
The Building Blocks of User-Focused 3D City Models †, ‡


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
| ID | Characteristic | Brief Description |
|---|---|---|
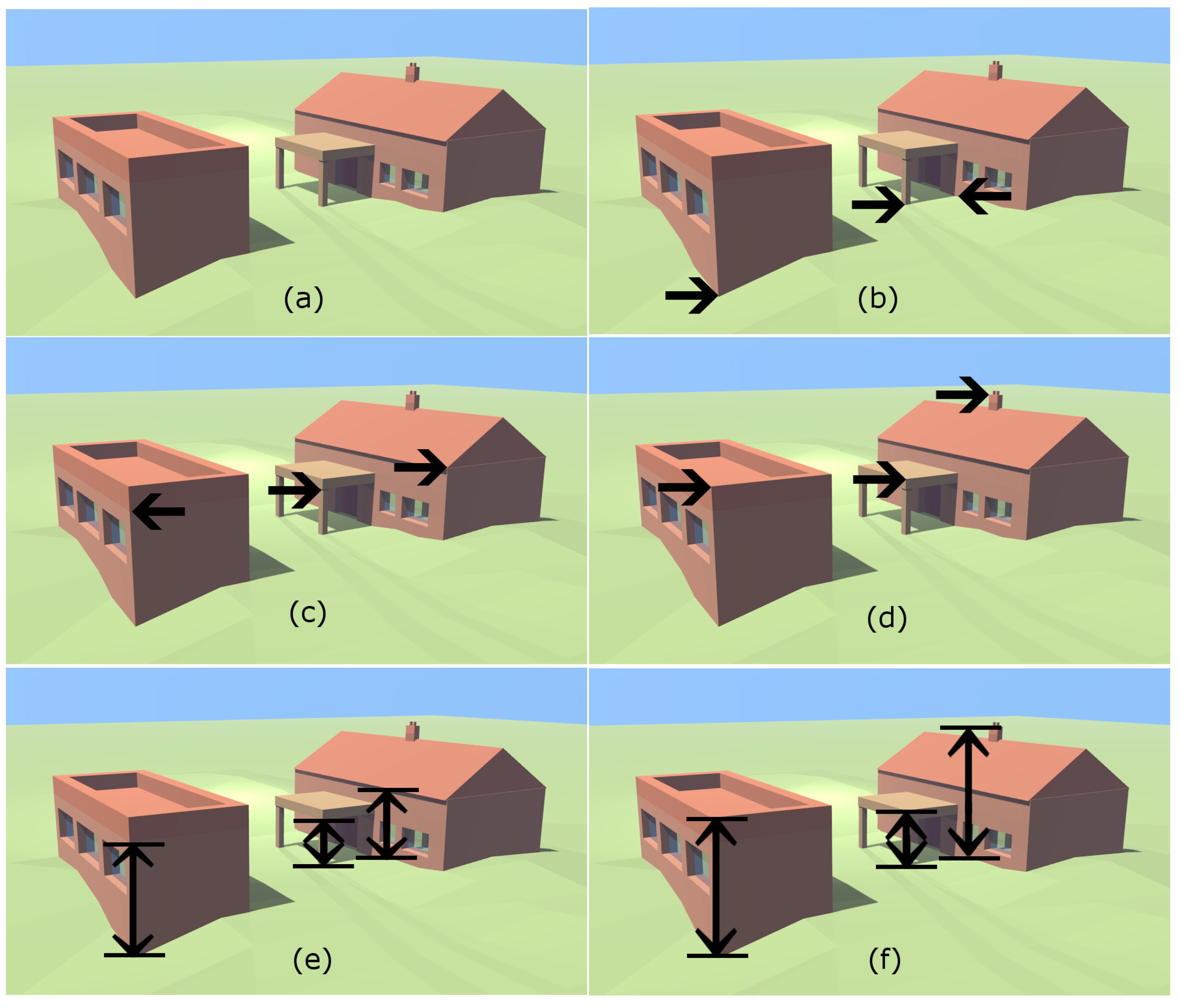
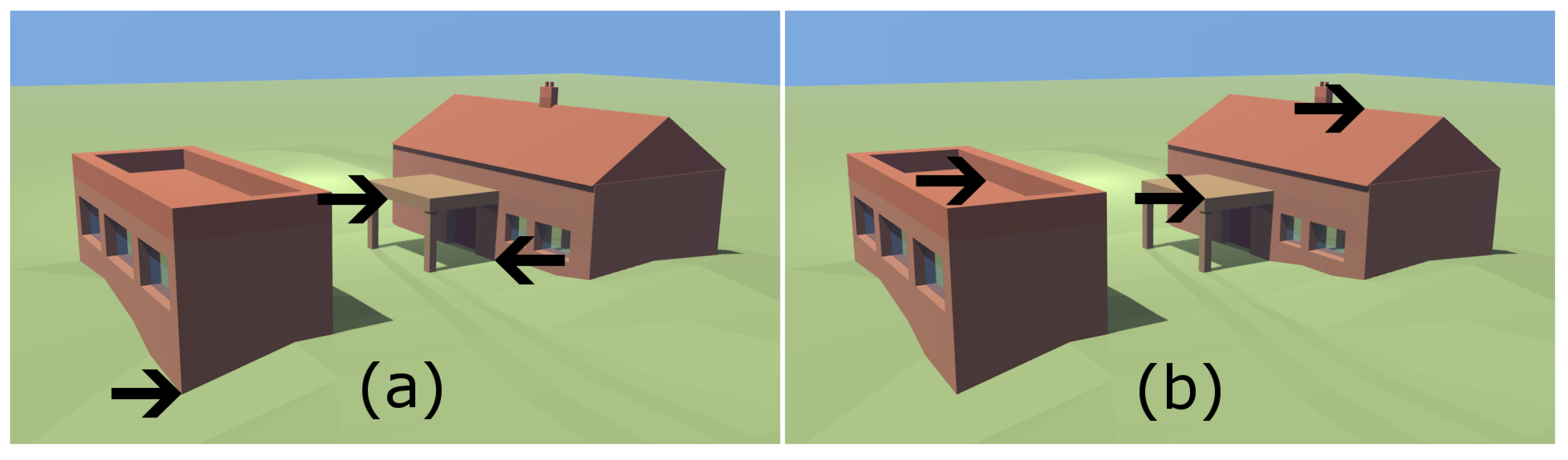
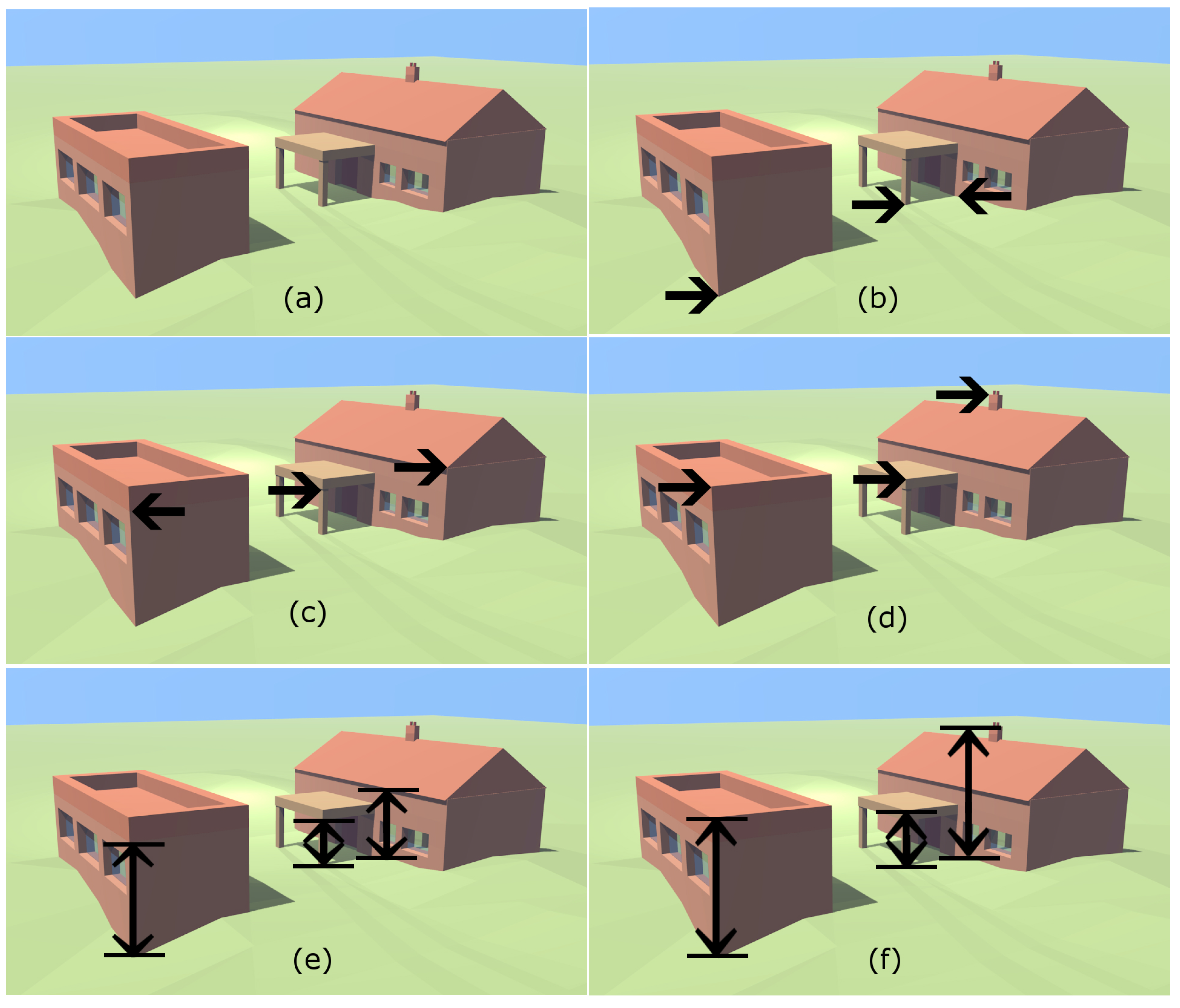
| 1 | Inter-building geometric shape | The 3D shape of the space between the buildings. |
| 2 | Roof geometric shape | The 3D shape of the building’s roof. |
| 3 | Complete building geometric shape | The 3D shape of the whole building. |
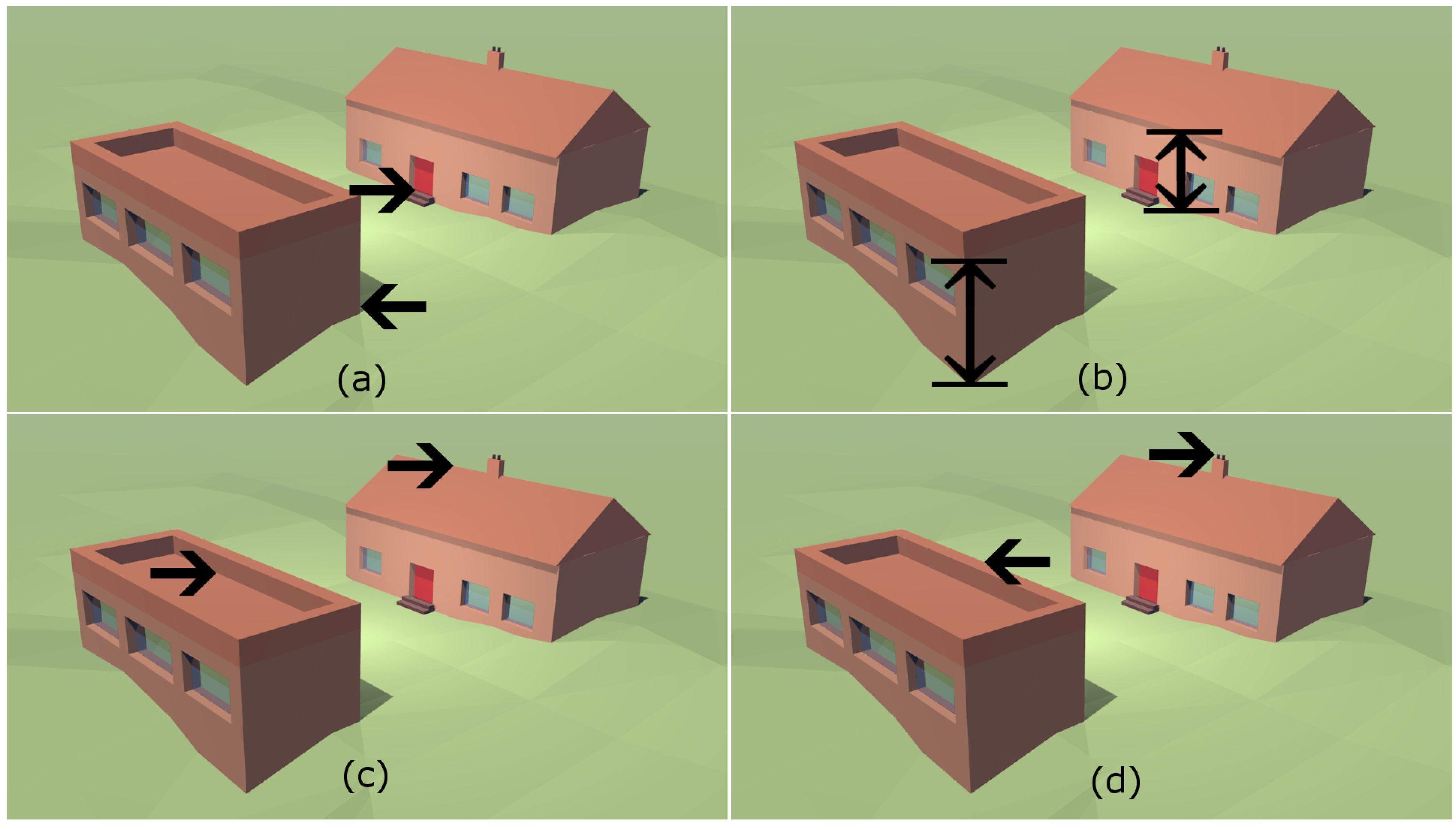
| 4 | Position and dimensions of doors and windows | Where the windows and doors are located in the building and their 3D shape. |
| 5 | Highest point of structure | The very highest point on the building (including roof fixtures, such as chimneys and aerials). |
| 6 | Maximum height of roof ridge | The maximum height of the ridge of the roof. This has been broadened to the maximum height of the main roof of the building. |
| 7 | Height of building to base of roof (eave height) | The height from the ground to the bottom of the roof structure (which is often slightly above the height of the eave). |
| 8 | Ground floor height | The height of the floor of the building’s ground floor. |
2. Research and Development of User-Focused 3D Data
2.1. Building Height Data
| Building Characteristic | Resulting Building Height Attribute (BHA) | BHA Description | Closest INSPIRE Elevation Reference Value |
|---|---|---|---|
| 8: “Ground floor height” (the ground has been substituted for the floor height) | AbsHmin | The absolute minimum height of the intersection of the external building walls and the underlying ground surface | Lowest Ground Point |
| 9: “Height of the base of the building” (can be above ground for non-obstructing detail, such as canopies and cantilevered buildings) | AbsH1 | The absolute height of the base of the building | Bottom of Construction |
| Part of Characteristic 7: “Height of building to base of roof” | AbsH2 | The absolute height of the base of the roof | General Eave |
| 6: “Maximum height of roof ridge” | AbsH3 | The absolute maximum height of the main roof | Top of Construction |
| 5: “Highest point of structure” | AbsHmax | The absolute height of the highest point on the building | Highest Point |
| 7: “Height of building to base of roof” (assuming that the bottom of the building and the ground are coincident) | RelH2 | AbsH2 − AbsHmin | n/a |
| n/a | RelHmax | AbsHmax − AbsHmin | n/a |
A “simple” building is one which has planar vertical walls and for which the base of the most visually-significant roof portion can be well characterised using a single horizontal plane. If such a horizontal plane cannot be easily established, the building will be classified as “complex”.
2.2. Three-Dimensional Shape
2.3. Attribution Related to Building Geometry
3. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Harding, J. Vector data quality: A data provider’s perspective. In Fundamentals of Spatial Data Quality; Devillers, R., Jeansoulin, R., Eds.; ISTE: London, UK, 2010; pp. 141–159. [Google Scholar]
- Davies, C.; Holt, I.; Green, J.; Harding, J.; Diamond, L. User needs and implications for modelling vague named places. Spat. Cognit. Comput. 2009, 9, 174–194. [Google Scholar] [CrossRef]
- Schuster, H.F.; Weidner, U. A new approach towards quantitative quality evaluation of 3D building models. In Procedings of the ISPRS Commission IV Joint Workshop Challenges in Geospatial Analysis, Integration and Visualization II, Stuttgart, Germany, 8–9 September 2003.
- Meidow, J.; Schuster, H.F. Voxel-based quality evaluation of phtogrammetric building acquisitions. In Proceedings of 2005 Object Extraction for 3D City Models, Road Databases and Traffic Monitoring—Concepts, Algorithms and Evaluation, Vienna, Austria, 29–30 August 2005.
- Landes, T.; Grussenmeyer, P.; Boulaassal, H.; Mohamed, M. Assessment of three-dimensional models derived from lidar and TLS data. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2012, 34, 95–100. [Google Scholar] [CrossRef]
- Zeng, C.; Zhao, T.; Wang, J. A multicriteria evaluation method for 3-D building reconstruction. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1619–1623. [Google Scholar] [CrossRef]
- Musungu, K. Assessing spatial data quality of participatory GIS studies: A case study in Cape Town. In Proceedings of the 2015 Joint International Geoinformation Conference, Kuala Lumpur, Malaysia, 29–30 August 2015; pp. 75–82.
- Van Erp, J.B.; Cremers, A.H.; Kessens, J.M. Challenges in 3D Geo information and participatory design and decision. In Proceedings of the 5th International Conference on 3D GeoInformation, Berlin, Germany, 3–4 November 2010.
- De Cubber, I.; Van Orshoven, J. 3D-capabilities required by users of the 2D-large scale topographic reference database in Flanders, Belgium. In Proceedings of the 5th International Conference on 3D GeoInformation, Berlin, Germany, 3–4 November 2010.
- Stoter, J.E.; Streilein, A.; Pla, M.; Baella, B.; Capstick, D.; Home, R.; Roensdorf, C.; Lagrange, J.P. Approaches of national 3D mapping: Research results and standardisation in practice. In Proceedings of the 8th 3DGeoInfo Conference & WG II/2 Workshop, Istanbul, Turkey, 27–29 November 2013.
- Billen, R.; Cutting-Decelle, A.F.; Marina, O.; de Almeida, J.P.; Caglioni, G.F.; Leduc, T.; Métral, C.; Moreau, G.; Perret, J.; Rabino, G.; et al. 3D City Models and Urban Information: Current Issues And Perspectives. European COST Action TU0801; EDP Sciences: Cedex, France, 2014. [Google Scholar]
- Maguire, M. Methods to support human centred design. Int. J. Hum. Comput. Stud. 2001, 55, 587–634. [Google Scholar] [CrossRef]
- Sargent, I.; Harding, J.; Freeman, M. Data quality in 3D: Gauging quality measures from users’ requirements. In Proceedings of the 5th International Symposium on Spatial Data Quality, Santander, Spain, 20–23 June 2007.
- Morton, P.J. A Global perspective in the development and distribution of VCMs. In Proceedings of the Northumbria Research Conference, Newcastle, UK, 15–16 May 2013.
- Jazayeri, I.; Rajabifard, A.; Kalantari, M. A geometric and semantic evaluation of 3D data sourcing methods for land and property information. Land Use Policy 2014, 36, 219–230. [Google Scholar] [CrossRef]
- OS Insight. Available online: http://www.ordnancesurvey.co.uk/business-and-government/help-and-support/os-insight/index.html (accessed on 11 November 2015).
- INSPIRE Thematic Working Group Buildings. In SPIRE Data Specification on Buildings—Technical Guidelines; European Commission Joint Research Centre: Brussels, Belgium, 2012.
- Groger, G.; Kolbe, T.H.; Nagel, C.; Hafele, K.H. OGC City Geography Markup Language (CityGML) En-Coding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Nelson, G. We’ve Launched a New Height Product—OS Terrain 5. Available online: http://www.ordnancesurvey.co.uk/blog/2013/07/weve-launched-a-new-height-product-os-terrain-5/ (accessed on 10 December 2015).
- Osborne, M. OS OpenData Product Update—OS Terrain 50. Available online: http://www.ordnancesurvey.co.uk/blog/2013/04/os-opendata-product-update-os-terrain-50/ (accessed on 10 December 2015).
- Nelson, G. New Building Height Data Released. Available online: http://www.ordnancesurvey.co.uk/blog/2014/03/new-building-height-data-released/ (accessed on 10 December 2015).
- Ordnance Survey. OS MasterMap Topography Layer. User Guide. Available online: http://www.ordnancesurvey.co.uk/docs/user-guides/os-mastermap-topography-layer-user-guide.pdf (accessed on 11 November 2015).
- Amiri Parian, J.; Sargent, I. Automatic height attribute assignment for building polygons: City modeling with level of detail zero. In Proceedings of the 8th Conference on Optical 3-D Measurement Techniques, Athens, Greece, 9–12 July 2007.
- Huang, H.; Brenner, C.; Sester, M. 3D building roof reconstruction from point clouds via generative models. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 1–4 November 2011; pp. 16–24.
- Tseng, Y.H.; Wang, S. Semiautomated building extraction based on CSG model-image fitting. Photogram. Eng. Remote Sens. 2003, 69, 171–180. [Google Scholar] [CrossRef]
- Scholze, S.; Moons, T.; Gool, L.V. A probabilistic approach to roof extraction and reconstruction. In Proceedings of the 2002 ISPRS Commision III Symposium, Zurich, Switzerland, 5–7 September 2002; pp. 231–236.
- Sampath, A.; Shan, J. Segmentation and reconstruction of polyhedral building roofs from aerial lidar point clouds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1554–1567. [Google Scholar] [CrossRef]
- Brenner, C. City models—Automation in research and practice. In Photogrammetric Week 01; Wichmann: Hannover, Germany, 2001; pp. 149–158. [Google Scholar]
- Musialski, P.; Wonka, P.; Aliaga, D.G.; Wimmer, M.; van Gool, L.; Purgathofer, W. A Survey of urban reconstruction. Comput. Graph. Forum 2013, 32, 146–177. [Google Scholar] [CrossRef]
- Wong, K.; Ellul, C. Enhancing positioning of photovoltaic panels using 3D geographic information. In Proceedings of the 21st GIS Research UK (GISRUK) Conference, Liverpool, UK, 3–5 April 2015.
- Heimann, D. Three-dimensional linearised Euler model simulations of sound propagation in idealised urban situations with wind effects. Appl. Acoust. 2007, 68, 217–237. [Google Scholar] [CrossRef]
- Capstick, D.; Heathcote, G.; Horgan, J.; Sargent, I. Moving towards 3D: From a national mapping agency perspective. In Proceedings of the 3rd International Conference on the Virtual City and Territory, Bilbao, Spain, 25–27 October 2006.
- Tse, R.O.C.; Dakowicz, M.; Gold, C.M.; Kidner, D. Building reconstruction using LIDAR data. In Proceedings of the 4th ISPRS Workshop on Dynamic and Multi-dimensional GIS, Pontypridd, UK, 5–8 September 2005; pp. 156–161.
- McClune, A.P.; Miller, P.E.; Mills, J.P.; Holland, D. Automatic urban 3D building reconstruction from multi-ray photogrammetry. In Proceedings of the ISPRS Technical Commission III Symposium Conference, Zurich, Switzerland, 5–7 September 2014.
- Sargent, I.M.J.; Holland, D.A. A machine learning approach to roof shape classification. In Proceedings of the 2015 RSPSoc, NCEO and CEOI-ST Joint Annual Conference, Noida, India, 8–11 September 2015.
- Akca, D.; Freeman, M.; Gruen, A.; Sargent, I. Quality assessment of 3D building data by 3D surface matching. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2008, 37, 771–778. [Google Scholar]
- Freeman, M.; Sargent, I. Quantifying and visualising the uncertainty in 3D building model walls using terrestrial lidar data. In Proceedings of the 2008 Remote Sensing and Photogrammetry Society Conference on Measuring Change in the Earth System, Exeter, UK, 15–17 September 2008.
- Oude Elberink, S.; Vosselman, G. Quality analysis on 3D building models reconstructed from airborne laser scanning data. ISPRS J. Photogram. Remote Sens. 2011, 66, 157–165. [Google Scholar] [CrossRef]
- Wong, K.K.Y.; Ellul, C. Designing 3D geographic information for navigation using google glass. In Proceedings of the 23rd GIS Research UK (GISRUK) Conference, Leeds, UK, 15–17 April 2015.
- Kolbe, T.H.; Gröger, G.; Plümer, L. CityGML—Interoperable access to 3D city models. In Geo-information for Disaster Management; van Oosterom, P., Zlatanova, S., Fendel, E.M., Eds.; Springer: Berlin, Germany, 2005; pp. 883–899. [Google Scholar]
- Pretty, S. Your 3D future—How could 3D work for you? Ordnance Survey: Southampton, UK, Unpublished work. 2005. [Google Scholar]
- Kolbe, T.H. Representing and exchanging 3D city models with CityGML. In 3D Geo-Information Sciences; Lee, J., Zlatanova, S., Eds.; Springer: Berlin, Germany, 2009; pp. 15–31. [Google Scholar]
- Jones, C.; Rosin, P.; Slade, J. Semantic and geometric enrichment of 3D geo-spatial models with captioned photos and labelled illustrations. In Proceedings of the 25th International Conference on Computational Linguistics, Dublin, Ireland, 23–29 August 2014; pp. 62–67.
- Slade, J.; Jones, C.B.; Rosin, P.L. Semantic and geometric enrichment of 3D geo-spatial building models with photo captions and illustration labels. In Proceedings of the 23rd GIS Research UK (GISRUK) Conference, Leeds, UK, 15–17 April 2015.
- Wagner, D.; Alam, N.; Coors, V. Geometric validation of 3D city models based on standardized quality criteria. In Urban and Regional Data Management UDMS Annual; Ellul, C., Zlatanova, S., Rumor, M., Laurini, R., Eds.; CRC Press: Boca Raton, FL, USA, 2013; pp. 197–210. [Google Scholar]
- Nielsen, J. Usability Engineering; Morgan Kaufmann: San Francisco, CA, USA, 1994. [Google Scholar]
- Wiechert, A.; Gruber, M.; Karner, K.; Ponticelli, M.; Schachinger, B. The power of multi-ray photogrammetry—Ultramap 3.0. In Proceedings of 2012 ASPRS Annual Conference, Sacramento, CA, USA, 19–23 March 2012.
- Rothermel, M.; Wenzel, K. SURE—Photogrammetric surface reconstruction from imagery. In Proceedings of LC3D Workshop, Berlin, Germany, 6–7 December 2012.
© Crown copyright 2015 OS; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sargent, I.; Holland, D.; Harding, J. The Building Blocks of User-Focused 3D City Models. ISPRS Int. J. Geo-Inf. 2015, 4, 2890-2904. https://doi.org/10.3390/ijgi4042890
Sargent I, Holland D, Harding J. The Building Blocks of User-Focused 3D City Models. ISPRS International Journal of Geo-Information. 2015; 4(4):2890-2904. https://doi.org/10.3390/ijgi4042890
Chicago/Turabian StyleSargent, Isabel, David Holland, and Jenny Harding. 2015. "The Building Blocks of User-Focused 3D City Models" ISPRS International Journal of Geo-Information 4, no. 4: 2890-2904. https://doi.org/10.3390/ijgi4042890
APA StyleSargent, I., Holland, D., & Harding, J. (2015). The Building Blocks of User-Focused 3D City Models. ISPRS International Journal of Geo-Information, 4(4), 2890-2904. https://doi.org/10.3390/ijgi4042890