
Three-Dimensional Inundation Mapping Using UAV Image Segmentation and Digital Surface Model


Abstract
1. Introduction
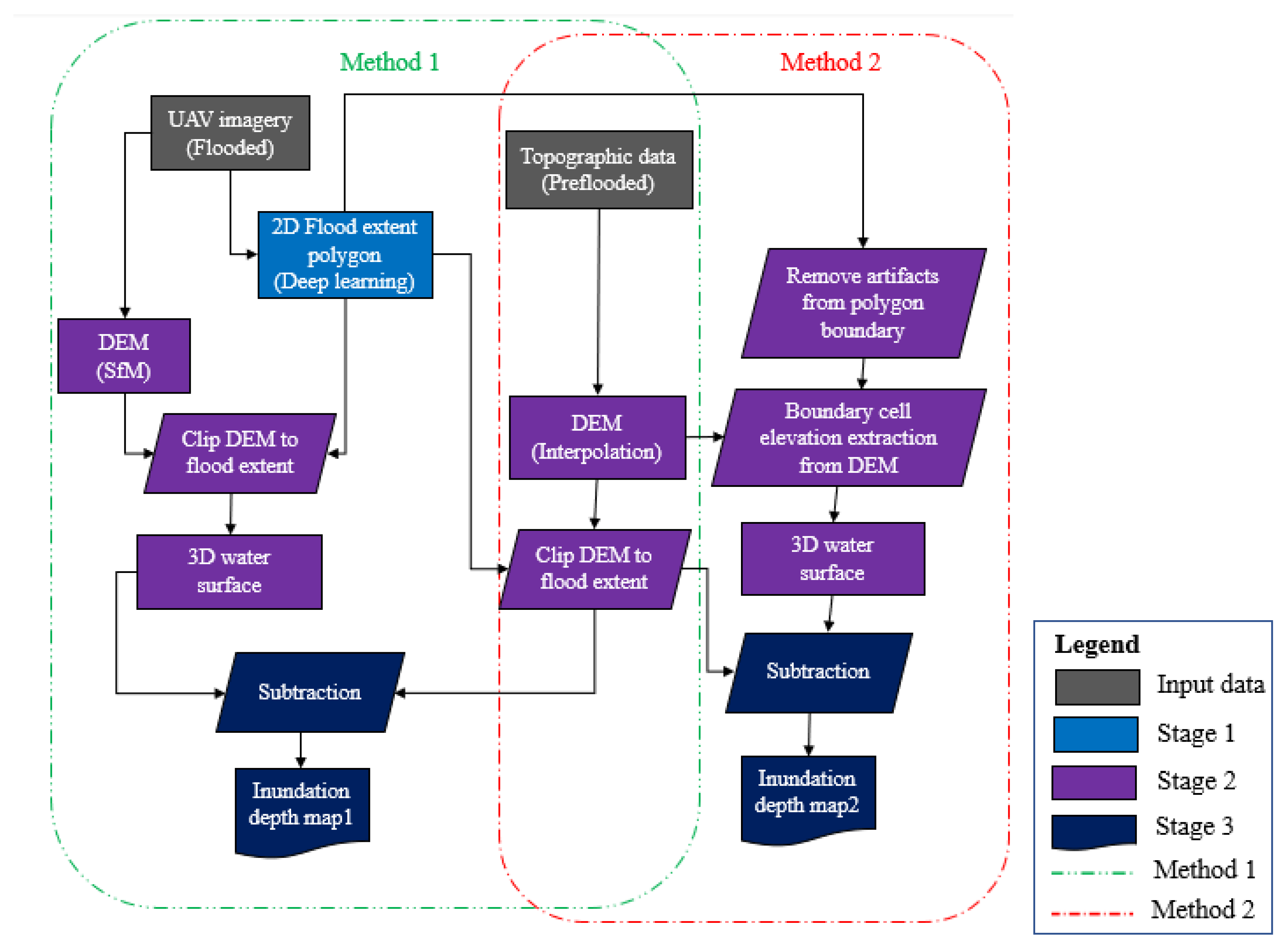
- Estimating floodwater depth by reconstructing 3D water surface using SfM and deep learning methods
- Estimating floodwater depth by reconstructing the 3D water surface using a deep learning method and spatial analysis of topography information.
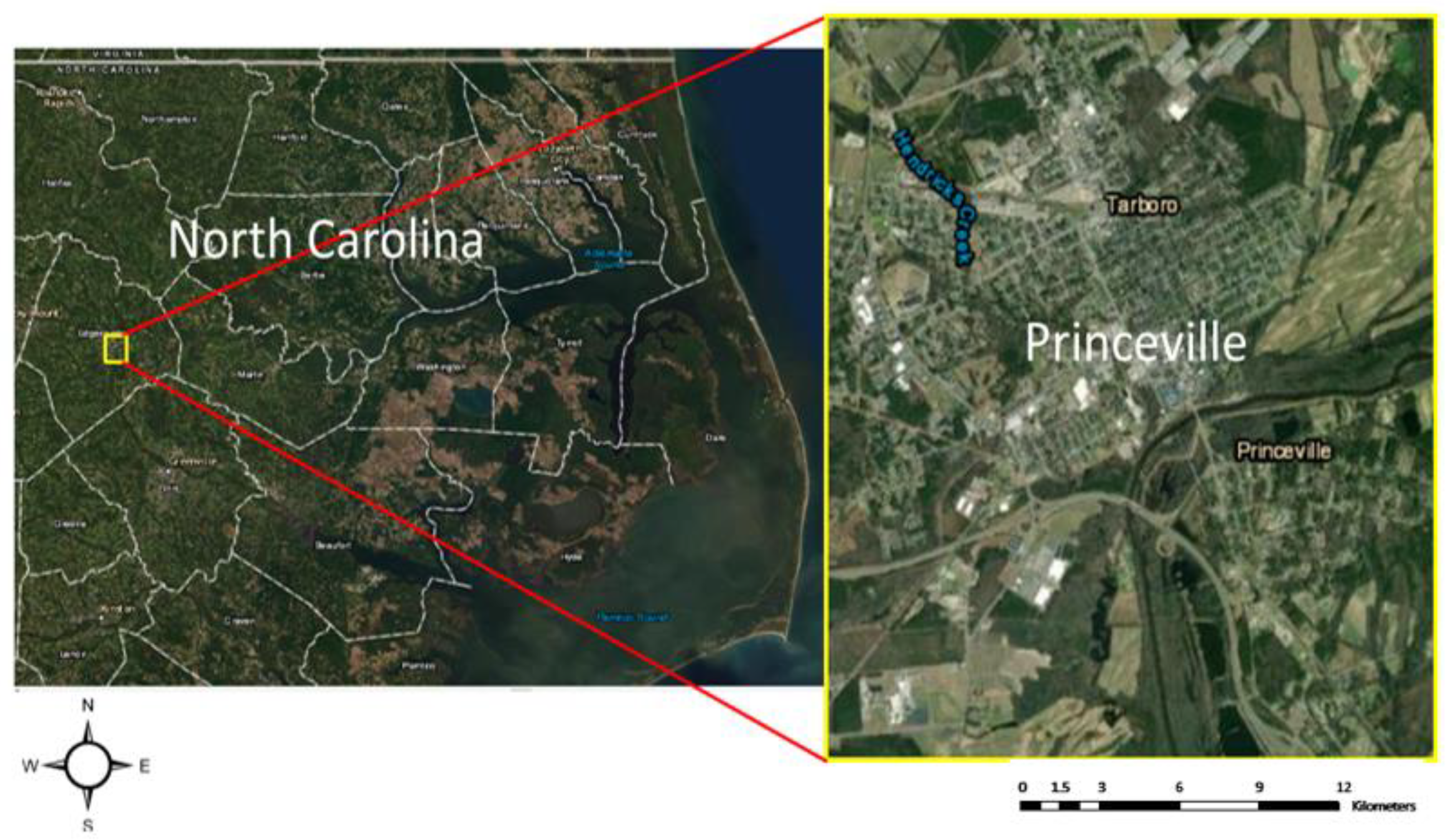
2. Study Area and Data
3. Methodology
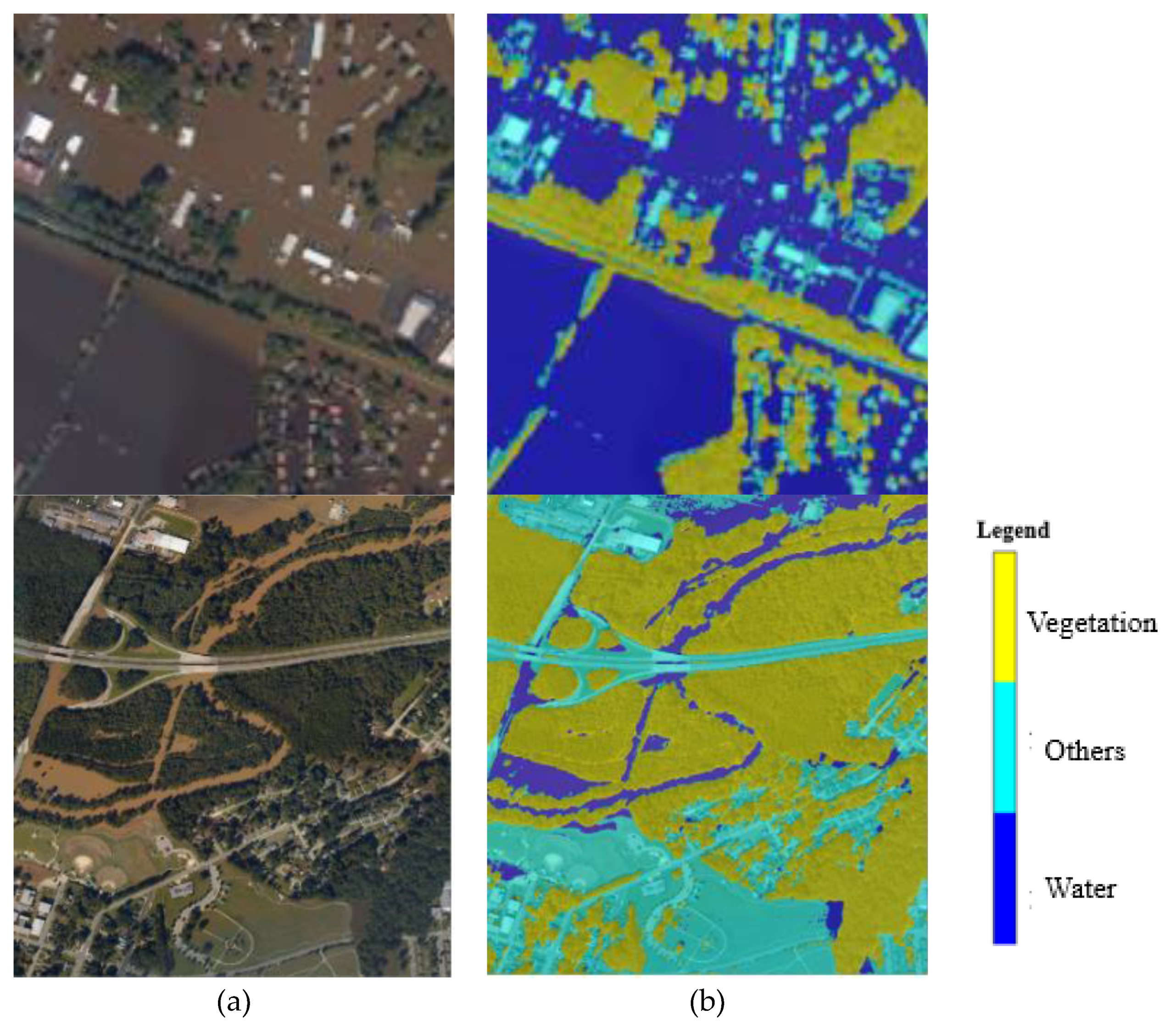
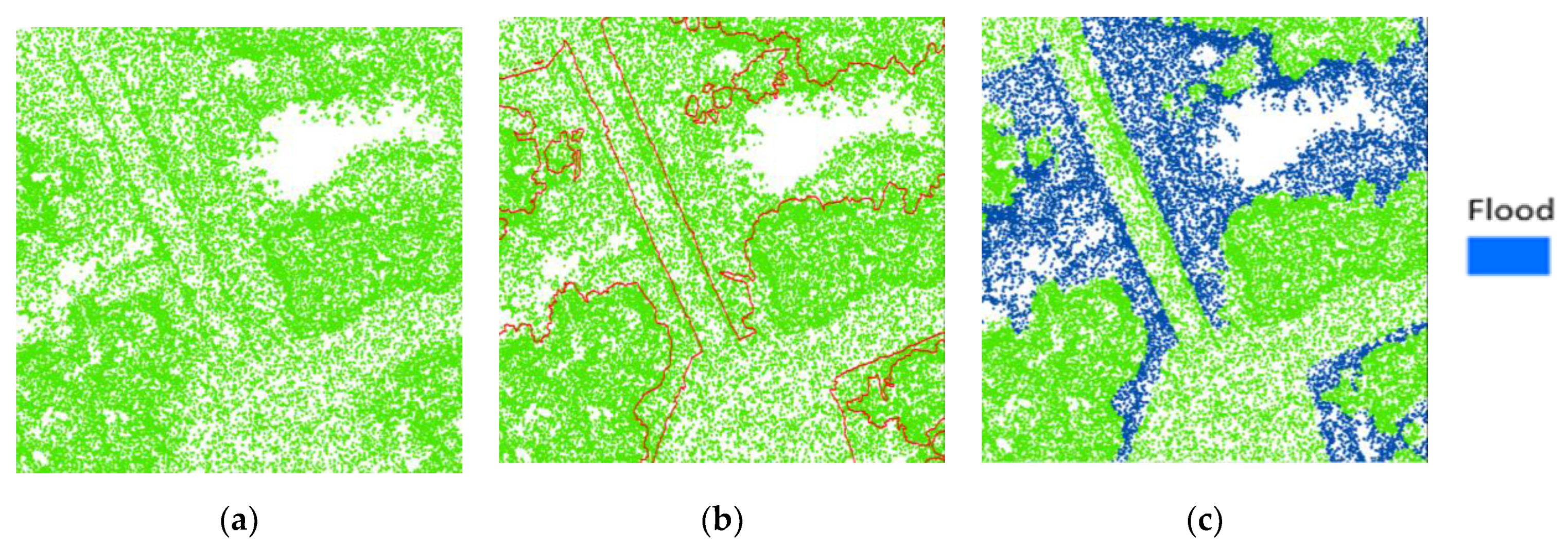
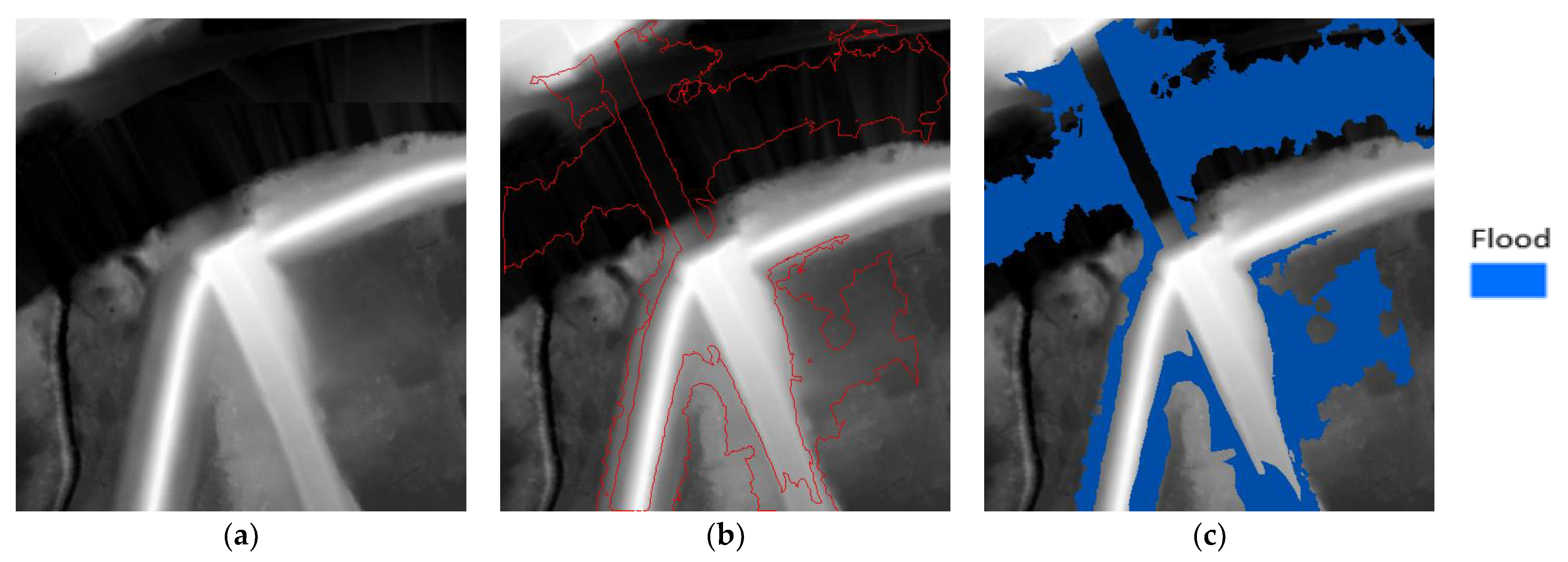
3.1. Stage 1: Flood Extent Mapping
3.2. Stage 2: Creating 3D Water Surface
3.2.1. Method 1: 3D Water Surface Reconstruction using SfM and CNN
3.2.2. Method 2: 3D Water Reconstruction using DEM and CNN
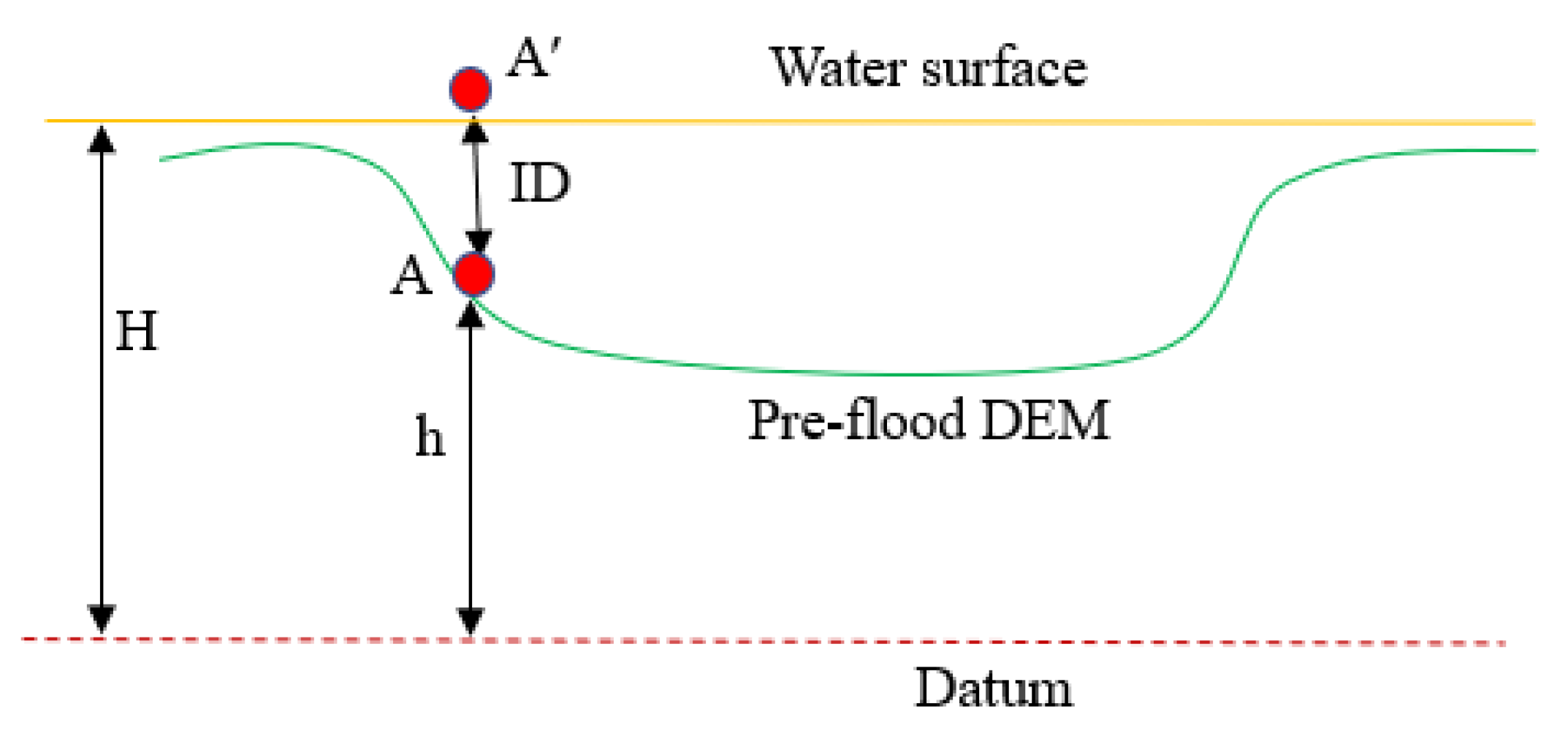
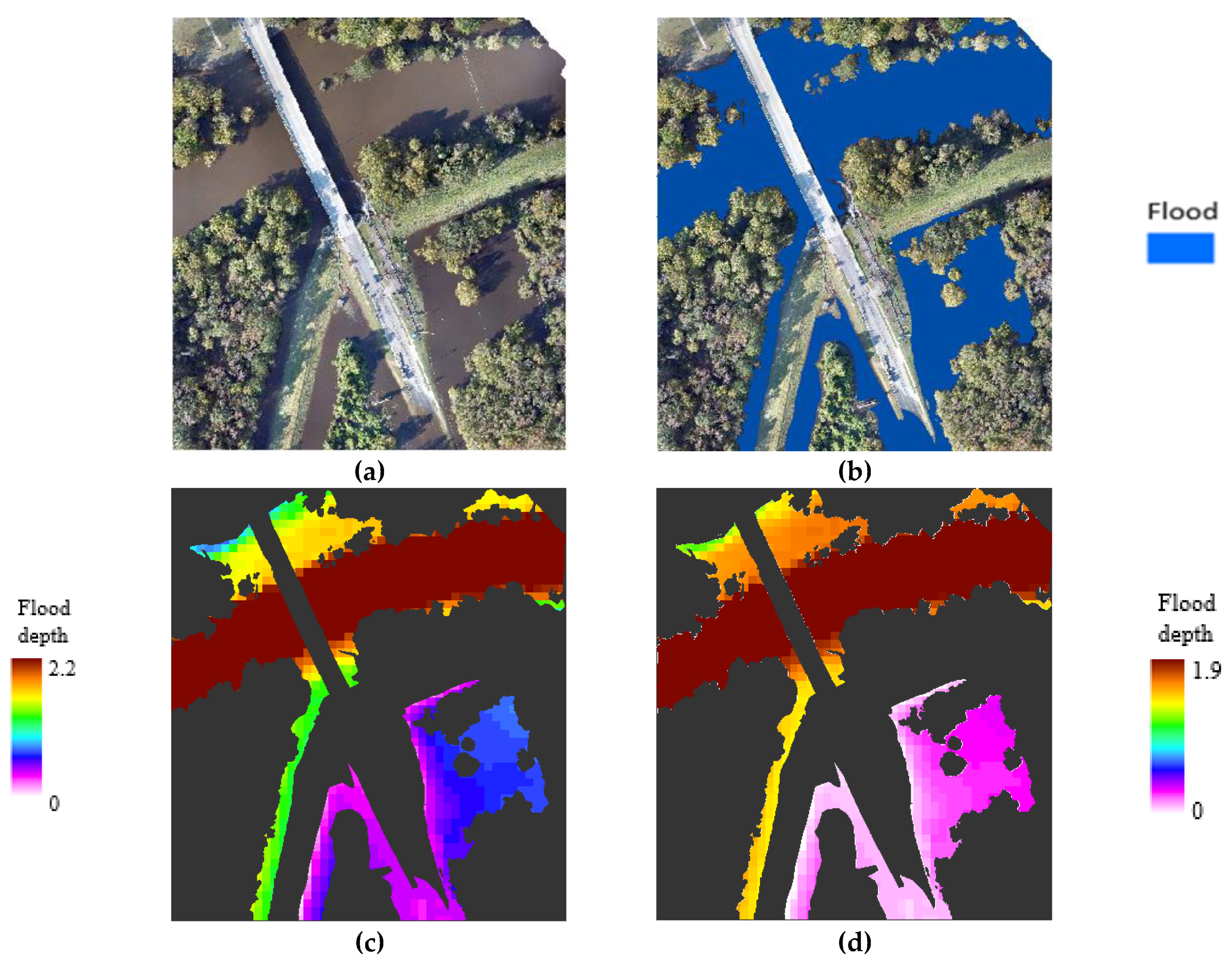
3.3. Stage 3: Floodwater Depth Estimation
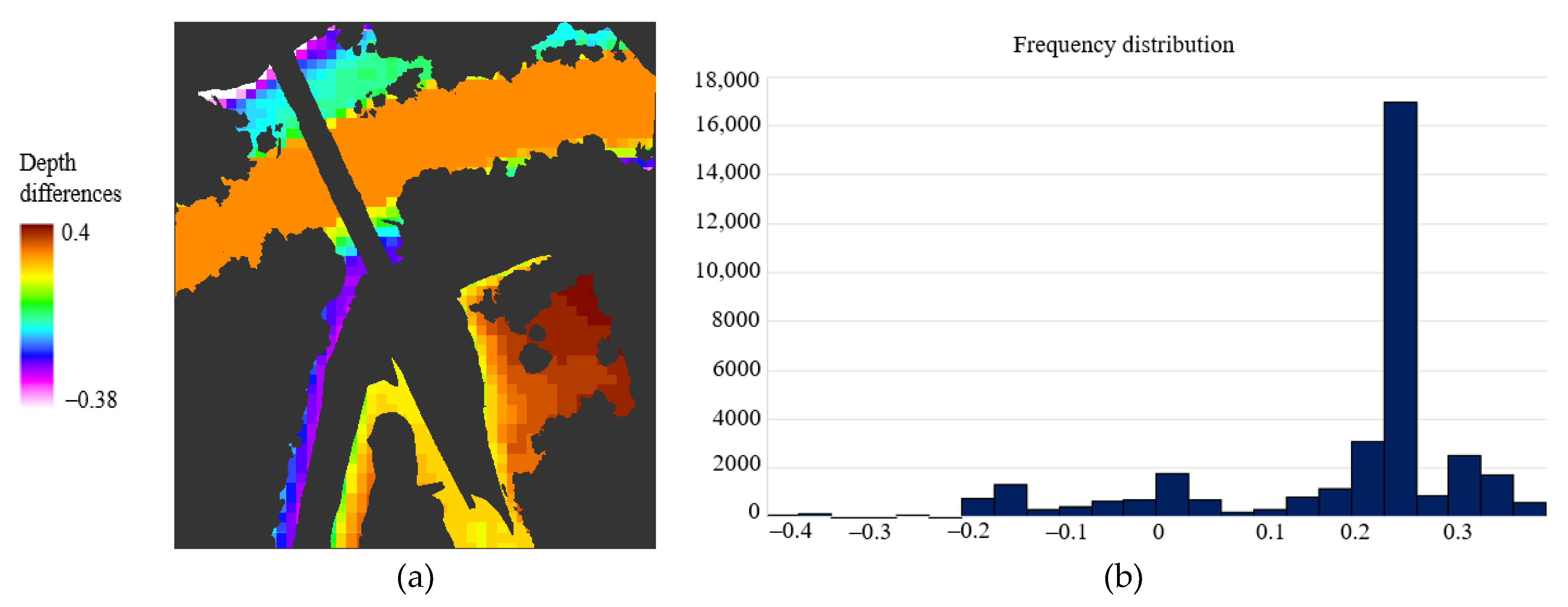
3.4. Evaluation and Comparison
4. Implementation
4.1. Flood Extent Mapping Results
4.2. 3D Water Surface Reconstruction
4.2.1. Method 1: 3D Water Surface using SfM and CNN
4.2.2. Method 2: 3D Water Surface using DEM and CNN
4.3. Floodwater Depth Estimation Results
- DEM quality. Accurate topography data or DEM is indispensable for various remote sensing applications, including flood mapping. The DEM generation methods, such as LiDAR or photogrammetry, yield different levels of accuracy. LiDAR is generally the preferred source for generating elevation data due to its high data quality and ability to map beneath the canopy. For this research, we used two types of DEM: pre-flood LiDAR, and (photogrammetric) SFM-based DEM. Method 1 used these two DEMs to estimate floodwater depths. Method 2, on the other hand, only used pre-flood LiDAR-based DEM and spatial analysis to calculate floodwater depth.
- Inundation extent map quality. The flood extent map accuracy is also another factor that affects the floodwater depth estimation approach’s performance, because the 3D point cloud classification in method 1 and the water elevation extraction in method 2 highly depend on the flood extent polygon planimetric accuracy. Both methods use the flood extent polygon as input for inundation depth estimations. One of the advantages of the proposed approaches is using deep learning-based flood extent polygons. The data-driven and deep learning methods like FCN8s have been proven to be efficient for classification tasks and achieved promising results (with 98.7% accuracy) in extracting flooded areas, reducing the issue of overestimation or underestimating floodwater depths.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rodriguez, J.; Vos, F.; Below, R.; Guha-Sapir, D. Annual Disaster Statistical Review 2008. In The Numbers and Trends; Centre for Research on the Epidemiology of Disasters (CRED): Brussels, Belgium, 2009. [Google Scholar]
- Best Practices in Disaster Recovery—Before the Storm. Available online: https://www.texastribune.org/2018/01/08/hurricane-harvey-was-years-costliest-us-disaster-125-billion-damages/ (accessed on 7 August 2018).
- Hurricane Harvey: Facts, FAQs, and how to help, World Vision. 2017. Available online: https://www.worldvision.org/disaster-relief-news-stories/2017-hurricane-harvey-facts (accessed on 7 September 2018).
- 2017′s three monster hurricanes—Harvey, Irma, and Maria—Among five costliest ever, US Today. Available online: https://www.usatoday.com/story/weather/2018/01/30/2017-s-three-monster-hurricanes-harvey-irma-and-maria-among-five-costliest-ever/1078930001/ (accessed on 1 February 2018).
- Borowska-Stefańska, M.; Kowalski, M.; Wiśniewski, S. The Measurement of Mobility-Based Accessibility—The Impact of Floods on Trips of Various Length and Motivation. ISPRS Int. J. Geo-Inf. 2019, 8, 534. [Google Scholar] [CrossRef]
- Beni, L.H.; Mostafavi, M.A.; Pouliot, J. 3D dynamic simulation within GIS in support of disaster management. In Geomatics Solutions for Disaster Management; Springer: Berlin/Heidelberg, Germany, 2007; pp. 165–184. [Google Scholar]
- Sheffield, J.; Wood, E.F.; Pan, M.; Beck, H.; Coccia, G.; Serrat-Capdevila, A.; Verbist, K. Satellite remote sensing for water resources management: Potential for supporting sustainable development in data-poor regions. Water Resour. Res. 2018, 54, 9724–9758. [Google Scholar] [CrossRef]
- Hashemi-Beni, L.; Gebrehiwot, A. Deep Learning for Remote Sensing Image Classification for Agriculture Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 44, 51–54. [Google Scholar] [CrossRef]
- Revilla-Romero, B.; Hirpa, F.A.; Pozo, J.T.D.; Salamon, P.; Brakenridge, R.; Pappenberger, F.; De Groeve, T. On the use of global flood forecasts and satellite-derived inundation maps for flood monitoring in data-sparse regions. Remote Sens. 2015, 7, 15702–15728. [Google Scholar] [CrossRef]
- Pradhan, B.; Tehrany, M.S.; Jebur, M.N. A new semiautomated detection mapping of flood extent from TerraSAR-X satellite image using rule-based classification and taguchi optimization techniques. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4331–4342. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Qiu, P.; Su, Y.; Guo, Q.; Wang, R.; Wu, X. Evaluating the performance of sentinel-2, landsat 8 and pléiades-1 in mapping mangrove extent and species. Remote Sens. 2018, 10, 1468. [Google Scholar] [CrossRef]
- Boccardo, P.; Chiabrando, F.; Dutto, F.; Tonolo, F.; Lingua, A. UAV deployment exercise for mapping purposes: Evaluation of emergency response applications. Sensors 2015, 15, 15717–15737. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for Namibia using change detection and thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier—A case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Nandi, I.; Srivastava, P.; Shah, K. Floodplain mapping through support vector machine and optical/infrared images from Landsat 8 OLI/TIRS sensors: Case study from Varanasi. Water Resour. Manag. 2017, 31, 1157–1171. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L. A Method to Generate Flood Maps in 3d Using dem and Deep Learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 44, 25–28. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L.; Thompson, G.; Kordjamshidi, P.; Langan, T.E. Deep convolutional neural network for flood extent mapping using unmanned aerial vehicle data. Sensors 2019, 19, 1486. [Google Scholar] [CrossRef]
- Peng, B.; Liu, X.; Meng, Z.; Huang, Q. Urban flood mapping with residual patch similarity learning. In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery, Seattle, WA, USA, 5 November 2019; pp. 40–47. [Google Scholar]
- Sarker, C.; Mejias, L.; Maire, F.; Woodley, A. Flood mapping with convolutional neural networks using spatio-contextual pixel information. Remote Sens. 2019, 11, 2331. [Google Scholar] [CrossRef]
- Wu, C.; Yang, X.; Wang, J. Flood Detection in Sar Images Based on Multi-Depth Flood Detection Convolutional Neural Network. In Proceedings of the 2019 IEEE 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR 2019), Xiamen, China, 26–29 November 2019; pp. 1–6. [Google Scholar]
- Kang, W.; Xiang, Y.; Wang, F.; Wan, L.; You, H. Flood detection in gaofen-3 SAR images via fully convolutional networks. Sensors 2018, 18, 2915. [Google Scholar] [CrossRef] [PubMed]
- Jarihani, A.A.; Callow, J.N.; Johansen, K.; Gouweleeuw, B. Evaluation of multiple satellite altimetry data for studying inland water bodies and river floods. J. Hydrol. 2013, 505, 78–90. [Google Scholar] [CrossRef]
- Baup, F.; Frappart, F.; Maubant, J. Combining high-resolution satellite images and altimetry to estimate the volume of small lakes. Hydrol. Earth Syst. Sci. 2014, 18, 2007–2020. [Google Scholar] [CrossRef]
- Ovando, A.; Martinez, J.M.; Tomasella, J.; Rodriguez, D.A.; von Randow, C. Multi-temporal flood mapping and satellite altimetry used to evaluate the flood dynamics of the Bolivian Amazon wetlands. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 27–40. [Google Scholar] [CrossRef]
- Meesuk, V.; Vojinovic, Z.; Mynett, A.E. Using multidimensional views of photographs for flood modeling. In Proceedings of the 2012 IEEE 6th International Conference on Information and Automation for Sustainability, Beijing, China, 27–29 September 2012; pp. 19–24. [Google Scholar]
- Meesuk, V.; Vojinovic, Z.; Mynett, A.E.; Abdullah, A.F. Urban flood modeling combining top-view LiDAR data with ground-view SfM observations. Adv. Water Resour. 2015, 75, 105–117. [Google Scholar] [CrossRef]
- Hashemi-Beni, L.; Jones, J.; Thompson, G.; Johnson, C.; Gebrehiwot, A. Challenges and opportunities for UAV-based digital elevation model generation for flood-risk management: A case of Princeville, North Carolina. Sensors 2018, 18, 3843. [Google Scholar] [CrossRef] [PubMed]
- Schumann, G.; Hostache, R.; Puech, C.; Hoffmann, L.; Matgen, P.; Pappenberger, F.; Pfister, L. High-resolution 3-D flood information from radar imagery for flood hazard management. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1715–1725. [Google Scholar] [CrossRef]
- Matgen, P.; Schumann, G.; Henry, J.B.; Hoffmann, L.; Pfister, L. Integration of SAR-derived river inundation areas, high-precision topographic data and a river flow model toward near real-time flood management. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 247–263. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Wu, J.; Chen, Z.; Li, L.; Liu, R.; Yu, J. Integration of remotely sensed inundation extent and high-precision topographic data for mapping inundation depth. In Proceedings of the 2014 IEEE 3rd International Conference on Agro-Geoinformatics, Beijing, China, 11–14 August 2014; pp. 1–4. [Google Scholar]
- Cian, F.; Marconcini, M.; Ceccato, P.; Giupponi, C. Flood depth estimation by means of high-resolution SAR images and lidar data. Nat. Hazards Earth Syst. Sci. 2018, 18, 3063–3084. [Google Scholar] [CrossRef]
- Manfreda, S.; Samela, C. A digital elevation model-based method for a rapid estimation of flood inundation depth. J. Flood Risk Manag. 2019, 12, e12541. [Google Scholar] [CrossRef]
- Lou, H.; Wang, P.; Yang, S.; Hao, F.; Ren, X.; Wang, Y.; Shi, L.; Wang, J.; Gong, T. Combining and comparing an unmanned aerial vehicle and multiple remote sensing satellites to calculate long-term river discharge in an ungauged water source region on the Tibetan Plateau. Remote Sens. 2020, 12, 2155. [Google Scholar] [CrossRef]
- Yang, S.; Wang, P.; Lou, H.; Wang, J.; Zhao, C.; Gong, T. Estimating river discharges in ungauged catchments using the slope–area method and unmanned aerial vehicle. Water 2019, 11, 2361. [Google Scholar] [CrossRef]
- Zazo, S.; Molina, J.L.; Rodríguez-Gonzálvez, P. Analysis of flood modeling through innovative geomatic methods. J. Hydrol. 2015, 524, 522–537. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L. Automated Indunation Mapping: Comparison of Methods. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Virtual, 26 September–2 October 2020; pp. 3265–3268. [Google Scholar]
- Hashemi-Beni, L.; Gebrehiwot, A. Flood Extent Mapping: An Integrated Method using Deep Learning and Region Growing Using UAV Optical Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2127–2135. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water | Others | Vegetation | |
|---|---|---|---|
| water | 98.71 | 0.85 | 0.44 |
| others | 1.51 | 95.52 | 2.97 |
| vegetation | data | 1.31 | 98.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gebrehiwot, A.A.; Hashemi-Beni, L. Three-Dimensional Inundation Mapping Using UAV Image Segmentation and Digital Surface Model. ISPRS Int. J. Geo-Inf. 2021, 10, 144. https://doi.org/10.3390/ijgi10030144
Gebrehiwot AA, Hashemi-Beni L. Three-Dimensional Inundation Mapping Using UAV Image Segmentation and Digital Surface Model. ISPRS International Journal of Geo-Information. 2021; 10(3):144. https://doi.org/10.3390/ijgi10030144
Chicago/Turabian StyleGebrehiwot, Asmamaw A, and Leila Hashemi-Beni. 2021. "Three-Dimensional Inundation Mapping Using UAV Image Segmentation and Digital Surface Model" ISPRS International Journal of Geo-Information 10, no. 3: 144. https://doi.org/10.3390/ijgi10030144
APA StyleGebrehiwot, A. A., & Hashemi-Beni, L. (2021). Three-Dimensional Inundation Mapping Using UAV Image Segmentation and Digital Surface Model. ISPRS International Journal of Geo-Information, 10(3), 144. https://doi.org/10.3390/ijgi10030144