1. Introduction
Remote sensing has long been heralded for its utility in furthering ecological research, in particular, for its ability to facilitate assessment and monitoring of biodiversity [
1,
2]. In previous decades, much of this research focused on the indirect assessment of biodiversity through mapping of parameters, such as habitat extent and landscape pattern, relating this to biodiversity [
3]. In recent years, however, the increased spatial and spectral resolution of remote sensors has made it increasingly feasible to conduct direct mapping of biodiversity, through the mapping of plant and tree canopies and assemblages and, in some cases, through identification of individual species of trees [
4,
5].
Very high spatial resolution imagery enables the accurate identification of the spatial contours of small objects, such as tree canopies, but challenges still exist in terms of actual use. For one, at the spatial resolution afforded by current hyperspatial sensors, such as IKONOS, GeoEye and QuickBird, differences between sunlit leaves, bark and shade become prominent, making it difficult to delineate tree crowns [
6]. Under such circumstances, traditional, pixel-based classification of tree canopies becomes challenging, due to the high contrast between pixels that represent different parts of a single object [
7]. Instead, object-oriented classification algorithms have been proposed as being particularly useful, wherein the units of classification are not single pixels, but instead considered to be segments within an image that share similar characteristics, such as a particular spatial texture or pattern [
8]. Classification is then performed on these objects, making use of spatial information, such as on their location, area, shape, texture or directional pattern, to produce more informed classifications [
7,
9]. Object-oriented classification generally begins with the delineation and generation of segments at multiple scales, which then become the fundamental unit of image analysis in contrast to per-pixel approaches, which consider a single pixel as the basic unit of analysis, omitting information about shape and spatial context [
7]. Most object-oriented classification approaches further adopt an approach of multi-resolution image segmentation, representing image information in multiple object layers that are overlaid at different scales, enabling the analysis of objects at a certain scale based on spectral or textural information, while other objects, perhaps at more detailed scales, can be analyzed based on expert or field knowledge of local context [
6].
There continues to be debate on the best approaches to use to derive information on biodiversity from hyperspatial imagery [
3]. The studies that exist are limited and have been largely conducted in forested or savanna environments (e.g., [
10,
11,
12,
13]). Cities have been less investigated, particularly from an ecological point of view (although there have been many studies that examine the use of very high spatial imagery for mapping urban features, e.g., [
14,
15]). Yet, cities constitute another, hitherto largely unexplored, rich arena of biodiversity [
16], one that demands further exploration as we enter the era of the Anthropocene. With more than 50% of the world’s population already living in cities [
17], it is critical to assess, monitor and understand the context within which urban biodiversity is embedded.
Cities also constitute a significant challenge for biodiversity monitoring. The species diversity found in cities is often higher than in rural or native ecosystems, with urban areas often harboring large numbers of alien species that may be self-sustaining, but are often planted and maintained by consistent human intervention and input [
18,
19]. Thus, conventional approaches that rely on ecological information, such as habitat quality, environmental variation, biophysical location or landscape context to map biodiversity distribution [
1,
12], are challenging to implement in urban environments, where species that may never co-occur in nature have been intermingled by intentional planting and species are encountered that are not normally found at specific latitudes, altitudes, slopes or climatic envelopes, soils or landscape contexts due to the human selection of planting location and extensive reliance on the addition of inputs, such as water and fertilizers [
19].
This paper focuses on assessing the potential of very high resolution satellite imagery for the mapping and identification of tree species in heterogeneous, biodiverse and challenging urban environments, using the rapidly growing south Indian city of Bangalore as a case study. We aim to develop and test object-oriented methods for tree mapping and biodiversity assessment in Bangalore and to compare these with more traditional pixel-based approaches for classification, assessing the relative accuracy of both approaches and identifying challenges and potential for further research.
2. Study Area
Bangalore, the capital of the south Indian state of Karnataka, has become famous internationally in recent years for its information technology industry. Additionally, the city has a long history of settlement and is known in India for its pleasant climate, green spaces and lakes, often called the “Garden City” of India [
20]. The city has expanded substantially in recent years, with an increase in population from 163,091 in 1901 to 8,499,399 in 2011 [
21], with a major impact on biodiversity leading to widespread tree felling and encroachment of urban forests and wetlands [
20,
22,
23,
24].
Bangalore contains a rich diversity of plants and trees located within multiple land use categories [
22,
23,
24,
25]. The city has a relatively high tree diversity compared to many other cities [
22]. A large proportion of the species found here are exotics, and many have been planted for well over a century, with the aim of ensuring a succession of species flowering across all seasons [
26,
27]. Particularly in the city center, most green patches have been planted by human intervention, responding to social preferences that vary across location and time, rather than ecological characteristics [
25]. For instance, wider streets and older parks tend to be dominated by large-canopied tree species, while narrow streets and recent parks contain a greater proportion of short-statured, small-canopied species that are easier to maintain, but less likely to provide the same range of environmental and ecological services [
22,
23]. Home gardens in Bangalore are also very rich in plant diversity [
24].
Despite the extensive clearing and fragmentation of vegetation in many parts of Bangalore, the city core still supports substantial vegetation [
28]. Some of this is found in the city’s large number of parks, lakes, old sprawling home gardens and wooded streets [
23,
29]. Additionally, given the city’s colonial history as a former British military establishment, a lot of the city’s tree cover is also found in areas managed by the military and defense establishments, public sector industries and educational institutions [
28]. Each of these locations and land use types supports its own distinct set of trees, responding less to ecological characteristics and more to social, cultural and economic preferences [
30]. Thus, it is common, for instance, to observe coconut trees and other palms, with their small canopy diameter and distinct aerial appearance, located in homes abutting large roads with sprawling avenue trees, such as the copper pod (
Peltophorum pterocarpum) or rain tree (
Samanea saman). Such heterogeneity in species distribution makes the city an especially challenging location for biodiversity mapping using remote sensing.
3. Methods
Within the Bruhat Bengaluru Mahanagara Palike (Bangalore municipality) administrative limits, we focused on the central core, which represents many of the older parts of Bangalore [
28]. Within a 2 km circle around the city center (the General Post Office), a grid with 521 square cells of 150 m × 150 m was constructed. One of the aims of our future research was to compare the ability of very high spatial resolution imagery (such as GeoEye) against high spatial imagery (such as Landsat) for biodiversity mapping [
6]. Thus, we selected a grid size that encompassed 25 Landsat pixels (of 30 m pixel size) and 150 pixels of GeoEye, a grid size that was sufficiently large so as to enable us to additionally generate measures of texture variation within grids for association with biodiversity, if required [
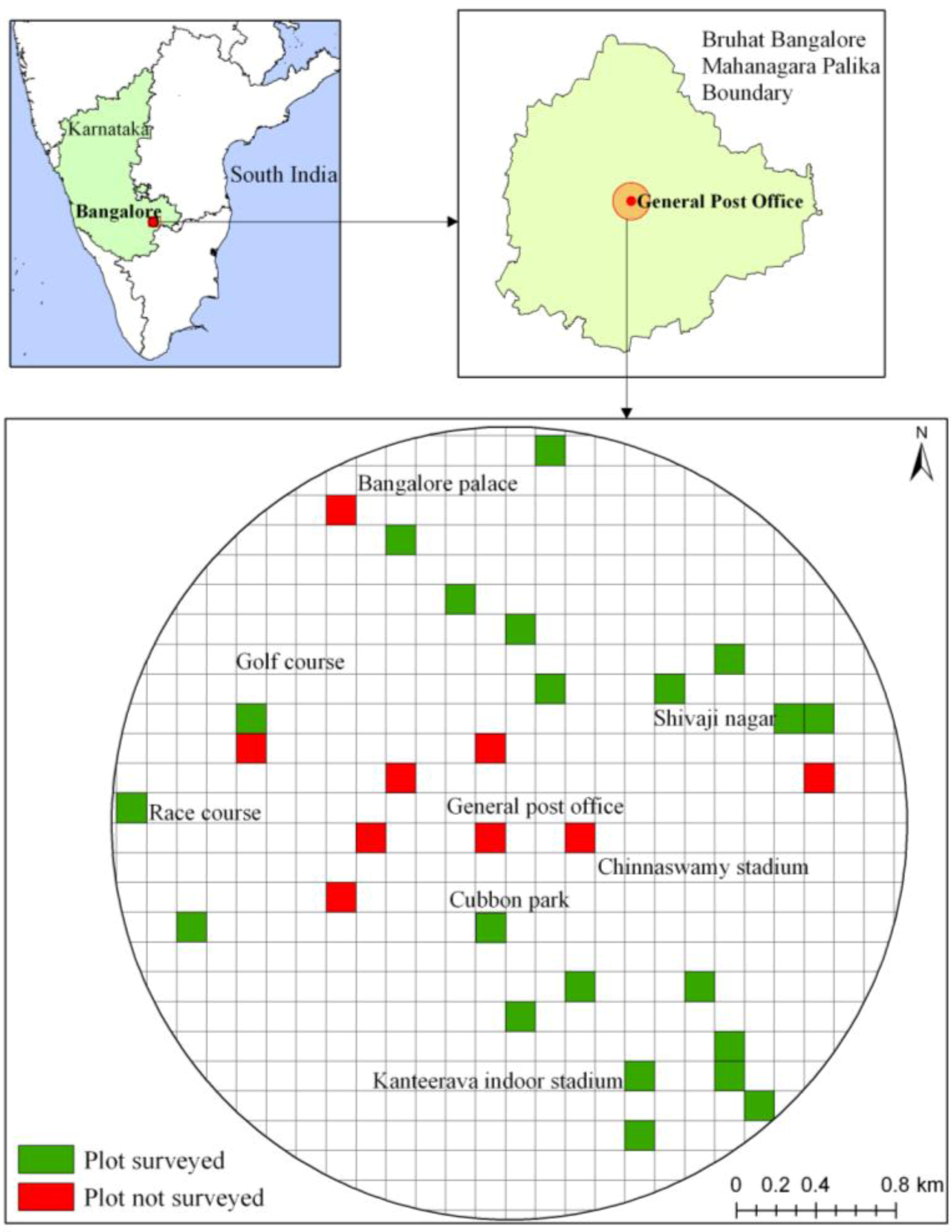
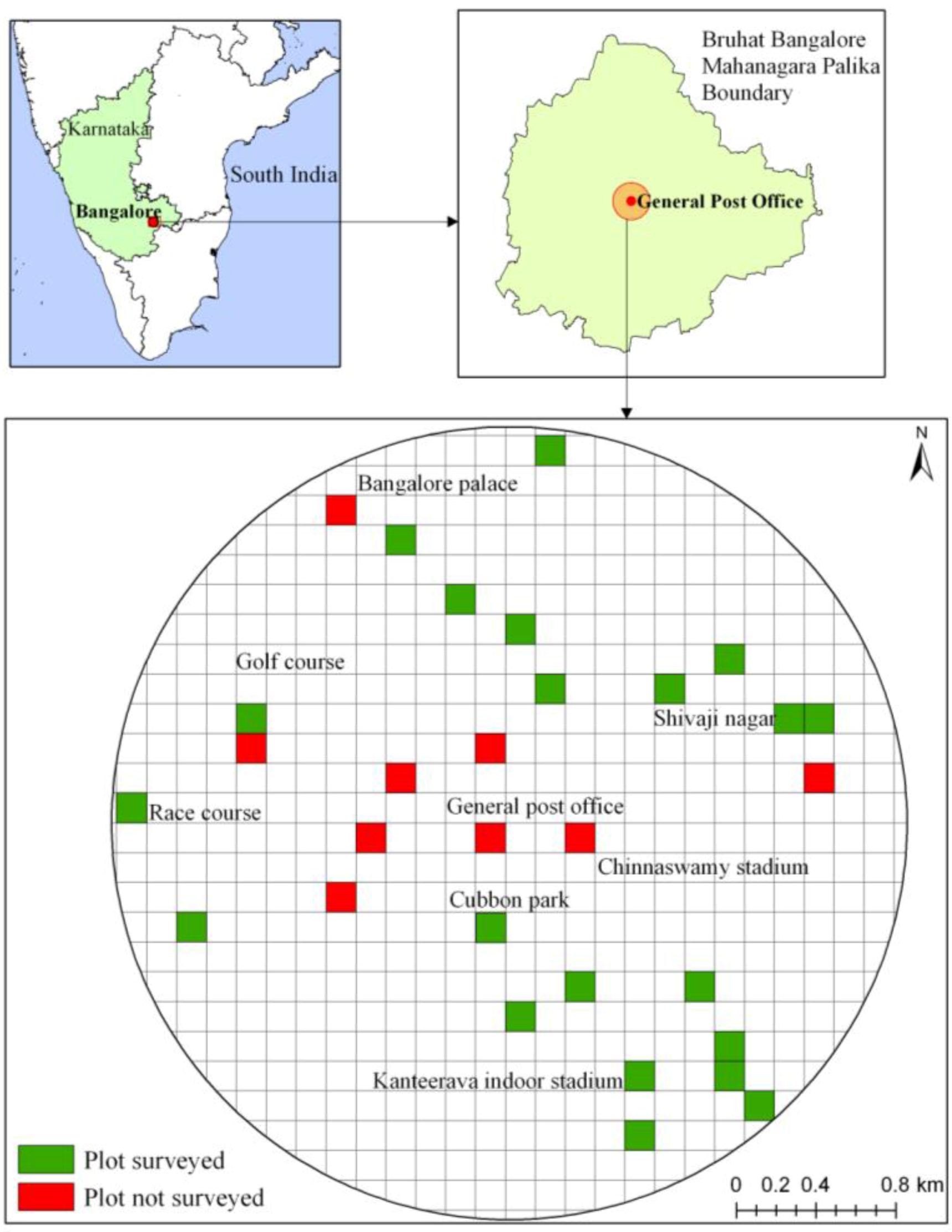
31]. Within this sampling area, 30 grid cells were randomly located, so as to cover at least 5% of the sample area (
Figure 1).
Figure 1.
Map of Bangalore, depicting a 2 km circle in the center where grid cells were overlaid for sampling, with local place areas within the city also marked for identification.
Figure 1.
Map of Bangalore, depicting a 2 km circle in the center where grid cells were overlaid for sampling, with local place areas within the city also marked for identification.
A multi-spectral pan-sharpened GeoEye image of 1 m resolution collected on 7 August 2009 was acquired for this region. This image is acquired post monsoon, when deciduous, as well as evergreen, trees are covered with a dense growth of leaves, making it easier for remote sensing-based discrimination based on differences in leaf spectral characteristics. Detailed field visits were made to each grid cell, within which we located all trees, identified species identity and mapped the spatial distribution of each tree crown on to a false color composite of the GeoEye image using a GPS in conjunction with field sketches drawn on paper printouts of the image. This information was subsequently digitized onto the image using ArcGIS 9.2 to create a spatial database of the trees located in the sampled grid cells, to be used subsequently for pixel-based and object-oriented classification. Of the 30 cells, 21 cells were surveyed in detail, while we were unable to survey nine cells, either because they completely lacked trees or were in locations that we were unable to get permission to access for sampling (
Figure 1).
A large number of tree species are found commonly distributed in Bangalore [
22,
23,
24,
26,
27], and it is not possible to train the classifier on all species based on the amount of field information available. Consequently, we focused on the most common species for which sufficient ground information could be available for image training, which comprised at least 5% of the total number of species documented in the 21 sampled grids. Areas of Interest (AOIs) were created based on the tree crown information digitized from the field, taking care to manually exclude all pixels located in tree shadow areas (brightness values less than 120, with this cutoff identified based on visual inspection of the image) to avoid problems of differing image reflectance values in these locations [
6,
31].
Prior to performing per-pixel classification, we conducted a histogram analysis of the distribution of reflectance values in bands 1–4 for each of the selected species (
Table 1). As the histograms for all species were heavily skewed and, consequently, non-normal in distribution, conventional maximum likelihood supervised classifiers could not be applied on this dataset [
32]. Instead, we utilized a minimum distance rule for supervised classification, using 50% of the surveyed AOIs corresponding to each species for classification (
Figure 2). In addition to the selected species of focal interest, additional AOIs were created to provide training information for trees belonging to other species, as well as for areas covered by grass, shade and other, non-vegetated surfaces, such as built areas, water bodies and open grounds (subsequently merged into a single category post-classification). Accuracy assessment of the selected focal tree species was subsequently conducted using a set of independent pixels not used for training. A total of 68 trees were selected for accuracy assessment, with a single pixel at the centroid of the crown used to assess accuracy, taking care to ensure that pixels used for accuracy assessment were distributed across surveyed grids to the extent possible and that the relative number of points within each tree species reflected their overall frequency of distribution in the dataset. ERDAS Imagine 9.2 was used for the pixel-based classification procedures. We also conducted a Mann-Whitney U test [
33] to assess the statistical significance of differences in pixel values for each pair of selected focal tree species, comparing across all four reflectance bands of the image, as well as the Normalized Difference Vegetation Index (NDVI) [
32].
Table 1.
Range in band reflectance exhibited for each tree species.
Table 1.
Range in band reflectance exhibited for each tree species.
| Species | Samanea saman (Rain tree) | Mangifera indica (Mango) | Cocos nucifera (Coconut) | Polyalthia longifolia (Mast tree) | Roystonea regia (Royal palm) | Peltophorum pterocarpum (Copper pod) |
|---|
| Band 1 | 106–245 | 112–253 | 113–231 | 116–196 | 113–214 | 108–245 |
| Band 2 | 114–367 | 114–387 | 123–340 | 127–288 | 121–313 | 118–374 |
| Band 3 | 29–234 | 35–254 | 35–205 | 40–170 | 38–187 | 32–234 |
| Band 4 | 102–774 | 97–761 | 115–725 | 125–553 | 118–585 | 117–845 |
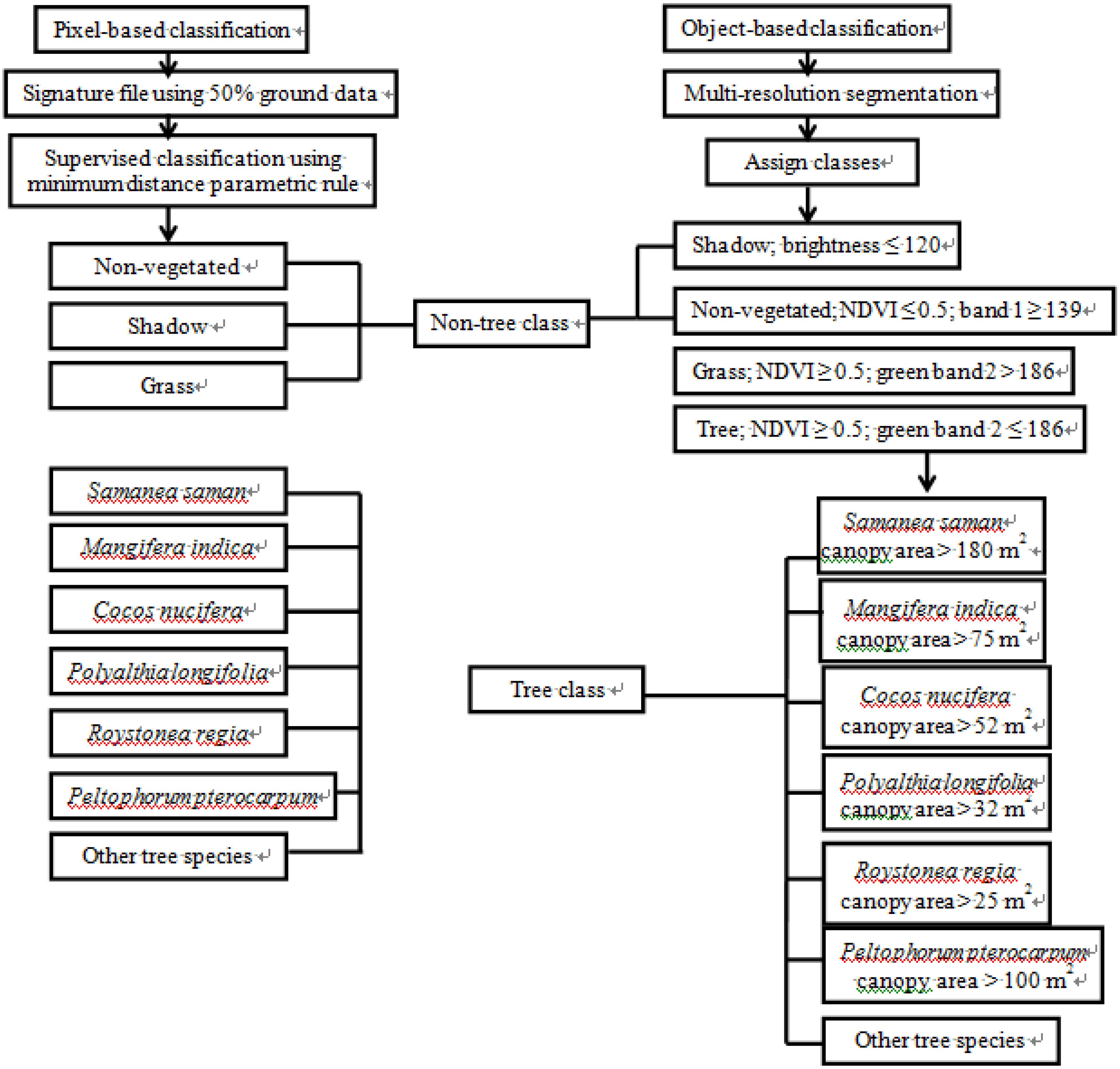
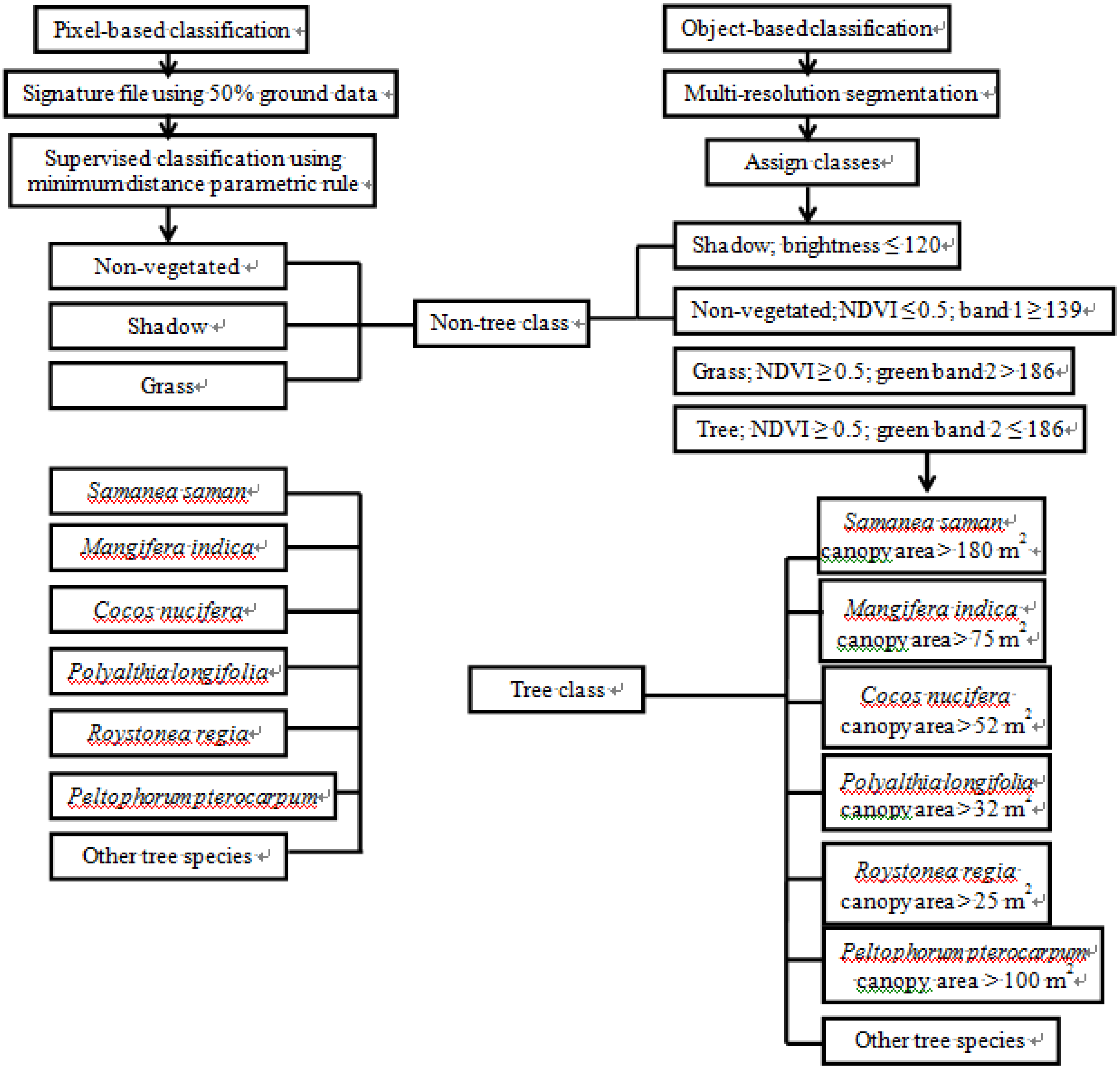
Figure 2.
Flow chart summarizing the methodology for pixel-based and object-based classification.
Figure 2.
Flow chart summarizing the methodology for pixel-based and object-based classification.
The software, eCognition Developer 8.7, was used for object-oriented classification (
Figure 2). As a first step, scale-based segmentation to create large segments was conducted, using multi-resolution segmentation. Objects are formed within eCognition using an agglomerative region-growing process, by which single pixel objects are initially formed and then merged into successively larger objects through a repeated exercise of pair-wise clustering. At each stage, the within-object heterogeneity is calculated based on variations in color and shape, and object growing is stopped when further growth leads to the smallest object exceeding a user-defined heterogeneity threshold, also called the scale parameter. A range of scale parameters were experimented upon within eCognition using the Estimation of Scale Parameter tool, and we finally used a factor of 25 based on our field knowledge.
Shadow areas (brightness 52–118, band 1 114–154, band 2 133–179, band 3 46–90, band 4 37–220) were masked out using a cutoff of brightness [
32] values less than 120. The image was then used to mask out non-vegetated areas (brightness 104–1,532, band 1 139–1,369, band 2 103–1,841, band 3 58–1,411, band 4 39–2047) using the NDVI and band 1 as a segregating factor, with values of NDVI lower than 0.5 and band 1 reflectance values lesser than 139 classified as non-vegetated. The remaining (vegetated) areas were further divided, with grass/bushes (brightness 129–280, band 1 98–142, band 2 142–357, band 3 25–218 and band 4 10–635), using a cutoff of band 2 reflectance values below 186. Band cutoffs for different classes were identified based on visual inspection of the imagery, relating this to classes of interest. As the band distributions for all classes were highly skewed, there is some overlap between classes, but this is relatively minor in terms of percentage of pixels.
The tree category was the subsequent focus of species-based classification, with objects in the tree class classified into seven different tree species classes (six dominant species of interest and an additional category comprising of all other species) using nearest neighborhood classification. The mean and standard deviation value of bands 1–4, NDVI, compactness, roundness and canopy area were sampled using a randomly selected set of canopy shapefiles for half of the trees for which ground data was available and used for nearest neighborhood classification. Compactness is calculated as the square of the perimeter of the object (here, a tree crown), divided by the area of the object and divided by a factor of 4π (a correction factor ensuring that a perfect circle takes the lowest compactness value of 1). Roundness is calculated as the inverse of compactness. Segments within the classified six species were merged and segmented again using multi-resolution segmentation based on the respective canopy area. A shapefile of the classified layer was exported from eCognition to ArcGIS for plot-wise comparisons between object-based segmentation and field data. Accuracy assessment for object-oriented classification was conducted using the same set of 68 independent points used for the accuracy assessment of pixel-based classification.
4. Results and Discussion
During field surveys of 21 grid cells, 1,727 individual trees were recorded from 66 species. Of these, six species were considered to be common, represented in more than 5% of the trees in the sampled grids. These six species are
Samanea saman (rain tree),
Mangifera indica (mango tree),
Cocos nucifera (coconut tree),
Polyalthia longifolia (mast tree),
Roystonea regia (royal palm) and
Peltophorum pterocarpum (copper pod), all species that are commonly encountered in Bangalore [
22,
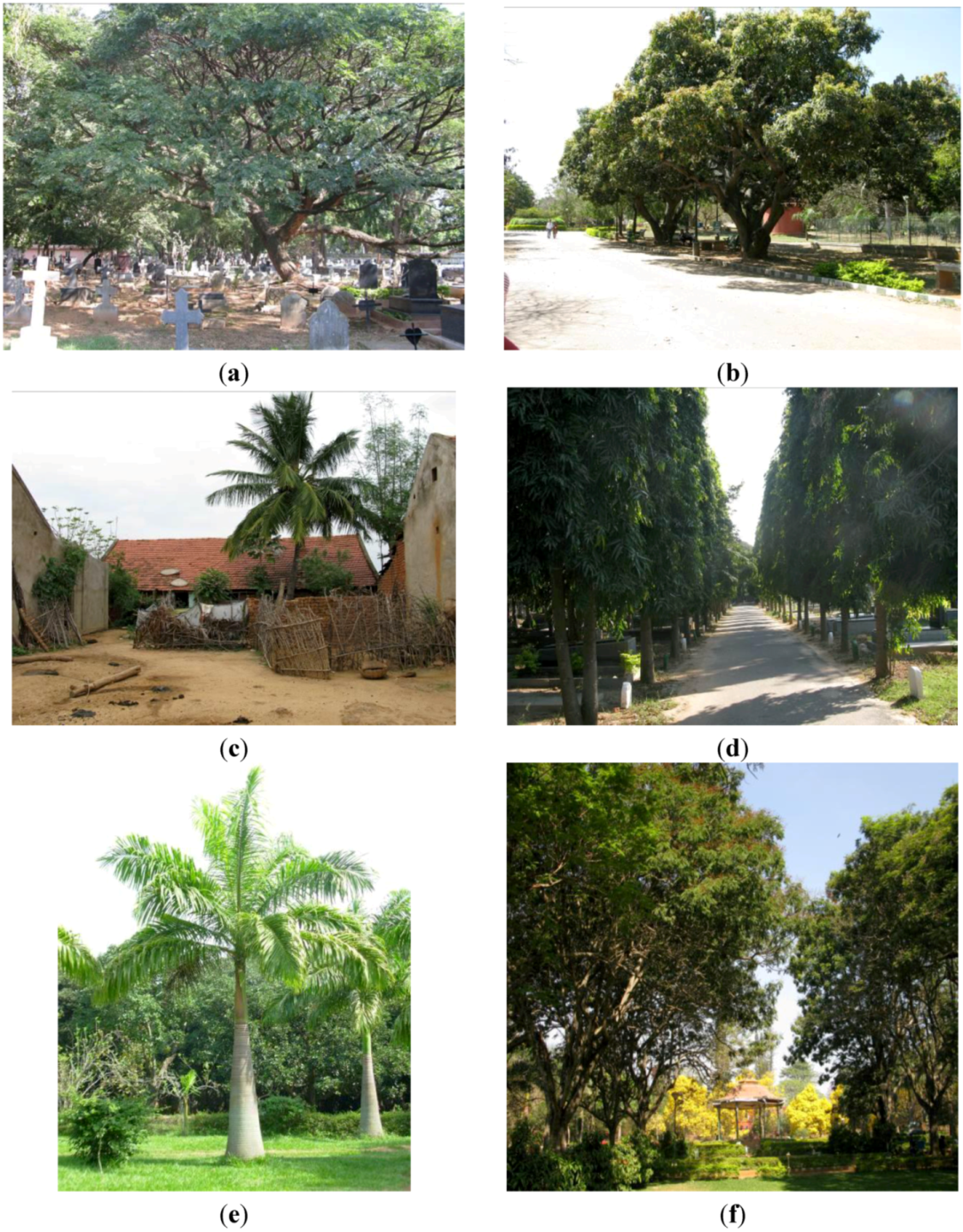
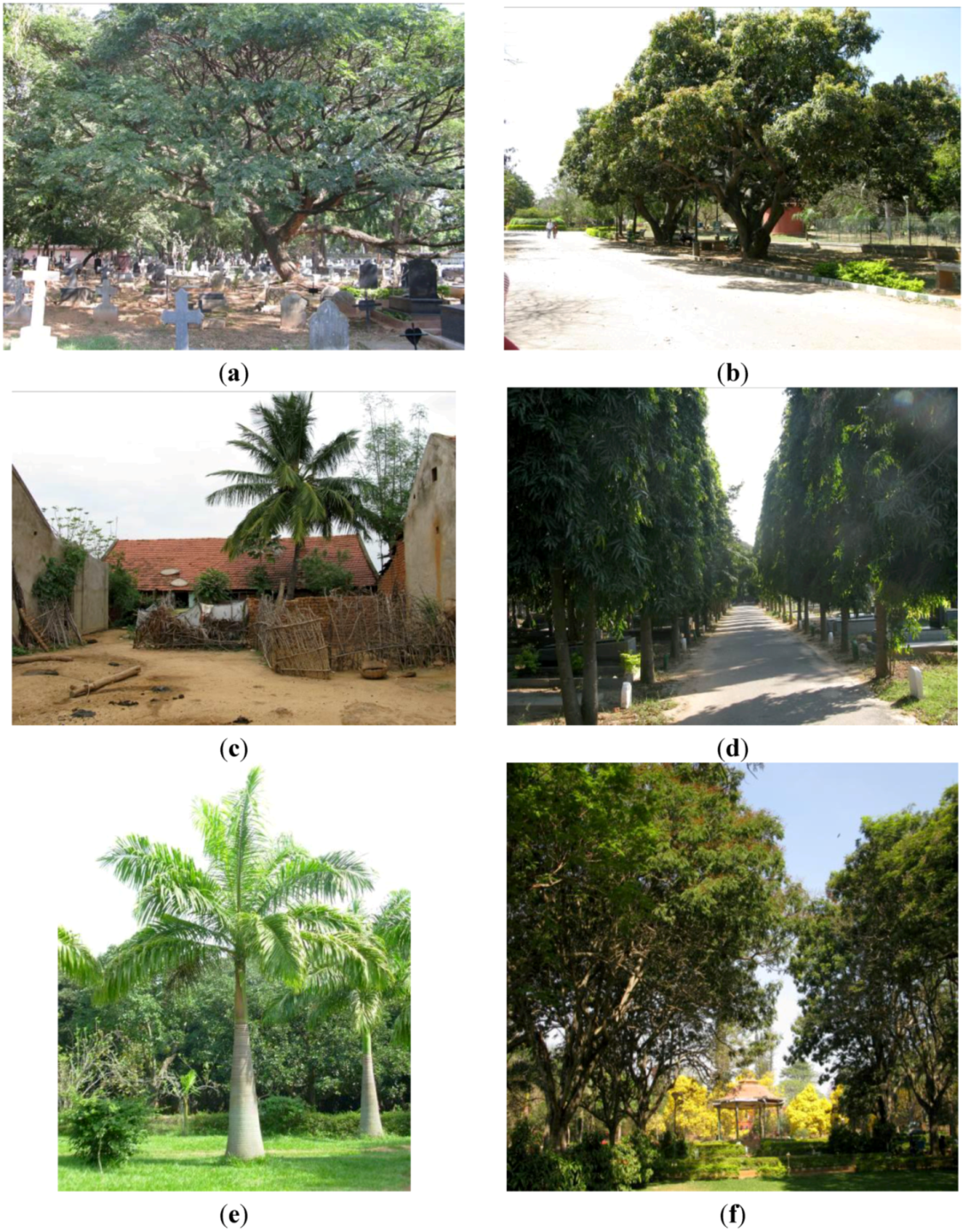
23], but of which only two—the mango and the coconut—are native to this region. These six species are quite different in size, canopy area and appearance, with the rain tree and copper pod capable of growing to giant sizes that can cover several hundred meters squared in area, mango trees of intermediate size and the mast tree, coconut and royal palm being relatively narrow canopied species (
Figure 3).
Table 1 presents the range in band reflectance values for each tree species.
Results of a non-parametric Mann-Whitney U test (
Table 2) show that all pairs of species are significantly separable based on reflectance values in at least one band, indicating the scope for using this image to differentiate between this set of six common species. The species pair that is least separable in terms of spectral values is the mango and the coconut, which differ only in reflectance values for band 4. In contrast, copper pod seems to be quite different spectrally from most other species, with significant differences in reflectance values for all four bands compared to the mango, coconut and royal palm, although it is somewhat more similar to the rain tree, differing significantly in reflectance values for bands 2 and 4 only. It is interesting to observe that the coconut and the royal palm, both types of palms, are not very similar in spectral values, as may have been expected. Indeed, while mango trees appear quite similar to the coconut spectrally, as discussed above, they differ significantly from the royal palm in reflectance values across all four bands.
Figure 3.
Profile photographs of six common tree species in Bangalore (photograph of royal palm by Divya Gopal; all other photographs by Harini Nagendra). (a) Samanea saman (rain tree); (b) Mangifera indica (mango); (c) Cocos nucifera (coconut); (d) Polyalthia longifolia (mast tree); (e) Roystonea regia (royal palm); (f) Peltophorum pterocarpum (copper pod).
Figure 3.
Profile photographs of six common tree species in Bangalore (photograph of royal palm by Divya Gopal; all other photographs by Harini Nagendra). (a) Samanea saman (rain tree); (b) Mangifera indica (mango); (c) Cocos nucifera (coconut); (d) Polyalthia longifolia (mast tree); (e) Roystonea regia (royal palm); (f) Peltophorum pterocarpum (copper pod).
Table 2.
Results of a Mann-Whitney U test to assess the statistical significance of differences in band reflectance values between pairs of tree species (* indicates significance at p < 0.05). As this is a symmetrical matrix of pair-wise comparisons, only one part of the matrix is shown.
Table 2.
Results of a Mann-Whitney U test to assess the statistical significance of differences in band reflectance values between pairs of tree species (* indicates significance at p < 0.05). As this is a symmetrical matrix of pair-wise comparisons, only one part of the matrix is shown.
| Species | Samanea saman vs. | Mangifera indica vs. | Cocos nucifera vs. | Polyalthia longifolia vs. | Roystonea regia vs. | Peltophorum pterocarpum vs. |
|---|
| Mangifera indica | Band 1 * | --- | --- | --- | --- | --- |
| Band 2 |
| Band 3 * |
| Band 4 * |
| Cocos nucifera | Band 1 * | Band 1 | --- | --- | --- | --- |
| Band 2 | Band 2 |
| Band 3 * | Band 3 |
| Band 4 * | Band 4 * |
| Polyalthia longifolia | Band 1 * | Band 1 | Band 1 | --- | --- | --- |
| Band 2 | Band 2 * | Band 2 * |
| Band 3 * | Band 3 * | Band 3 |
| Band 4 * | Band 4 | Band 4 * |
| Roystonea regia | Band 1 * | Band 1 * | Band 1 * | Band 1 | --- | --- |
| Band 2 | Band 2 * | Band 2 * | Band 2 |
| Band 3 * | Band 3 * | Band 3 * | Band 3 |
| Band 4 * | Band 4 * | Band 4 | Band 4 * |
| Peltophorum pterocarpum | Band 1 | Band 1 * | Band 1 * | Band 1 * | Band 1 * | --- |
| Band 2 * | Band 2 * | Band 2 * | Band 2 * | Band 2 * |
| Band 3 | Band 3* | Band 3 * | Band 3 * | Band 3 * |
| Band 4 * | Band 4 * | Band 4 * | Band 4 * | Band 4 * |
Classification accuracies for pixel-based classification was, in general, lower than that achieved using object-based classification approaches, as can be seen from
Table 3 below. The producer’s accuracy, provided for each class, represents the likelihood that a certain pixel or object belonging to a given species on the ground is classified correctly in the map, while the user’s accuracy represents the likelihood that a pixel or object classified as a specific species on the map really belongs to this species in the field. The Kappa statistic reflects the difference between the actual accuracy of the map and that expected by chance alone, correcting for the number of categories (species) used in classification and their relative distribution [
32]. In particular, our results indicate that for species with small-sized canopies, such as coconut, royal palm and mast tree, the producer’s accuracy for pixel-based classification was very low. This could be because of the extremely small, fragmented pixel coverage that is generated for all species, leading to error in location of pixels corresponding to this species, whereas object-oriented classification is able to compensate for this, leading to much improved classification accuracies across all species (
Table 3).
Table 3.
Summary of accuracy assessment results for pixel-based and object-based classifications.
Table 3.
Summary of accuracy assessment results for pixel-based and object-based classifications.
| | Pixel-Based Classification | Object-Based Classification |
|---|
| Producer’s Accuracy | User’s Accuracy | Kappa | Producer’s Accuracy | User’s Accuracy | Kappa |
|---|
| Samanea saman | 77.8% | 70.0% | 0.61 | 87.5% | 82.4% | 0.78 |
| Mangifera indica | 25% | 20% | 0.11 | 75% | 85.7% | 0.84 |
| Cocos nucifera | 0% | 0% | −0.13 | 83.3% | 90.9% | 0.89 |
| Polyalthia longifolia | 42.9% | 66.7% | 0.59 | 91.7% | 91.7% | 0.90 |
| Roystonea regia | 14.3% | 50.0% | 0.45 | 100% | 88.9% | 0.88 |
| Peltophorum pterocarpum | 75% | 36% | 0.24 | 91.7% | 84.6% | 0.82 |
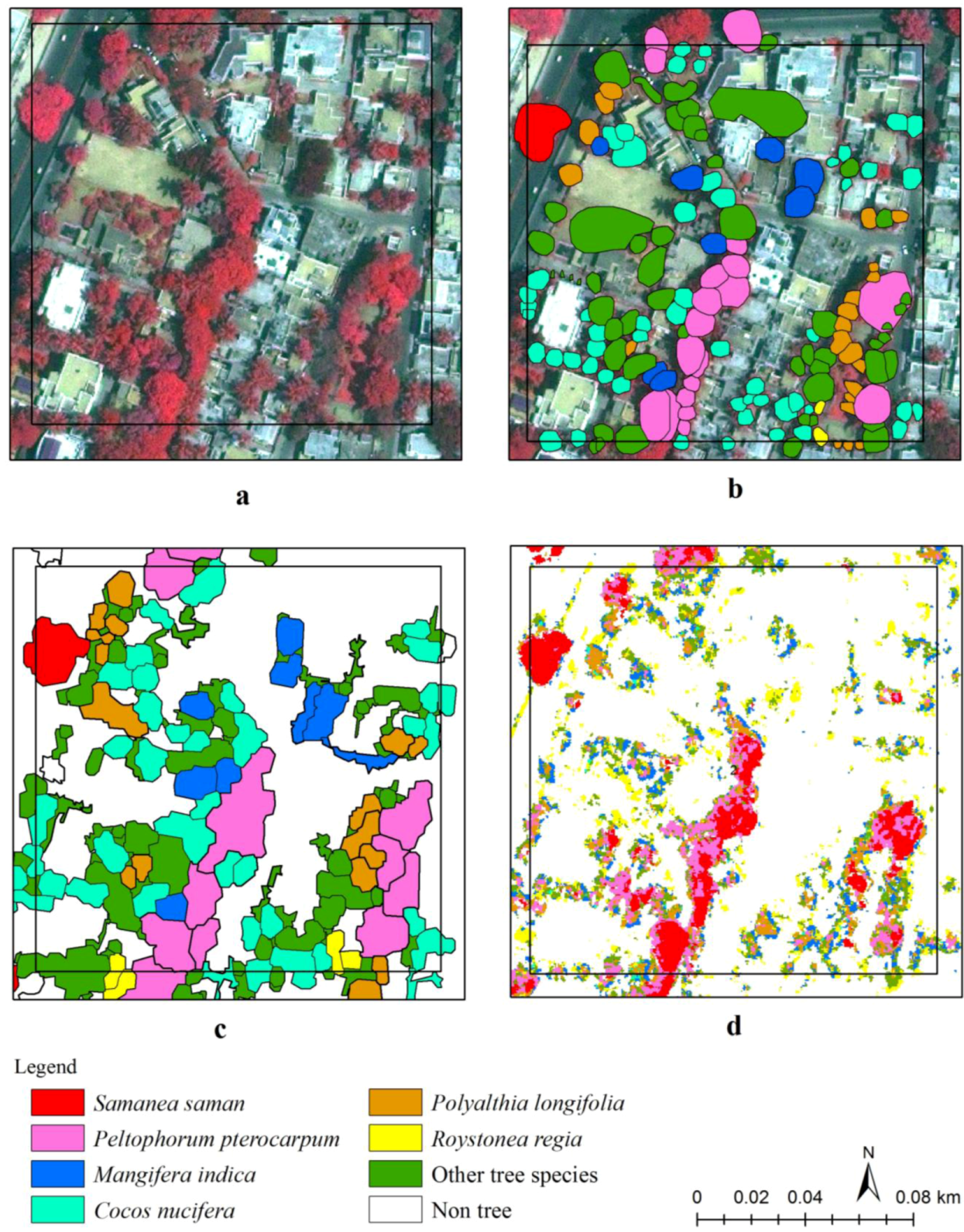
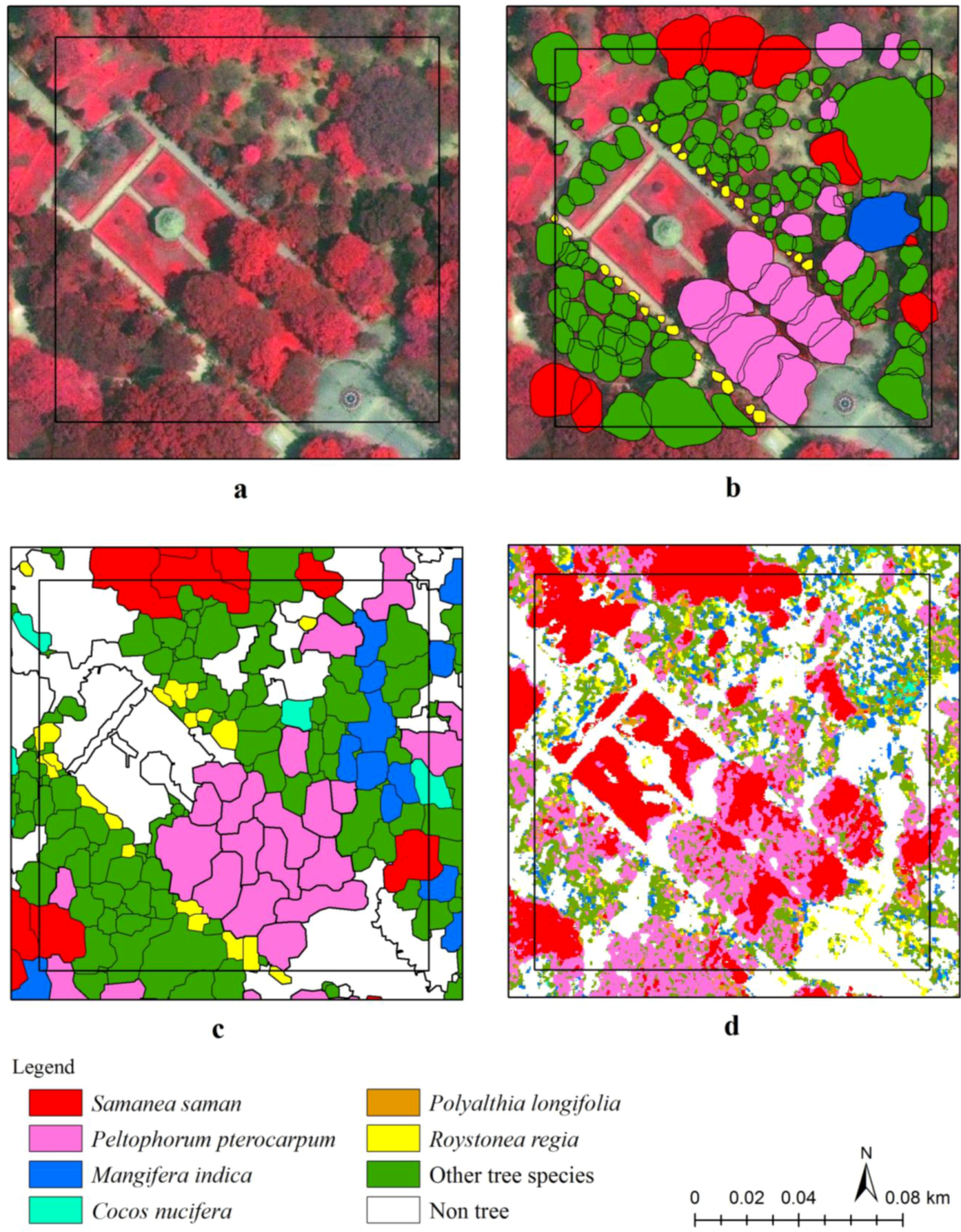
Classification achieved through pixel-based and object-based approaches can also be compared visually.
Figure 4 below provides a snapshot comparison of the accuracy of classification for different approaches to classification for a tree-rich and species-rich grid sampled in one of Bangalore’s oldest gardens, the Cubbon Park [
29]. This grid represents a context that is extremely challenging for mapping, with trees of different ages, belonging to different species, with widely differing canopy sizes and with multiple overlapping canopies. As can be seen from this image, pixel-based classification provides an extremely fragmented picture of tree cover, whereas object-based classification provides a map that is much closer to reality, though still far from identical with the situation on the ground. Pixel-based supervised classification does not enable the separation of grass from tree cover, as can be observed in the upper half of the central titled row—the approach of segmentation based on band values utilized in object-oriented classification appears to be more useful and can also be implemented within the pixel-based algorithm at an earlier stage. Object-based classification seems incapable in particular of handling very large canopies, such as that observed in the top right hand corner of the plot or the copper pod canopies along the lower half of the central tilted row in the grid.
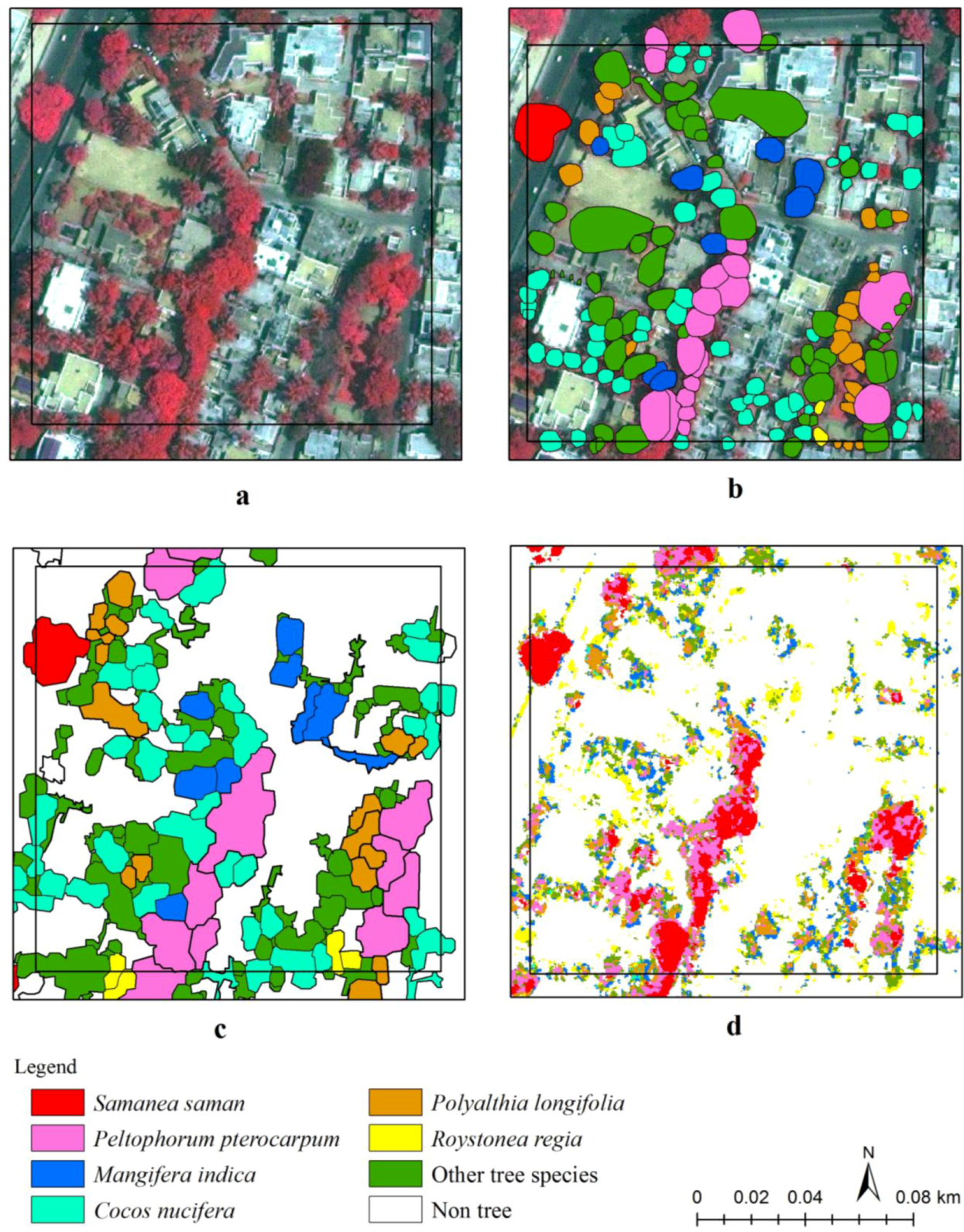
Figure 5 above compares the classifications for a grid in a residential neighborhood dominated by trees and houses, with smaller sized trees arranged in a relatively simpler pattern. Pixel-based classification continues to provide a rather fragmented picture of tree cover, although improved from the grid depicted in
Figure 4, possibly because of the relative similarity in tree canopy sizes and the lesser degree of overlap between trees within this grid. Pixel-based supervised classification does not enable the separation of grass from tree cover, as can be observed in the upper half of the central titled row. In this grid, tree classification seems to have expanded to include shrub and bush cover within homes, artificially increasing the size of many tree canopies. These examples from different situations and land use types provide a pictorial representation of these different approaches, in addition to the statistics on band separability and classification accuracy presented in
Table 1,
Table 2.
Figure 4.
(a) False color composite of a grid cell in Cubbon Park. (b) Tree species mapped from ground survey. (c) Tree species mapped using object-based approach. (d) Tree species mapped using pixel-based approach.
Figure 4.
(a) False color composite of a grid cell in Cubbon Park. (b) Tree species mapped from ground survey. (c) Tree species mapped using object-based approach. (d) Tree species mapped using pixel-based approach.
Figure 5.
(a) False color composite of a grid cell along a residential neighborhood. (b) Tree species mapped from ground survey. (c) Tree species mapped using object-based approach. (d) Tree species mapped using pixel-based approach.
Figure 5.
(a) False color composite of a grid cell along a residential neighborhood. (b) Tree species mapped from ground survey. (c) Tree species mapped using object-based approach. (d) Tree species mapped using pixel-based approach.
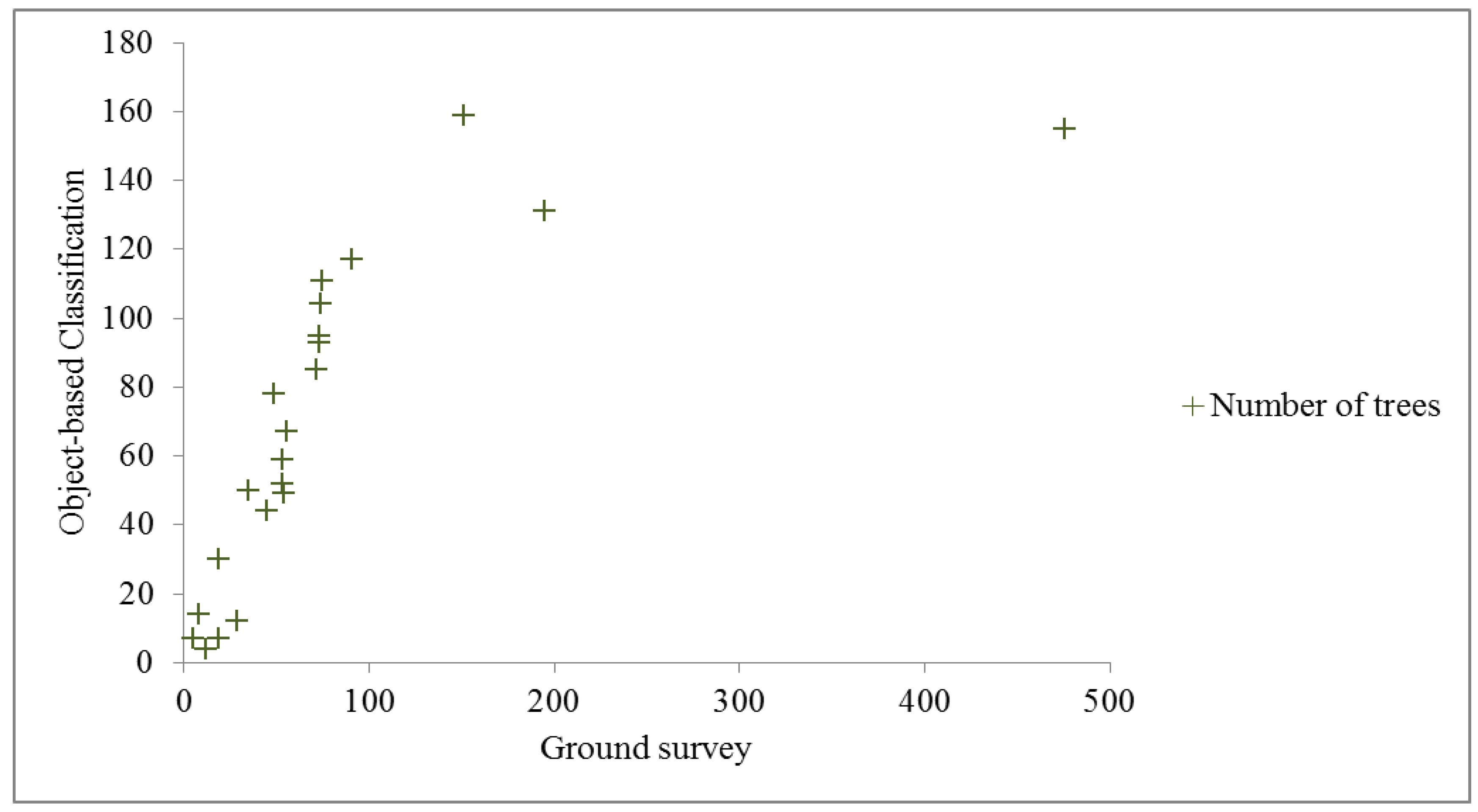
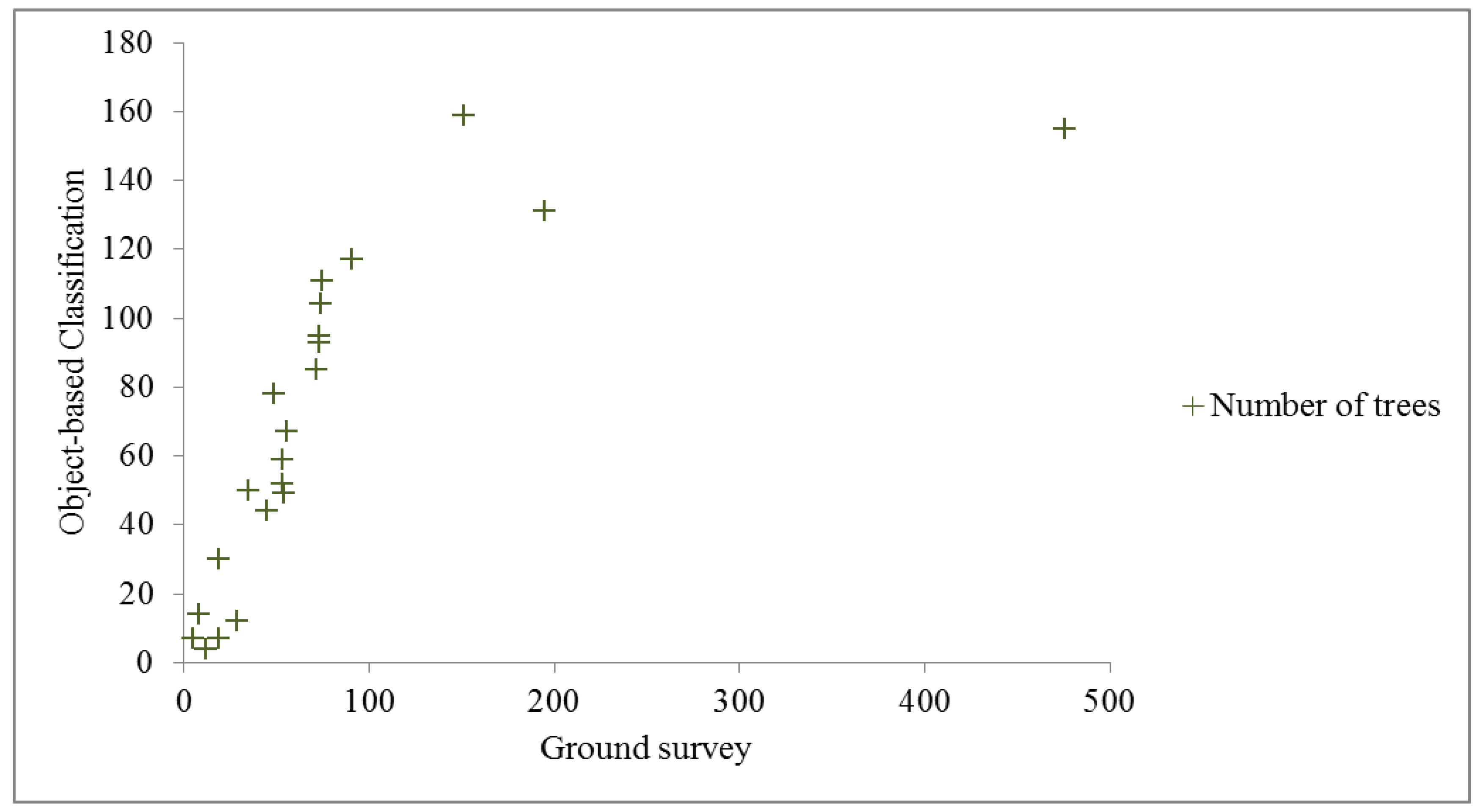
Figure 6 below depicts the correlation between the number of trees assessed in the ground survey and from object-based classification approaches. Apart from one outlier grid, with a very large number of trees on the ground (476 trees, including 362 royal palms, which the object-based classification could not correctly map), the correlation between the number of trees was very high, with a highly significant (
p < 0.001) Pearson’s
r of 0.89. The number of instances of over-estimation (13) and under-estimation (eight) of tree numbers were not appreciably different, indicating no consistent bias. The object-based approach estimates the number of trees occurring within the 2 km circle around the Bangalore city center to be 31,430,
i.e., 25 trees per hectare. This density appears within the range observed by other field research in parks and residential areas in the city [
23,
24], indicating the potential of object-based classification for tree monitoring in this data-poor urban context. The approach of segmentation based on band values utilized in object-oriented classification appears to be more useful and can also be implemented within the pixel-based algorithm at an earlier stage.
Figure 6.
Correlation between number of trees assessed in the ground survey of 21 grids and the number of trees calculated from object-based classification.
Figure 6.
Correlation between number of trees assessed in the ground survey of 21 grids and the number of trees calculated from object-based classification.
In summary, the six most dominant tree species encountered in our study sample exhibited statistically significant differences in spectral signatures in at least one image reflectance band, with the infra-red band (band 4) appearing to hold the greatest potential for discrimination (
Table 2). Despite this, pixel-based classifications were difficult to apply, due to issues of high pixel heterogeneity, giving rise to skewed non-normal species signatures. Species with small-sized canopies,
i.e., coconut, royal palm and mast trees, were most difficult to classify, with particularly low accuracies, although two large crowned species—copper pod and rain tree—with distinctive spectral signatures (
Table 1,
Table 2), were possible to classify with reasonably high classification accuracies (
Table 3). Object-based classification improved on this approach, producing consistently superior classifications, as other studies have previously demonstrated [
15], with a satisfactory depiction of the overall spatial pattern of species canopy distributions (
Table 3,
Figure 4,
Figure 5). Object-based classification was also able to report the number of tree canopies with a reasonably high accuracy, without any perceptible bias in terms of over- or under-reporting tree densities, in comparison to other previously developed approaches for tree canopy mapping using hyperspatial imagery (e.g., [
12]).
5. Conclusions
The south Indian city of Bangalore, once known for its green cover, has witnessed large-scale tree felling in recent years, due to rapid expansion [
20,
28]. Despite widespread protests about tree felling, it has been difficult to develop an accurate sense of the scale of the issue, due to a severe lack of accurate basic information, such as the numbers of felled trees, their location and species identity [
20,
22]. Given the lack of an accurate, updated manual database, there is a need for utilizing other semi-automated approaches for tree mapping and monitoring. The research described here assesses the utility of very high spatial resolution satellite imagery for such monitoring in urban environments, which represent a challenging context for mapping. Urban green areas are critical for their ability to provide sustained ecosystem services, including biodiversity support and carbon sequestration, yet their importance is largely ignored by planners and administrators, particularly in developing cities [
34].
As anticipated, we found significant challenges in utilizing very high spatial resolution satellite imagery for tree species mapping and density estimation in the human-influenced urban context of Bangalore, India. The intermingling of species not commonly found together in native habitats, consequent heterogeneity of tree sizes and overlapping of canopies in many locations makes it challenging to define a set of rules that can be applied for pixel-based or object-based classification across different urban locations.
Object-based classification appears to have high potential for monitoring changes in tree species distribution and tree felling in this highly data-poor, dynamic and fast developing city, which urgently requires better information on tree distribution for monitoring and management. Classical per-pixel classifiers rely solely on spectral differences between tree species for classification, whereas object-based approaches are able to build on spectral information and, in addition, exploit differences in species morphology, such as the different canopy size and shape of different species, to produce significantly improved classifications [
15]. For this, as with all remote sensing studies [
35], ground-truthing is extremely critical—information from field surveys on canopy size and shape form an essential foundation required for object-based classification in this instance.
The results reported here will be of relevance to other cities across the world, where similar mapping and species delineation across green patches is required in order to provide information essential to informed planning for sustainability [
36]. Such information is required to plan tree planting programs, for instance, to identify gaps in tree cover that require intervention [
37], to relate information on land management with tree biodiversity [
38], to assess the impact of housing density and developmental history on tree performance [
39] or to map urban tree canopies accurately and cost-effectively, for instance, as required in cities dealing with pest attacks on trees [
40].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}