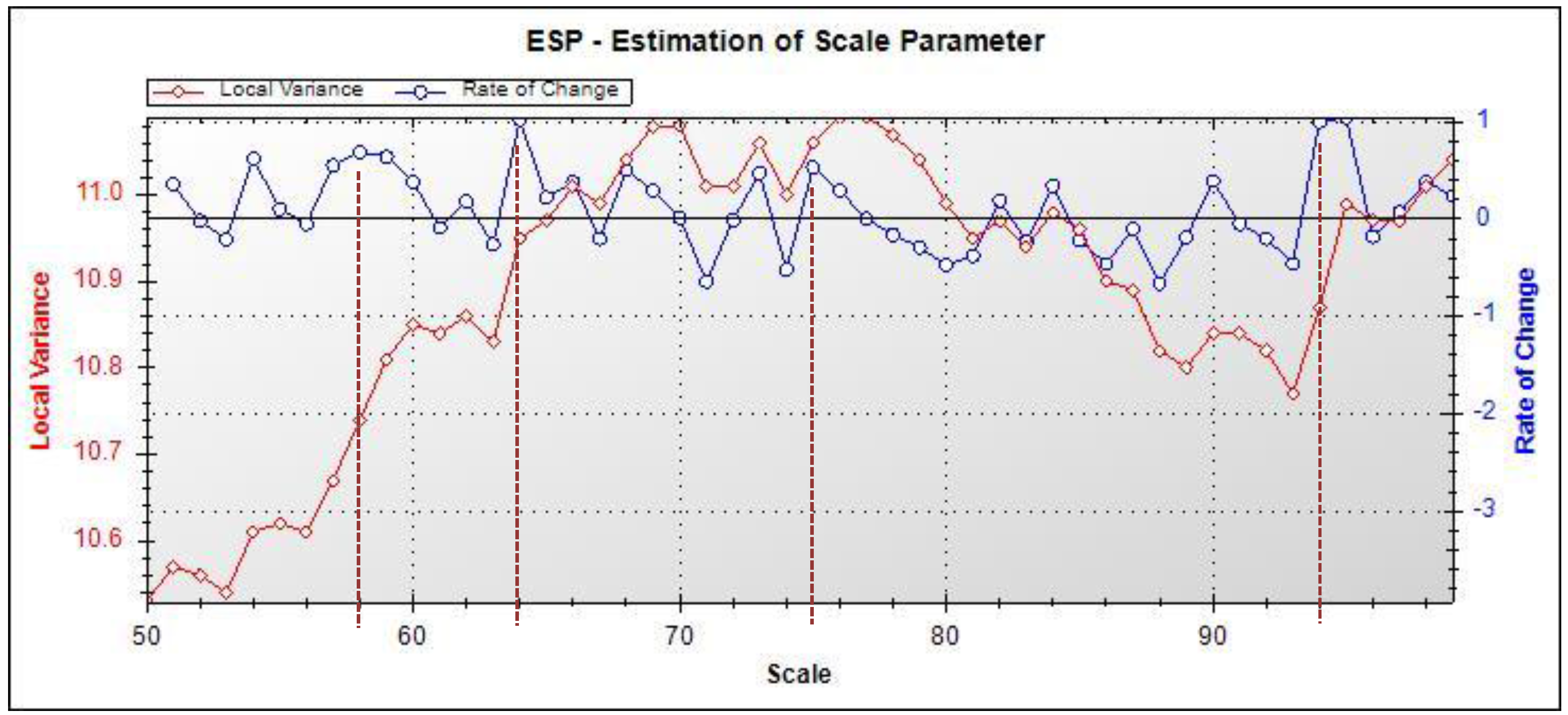
2.5. Segmentation
2.6. Classification
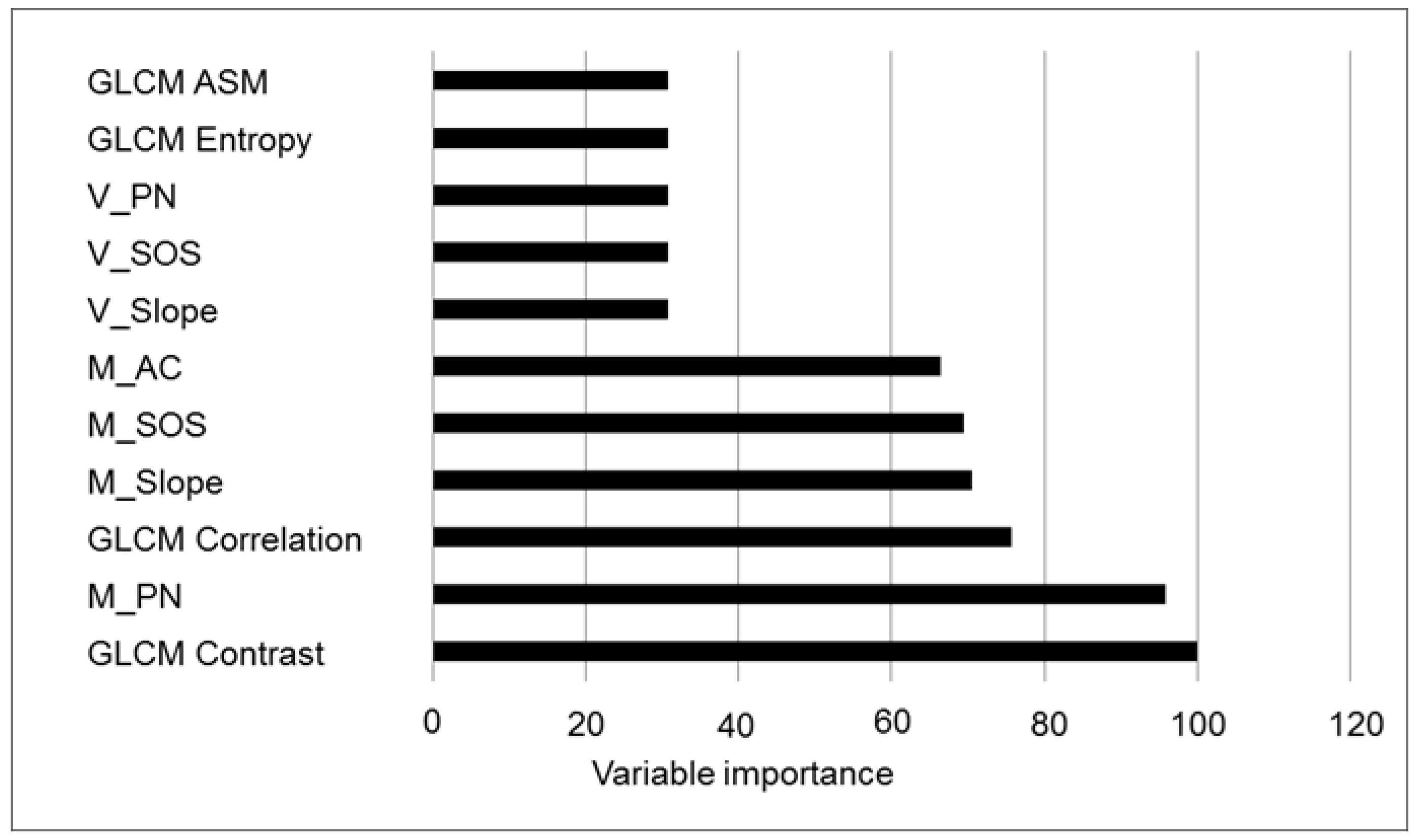
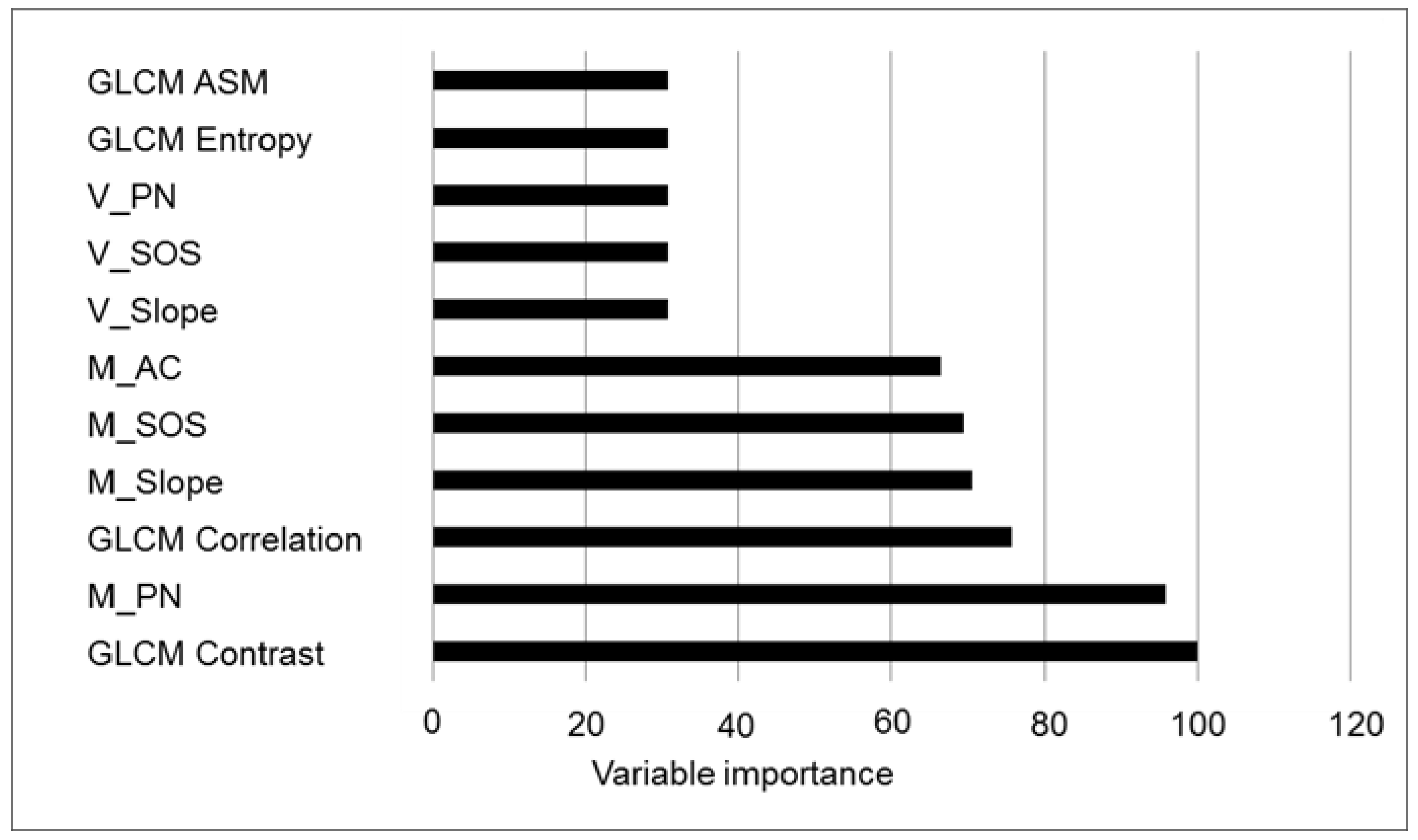
2.6.1. Selection and Calculation of Classification Features
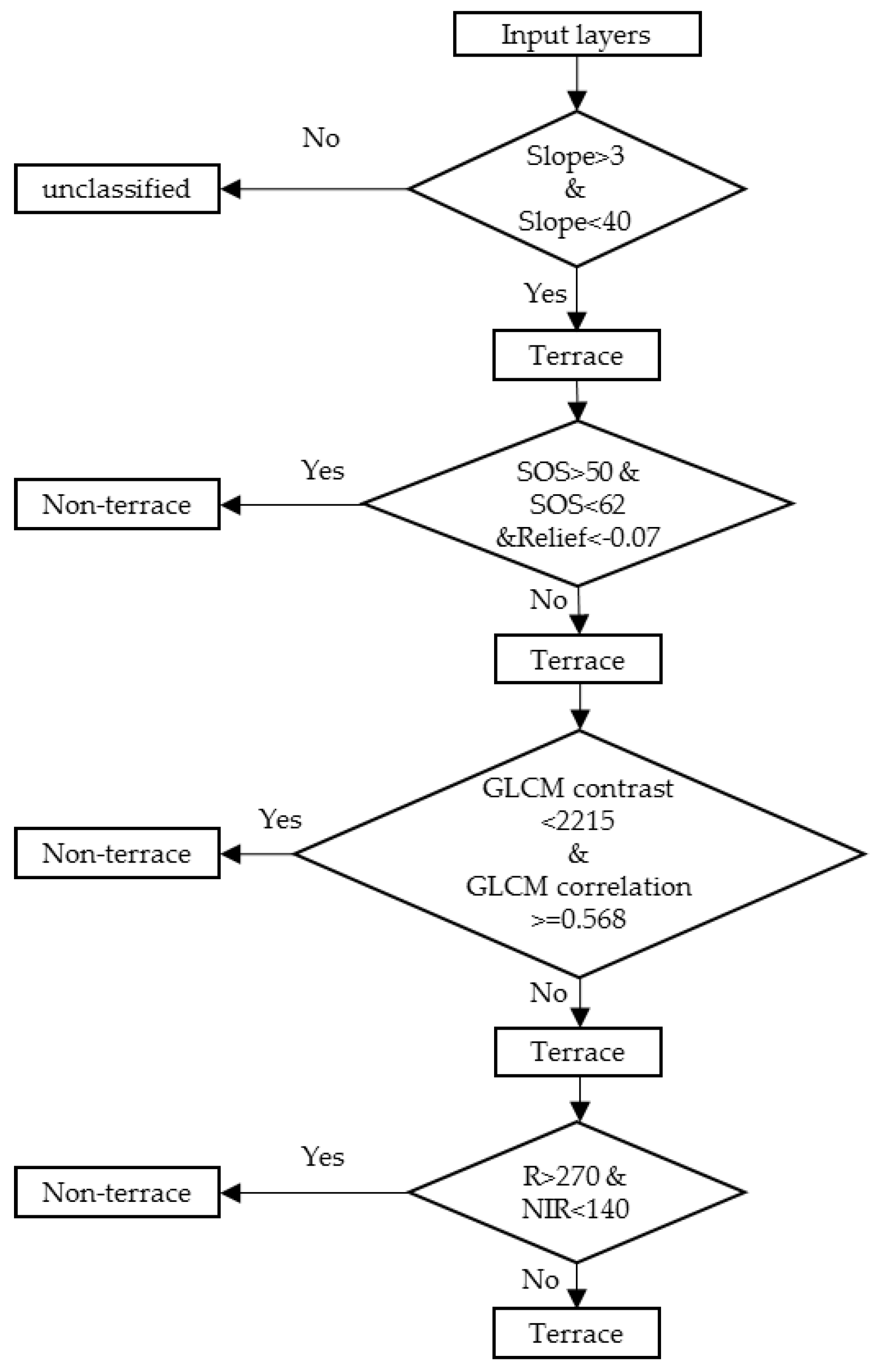
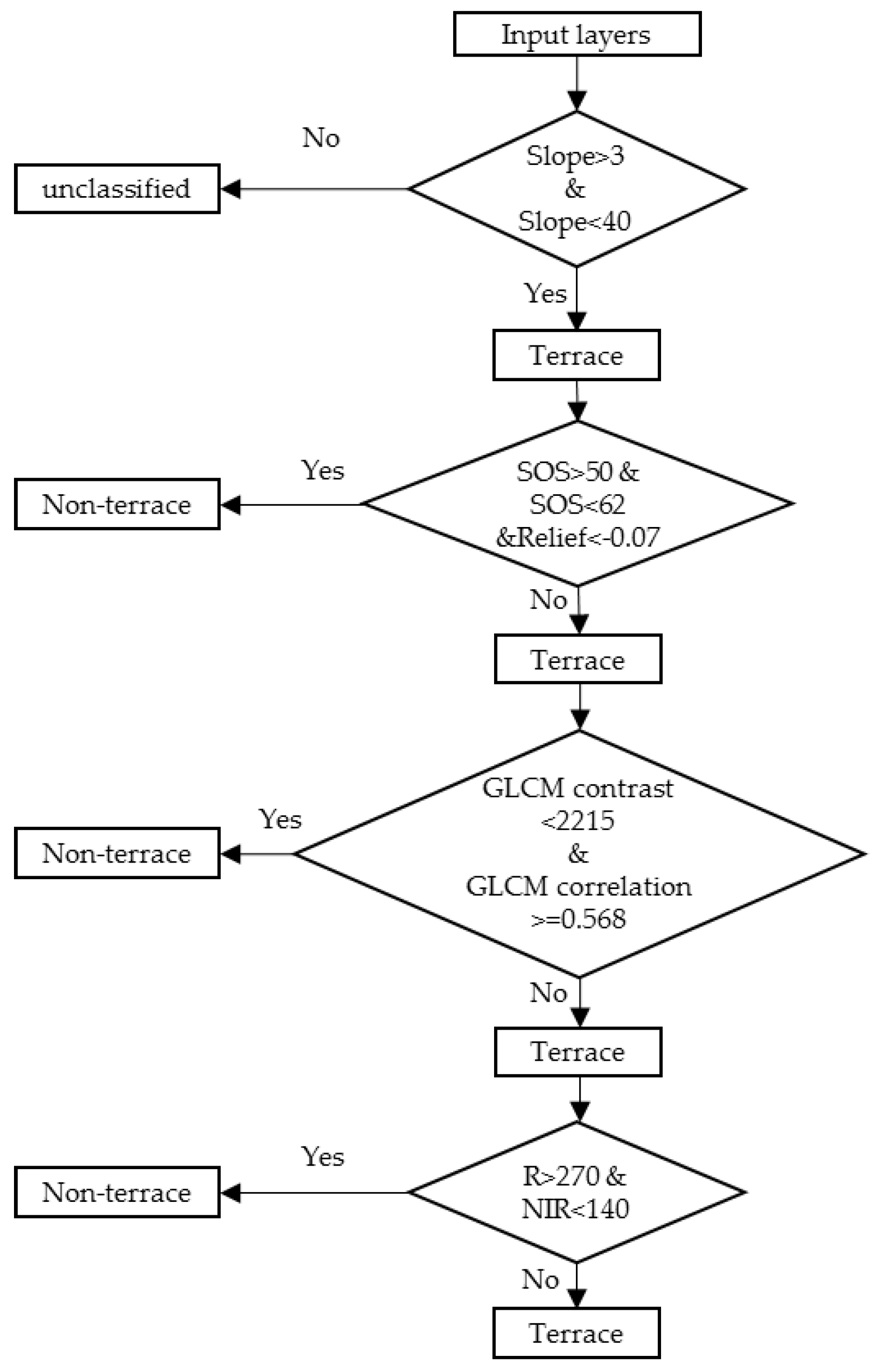
2.6.2. Classification Rules and Validation
3. Results
3.1. Results of Terrain Indexes Selection
3.2. Characteristics of Produced Segmentation
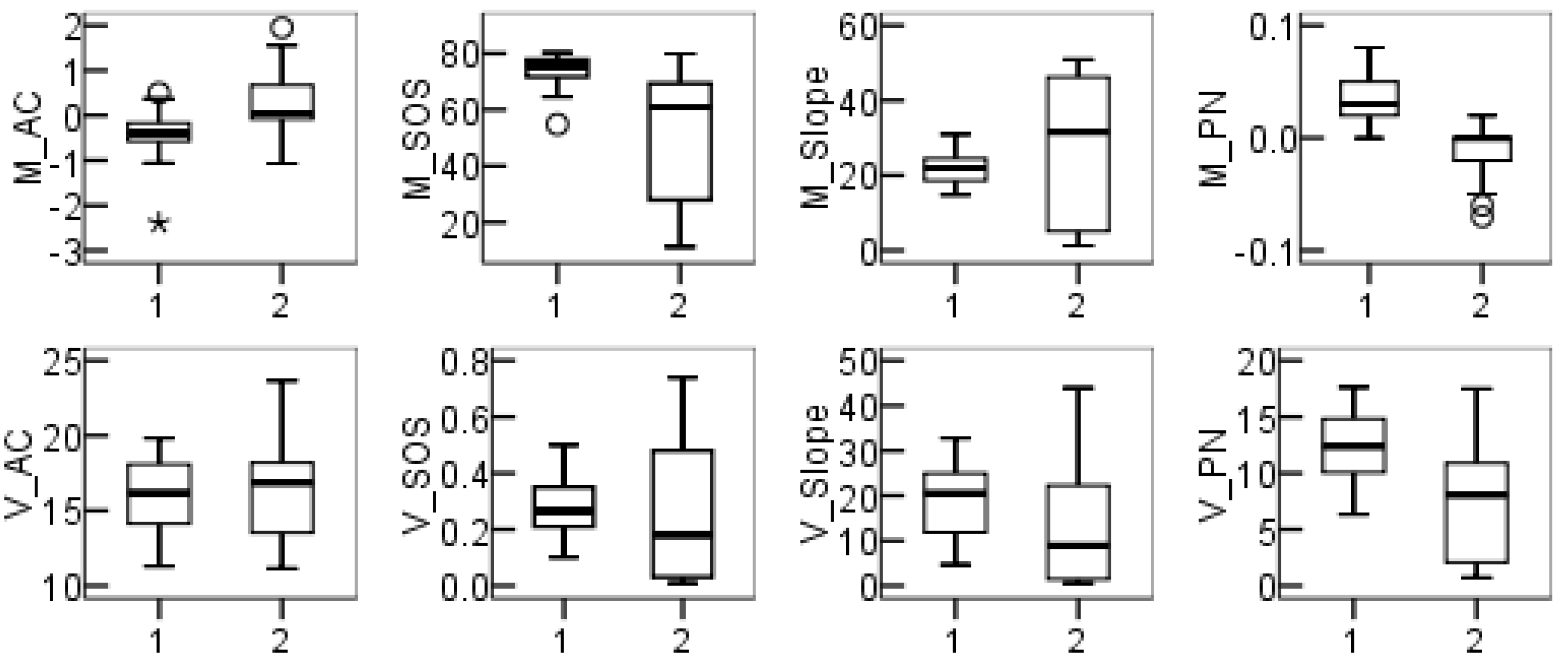
3.3. Characteristics of Topographic Classification Features
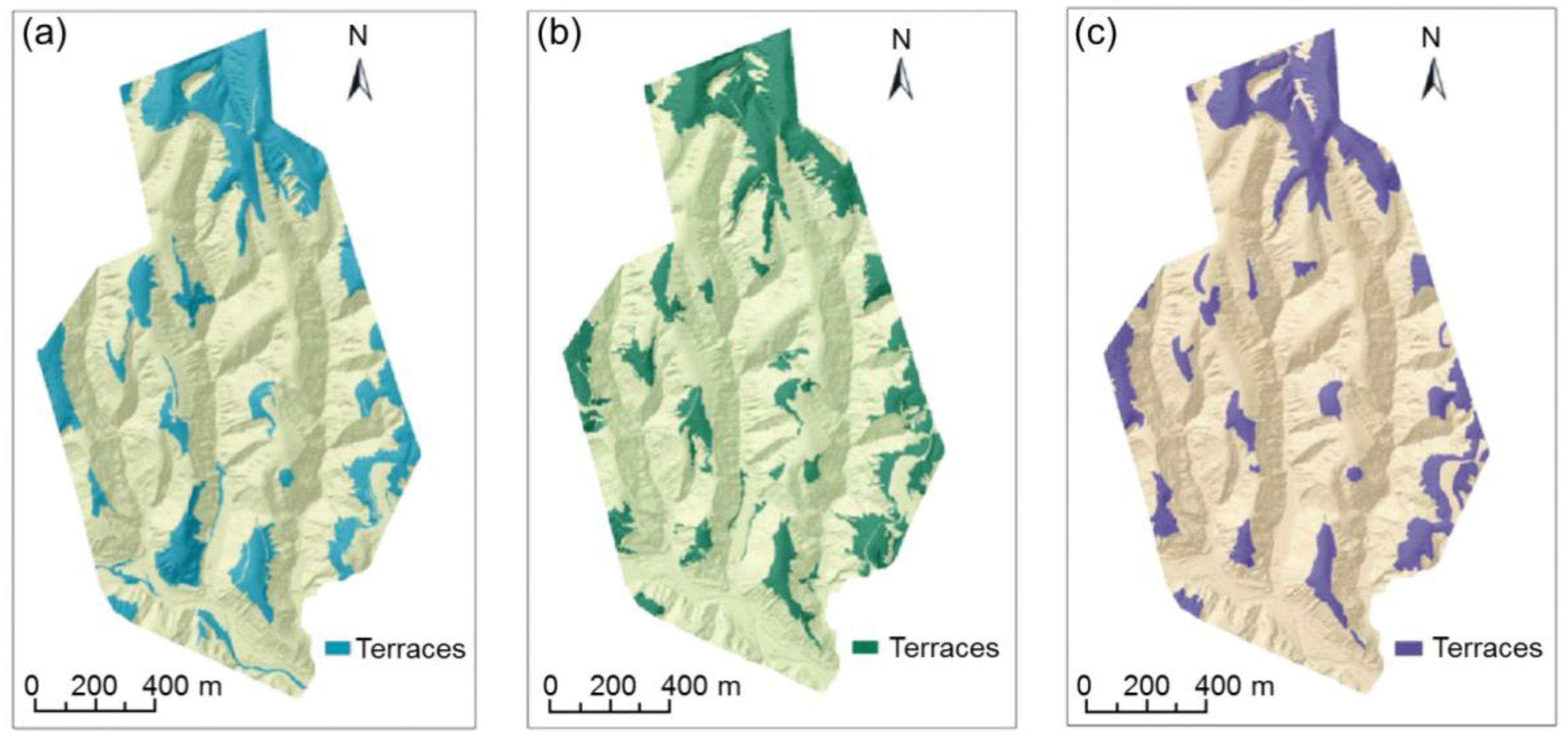
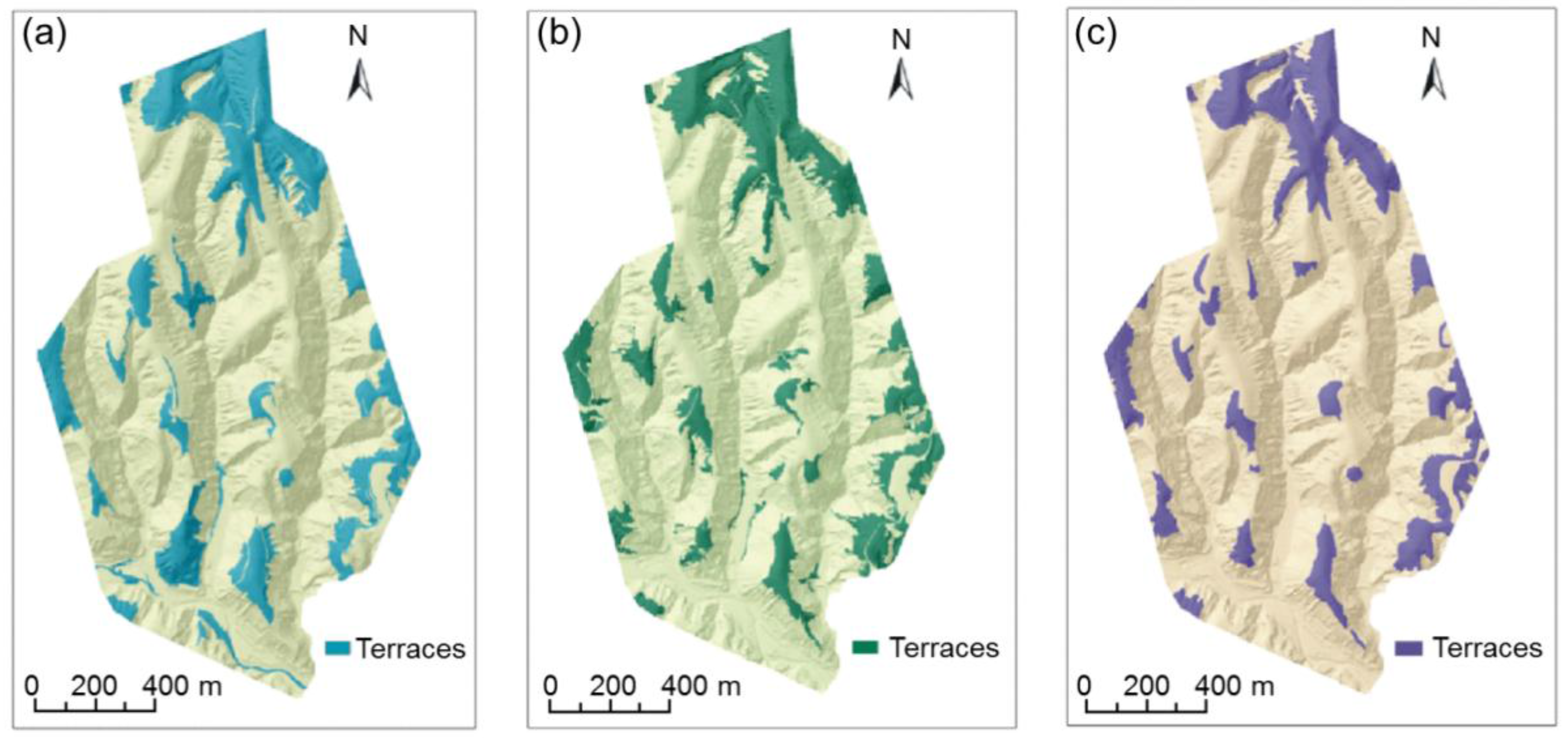
3.4. Characteristics of Two Classifications
3.4.1. DEM-Based Classification
3.4.2. Dem and Image-Based Classification
4. Discussion
4.1. Rationality of the Proposed Method
4.2. Application of the Proposed Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ritsema, C.J. Introduction: Soil erosion and participatory land use planning on the Loess Plateau in China. Catena 2003, 54, 1–5. [Google Scholar] [CrossRef]
- Jiao, J.Y.; Wang, W.Z. Quality and soil water conservation effectiveness of level terrace on the Loess Plateau. Trans. Chin. Soc. Agric. Eng. 1999, 15, 59–63. [Google Scholar]
- Rey Benayas, J.M.; Martins, A.; Nicolau, J.M.; Schulz, J.J. Abandonment of agricultural land: An overview of drivers and consequences. CAB Rev. Perspect. Agric. Vet. Sci. Nutr. Nat. Resour. 2007, 2, 1–14. [Google Scholar] [CrossRef]
- Arnáez, J.; Lana-Renault, N.; Lasanta, T.; Ruiz-Flañoa, P.; Castroviejoa, J. Effects of farming terraces on hydrological and geomorphological processes. A review. Catena 2015, 128, 122–134. [Google Scholar] [CrossRef]
- Strehmel, A.; Jewett, A.; Schuldt, R.; Schmalz, B.; Fohrer, N. Field data-based implementation of land management and terraces on the catchment scale for an eco-hydrological modelling approach in the Three Gorges Region, China. Agric. Water Manag. 2015, 175, 43–60. [Google Scholar] [CrossRef]
- Shi, Z.H.; Ai, L.; Fang, N.F.; Zhu, H.D. Modeling the impacts of integrated small watershed management on soil erosion and sediment delivery: A case study in the Three Gorges Area, China. J. Hydrol. 2012, 438, 156–167. [Google Scholar] [CrossRef]
- Arabi, M.; Frankenberger, J.A.; Engel, B.A.; Arnold, J.G. Representation of agricultural conservation practices with SWAT. Hydrol. Process. 2008, 22, 3042–3055. [Google Scholar] [CrossRef]
- Shao, H.; Baffaut, C.; Gao, J.E.; Nelson, N.O.; Janssen, K.A.; Pierzynski, G.M.; Barnes, P.L. Development and application of algorithms for simulating terraces within SWAT. Trans. ASABE 2013, 56, 1715–1730. [Google Scholar]
- Lu, H.S.; Zhu, Y.H.; Skaggs, T.H.; Yu, Z.B. Comparison of measured and simulated water storage in dryland terraces of the Loess Plateau, China. Agric. Water Manag. 2009, 96, 299–306. [Google Scholar] [CrossRef]
- Liu, X.; He, B.; Yi, X.; Zhang, L.; Han, F. The soil water dynamics and hydraulic processes of crops with plastic film mulching in terraced dryland fields on the Loess Plateau. Environ. Earth Sci. 2016, 75, 1–16. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, B.; Tang, Q.; Liu, G.; Liu, P. Analysis of comprehensive benefits of transforming slope farmland to terraces on the Loess Plateau: A case study of the Yangou Watershed in Northern Shaanxi Province, China. J. Mt. Sci. 2011, 8, 448–457. [Google Scholar] [CrossRef]
- Martínez-Casasnovas, J.A.; Ramos, M.C.; Cots-Folch, R. Influence of the EU CAP on terrain morphology and vineyard cultivation in the Priorat region of NE Spain. Land Use Policy 2010, 27, 11–21. [Google Scholar] [CrossRef]
- Dunjó, G.; Pardini, G.; Gispert, M. Land use change effects on abandoned terraced soils in a Mediterranean catchment, NE Spain. Catena 2003, 52, 23–37. [Google Scholar] [CrossRef]
- Agnoletti, M.; Cargnello, G.; Gardin, L.; Santoro, A.; Bazzoffi, P.; Sansone, L.; Pezza, L.; Belfiore, N. Traditional landscape and rural development: Comparative study in three terraced areas in northern, central and southern Italy to evaluate the efficacy of GAEC standard 4.4 of cross compliance. Ital. J. Agron. 2011, 6, 121–139. [Google Scholar] [CrossRef]
- Zhao, B.Y.; Ma, N.; Yang, J.; Li, Z.H.; Wang, Q.X. Extracting features of soil and water conservation measures from remote sensing images of different resolution levels: Accuracy analysis. Bull. Soil Water Conserv. 2012, 32, 154–157. [Google Scholar]
- Li, Y.; Gong, J.; Wang, D.; An, L.; Li, R. Sloping farmland identification using hierarchical classification in the Xi-He region of China. Int. J. Remote Sens. 2013, 34, 545–562. [Google Scholar] [CrossRef]
- Diaz-Varela, R.A.; Zarco-Tejada, P.J.; Angileri, V.; Loudjani, P. Automatic identification of agricultural terraces through object-oriented analysis of very high resolution DSMs and multispectral imagery obtained from an unmanned aerial vehicle. J. Environ. Manag. 2014, 134, 117–126. [Google Scholar] [CrossRef] [PubMed]
- Bailly, J.S.; Levavasseur, F. Potential of linear features detection in a Mediterranean landscape from 3D VHR optical data: Application to terrace walls. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2012), Munich, Germany, 22–27 July 2012. [Google Scholar]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. Z. Geoinformationssysteme 2001, 14, 12–17. [Google Scholar]
- Frohn, R.C.; Autrey, B.C.; Lane, C.R.; Reif, M. Segmentation and object-oriented classification of wetlands in a karst Florida landscape using multi-season Landsat-7 ETM+ imagery. Int. J. Remote Sens. 2007, 32, 1471–1489. [Google Scholar] [CrossRef]
- Hay, G.J.; Castilla, G. Object-based image analysis: Strengths, weaknesses, opportunities and threats (SWOT). In Proceedings of the 1st International Conference on Object-based Image Analysis (OBIA 2006), Salzburg, Austria, 4–5 July 2006. [Google Scholar]
- Chen, G.; Hay, G.J.; Castilla, G.; St-Onge, B.; Powers, R. A multiscale geographic object-based image analysis to estimate lidar-measured forest canopy height using Quickbird imagery. Int. J. Geogr. Inf. Sci. 2011, 25, 877–893. [Google Scholar] [CrossRef]
- Malinverni, E.S.; Tassetti, A.N.; Mancini, A.; Zingaretti, P.; Frontoni, E.; Bernardini, A. Hybrid object-based approach for land use/land cover mapping using high spatial resolution imagery. Int. J. Geogr. Sci. 2011, 25, 1025–1043. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.; Na, J.; Huang, X.; Xue, Z.; Yang, X.; Li, F. Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. ISPRS Int. J. Geo-Inf. 2016, 5, 238. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Kux, H.J.; Souza, U.D. Object-based image analysis of WORLDVIEW-2 satellite data for the classification of mangrove areas in the city of São Luís, Maranhão State, Brazil. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-4, 95–100. [Google Scholar]
- Zhou, Y.; Tang, G.A.; Yang, X.; Xiao, C.; Zhang, Y.; Luo, M. Positive and negative terrains on northern Shaanxi Loess Plateau. J. Geogr. Sci. 2010, 20, 64–76. [Google Scholar] [CrossRef]
- Tang, G.A. Progress of DEM and digital terrain analysis in China. Acta Geogr. Sin. 2014, 69, 1305–1325. [Google Scholar]
- Sheffield, C. Selecting band combinations from multispectral data. Photogramm. Eng. Remote Sens. 1985, 51, 681–687. [Google Scholar]
- Chang, Z.Y.; Wang, J.; Bai, S.B.; Zhang, Z.G. Auto-classification of landform in three gorges region based on SRTM DEM. Resour. Environ. Yangtze Basin 2014, 23, 1665. [Google Scholar]
- Drăguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Singh, M.; Evans, D.; Tan, B.S.; Nin, C.S. Correction: Mapping and Characterizing Selected Canopy Tree Species at the Angkor World Heritage Site in Cambodia Using Aerial Data. PLoS ONE 2016, 11, e0154548. [Google Scholar] [CrossRef] [PubMed]
- Ruan, R.; Ustin, S. Mapping of freshwater lake wetlands using object-relations and rule-based inference. Chin. Geogr. Sci. 2012, 22, 462–471. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. Angew. Geogr. informationsverarbeitung XII 2000, 58, 12–23. [Google Scholar]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, A.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Drăguţ, L.; Eisank, C.; Strasser, T. Local variance for multi-scale analysis in geomorphometry. Geomorphology 2011, 130, 162. [Google Scholar] [CrossRef] [PubMed]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textual Features for Image Classification. JEEE Trans. Syst. Man Cybern. SMC 1973, 3, 610–617. [Google Scholar] [CrossRef]
- Steinberg, D.; Cardell, N.S. The hybrid CART-Logit model in classification and data mining. Presented at the Joint Statistical Meeting of the American Statistical Association, Dallas, TX, USA, August 1998. [Google Scholar]
- Morsy, S.; Shaker, A.; El-Rabbany, A.; LaRocque, P.E. Airborne multispectral lidar data for land-cover classification and land/water mapping using different spectral indexes. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 217–224. [Google Scholar] [CrossRef]
- Loh, W.Y. Classification and regression trees. WIREs Data Min. Knowl. Discov. 2011, 1, 14–23. [Google Scholar]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Yu, B.; Shu, S.; Liu, H.; Song, W.; Wu, J.; Wang, L.; Chen, Z. Object-based spatial cluster analysis of urban landscape pattern using nighttime light satellite images: A case study of China. Int. J. Geogr. Inf. Sci. 2014, 28, 2328–2355. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Vassilopoulou, S.; Hurni, L.; Dietrich, V.; Baltsavias, E.; Pateraki, M.; Lagios, E.; Parcharidis, I. Orthophoto generation using IKONOS imagery and high-resolution DEM: A case study on volcanic hazard monitoring of Nisyros Island (Greece). ISPRS J. Photogramm. Remote Sens. 2002, 57, 24–38. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar]
- Lin, C.W.; Tseng, C.M.; Tseng, Y.H.; Fei, L.Y.; Hsieh, Y.C.; Tarolli, P. Recognition of large scale deep-seated landslides in forest areas of Taiwan using high resolution topography. J. Asian Earth Sci. 2013, 62, 389–400. [Google Scholar] [CrossRef]
- El Bastawesy, M.; Cherif, O.H.; Sultan, M. The geomorphological evidences of subsidence in the Nile Delta: Analysis of high resolution topographic DEM and multi-temporal satellite images. J. Afr. Earth Sci. 2016. [Google Scholar] [CrossRef]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Segmentation optimization and stratified object-based analysis for semi-automated geomorphological mapping. Remote Sens. Environ. 2011, 115, 2976–2985. [Google Scholar] [CrossRef]
- Amorós López, J.; Izquierdo Verdiguier, E.; Gómez Chova, L.; Muñoz Marí, J.; Rodríguez Barreiro, J.Z.; Camps Valls, G.; Calpe Maravilla, J. Land cover classification of VHR airborne images for citrus grove identification. ISPRS J. Photogr. Remote Sens. 2011, 66, 115–123. [Google Scholar] [CrossRef]
- Fornace, K.M.; Drakeley, C.J.; William, T.; Espino, F.; Cox, J. Mapping infectious disease landscapes: Unmanned aerial vehicles and epidemiology. Trends Parasitol. 2014, 30, 514–519. [Google Scholar] [CrossRef] [PubMed]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned Aerial Vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Lucieer, A.; Turner, D.; King, D.H.; Robinson, S.A. Using an Unmanned Aerial Vehicle (UAV) to capture micro-topography of Antarctic moss beds. Int. J. Appl. Earth Obs. Geoinformation 2014, 27, 53–62. [Google Scholar] [CrossRef]
- Artuso, R.; Bovet, S.; Streilein, A. Practical methods for the verification of countrywide terrain and surface models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 6. [Google Scholar]
- Liu, G.B.; Yang, Q.K.; Zheng, F.L. Chinese small watershed in the Loess Plateau governance and ecological construction. Sci. Soil Water Conserv. 2004, 2, 11–15. (In Chinese) [Google Scholar]
- Chen, H.X.; Cheng, W.M.; Qiao, Y.L. Classification System of 1:1 000 000 Digital Loess Geomorphology in China. Geo-Inf. Sci. 2006, 8, 6–13. [Google Scholar]
- Tang, G.; Li, F.; Liu, X.; Long, Y.; Yang, X. Research on the slope spectrum of the Loess Plateau. Sci. China Ser. E Technol. Sci. 2008, 51, 175–185. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Equation | Explanation |
|---|---|---|
| Angular Second Moment (ASM) | Angular second moment (ASM) is a measure of the homogeneity of an image. High values of ASM or energy occur when the window is highly orderly. | |
| Contrast | This measure of contrast or local intensity variation favors contributions from P(i, j) away from the diagonal, i.e., i! = j. | |
| Homogeneity | Homogeneity measures the closeness of the distribution of elements in the GLCM to the GLCM diagonal. | |
| Entropy | Inhomogeneous scenes exhibit low first-order entropy, whereas homogeneous scenes exhibit high entropy. | |
| Correlation | Correlation is a measure of gray-level linear dependence between pixels at specified positions relative to each other. |
| AC | Slope | CVE | SOS | TR | PN | |
|---|---|---|---|---|---|---|
| AC | 1 | |||||
| Slope | −0.003 | 1 | ||||
| CVE | 0.004 | 0.913 | 1 | |||
| SOS | −0.011 | 0.212 | 0.247 | 1 | ||
| TR | −0.001 | 0.931 | 0.936 | 0.231 | 1 | |
| PN | −0.387 | −0.010 | −0.009 | 0.002 | −0.029 | 1 |
| Combination of Indexes | PN, SOS, CVE, AC | PN, SOS, Slope, AC | PN, SOS, TR, AC |
|---|---|---|---|
| Entropy | 3.278 | 13.189 | 10.680 |
| Classification | Reference | Class. Totals | Prod. Ac. | User. Ac. | Omi. Er. | Com. Er. | |
|---|---|---|---|---|---|---|---|
| Terraces | Non-Terraces | ||||||
| Terraces | 260575 | 116343 | 376918 | 0.835 | 0.691 | 0.309 | 0.166 |
| Non-terraces | 51719 | 1245789 | 1297508 | 0.915 | 0.960 | 0.040 | 0.085 |
| Ref. Totals | 312293 | 1362135 | 1674428 | ||||
| Classification | Reference | Class. Totals | Prod. Ac. | User. Ac | Omi. Er. | Com. Er. | |
|---|---|---|---|---|---|---|---|
| Terraces | Non-Terraces | ||||||
| Terraces | 257549 | 46198 | 303747 | 0.825 | 0.848 | 0.152 | 0.175 |
| Non-terraces | 54742 | 1316039 | 1370781 | 0.966 | 0.960 | 0.040 | 0.034 |
| Ref. Totals | 312293 | 1362135 | 1674428 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Fang, X.; Ding, H.; Josef, S.; Xiong, L.; Na, J.; Tang, G. Extraction of Terraces on the Loess Plateau from High-Resolution DEMs and Imagery Utilizing Object-Based Image Analysis. ISPRS Int. J. Geo-Inf. 2017, 6, 157. https://doi.org/10.3390/ijgi6060157
Zhao H, Fang X, Ding H, Josef S, Xiong L, Na J, Tang G. Extraction of Terraces on the Loess Plateau from High-Resolution DEMs and Imagery Utilizing Object-Based Image Analysis. ISPRS International Journal of Geo-Information. 2017; 6(6):157. https://doi.org/10.3390/ijgi6060157
Chicago/Turabian StyleZhao, Hanqing, Xuan Fang, Hu Ding, Strobl Josef, Liyang Xiong, Jiaming Na, and Guoan Tang. 2017. "Extraction of Terraces on the Loess Plateau from High-Resolution DEMs and Imagery Utilizing Object-Based Image Analysis" ISPRS International Journal of Geo-Information 6, no. 6: 157. https://doi.org/10.3390/ijgi6060157