Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Description of End Effectors
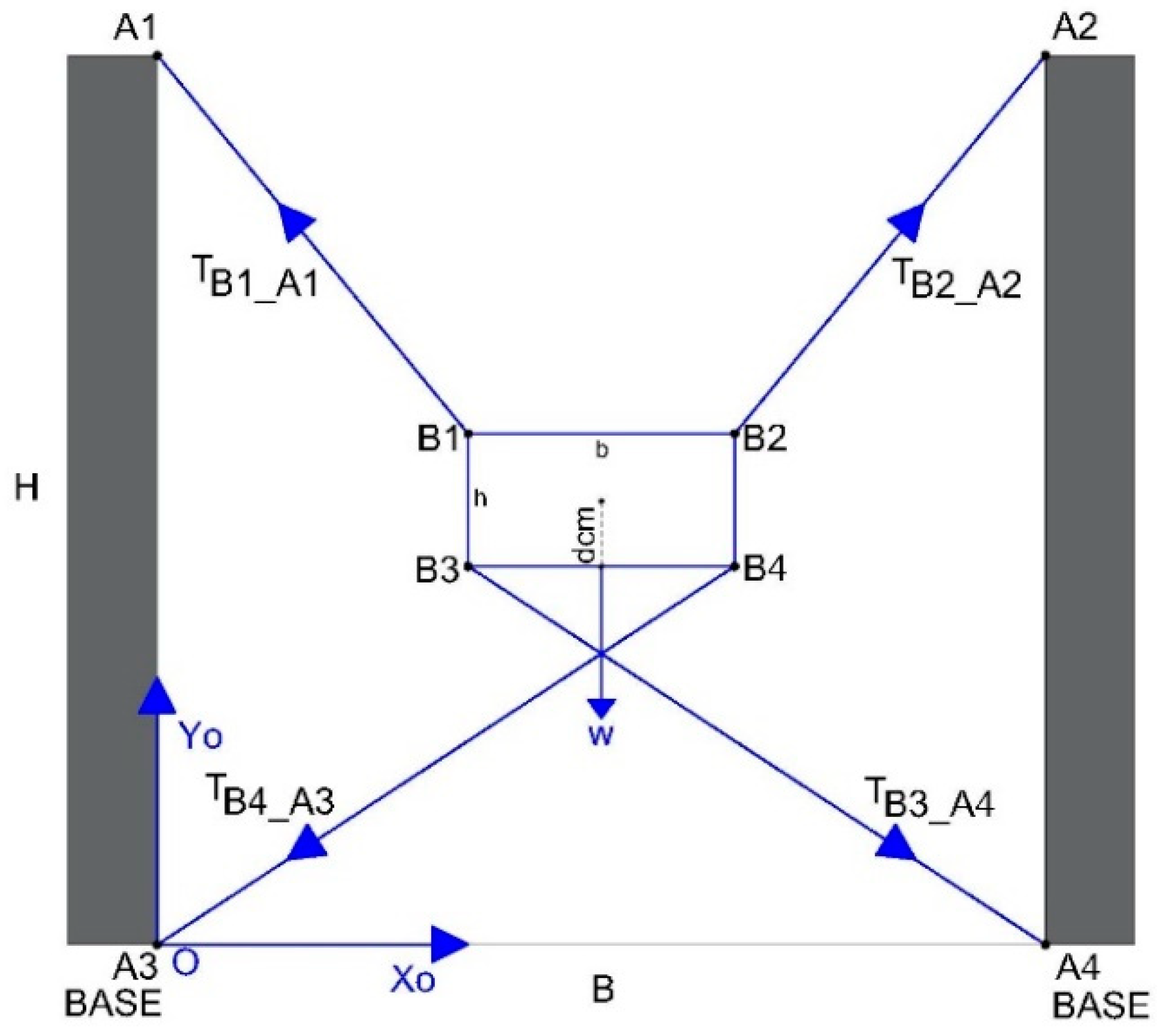
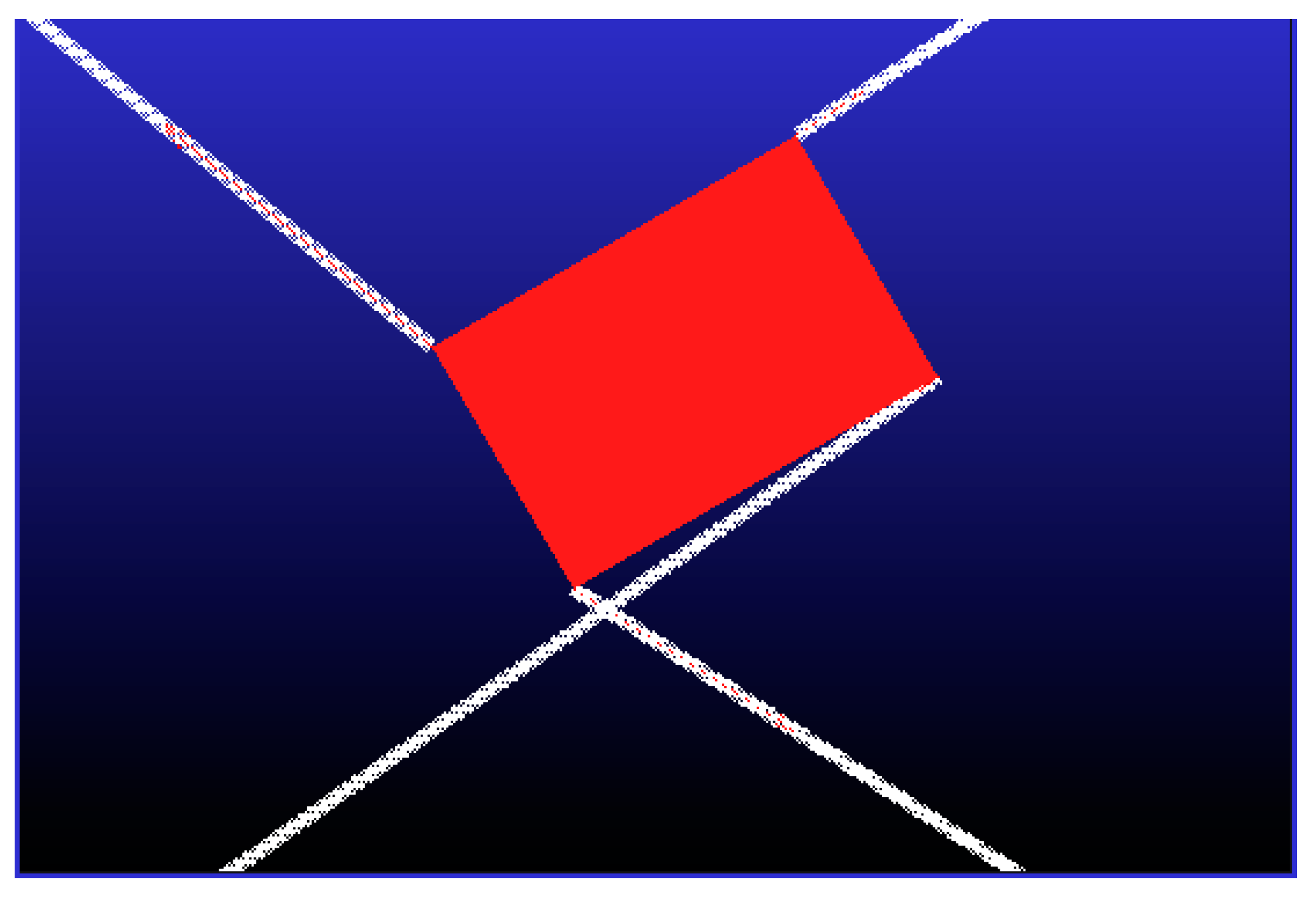
- Case 1: A four-cable planar CDPR with 3-DoF and an EE with rectangular geometry where cables are attached at fixed anchor points on the EE. In this configuration, the cables cannot collide with the EE during a rotation, so the only forces acting on the cables are tension forces. Figure 1 shows the EE with the classical rectangular geometry, where the measurements of the mobile structure are:
- H = 0.2 m and b = 0.3 m, respectively.
- W = 50 N, is the weight of the EE.
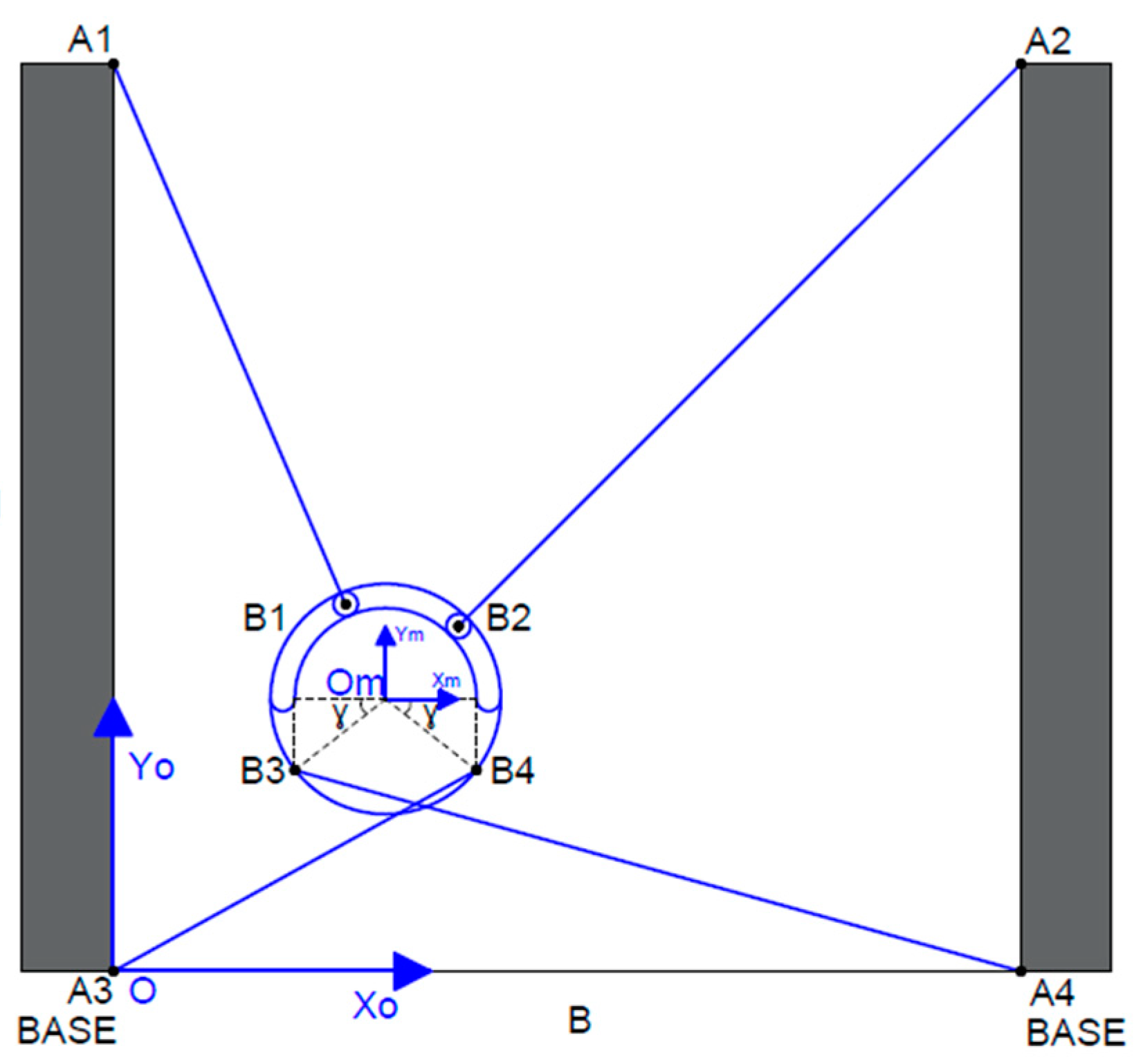
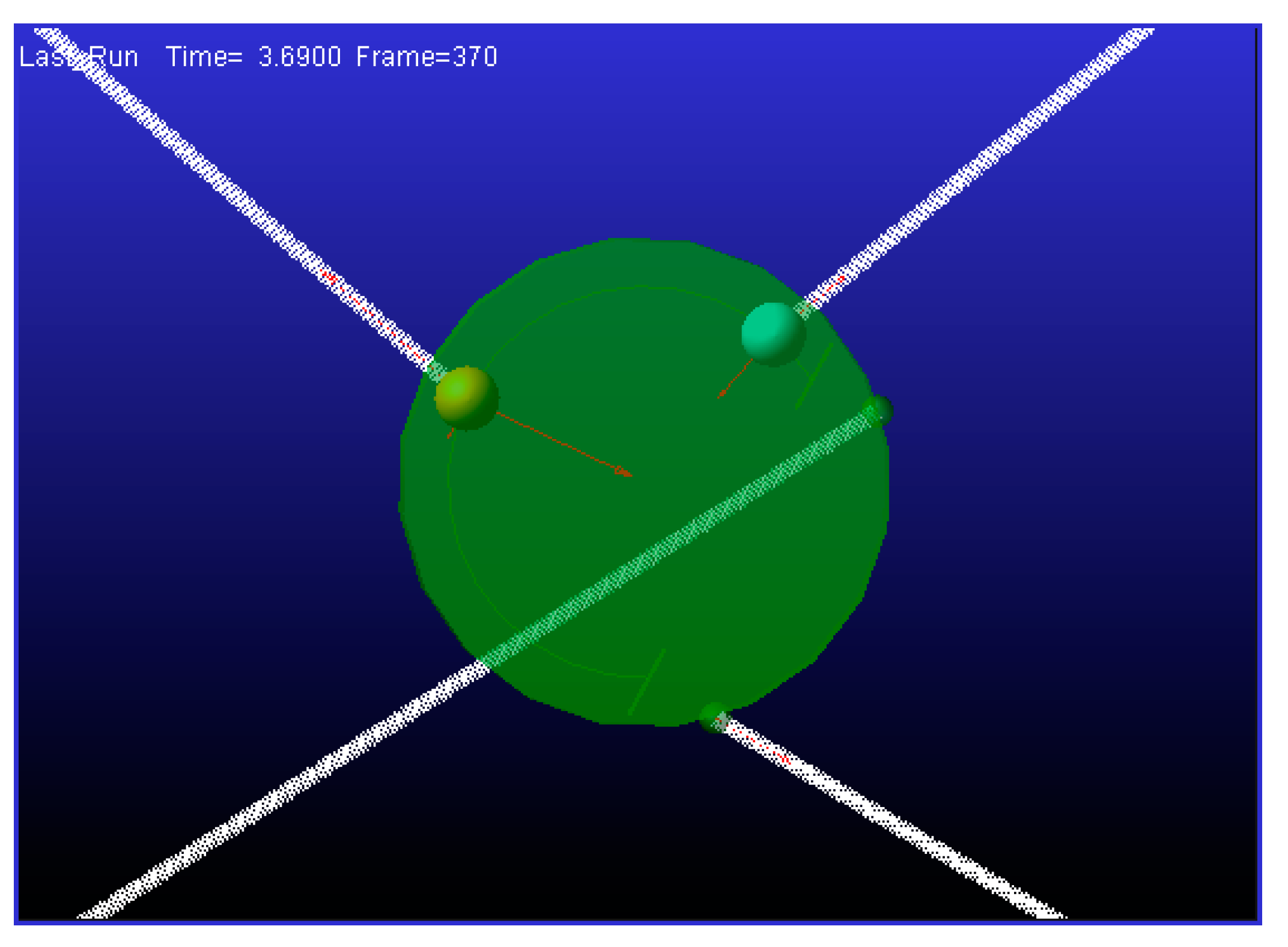
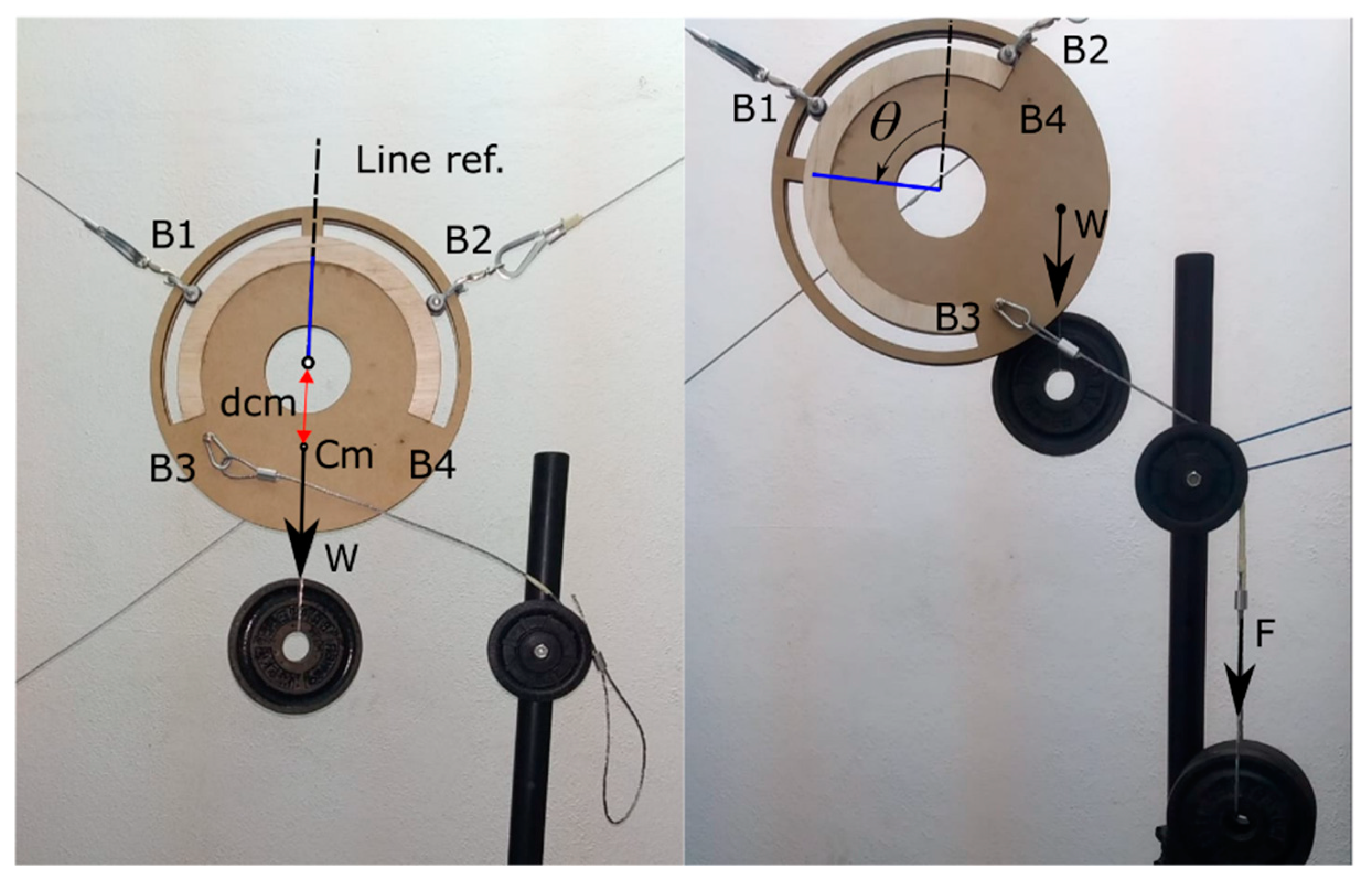
- Case 2: A passive reconfigurable four-cable planar CDPR with 3-DoF and an EE with circular geometry where cable-connection points supporting the robot can move freely around the circular periphery mechanism, so the orienting effect is linked only to the two fixed anchored cables at the lower side. In Figure 2, the geometry of this EE is depicted, where its physical dimensions are:
- The radius of the EE is 0.15 m.
- The segment of the circular periphery of the upper cable support guide S is delimited by the product of 2·β.
- The angle of the bottom anchor points respect to the horizontal axis is denoted as γ.
- The center-of-mass displacement is given by dcm.
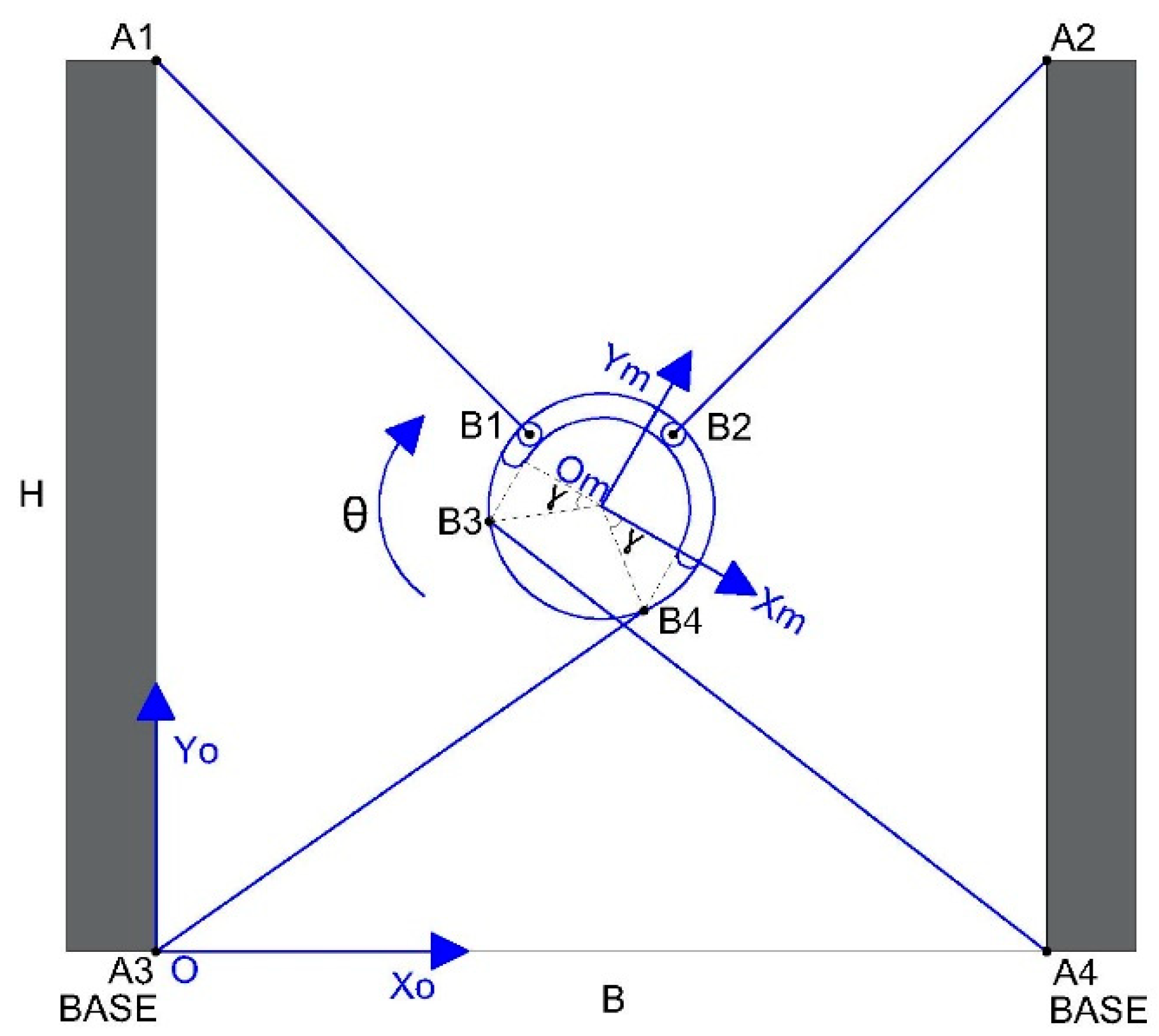
It must be noted that to avoid collisions between lower cables (B3-A4 and B4-A3) the anchor points are placed in opposite faces of the EE. - Case 3: The workspace conditions are those of case 2, but the cable-connection points supporting the robot can move through a restricted segment of the circular periphery mechanism. This segment is delimited by a specified angle.
3. Methodology and Experimentation
3.1. Case 1
- H is the height of the anchor points for the cables 2.2 m, and B defines the distance between the poles 3 m.
- Tmax = 200 N, is the maximum tension on the cables.
3.2. Case 2
3.3. Case 3
4. Analysis of Results
5. Discussion
5.1. Planar CDPR with 3-DoF and a Rectangular EE
5.2. The Planar Reconfigurable Passive CDPR with 3-DoF and an Effector with Circular Geometry
5.3. Real Experimental Test of the Passive Reconfigurable Planar CDPR with 3-DoF and the EE with a Circular Geometry
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Martin, A.; Caro, S.; Cardou, P. Geometric Determination of the Cable-Cylinder Interference Regions in the Workspace of a Cable-Driven Parallel Robot. In Mechanisms and Machine Science, Proceedings of the Third International Conference on Cable-Driven Parallel Robots, Quebec City, QC, Canada, 2–4 August 2017; Springer: Berlin/Heidelberg, Germany, 2016; p. 53. [Google Scholar]
- Merlet, J.P.; Daney, D. A portable modular parallel wire crane for rescue operations. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Alamdari, A.; Krovi, V. Design and Analysis of a Cable-Driven Articulated Rehabilitation System for Gait Training. J. Mech. Robot. 2016, 8, 051018. [Google Scholar] [CrossRef]
- Abbasnejad, G.; Yoon, J.; Lee, H. Optimum kinematic design of a planar cable-driven parallel robot with wrench-closure gait trajectory. Mech. Mach. Theory 2016, 99, 1–18. [Google Scholar] [CrossRef]
- Lamine, H.; Laribi, M.A.; Bennour, S.; Romdhane, L.; Zeghloul, S. Design Study of a Cable-based Gait Training Machine. J. Bionic Eng. 2017, 14, 232–244. [Google Scholar] [CrossRef]
- Gao, B.; Song, H.; Zhao, J.; Guo, S.; Sun, L.; Tang, Y. Inverse kinematics and workspace analysis of a cable-driven parallel robot with a spring spine. Mech. Mach. Theory 2014, 76, 56–69. [Google Scholar] [CrossRef]
- Seriani, S.; Gallina, P.; Wedler, A. A modular cable robot for inspection and light manipulation on celestial bodies. Acta Astronaut. 2016, 123, 145–153. [Google Scholar] [CrossRef]
- Seriani, S.; Gallina, P.; Wedler, A. Dynamics of a tethered rover on rough terrain. In Advances in Italian Mechanism Science; Springer: Berlin/Heidelberg, Germany, 2017; pp. 355–361. [Google Scholar]
- Borgstrom, P.H.; Jordan, B.L.; Sukhatme, G.S.; Batalin, M.A.; Kaiser, W.J. Rapid Computation of Optimally Safe Tension Distributions for Parallel Cable-Driven Robots. IEEE Trans. Robot. 2009, 25, 1271–1281. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Wrench-Feasible Workspace of Parallel Cable-Driven Mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1492–1497. [Google Scholar]
- Bosscher, P.; Riechel, A.T.; Uphoff, I.E. Wrench-feasible workspace generation for cable-driven robots. IEEE Trans. Robot. 2006, 22, 890–902. [Google Scholar] [CrossRef]
- Bayaniy, H.; Masoulehy, M.T.; Karimiy, A.; Cardouz, P.; Ebrahimiy, M. On the determination of the maximal inscribed ellipsoid in the Wrench-Feasible Workspace of the cable-driven parallel robots. In Proceedings of the 2nd RSI/ISM International Conference on Robotics and Mechatronics, Tehran, Iran, 15–17 October 2014; pp. 422–427. [Google Scholar]
- Merlet, J.P. On the workspace of suspended cable-driven parallel robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 841–846. [Google Scholar]
- Piao, J.; Jin, X.; Jung, J.; Choil, E.; Park, J.O.; Kim, C.S. Development of a high payload cable-driven parallel robot. In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 423–425. [Google Scholar]
- Choi, S.H.; Park, K.S. The integrated elasto-plastic cable modeling for cable driven parallel robots (CDPRs). In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 420–422. [Google Scholar]
- Wang, B.; Zi, B.; Qian, S. Collision free force closure workspace determination of reconfigurable planar cable driven parallel robot. In Proceedings of the Asia-Pacific Conference on Intelligent Robot Systems, Tokyo, Japan, 20–22 July 2016; pp. 26–30. [Google Scholar]
- Anson, M.; Alamdari, A.; Krovi, V. Orientation Workspace and Stiffness Optimization of Cable-Driven Parallel Manipulators with Base Mobility. J. Mech. Robot. 2017, 9, 031011. [Google Scholar] [CrossRef]
- Rodriguez-Barroso, A.; Saltaren, R.; Portilla, G.A.; Cely, J.S.; Carpio, M. Cable-Driven Parallel Robot with Reconfigurable EE Controlled with a Compliant Actuator. Sensor 2018, 18, 2765. [Google Scholar] [CrossRef] [PubMed]
- Duan, Q.; Vashista, V.; Agrawal, S.K. Effect on wrench-feasible workspace of cable-driven parallel robots by adding springs. Mech. Mach. Theory 2015, 86, 201–210. [Google Scholar] [CrossRef]
- Gagliardini, L.; Caro, S.; Gouttefarde, M.; Girin, A. Discrete reconfiguration planning for Cable-Driven Parallel Robots. Mech. Mach. Theory 2016, 100, 313–337. [Google Scholar] [CrossRef]
- Barbazza, L.; Oscari, F.; Minto, S.; Rosati, G. Trajectory planning of a suspended cable driven parallel robot with reconfigurable end effector. Robot. Comput. Integr. Manuf. 2017, 48, 1–11. [Google Scholar] [CrossRef]
- Nguyen, D.; Gouttefarde, M. Study of reconfigurable suspended cable driven robots for airplane maintenance. In Proceedings of the IEEE International Conference on Intelligent robots and systems, Chicago, IL, USA, 14–18 September 2014; pp. 1682–1689. [Google Scholar]
- Pott, A. Determination of the Cable Span and Cable Deflextion of Cable-Driven Parallel Robots. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2018; pp. 106–116. [Google Scholar]
- Zhao, T.; Zi, B.; Qian, S.; Yin, Z.; Zhang, D. Typical configuration analysis of a modular reconfigurable cable-driven parallel robot. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Qian, S.; Zi, B.; Wang, D.; Li, Y. Development of Modular Cable-Driven Parallel Robotic Systems. IEEE Access 2019, 7, 5541–5553. [Google Scholar] [CrossRef]
- Kang, X.; Dai, J. Relevance and Transferability for Parallel Mechanisms with Reconfigurable Platforms. J. Mech. Robot. 2019, 11. [Google Scholar] [CrossRef]




























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carpio Alemán, M.A.; Saltaren, R.; Rodriguez, A.; Portilla, G.; Placencia, J.D. Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration. Robotics 2019, 8, 57. https://doi.org/10.3390/robotics8030057
Carpio Alemán MA, Saltaren R, Rodriguez A, Portilla G, Placencia JD. Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration. Robotics. 2019; 8(3):57. https://doi.org/10.3390/robotics8030057
Chicago/Turabian StyleCarpio Alemán, Marco Alexander, Roque Saltaren, Alejandro Rodriguez, Gerardo Portilla, and Juan Diego Placencia. 2019. "Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration" Robotics 8, no. 3: 57. https://doi.org/10.3390/robotics8030057
APA StyleCarpio Alemán, M. A., Saltaren, R., Rodriguez, A., Portilla, G., & Placencia, J. D. (2019). Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration. Robotics, 8(3), 57. https://doi.org/10.3390/robotics8030057