
Map-Aided Indoor Positioning Algorithm with Complex Deployed BLE Beacons


Abstract
:1. Introduction
2. Related Research
3. Research Method
3.1. Overview
| Algorithm 1 Proposed localization algorithm. |
|
3.2. Establish-Library
3.2.1. Cell Area Division
Map Information
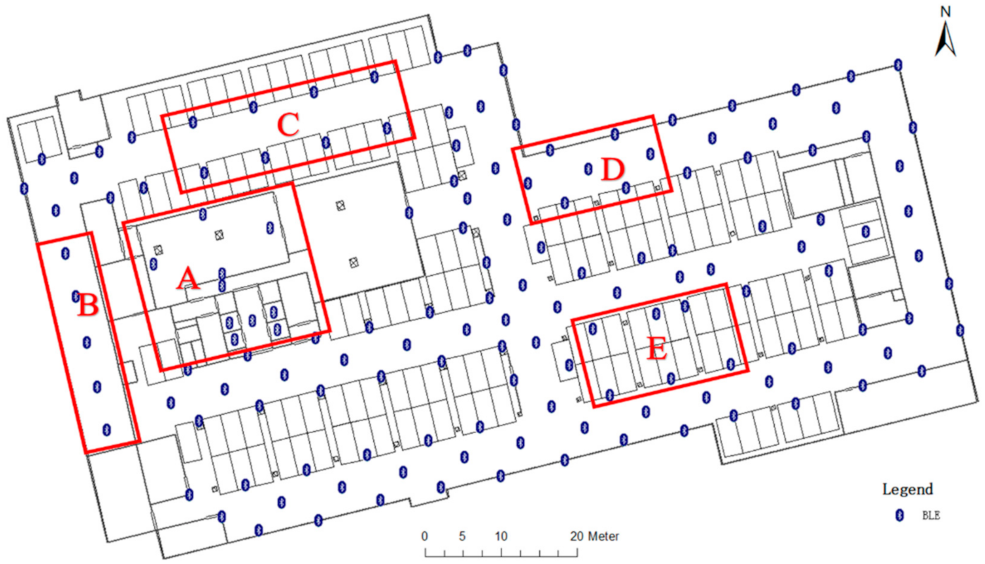
- To divide beacons base on the cell area. According to the boundary information of the physical area in the map, beacons are divided into their physical area. Combining wall constraints to further split the physical area into multiple virtual areas.
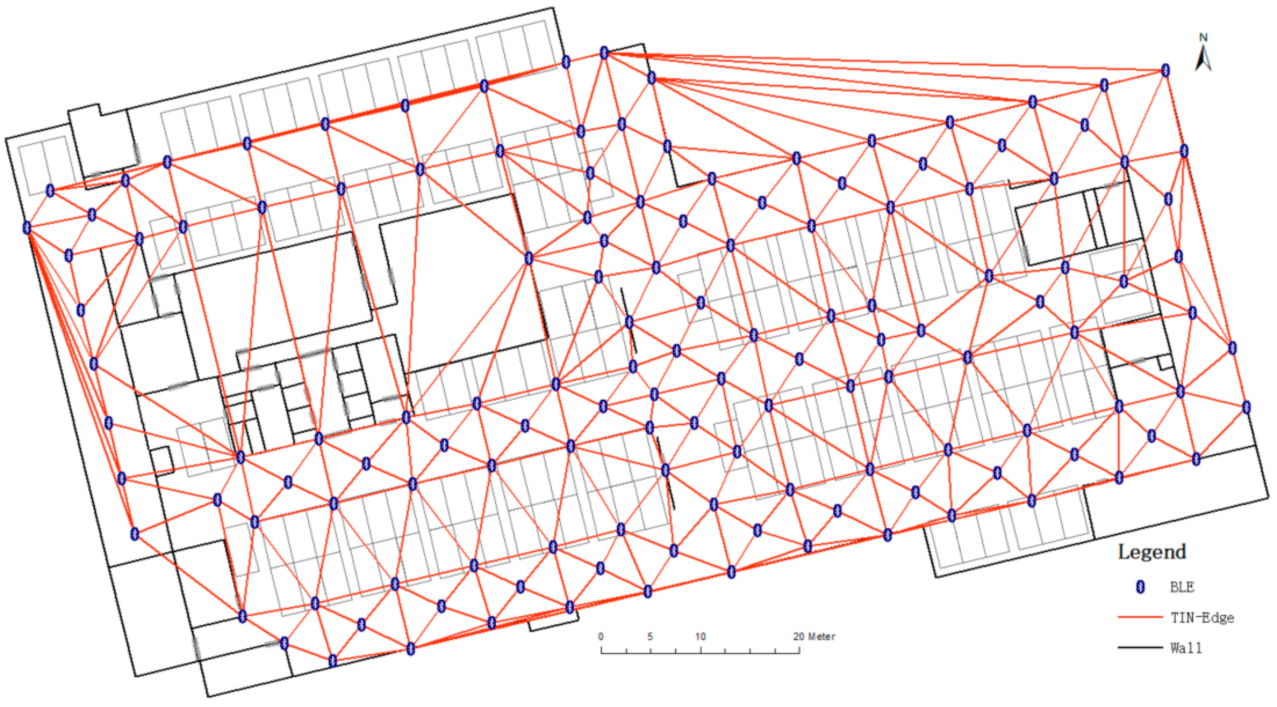
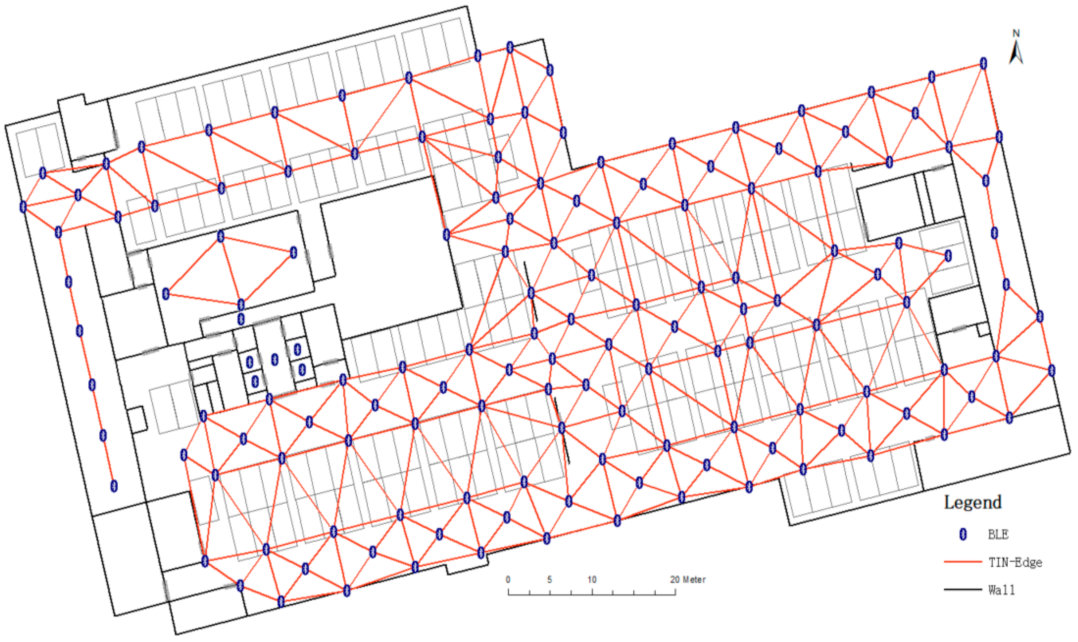
- To establish precise spatial connections between BLE. Combined with restriction information such as walls, it can be judged whether the connection of each beacon is reasonable, and the distribution density and structure of the beacons can be calculated.
Physical Area
Virtual Area
3.2.2. Optimal Combination of Beacons
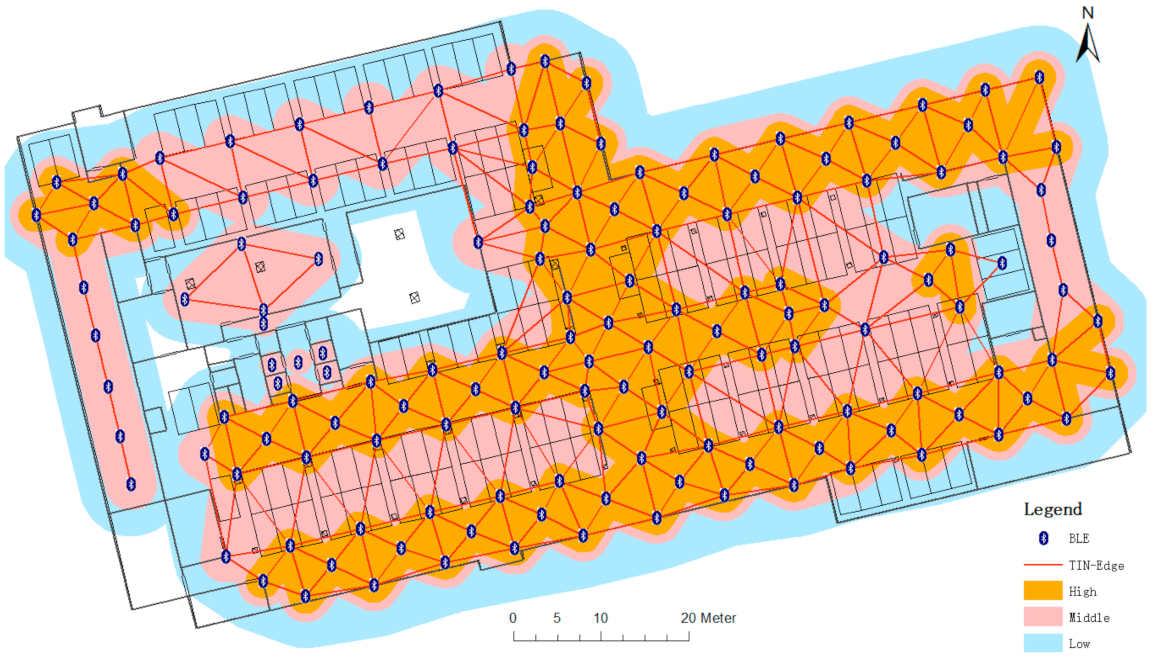
3.2.3. Hierarchical Spatial Signal Coverage
3.3. Positioning
3.3.1. Recognize the Cell Area
- Point-index: the beacon with the largest RSSI of LM-4 is used as the point-index to the area with the single optimal beacon;
- Edge-index: two beacons of the LM-4 are used to form the edge-index of the area with multiple optimal beacons.
- Single optimal beacon: the largest RSSI of LM-4 is greater than the threshold value −75, and is significantly larger than the second-largest RSSI;
- Multiple optimal beacons: match_ratio (LO, LM-4) > 0.75, That is, at least 3 beacons of LO are in LM-4, if the beacon’s number of LO is less than 4, all of them need to be matched.
3.3.2. Preferred Reference Beacons
- Good: match_ratio (LO, LM-4) = 1, LM-4 contains all the beacons of LO, indicating that the signal of these beacons is relatively stable;
- Fair: match_ratio (LO, LM-4) < 1 and match_ratio (LO, LM-8) = 1, LM-4 does not contain all the beacons of LO, and LM-8 contains all the beacons of LO, indicating that the signal of these beacons is generally stable;
- Poor: match_ratio (LO, LM-8) < 1, LM-8 does not contain all the beacons of LO, indicating that the signal of these beacons may have large noise.
3.3.3. Positioning and Evaluation
| Algorithm 2 Proposed localization algorithm with optimal beacons. |
| Input: LM-N and the library of optimal beacon combination Output: and |
|
4. Experiment and Result
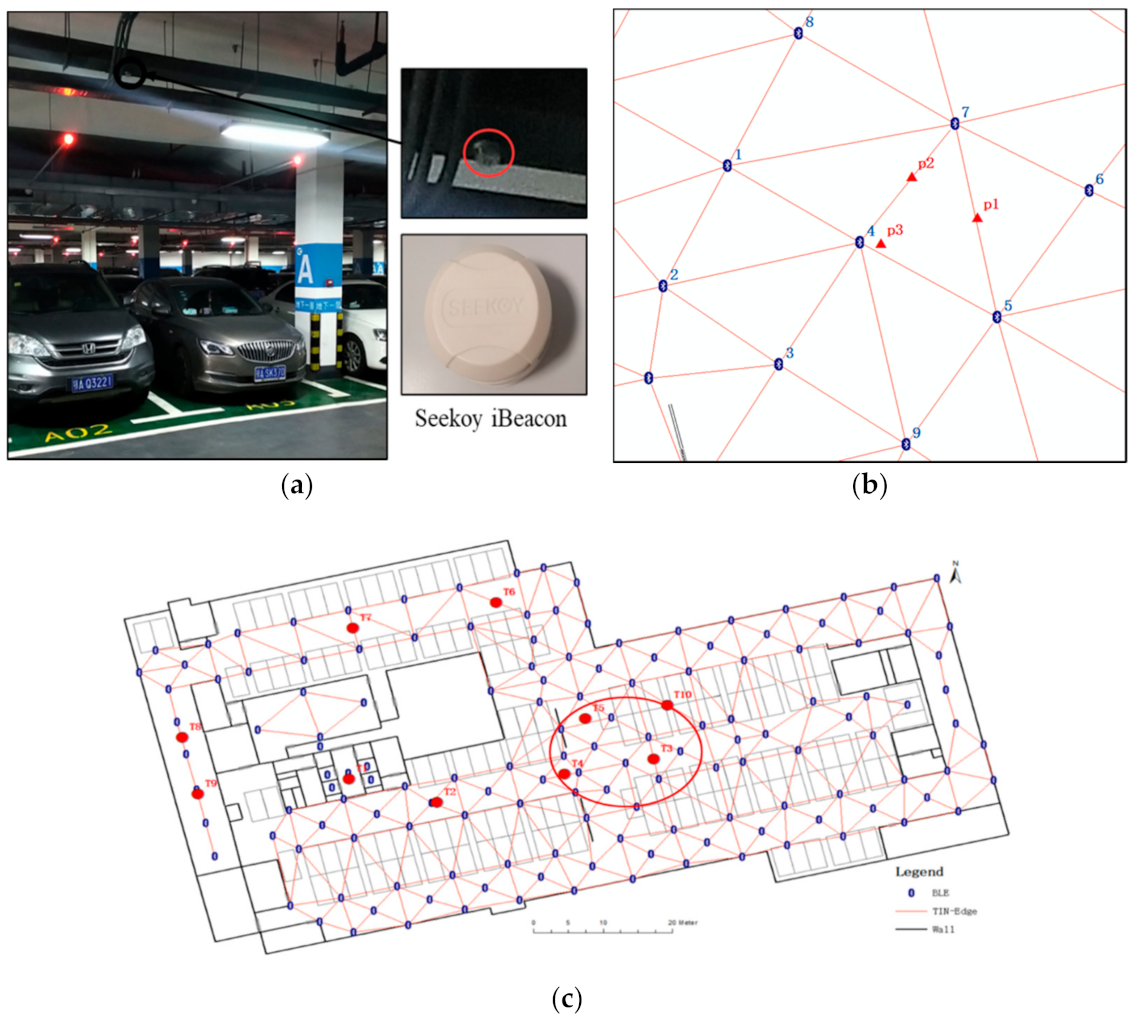
4.1. Experimental Setup
4.2. Area Recognition Results
4.3. Preferred Beacons and Positioning
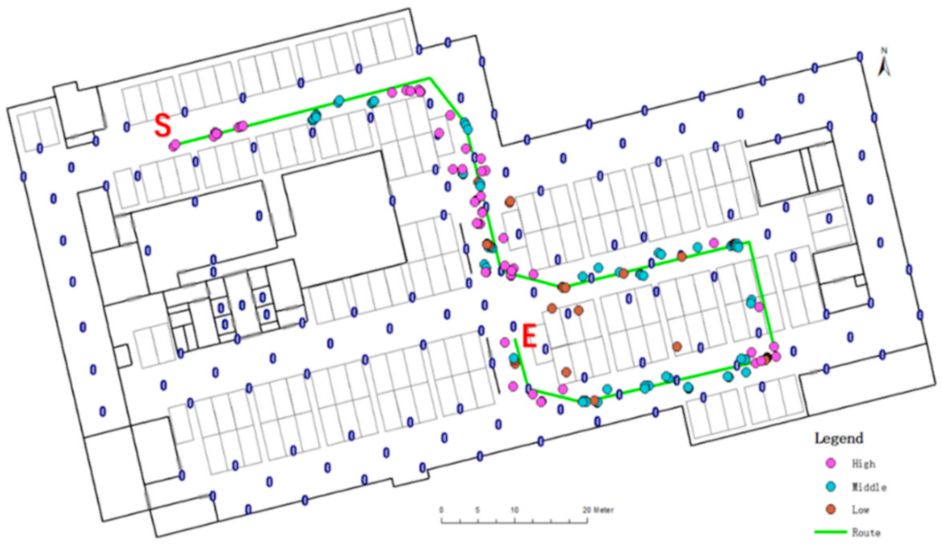
4.4. Dynamic Positioning Case
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A hybrid smartphone indoor positioning solution for mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.Y. A survey of smartphone-based indoor positioning system using RF-based wireless technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef]
- Wang, S.S. A BLE-based pedestrian navigation system for car searching in indoor parking garages. Sensors 2018, 18, 1442. [Google Scholar] [CrossRef]
- Stavrou, V.; Bardaki, C.; Papakyriakopoulos, D.; Pramatari, K. An ensemble filter for indoor positioning in a retail store using Bluetooth low energy beacons. Sensors 2019, 19, 4550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kunhoth, J.; Karkar, A.G.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum. Centric Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Palumbo, F.; Barsocchi, P.; Chessa, S.; Augusto, J.C. A stigmergic approach to indoor localization using Bluetooth low energy beacons. In Proceedings of the 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015; IEEE Publications: Piscataway, NJ, USA, 2015; Volume 2015, pp. 1–6. [Google Scholar]
- Rida, M.E.; Liu, F.; Jadi, Y.; Algawhari, A.A.A.; Askourih, A. Indoor location position based on Bluetooth signal strength. In Proceedings of the 2nd International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015; IEEE Publications: Piscataway, NJ, USA, 2015; Volume 2015, pp. 769–773. [Google Scholar]
- Zhu, J.; Luo, H.; Chen, Z.; Li, Z. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; IEEE Publications: Piscataway, NJ, USA, 2014; Volume 2014, pp. 526–533. [Google Scholar]
- Klepal, M.; Beauregard, S. A backtracking particle filter for fusing building plans with PDR displacement estimates. In Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008; IEEE Publications: Piscataway, NJ, USA, 2008; Volume 2008, pp. 207–212. [Google Scholar]
- Davidson, P.; Collin, J.; Takala, J. Map-aided autonomous pedestrian navigation system. In Proceedings of the 18th International Conference Integrated Navigation Systems, Saint Petersburg, Russia, 30 May–1 June 2011; pp. 314–318. [Google Scholar]
- Nurminen, H.; Ristimäki, A.; Ali-Löytty, S.; Piché, R. Particle filter and smoother for indoor localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; IEEE Publications: Piscataway, NJ, USA, 2013; pp. 1–10. [Google Scholar]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Integrating low cost IMU with building heading in indoor pedestrian navigation. JGPS 2011, 10, 30–38. [Google Scholar] [CrossRef] [Green Version]
- Davidson, P.; Kirkko-Jaakkola, M.; Collin, J.; Takala, J. Navigation algorithm combining building plans with autonomous sensor data. Gyroscopy Navig. 2015, 6, 188–196. [Google Scholar] [CrossRef]
- Gilliéron, P.Y.; Büchel, D.; Spassov, I.; Merminod, B. Indoor navigation performance analysis. In Proceedings of the 8th European Navigation Conference GNSS, Rotterdam, The Netherlands, 17–19 May 2004. [Google Scholar]
- Koivisto, M.; Nurminen, H.; Ali-Loytty, S.; Piché, R. Graph-based map matching for indoor positioning. In Proceedings of the 10th International Conference on Information, Communications and Signal Processing (ICICS), Singapore, 2–4 December 2015; IEEE Publications: Piscataway, NJ, USA, 2015; Volume 2015, pp. 1–5. [Google Scholar]
- Yamamoto, D.; Tanaka, R.; Kajioka, S.; Matsuo, H.; Takahashi, N. Global map matching using BLE beacons for indoor route and stay estimation. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, DC, USA, 6–9 November 2018; pp. 309–318. [Google Scholar]
- Aomumpai, S.; Prommak, C. On the impact of reference node placement in wireless indoor positioning systems. Int. J. Electr. Comput. Eng. 2011, 5, 1704–1708. [Google Scholar]
- Orujov, F.; Maskeliūnas, R.; Damaševičius, R.; Wei, W.; Li, Y. Smartphone based intelligent indoor positioning using fuzzy logic. Future Gener. Comput. Syst. 2018, 89, 335–348. [Google Scholar] [CrossRef]
- Obreja, S.G.; Vulpe, A. Evaluation of an indoor localization solution based on Bluetooth low energy beacons. In Proceedings of the 13th International Conference on Communications (COMM), Bucharest, Romania, 18–20 June 2020; IEEE Publications: Piscataway, NJ, USA, 2020; Volume 2020, pp. 227–231. [Google Scholar]
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; IEEE Publications: Piscataway, NJ, USA, 2013; Volume 2013, pp. 837–842. [Google Scholar]
- Kaczmarek, M.; Ruminski, J.; Bujnowski, A. Accuracy analysis of the RSSI BLE SensorTag signal for indoor localization purposes fed. In Proceedings of the Conference on Computer Science and Information Systems (FedCSIS), Gdansk, Poland, 11–14 September 2016; IEEE Publications: Piscataway, NJ, USA, 2016; Volume 2016, pp. 1413–1416. [Google Scholar]
- Zhang, K.; Zhang, Y.; Wan, S. Research of RSSI indoor ranging algorithm based on Gaussian-Kalman linear filtering. In Proceedings of the IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; IEEE Publications: Piscataway, NJ, USA, 2016; Volume 2016, pp. 1628–1632. [Google Scholar]
- Mackey, A.; Spachos, P.; Song, L.; Plataniotis, K.N. Improving BLE beacon proximity estimation accuracy through Bayesian filtering. IEEE Internet Things J. 2020, 7, 3160–3169. [Google Scholar] [CrossRef] [Green Version]
- Lam, C.H.; Ng, P.C.; She, J. Improved distance estimation with BLE beacon using Kalman filter and SVM. In Proceedings of the IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; IEEE Publications: Piscataway, NJ, USA, 2018; Volume 2018, pp. 1–6. [Google Scholar]
- Rajagopal, N.; Chayapathy, S.; Sinopoli, B.; Rowe, A. Beacon placement for range-based indoor localization. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–8. [Google Scholar]
- Bulusu, N.; Heidemann, J.; Estrin, D. Adaptive beacon placement. In Proceedings of the 21st International Conference on Distributed Computing Systems, Mesa, AZ, USA, 16–19 April 2001; IEEE Publications: Piscataway, NJ, USA, 2001; pp. 489–498. [Google Scholar]
- Ng, P.C.; She, J.; Park, S. High resolution beacon-based proximity detection for dense deployment. IEEE Trans. Mob. Comput. 2017, 17, 1369–1382. [Google Scholar] [CrossRef]
- Juri, A.A.; Arslan, T.; Wang, F. Obstruction-aware Bluetooth low energy indoor positioning. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Oregon, Portland, 12–16 September 2016; pp. 2254–2261. [Google Scholar]
- Tomic, S.; Beko, M.; Dinis, R.; Dimic, G.; Tuba, M. Distributed RSS-based localization in wireless sensor networks with node selection mechanism. In Doctoral Conference on Computing, Electrical and Industrial Systems; Springer: Cham, Switzerland, 2015; pp. 204–214. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Al-Madani, B.; Orujov, F.; Maskeliūnas, R.; Wei, W.; Li, Y. Fuzzy logic type-2 based wireless indoor localization system for navigation of visually impaired people in buildings. Sensors 2019, 19, 2114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, K.; Nam, Y.; Min, S.D. An indoor localization solution using Bluetooth RSSI and multiple sensors on a smartphone. Multimedia Tool. Appl. 2018, 77, 12635–12654. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Yang, L.; Liu, T. Real-time indoor positioning approach using iBeacons and smartphone sensors. Appl. Sci. 2003, 10, 2003. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.S.; Ning, F.S. Low-cost indoor positioning application based on map assistance and mobile phone sensors. Sensors 2018, 18, 4285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W.; Marelli, D.; Fu, M. Dynamic Indoor Localization Using Maximum Likelihood Particle Filtering. Sensors 2021, 21, 1090. [Google Scholar] [CrossRef]
- Bhargava, N.; Bhargava, R.; Tanwar, P.S. Triangulated irregular network model from mass points. Int. J. Adv. Comput. Res. 2013, 3, 172. [Google Scholar]
- Sadowski, S.; Spachos, P. Optimization of BLE beacon density for RSSI-based indoor localization. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; IEEE Publications: Piscataway, NJ, USA, 2019; Volume 2019, pp. 1–6. [Google Scholar]
- Liang, S.C.; Liao, L.H.; Lee, Y.C. Localization algorithm based on improved weighted centroid in wireless sensor networks. J. Netw. 2014, 9, 183. [Google Scholar] [CrossRef]
- Chuku, N.; Pal, A.; Nasipuri, A. An RSSI based localization scheme for wireless sensor networks to mitigate shadowing effects. In Proceedings of the IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; IEEE Publications: Piscataway, NJ, USA, 2013; Volume 2013, pp. 1–6. [Google Scholar]
- Ganz, A.; Schafer, J.; Gandhi, S.; Puleo, E.; Wilson, C.; Robertson, M. PERCEPT indoor navigation system for the blind and visually impaired: Architecture and experimentation. Int. J. Telemed. Appl. 2012, 2012, 19. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cell Area | Polygon | Line | Point |
|---|---|---|---|
| R < 6 m | 3 | 2 | 2 |
| 6 ≤ R < 12 m | 2 | 1 | 1 |
| R ≥ 12 m | 1 | 1 | 1 |
| Good | Fair | Poor | |
|---|---|---|---|
| Score_match | 3 | 2 | 1 |
| Region Type | Matched |
|---|---|
| Room | 100% |
| Hall | 100% |
| Elevator | 100% |
| Large-area | 100% |
| Point | Matched | Other | None |
|---|---|---|---|
| p1 | 88% | 10% | 2% |
| p2 | 76% | 16% | 8% |
| p3 | 66% | 20% | 14% |
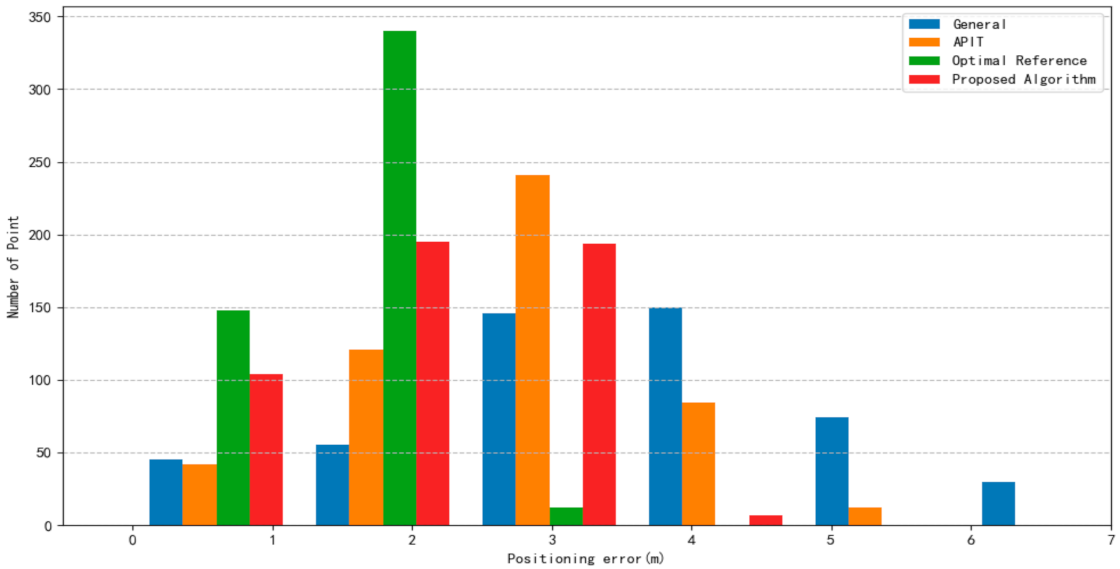
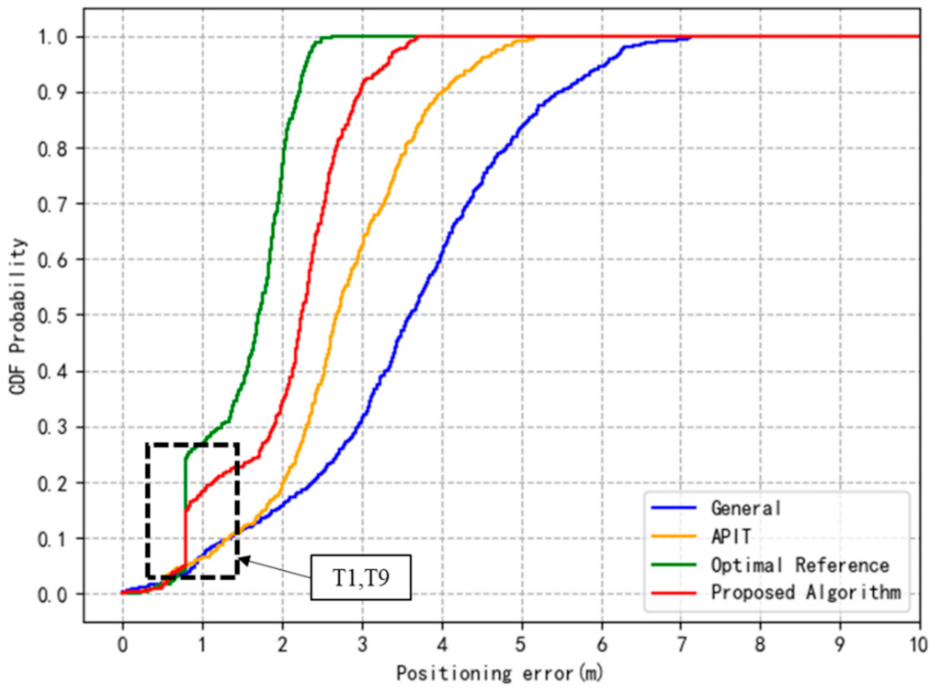
| Methods | Average Error (m) | Standard Deviation of Error (m) |
|---|---|---|
| General | 3.57 | 1.48 |
| APIT | 2.74 | 1.01 |
| Optimal Reference | 1.56 | 0.56 |
| Our method | 2.09 | 0.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Guo, W.; Zhu, X. Map-Aided Indoor Positioning Algorithm with Complex Deployed BLE Beacons. ISPRS Int. J. Geo-Inf. 2021, 10, 526. https://doi.org/10.3390/ijgi10080526
Liu W, Guo W, Zhu X. Map-Aided Indoor Positioning Algorithm with Complex Deployed BLE Beacons. ISPRS International Journal of Geo-Information. 2021; 10(8):526. https://doi.org/10.3390/ijgi10080526
Chicago/Turabian StyleLiu, Wuping, Wei Guo, and Xinyan Zhu. 2021. "Map-Aided Indoor Positioning Algorithm with Complex Deployed BLE Beacons" ISPRS International Journal of Geo-Information 10, no. 8: 526. https://doi.org/10.3390/ijgi10080526
APA StyleLiu, W., Guo, W., & Zhu, X. (2021). Map-Aided Indoor Positioning Algorithm with Complex Deployed BLE Beacons. ISPRS International Journal of Geo-Information, 10(8), 526. https://doi.org/10.3390/ijgi10080526