
Visualizing Large-Scale Building Information Modeling Models within Indoor and Outdoor Environments Using a Semantics-Based Method


Abstract
:1. Introduction
2. Related Work
2.1. Data Organization for Visualizing Building Information Modeling (BIM) Models in Three-Dimensional Geographic Information Systems (3D GIS)
2.1.1. Level of Detail (LOD)-Based Data Organization
2.1.2. Index-Based Data Organization
2.2. BIM-Based Scheduling Algorithm for Indoor and Outdoor Scenes
2.2.1. LOD-Based Scheduling Algorithms
2.2.2. Index-Based Scheduling Algorithms
3. Materials and Methods
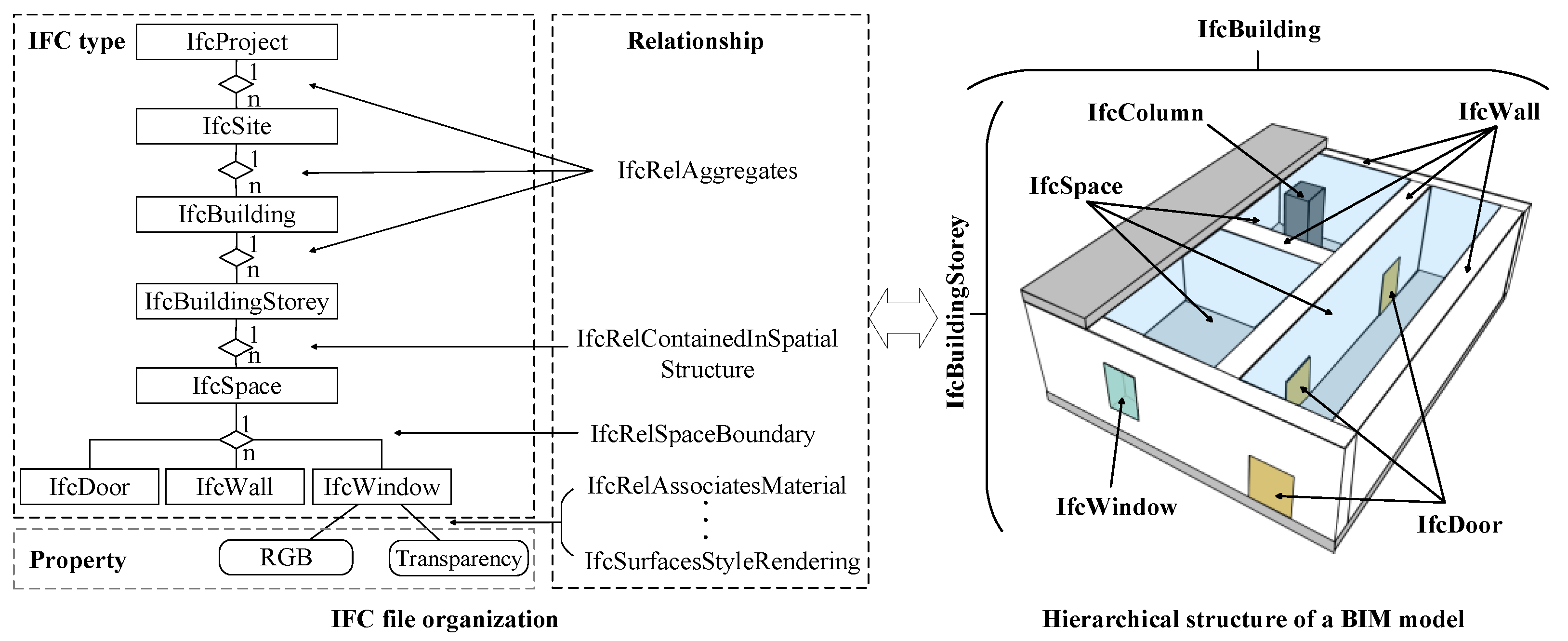
3.1. BIM Semantics
3.2. Semantic-Based Data Organization for Large-Scale BIM Models in 3D GIS
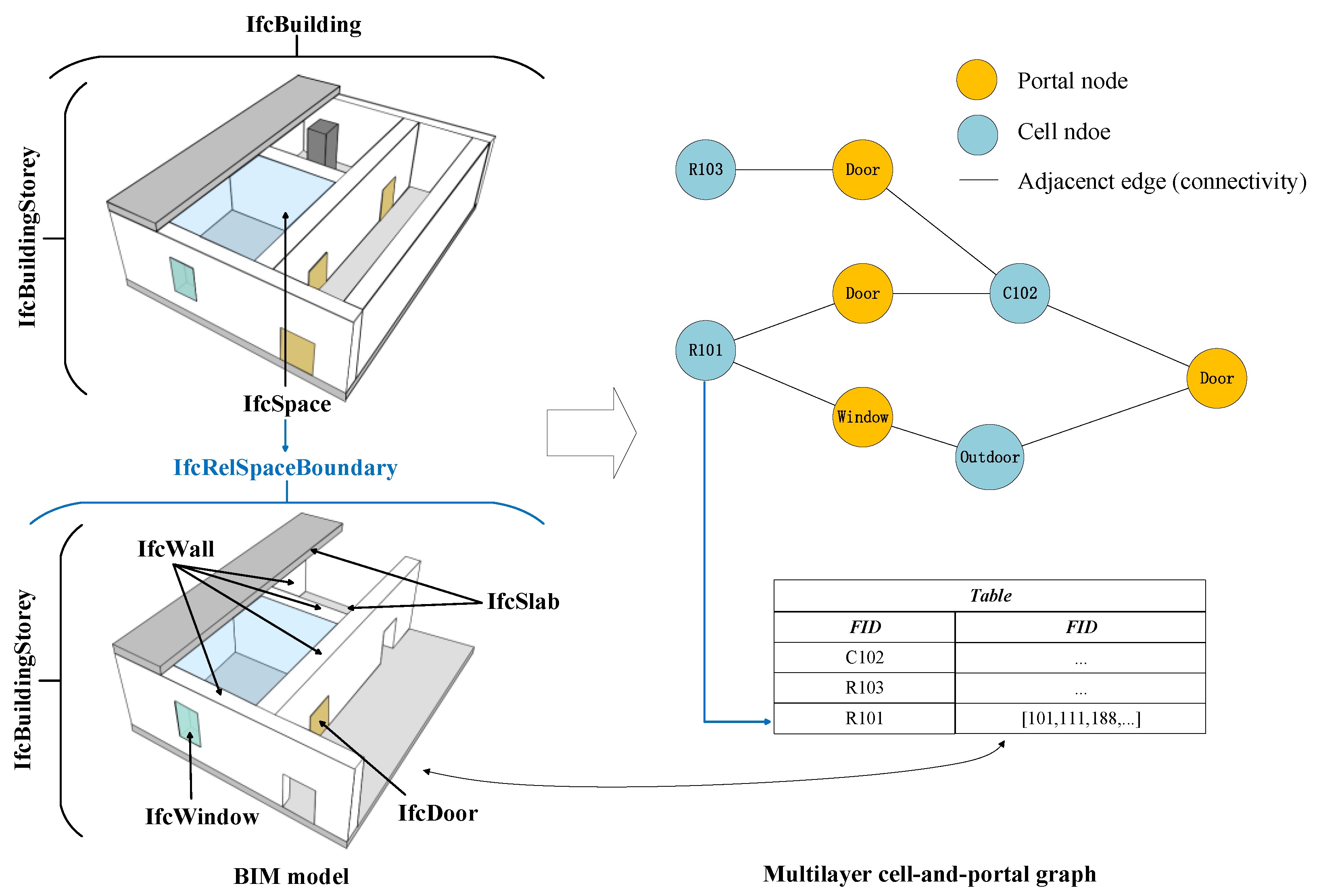
3.2.1. Semantic-Based Data Organization for Indoor Scenes in BIM Models
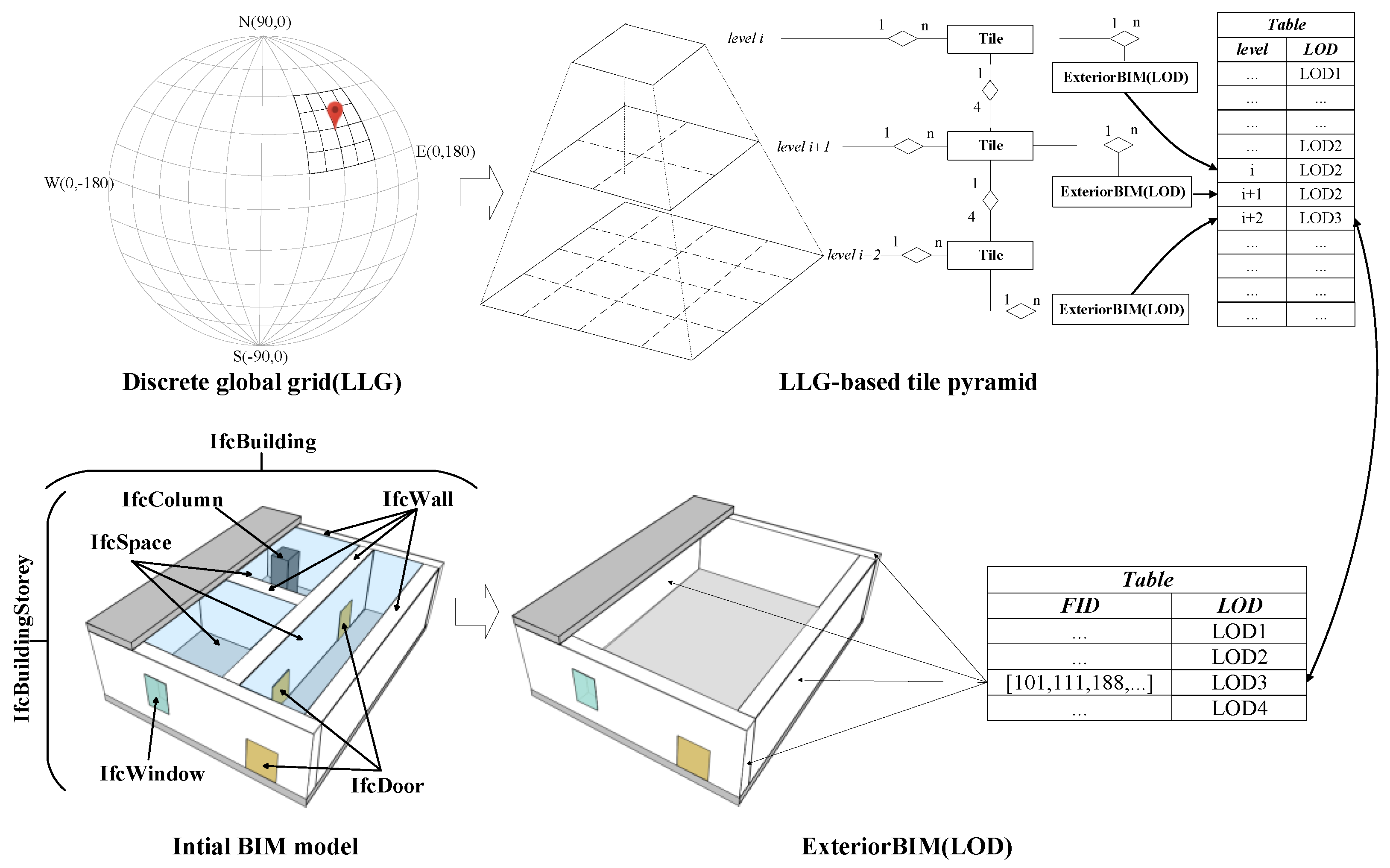
3.2.2. Semantic-Based Data Organization for Outdoor Scenes in BIM Models
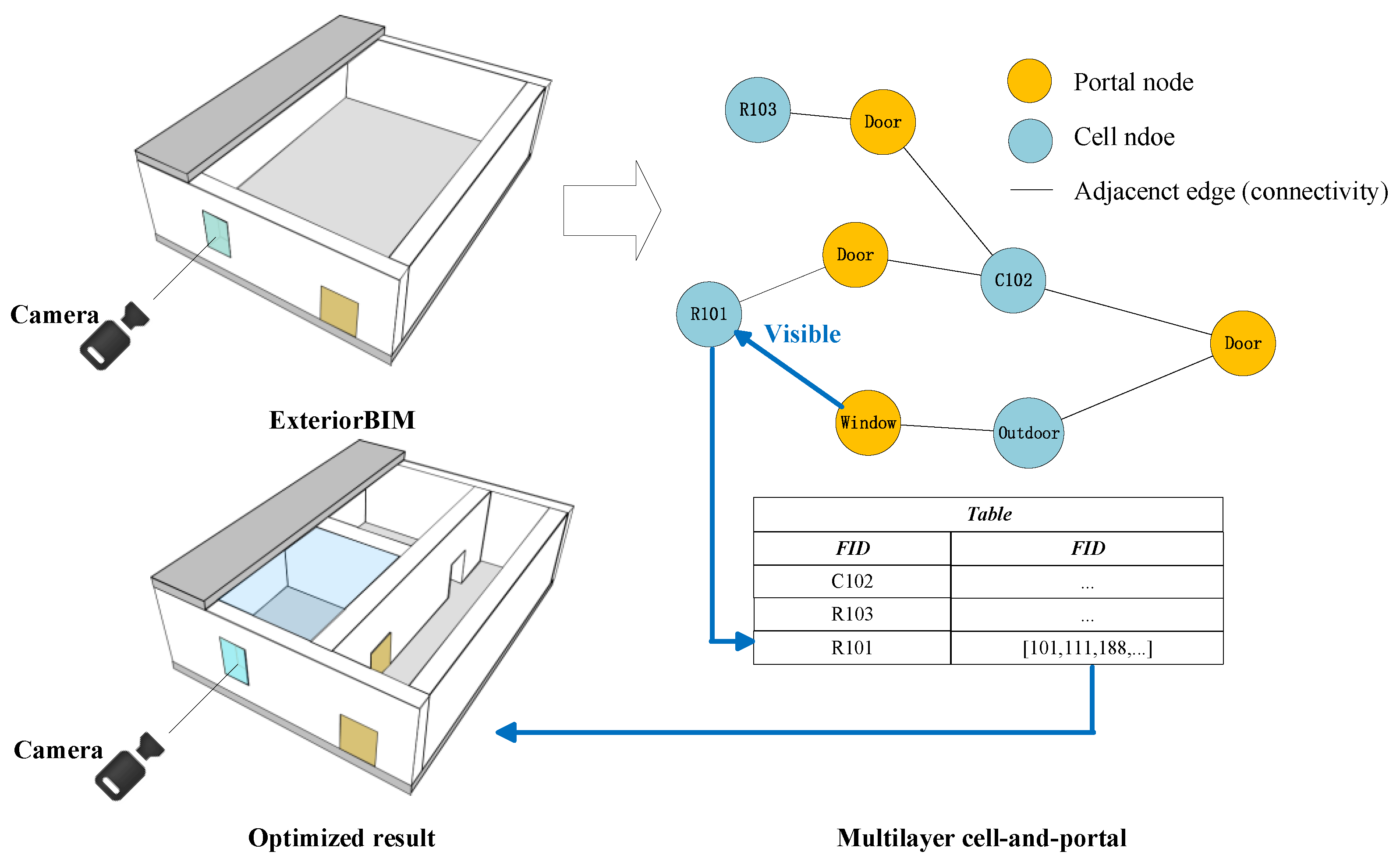
3.3. Semantic-Based Scheduling Algorithm for Indoor/Outdoor Scenes in 3D GIS
| Algorithm 1. Semantic-based scheduling algorithm for indoor scenes in 3D GIS | |
| Input: Camera; Root node of LLG-based tile pyramid. | |
| Output: BIM-GIS visualization. | |
| 1: | . |
| 2: | from the camera. |
| 3: | . |
| 4: | for |
| 5: | . |
| 6: | |
| 7: | and the type of first intersection is IfcSpace |
| 8: | , go to Step2. |
| 9: | end if |
| 10: | end for |
| 11: | end for |
| 12: | if |
| 13: | . |
| 14: | else |
| 15: | . |
| 16: | end if |
| 17: | in the central processing unit (CPU) to the graphic processing unit (GPU) for model rendering. |
3.3.1. Semantic-Based Scheduling Algorithm for Indoor Scenes in 3D GIS
| Algorithm 2. Semantic-based scheduling algorithm for indoor scenes | |
| Input: Camera; IfcSpace; . | |
| Output:. | |
| 1: | Set and . |
| 2: | Obtain building entities associated with IfcSpace and insert into by Section 3.2.2. |
| 3: | Construct multiple rays parallel to the center ray in algorithm 1 around the view and obtain the intersection entity set . |
| 4: | for each building entity in |
| 5: | if “visibility” is true |
| 6: | Obtain other associated with the portal node by . |
| 7: | if |
| 8: | Obtain associated entities inside the BIM model, and add them into by . |
| 9: | . |
| 10: | else |
| 11: | . |
| 12: | end if |
| 13: | end if |
| 14: | end for |
| 15: | Set the distance of the far plane inside the camera is , and add other into by view-frustum culling. |
| 16: | return . |
3.3.2. Semantic-Based Scheduling Algorithm for Outdoor Scenes in 3D GIS
| Algorithm 3. Semantic-based scheduling algorithm for outdoor scenes | |
| Input: Camera; Scene root. | |
| Output: . | |
| 1: | . |
| 2: | and other GIS data sources by view-frustum culling. |
| 3: | forin. |
| 4: | cener. . |
| 5: | end for |
| 6: | . |
| 7: | if |
| 8: | if “visibility” is true |
| 9: | Obtain ID of the IfcSpace associated with the portal node. |
| 10: | . |
| 11: | end if |
| 12: | end if |
| 13: | return. |
4. Results
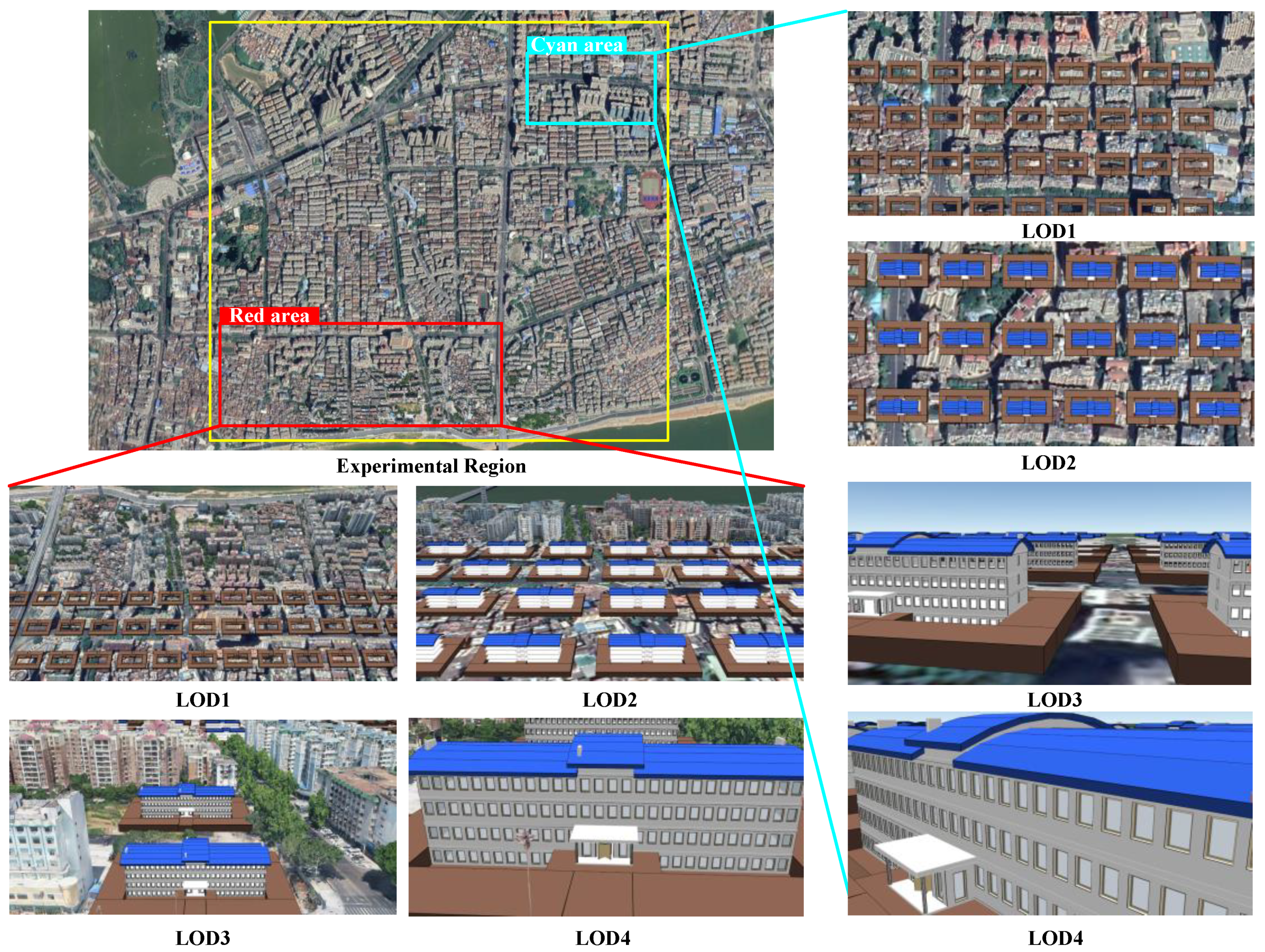
4.1. Experimental Setup
4.2. Validity Analysis of Large-Scale BIM Models in the Virtual Globe
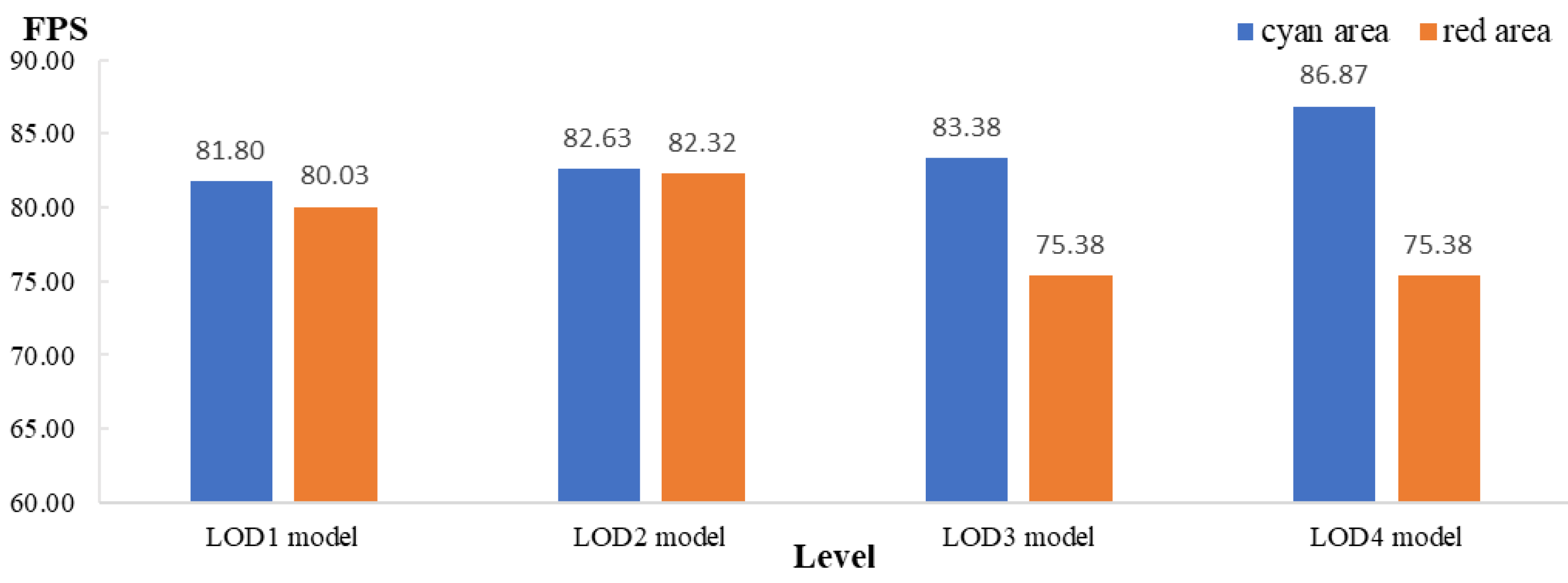
4.3. Comparative Analysis of Experimental Results
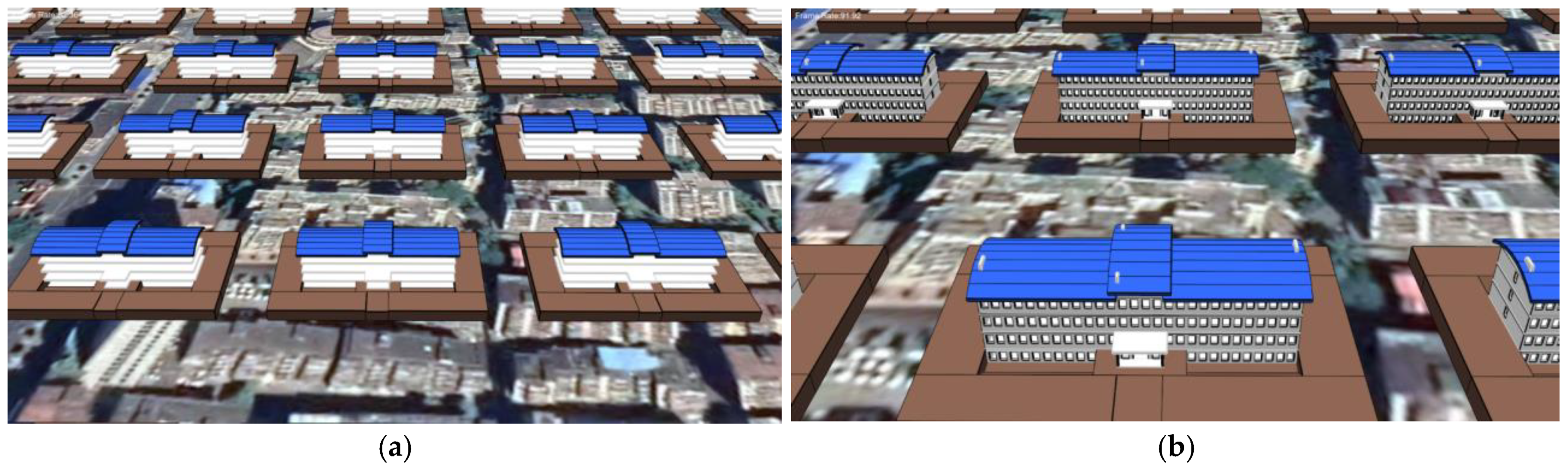
4.3.1. Visualizing Outdoor Scenes
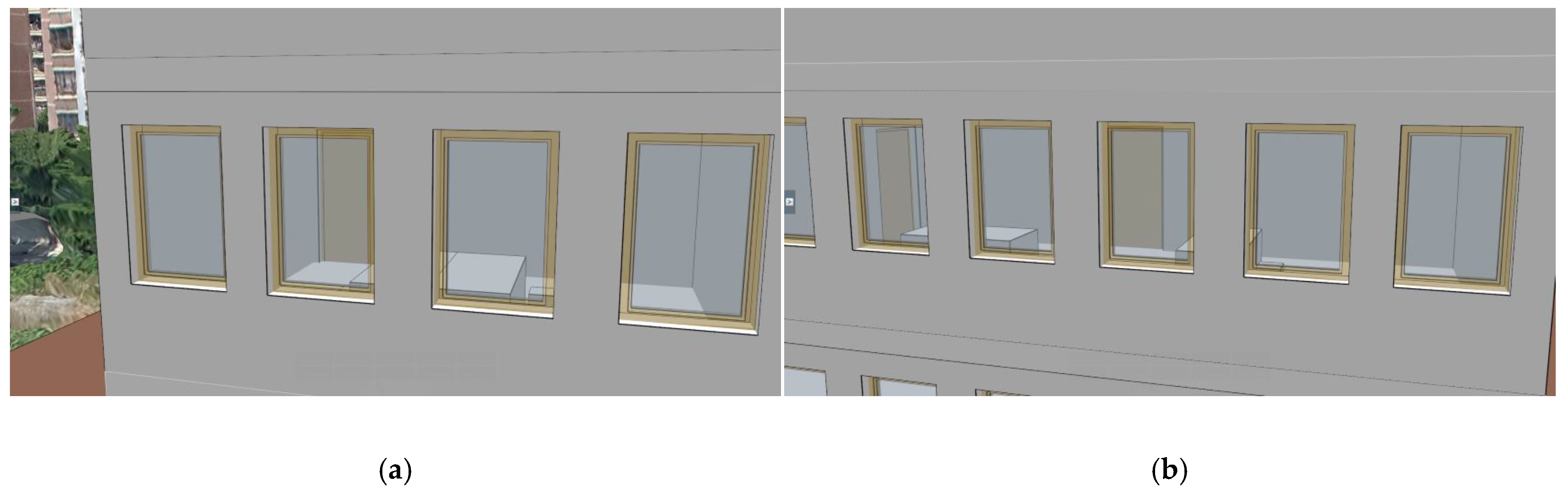
4.3.2. Visualizing Indoor Scenes
5. Conclusions
- (1)
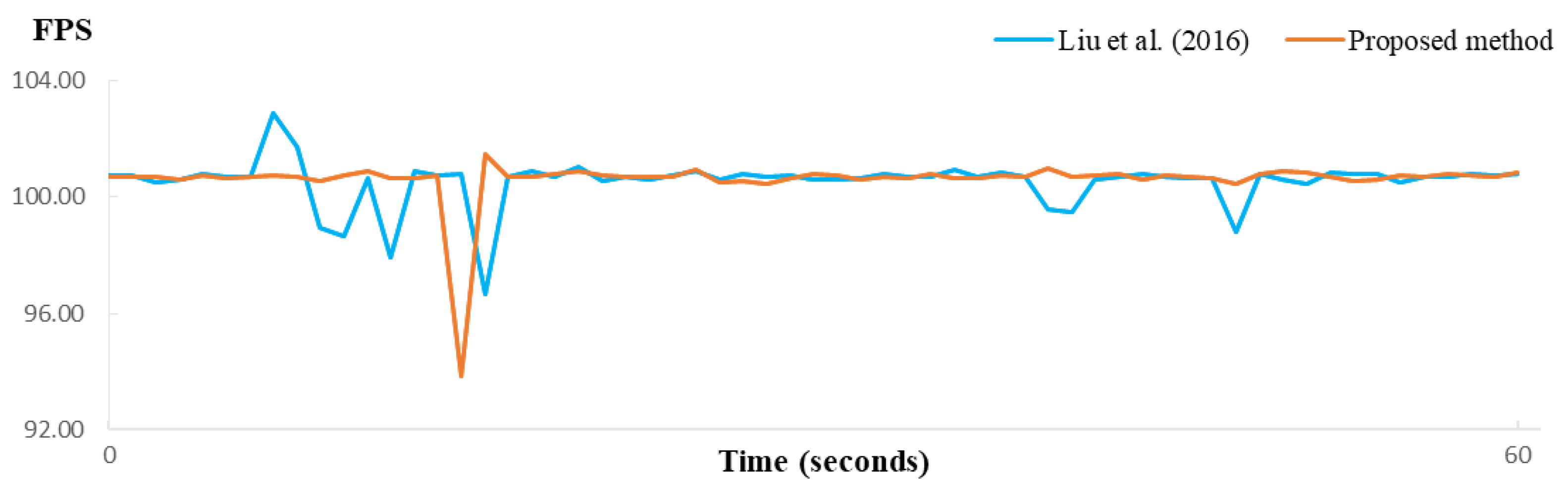
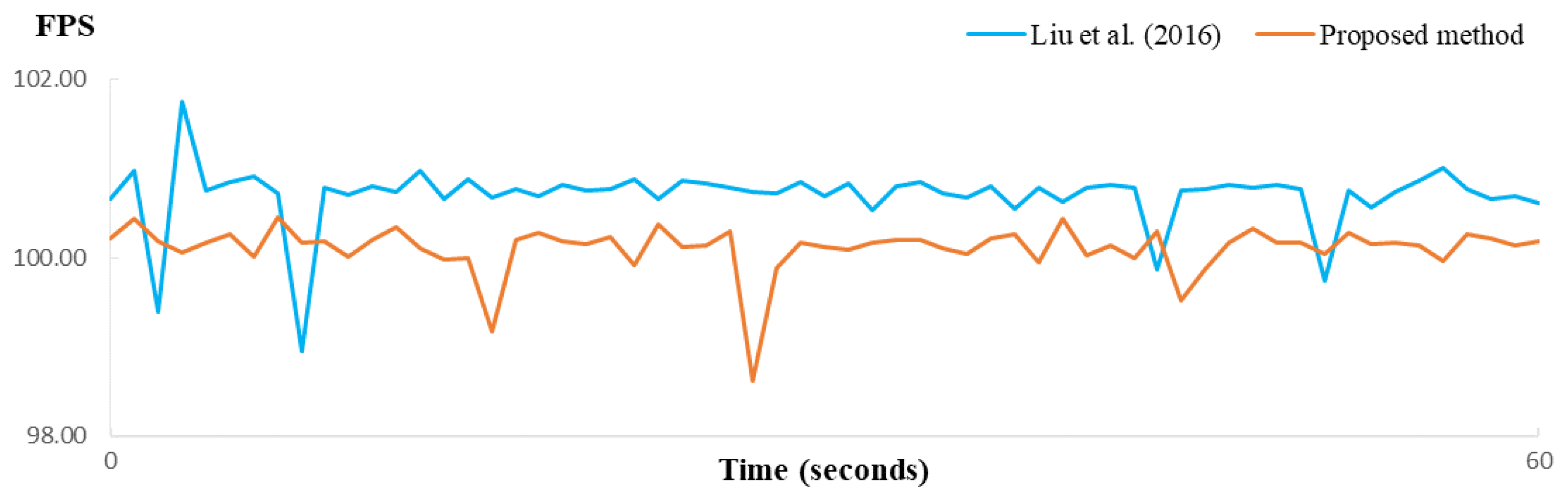
- For outdoor scenes, the proposed LLG-based tile pyramid can effectively meet the visualization of large-scale BIM models on the virtual globe. When browsing windows and exterior entities, visible entities of the interior spaces viewed from outdoors are loaded, ensuring realistic visualization (Figure 12 and Figure 13) while effectively maintaining stable computing resources (Figure 14 and Figure 15).
- (2)
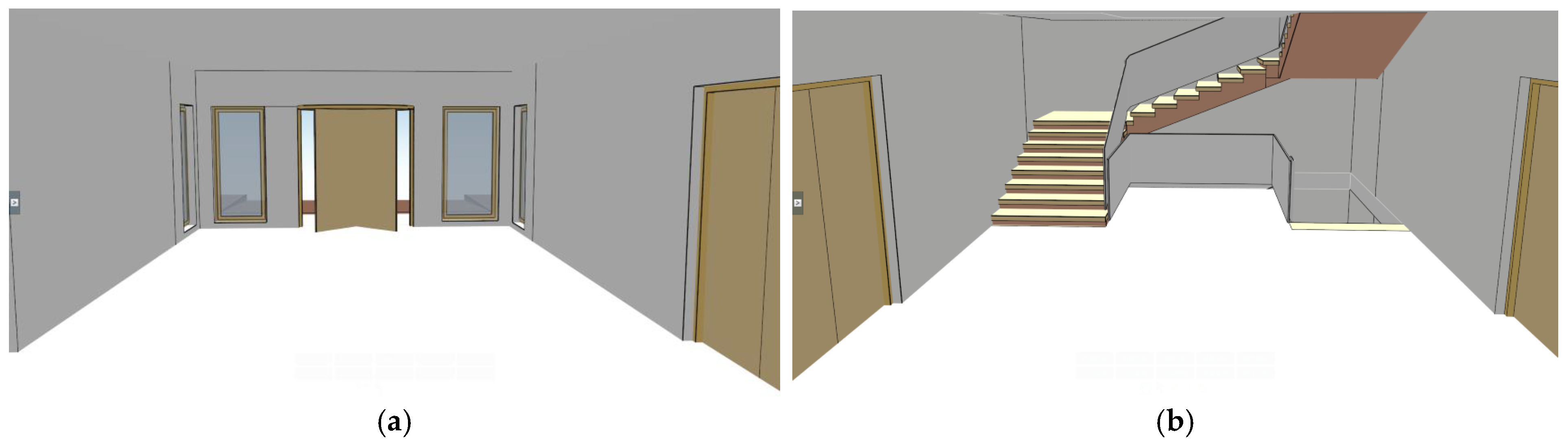
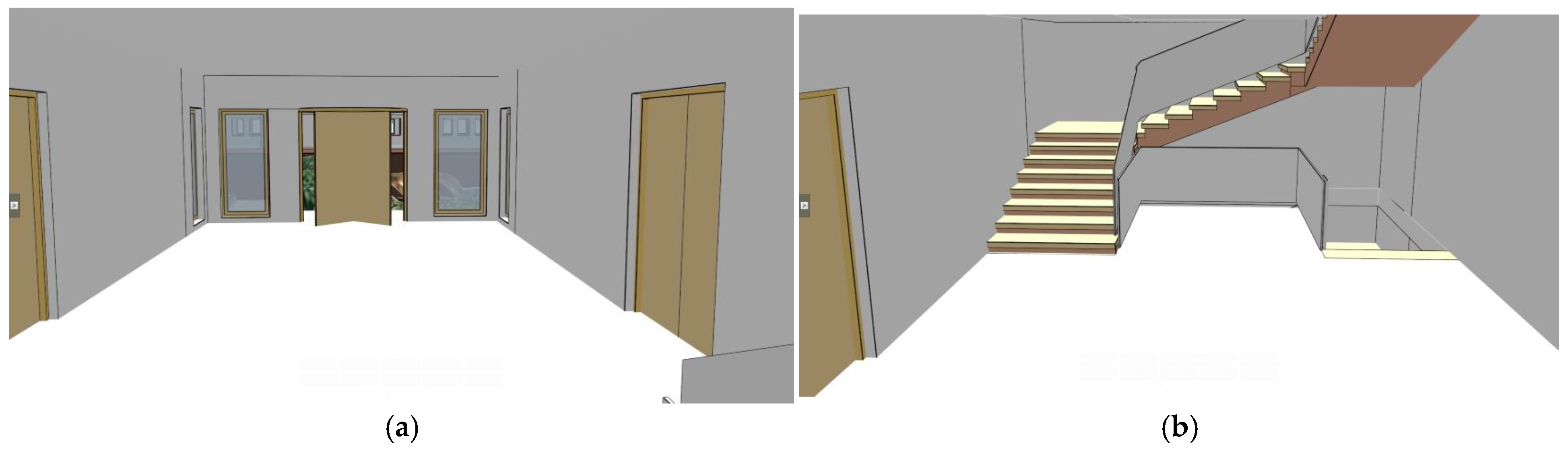
- For indoor scenes, a multilayer cell-and-portal graph can effectively reduce the geometric data volume. For example, when browsing windows and interior entities, our method can unload other spaces (e.g., rooms) and load entities of current space according to the current location of the indoor space. Moreover, invisible BIM data from outdoor scenes is removed, which not only ensures realistic visualization (Figure 16 and Figure 17) but also effectively reduces the volume of geometric data (Figure 18 and Figure 19).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, Y.; Wang, X.; Tan, Y.; Wu, P.; Sutrisna, M.; Cheng, J.; Hampson, K. Trends and Opportunities of BIM-GIS Integration in the Architecture, Engineering and Construction Industry: A Review from a Spatio-Temporal Statistical Perspective. ISPRS Int. J. Geo-Inf. 2017, 6, 397. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wang, X.; Wright, G.; Cheng, J.; Li, X.; Liu, R. A State-of-the-Art Review on the Integration of Building Information Modeling (BIM) and Geographic Information System (GIS). ISPRS Int. J. Geo-Inf. 2017, 6, 53. [Google Scholar] [CrossRef] [Green Version]
- IFC in ArcGIS—Bringing Open Standard BIM Data into GIS Workflows. Available online: https://technical.buildingsmart.org/idea/ifc-in-arcgis-bringing-open-standard-bim-data-into-gis-workflows/ (accessed on 3 November 2021).
- Ivanov, R. An Approach for Developing Indoor Navigation Systems for Visually Impaired People Using Building Information Modeling. J. Ambient Intell. Smart Environ. 2017, 9, 449–467. [Google Scholar] [CrossRef]
- Mahdaviparsa, A.; McCuen, T. Comparison between Current Methods of Indoor Network Analysis for Emergency Response Through BIM/CAD-GIS Integration. In Advances in Informatics and Computing in Civil and Construction Engineering; Mutis, I., Hartmann, T., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 627–635. ISBN 978-3-030-00219-0. [Google Scholar]
- Teo, T.-A.; Cho, K.-H. BIM-Oriented Indoor Network Model for Indoor and Outdoor Combined Route Planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Atazadeh, B.; Kalantari, M.; Rajabifard, A.; Ho, S.; Ngo, T. Building Information Modelling for High-Rise Land Administration. Trans. GIS 2017, 21, 91–113. [Google Scholar] [CrossRef]
- Barzegar, M.; Rajabifard, A.; Kalantari, M.; Atazadeh, B. 3D BIM-Enabled Spatial Query for Retrieving Property Boundaries: A Case Study in Victoria, Australia. Int. J. Geogr. Inf. Sci. 2020, 34, 251–271. [Google Scholar] [CrossRef]
- Shojaei, D.; Rajabifard, A.; Kalantari, M.; Bishop, I.D.; Aien, A. Design and Development of a Web-Based 3D Cadastral Visualisation Prototype. Int. J. Digit. Earth 2015, 8, 538–557. [Google Scholar] [CrossRef]
- Amirebrahimi, S.; Rajabifard, A.; Mendis, P.; Ngo, T. A Framework for a Microscale Flood Damage Assessment and Visualization for a Building Using BIM–GIS Integration. Int. J. Digit. Earth 2016, 9, 363–386. [Google Scholar] [CrossRef]
- Yamamura, S.; Fan, L.; Suzuki, Y. Assessment of Urban Energy Performance through Integration of BIM and GIS for Smart City Planning. Proc. Eng. 2017, 180, 1462–1472. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Guo, H.; Annoni, A.; Bian, L.; de Bie, K.; Campbell, F.; Craglia, M.; Ehlers, M.; van Genderen, J.; Jackson, D.; et al. Next-Generation Digital Earth. Proc. Natl. Acad. Sci. USA 2012, 109, 11088–11094. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Gong, P. Google Earth as a Virtual Globe Tool for Earth Science Applications at the Global Scale: Progress and Perspectives. Int. J. Remote Sens. 2012, 33, 3966–3986. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, L.; Li, H.; Lin, Y.-H.; Yin, S. Combining IFC and 3D Tiles to Create 3D Visualization for Building Information Modeling. Autom. Constr. 2020, 109, 102995. [Google Scholar] [CrossRef]
- Zhan, W.; Chen, Y.; Chen, J. 3D Tiles-Based High-Efficiency Visualization Method for Complex BIM Models on the Web. ISPRS Int. J. Geo-Inf. 2021, 10, 476. [Google Scholar] [CrossRef]
- Tolmer, C.-E.; Castaing, C.; Diab, Y.; Morand, D. CityGML and IFC: Going Further than LOD. In Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), Marseille, France, 28 October–1 November 2013; pp. 645–648. [Google Scholar]
- Kim, J.-S.; Li, K.-J. Simplification of Geometric Objects in an Indoor Space. ISPRS J. Photogramm. Remote Sens. 2019, 147, 146–162. [Google Scholar] [CrossRef]
- Zhou, X.; Zhao, J.; Wang, J.; Su, D.; Zhang, H.; Guo, M.; Guo, M.; Li, Z. OutDet: An Algorithm for Extracting the Outer Surfaces of Building Information Models for Integration with Geographic Information Systems. Int. J. Geogr. Inf. Sci. 2019, 33, 1444–1470. [Google Scholar] [CrossRef]
- Liu, X.; Xie, N.; Tang, K.; Jia, J. Lightweighting for Web3D Visualization of Large-Scale BIM Scenes in Real-Time. Graph. Models 2016, 88, 40–56. [Google Scholar] [CrossRef]
- Lu, Y.; Wu, Z.; Chang, R.; Li, Y. Building Information Modeling (BIM) for Green Buildings: A Critical Review and Future Directions. Autom. Constr. 2017, 83, 134–148. [Google Scholar] [CrossRef]
- Peterson, P.R. Discrete Global Grid Systems. In International Encyclopedia of Geography: People, the Earth, Environment and Technology; Richardson, D., Castree, N., Goodchild, M.F., Kobayashi, A., Liu, W., Marston, R.A., Eds.; John Wiley & Sons, Ltd.: Oxford, UK, 2017; pp. 1–10. ISBN 978-0-470-65963-2. [Google Scholar]
- de Laat, R.; van Berlo, L. Integration of BIM and GIS: The Development of the CityGML GeoBIM Extension. In Advances in 3D Geo-Information Sciences; Kolbe, T.H., König, G., Nagel, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 211–225. ISBN 978-3-642-12669-7. [Google Scholar]
- Donkers, S.; Ledoux, H.; Zhao, J.; Stoter, J. Automatic Conversion of IFC Datasets to Geometrically and Semantically Correct CityGML LOD3 Buildings: Automatic Conversion of IFC Datasets to CityGML LOD3 Buildings. Trans. GIS 2016, 20, 547–569. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.; Cheng, J.C.P.; Anumba, C. Mapping between BIM and 3D GIS in Different Levels of Detail Using Schema Mediation and Instance Comparison. Autom. Constr. 2016, 67, 1–21. [Google Scholar] [CrossRef]
- Chen, Y.; Shooraj, E.; Rajabifard, A.; Sabri, S. From IFC to 3D Tiles: An Integrated Open-Source Solution for Visualising BIMs on Cesium. ISPRS Int. J. Geo-Inf. 2018, 7, 393. [Google Scholar] [CrossRef] [Green Version]
- Varduhn, V.; Mundani, R.P.; Rank, E. Real Time Processing of Large Data Sets from Built Infrastructure. J. Syst. Cybern. Inform. 2011, 9, 63–67. [Google Scholar]
- Borrmann, A.; König, M.; Koch, C.; Beetz, J. (Eds.) Building Information Modeling: Technology Foundations and Industry Practice; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-92861-6. [Google Scholar]
- Liebich, T. IFC4—The New BuildingSMART Standard; AEC3 Ltd.: High Wycombe, UK, 2013. [Google Scholar]
- Uggla, G.; Horemuz, M. Geographic Capabilities and Limitations of Industry Foundation Classes. Autom. Constr. 2018, 96, 554–566. [Google Scholar] [CrossRef]
- Arroyo Ohori, K.; Diakité, A.; Krijnen, T.; Ledoux, H.; Stoter, J. Processing BIM and GIS Models in Practice: Experiences and Recommendations from a GeoBIM Project in The Netherlands. ISPRS Int. J. Geo-Inf. 2018, 7, 311. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Chen, J.; Huang, W. Method for Generation of Indoor GIS Models Based on BIM Models to Support Adjacent Analysis of Indoor Spaces. ISPRS Int. J. Geo-Inf. 2020, 9, 508. [Google Scholar] [CrossRef]
- Diakite, A.A.; Zlatanova, S. Automatic Geo-Referencing of BIM in GIS Environments Using Building Footprints. Comput. Environ. Urban Syst. 2020, 80, 101453. [Google Scholar] [CrossRef]
- Cohen-Or, D.; Chrysanthou, Y.L.; Silva, C.T.; Durand, F. A Survey of Visibility for Walkthrough Applications. IEEE Trans. Vis. Comput. Graph. 2003, 9, 412–431. [Google Scholar] [CrossRef] [Green Version]
- Dong, Q.; Chen, J. A Tile-Based Method for Geodesic Buffer Generation in a Virtual Globe. Int. J. Geogr. Inf. Sci. 2018, 32, 302–323. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | IFC Type | Description |
|---|---|---|
| Portal entity | IfcDoor | Door |
| IfcWindow | Window | |
| IfcStair | Stair | |
| Property | IfcSurfaceStyleShading | Transparency (value between 0 and 1) |
| IfcSurfaceStyleRendering | Transparency (value between 0 and 1) | |
| IfcProperty | Custom property (e.g., opening-closing state of door) |
| Level | IFC Type | Geometric Type |
|---|---|---|
| LOD1 | IfcSite | Body |
| LOD2 | IfcSlab, IfcRoof | Body |
| LOD3 | IfcWall, IfcColumn | Body |
| LOD4 | Other entities | Body |
| Type | No. of IfcProduct | No. of Vertices | No. of Triangles | Visible Distance (m) |
|---|---|---|---|---|
| Original BIM model | 785 | 451,536 | 175,540 | - |
| LOD1 model | 1 | 1092 | 436 | 500~1000 |
| LOD2 model | 27 | 4356 | 1712 | 200~500 |
| LOD3 model | 75 | 107,456 | 40,567 | 50~200 |
(LOD4 model) | 282 | 209,800 | 80,508 | <50 |
| Experimental Area | IfcProduct Number | No. of Vertices | No. of Triangles |
|---|---|---|---|
| Area 1 | 8 | 3418 | 1304 |
| Area 2 | 11 | 3938 | 1507 |
| Experimental Area | IfcProduct Number | No. of Vertices | No. of Triangles |
|---|---|---|---|
| Proposed method | 50 | 30,360 | 11,577 |
| Liu et al. (2016) | 785 | 451,536 | 175,540 |
| Experimental Area | IfcProduct Number | No. of Vertices | No. of Triangles |
|---|---|---|---|
| Proposed method | 332 | 240,160 | 92,085 |
| Liu et al. (2016) | 785 | 451,536 | 175,540 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Chen, J.; Huang, W. Visualizing Large-Scale Building Information Modeling Models within Indoor and Outdoor Environments Using a Semantics-Based Method. ISPRS Int. J. Geo-Inf. 2021, 10, 756. https://doi.org/10.3390/ijgi10110756
Chen Q, Chen J, Huang W. Visualizing Large-Scale Building Information Modeling Models within Indoor and Outdoor Environments Using a Semantics-Based Method. ISPRS International Journal of Geo-Information. 2021; 10(11):756. https://doi.org/10.3390/ijgi10110756
Chicago/Turabian StyleChen, Qingxiang, Jing Chen, and Wumeng Huang. 2021. "Visualizing Large-Scale Building Information Modeling Models within Indoor and Outdoor Environments Using a Semantics-Based Method" ISPRS International Journal of Geo-Information 10, no. 11: 756. https://doi.org/10.3390/ijgi10110756
APA StyleChen, Q., Chen, J., & Huang, W. (2021). Visualizing Large-Scale Building Information Modeling Models within Indoor and Outdoor Environments Using a Semantics-Based Method. ISPRS International Journal of Geo-Information, 10(11), 756. https://doi.org/10.3390/ijgi10110756