V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
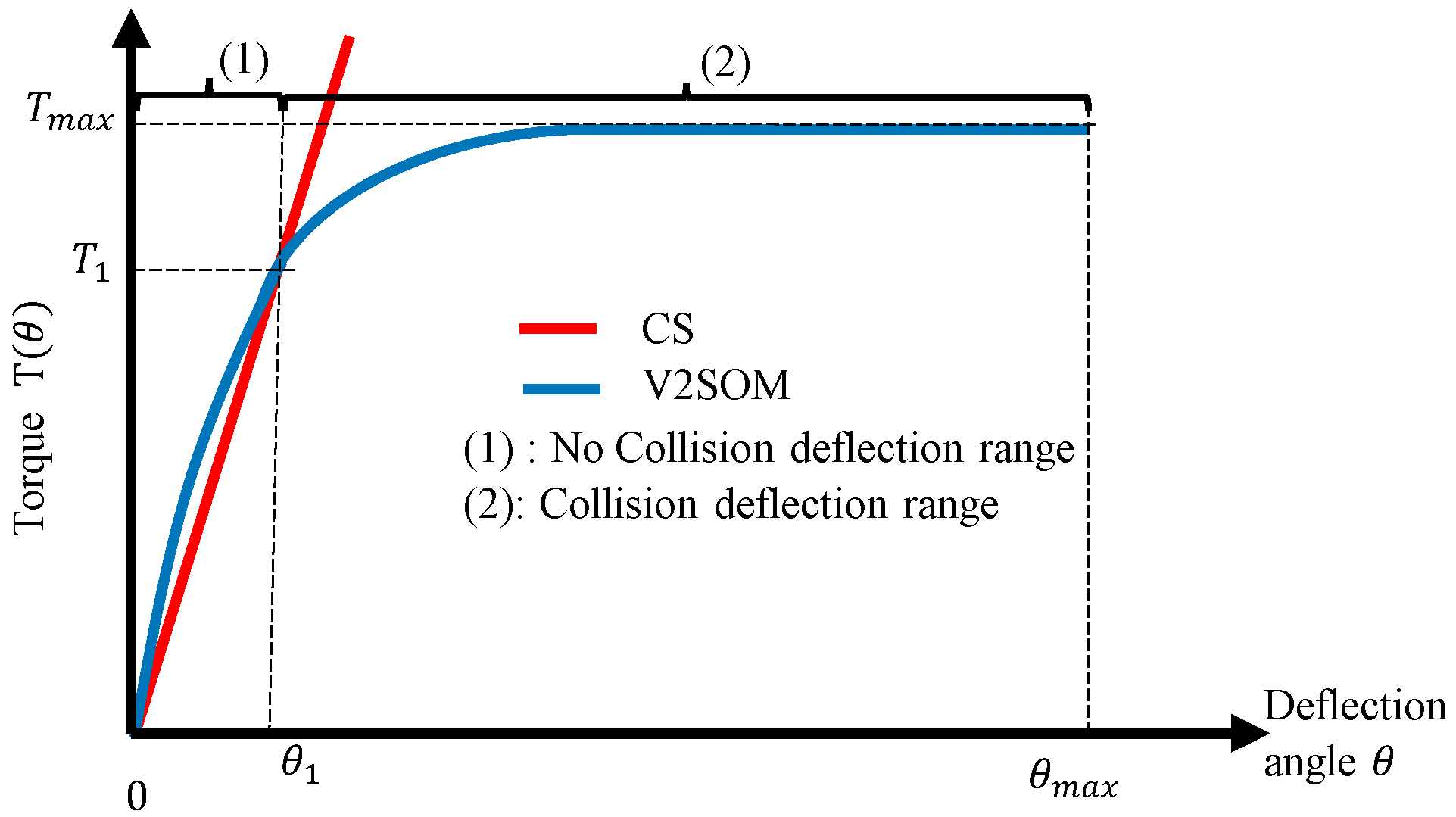
- The stiffness behavior, in the vicinity of zero deflection, is smoothened via a cam-follower mechanism.
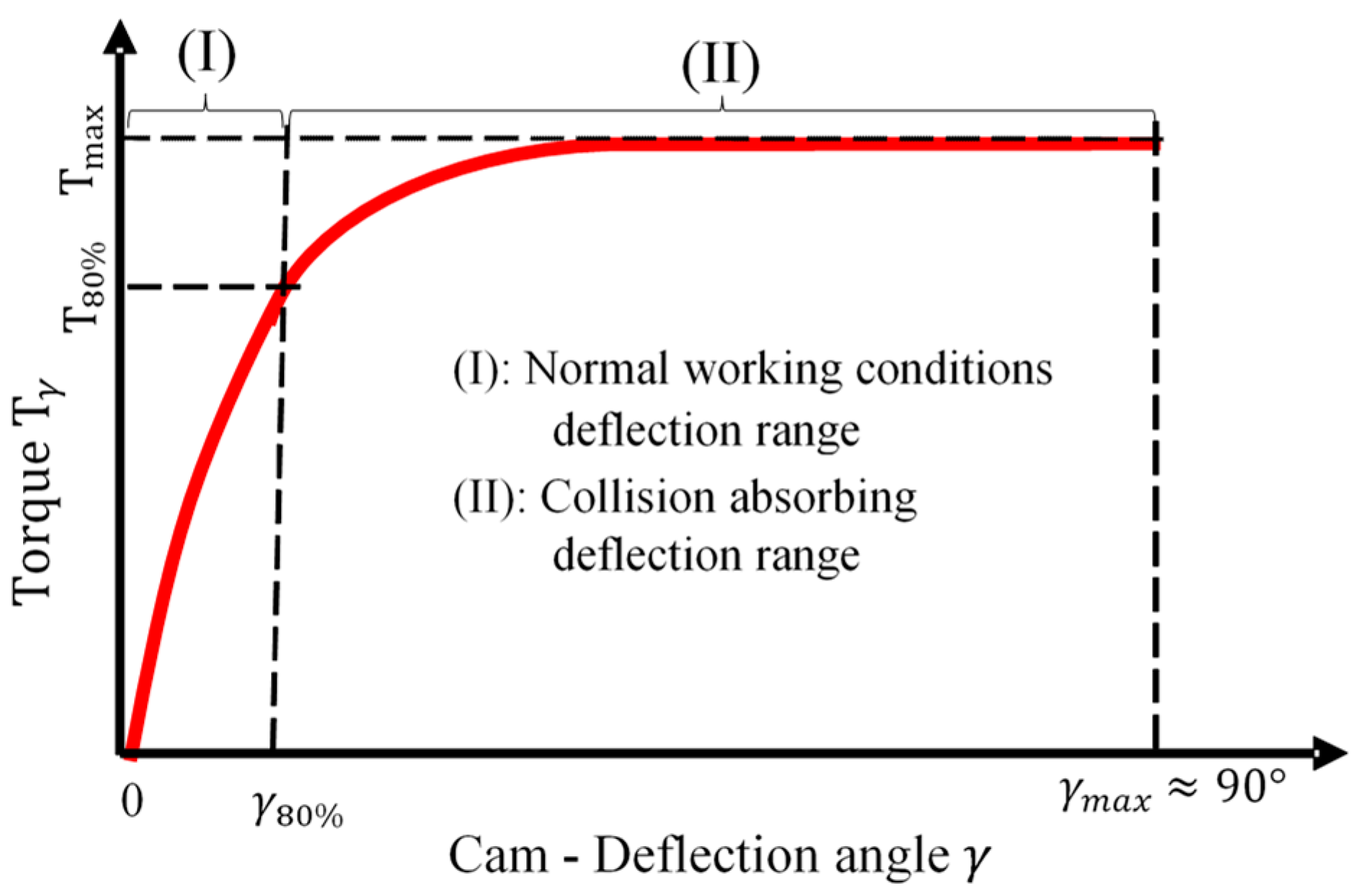
- The stiffness sharply sinks to maintain, theoretically as shown in Figure 5, a constant torque threshold in the case of collision.
- The torque threshold, , is tunable according to load variation.
2. V2SOM’s Working Principle
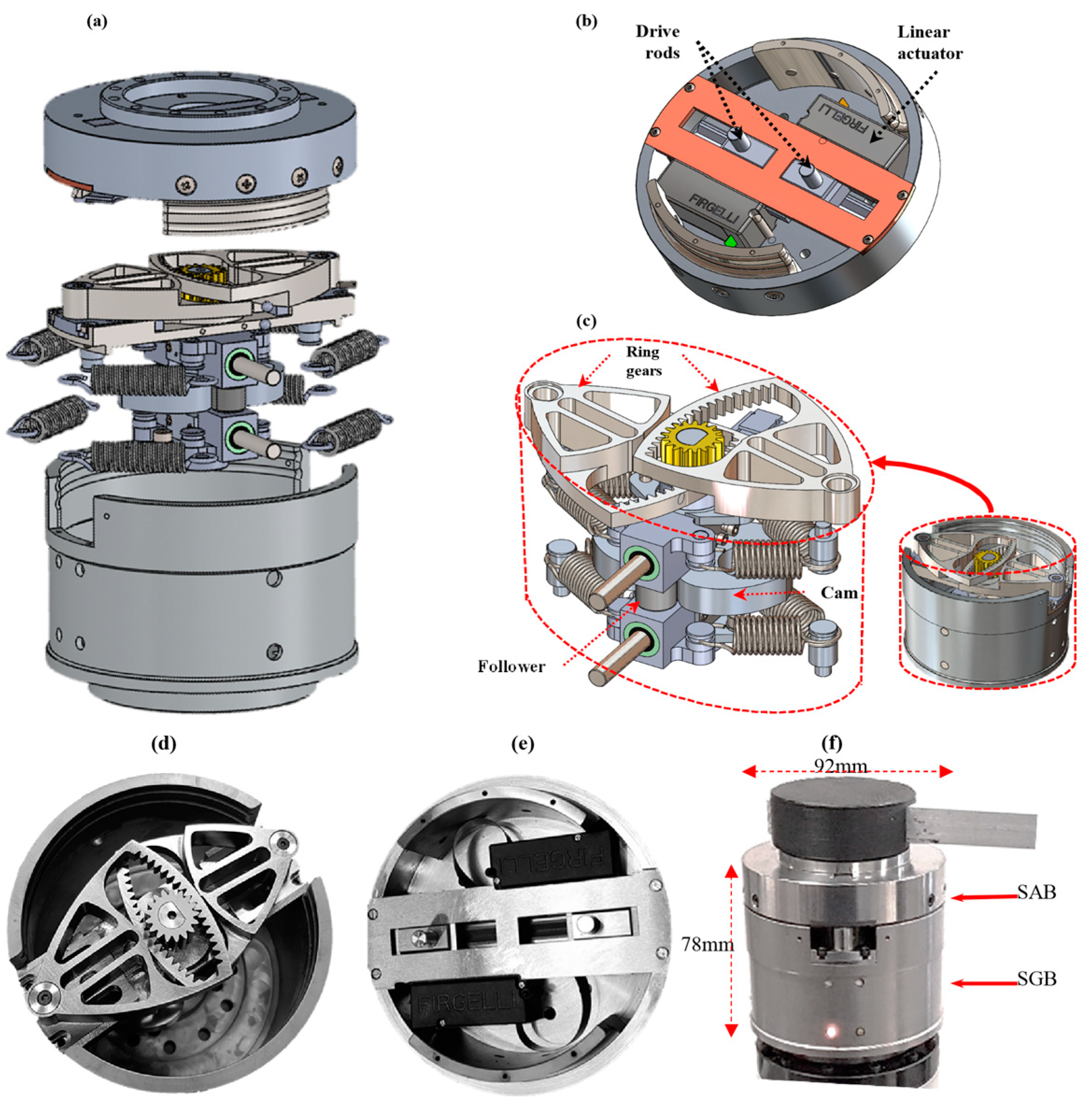
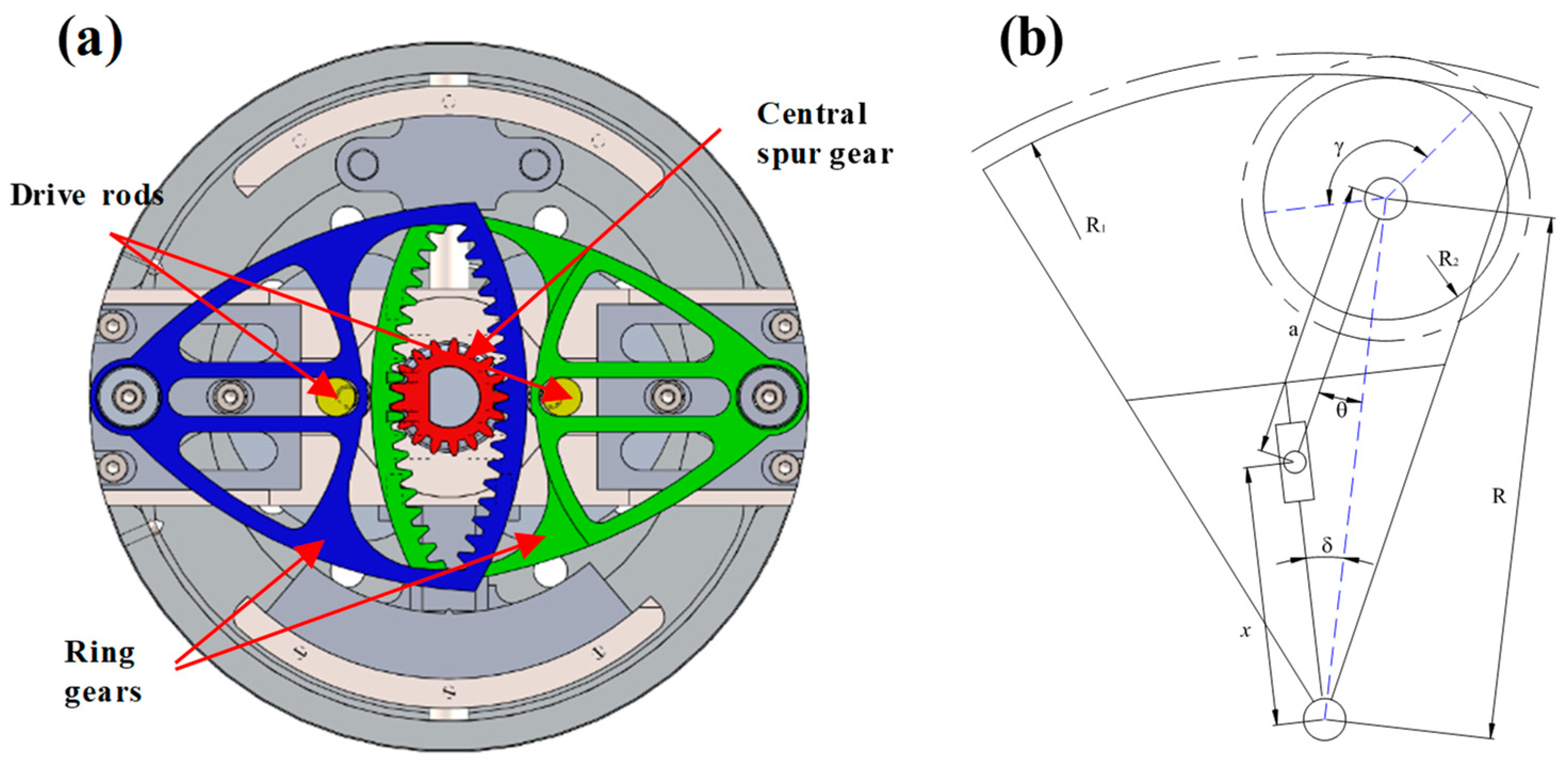
2.1. Architecture Description
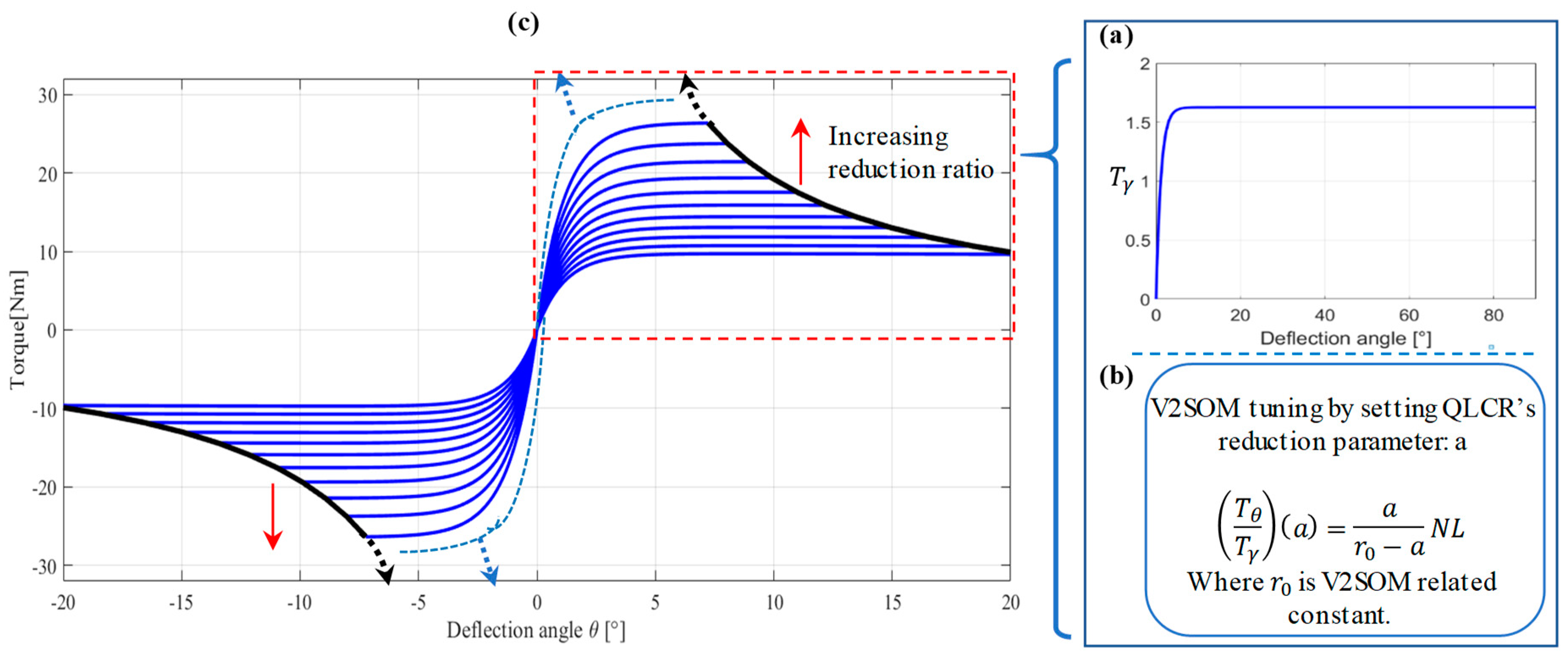
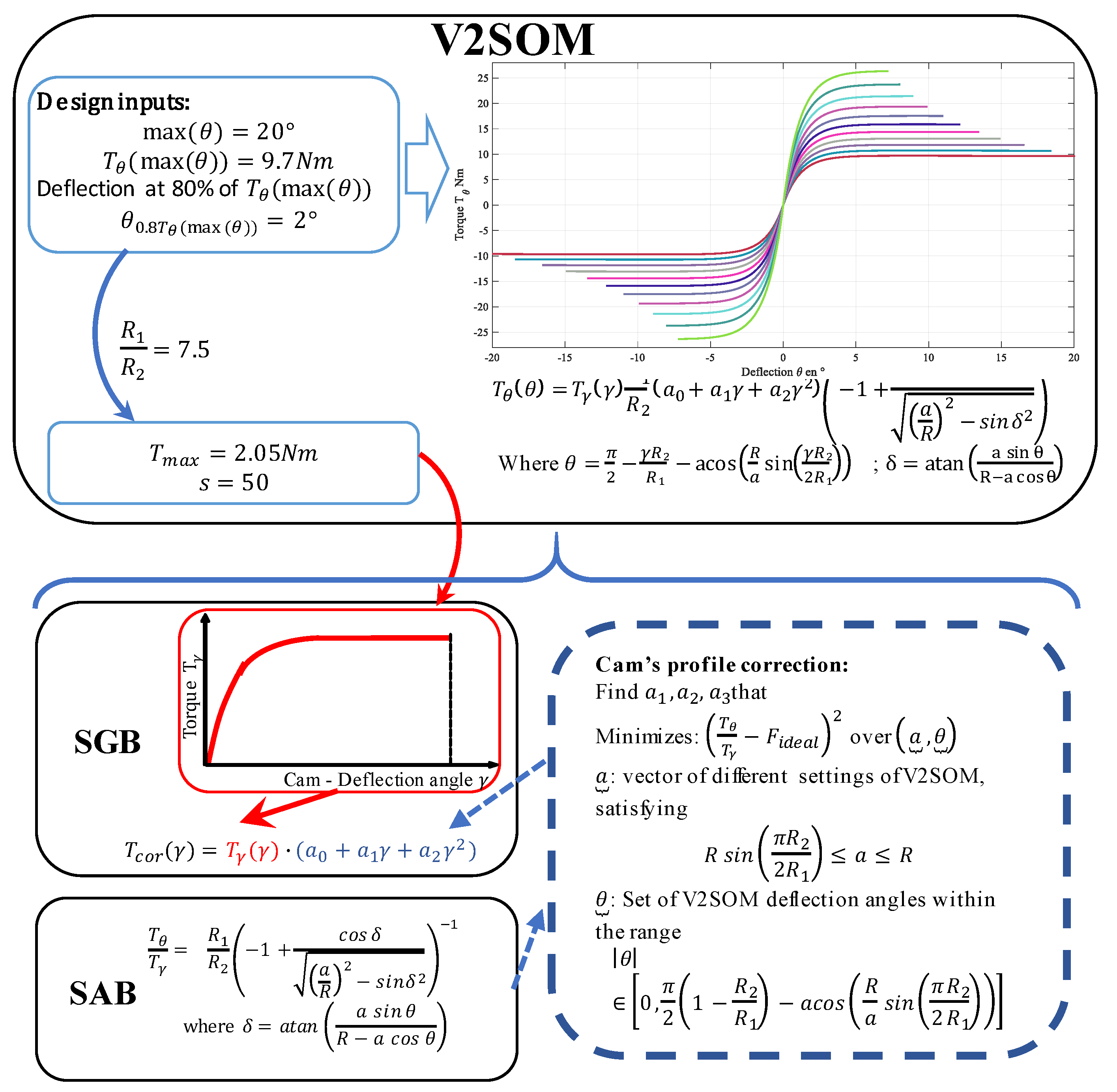
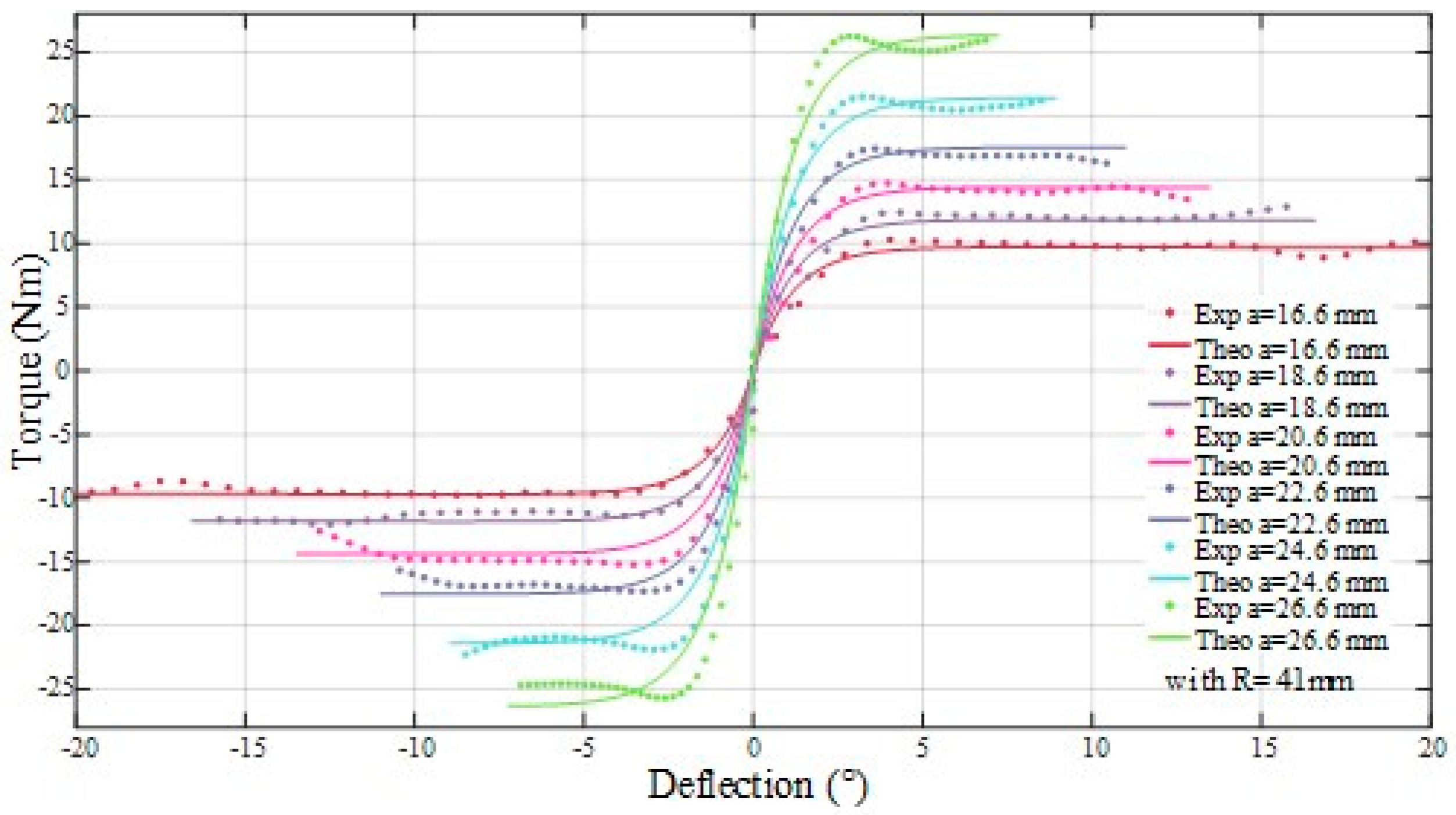
- The SGB is characterized by the curve of the torque vs. the deflection angle . This curve is obtained through the cam profile, the followers. and other design parameters. The basic torque curve leading to the torque characteristic of the V2SOM is depicted in Figure 4a. This basic curve is elaborated with a torque threshold equal to , for the present prototype.
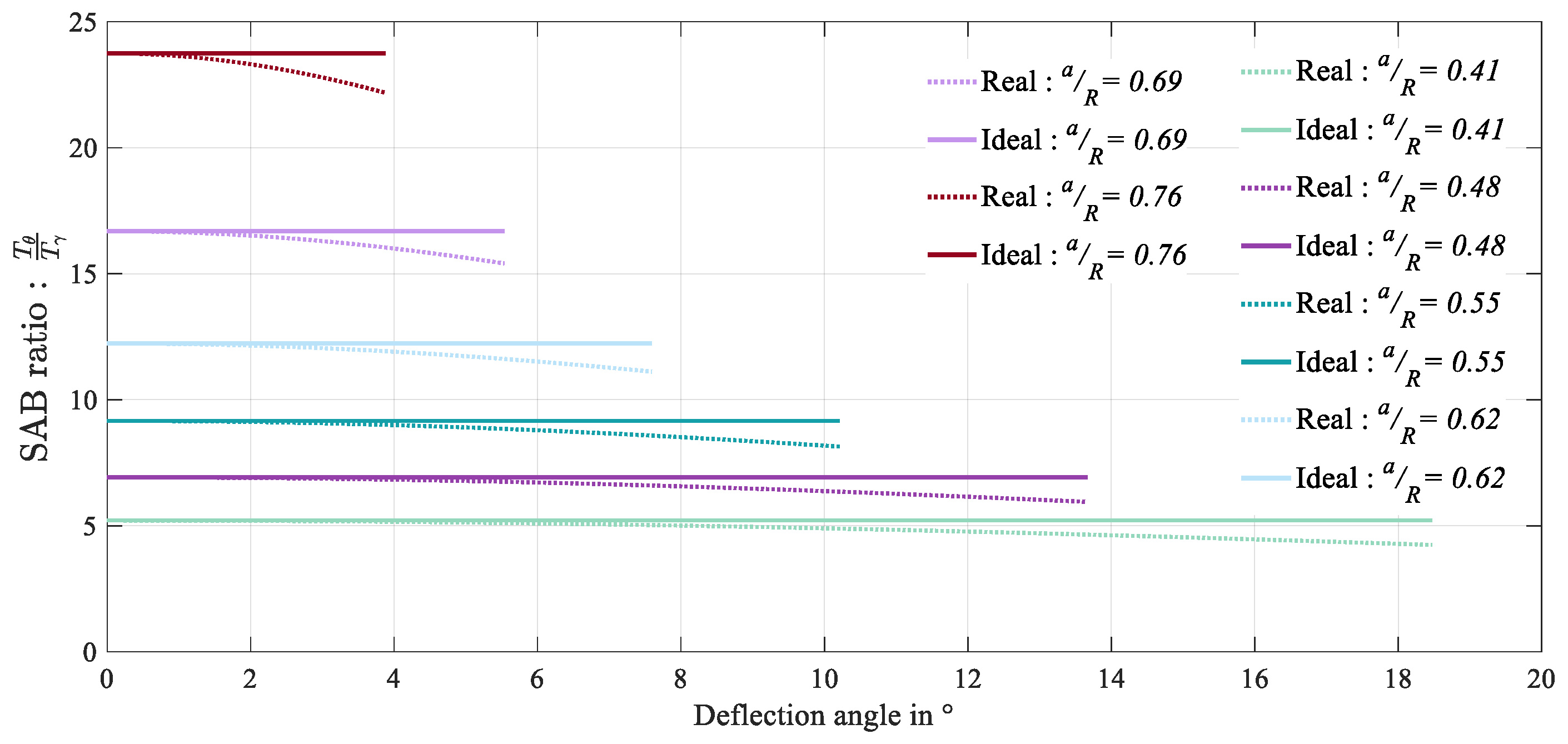
- The SAB is considered as a quasi-linear continuous reducer (QLCR) and defined by its ratio expression given in Figure 4b. The ratio is a function of the nonlinear (NL) factor, deflection angle , and reducer’s tuning parameter . The NL factor is linked to the SAB’s internal parameters and can be approximated with a constant when the deflection range is between and ; this issue will be discussed in the next section.
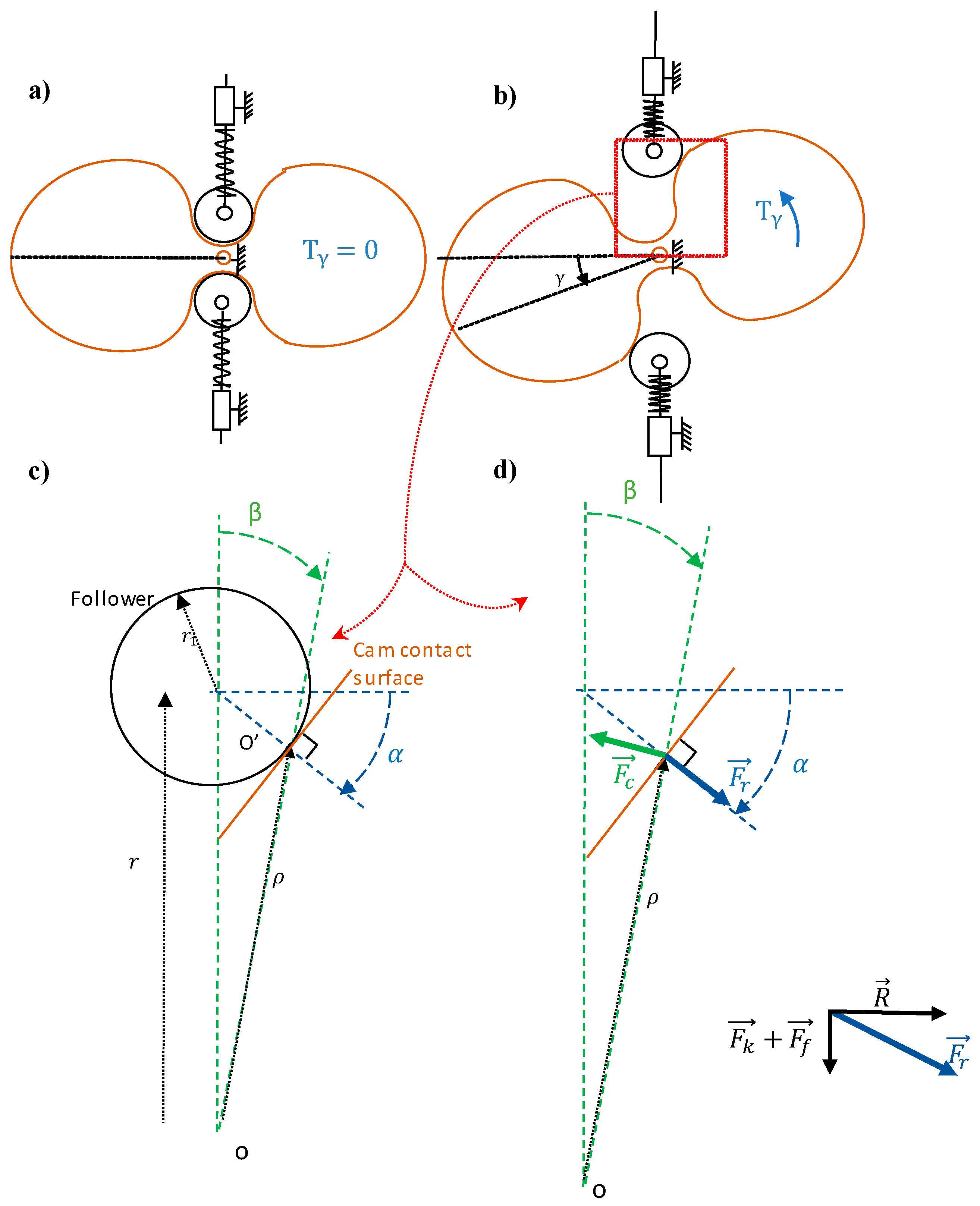
2.2. Stiffness Generator Block (SGB)
- : Distance among the rotation center, point , and contact point of the cam-follower.
- : Follower’s radius.
- : Distance of the follower’s center, point , to the cam’s rotation center. The rest value is .
- : Resultant force at the cam-follower contact.
- : Component of in charge of deflection torque . The relations can be written as follows:
- : Friction force at the slider supporting the follower.
- : Compression force of the spring.
- : Force applied on the slider perpendicular to its axis.
2.3. Stiffness Adjusting Block (SAB)
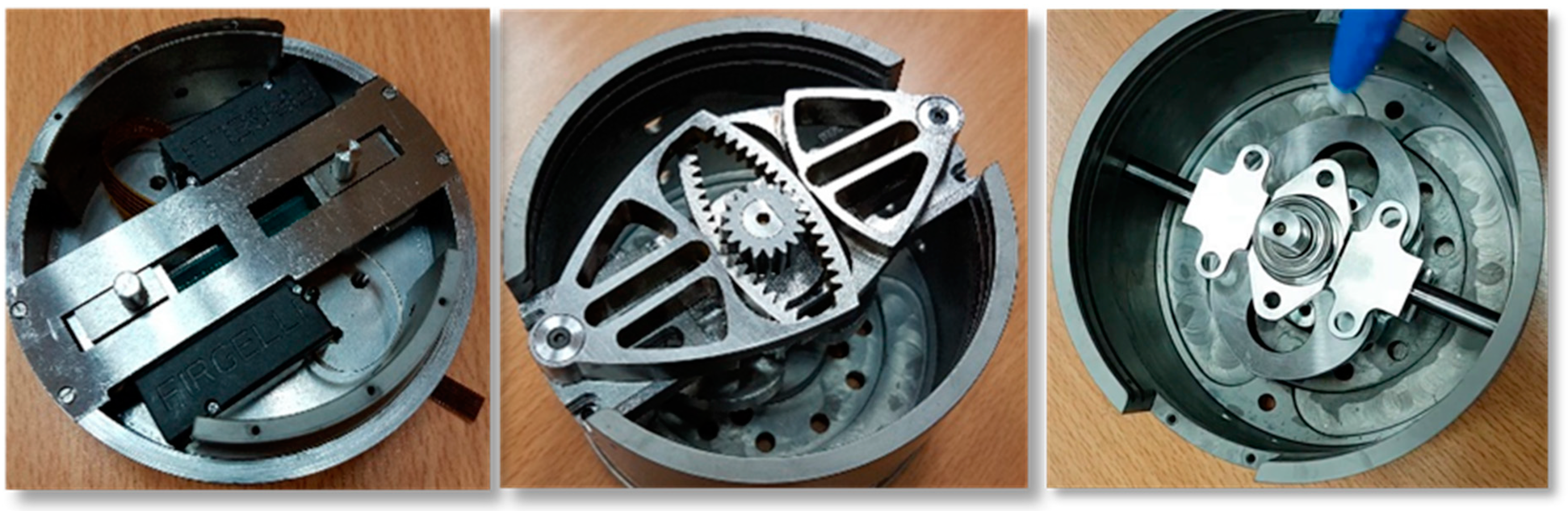
3. V2SOM’s Prototype
4. Performance Evaluation: V2SOM vs. Constant Stiffness
4.1. Safety Criteria
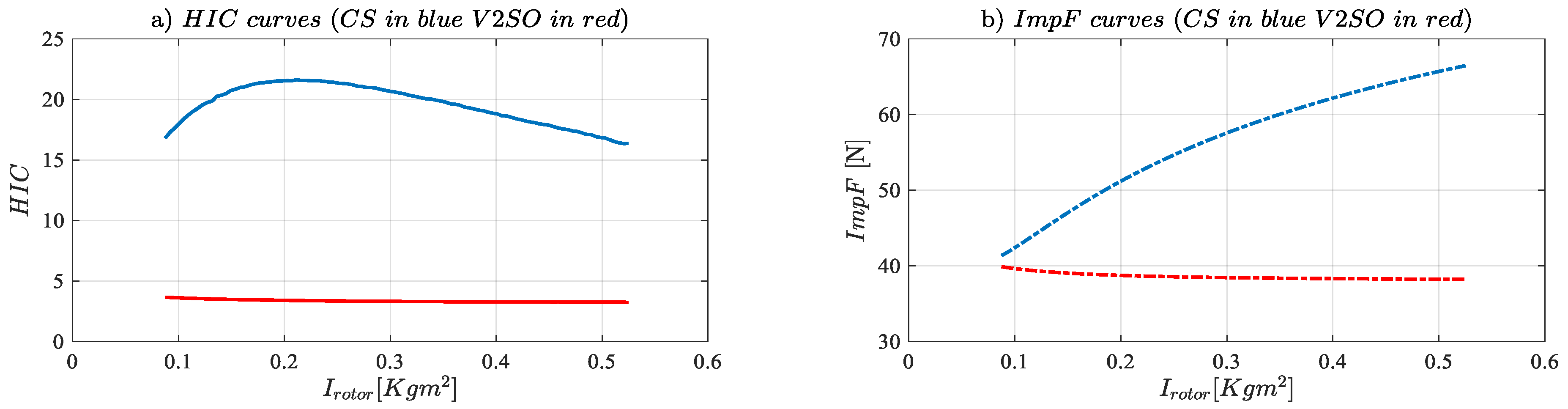
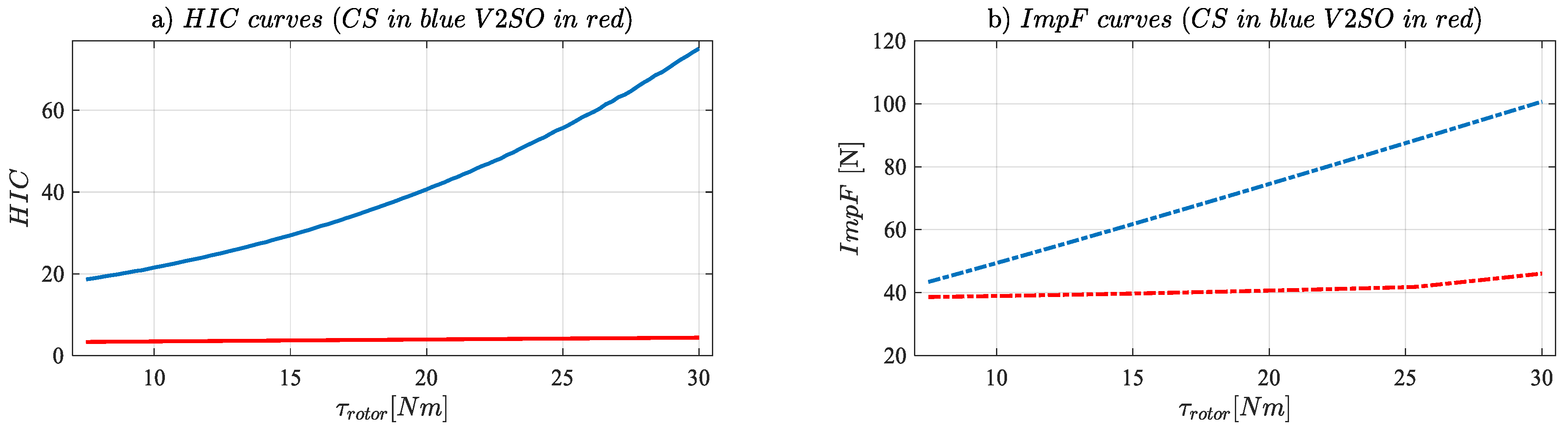
- ImpF (also known as contact force): this criterion is quite interesting as it can be applied to the whole-body regions. The contact force value is computed for a specific contact surface with a minimum 2.70 cm² area.
- Compression criterion (CompC): this criterion reflects a damaging effect of human–robot (HR) collision by means of a deformation depth, mainly considered for the compliant regions such as chest and belly.
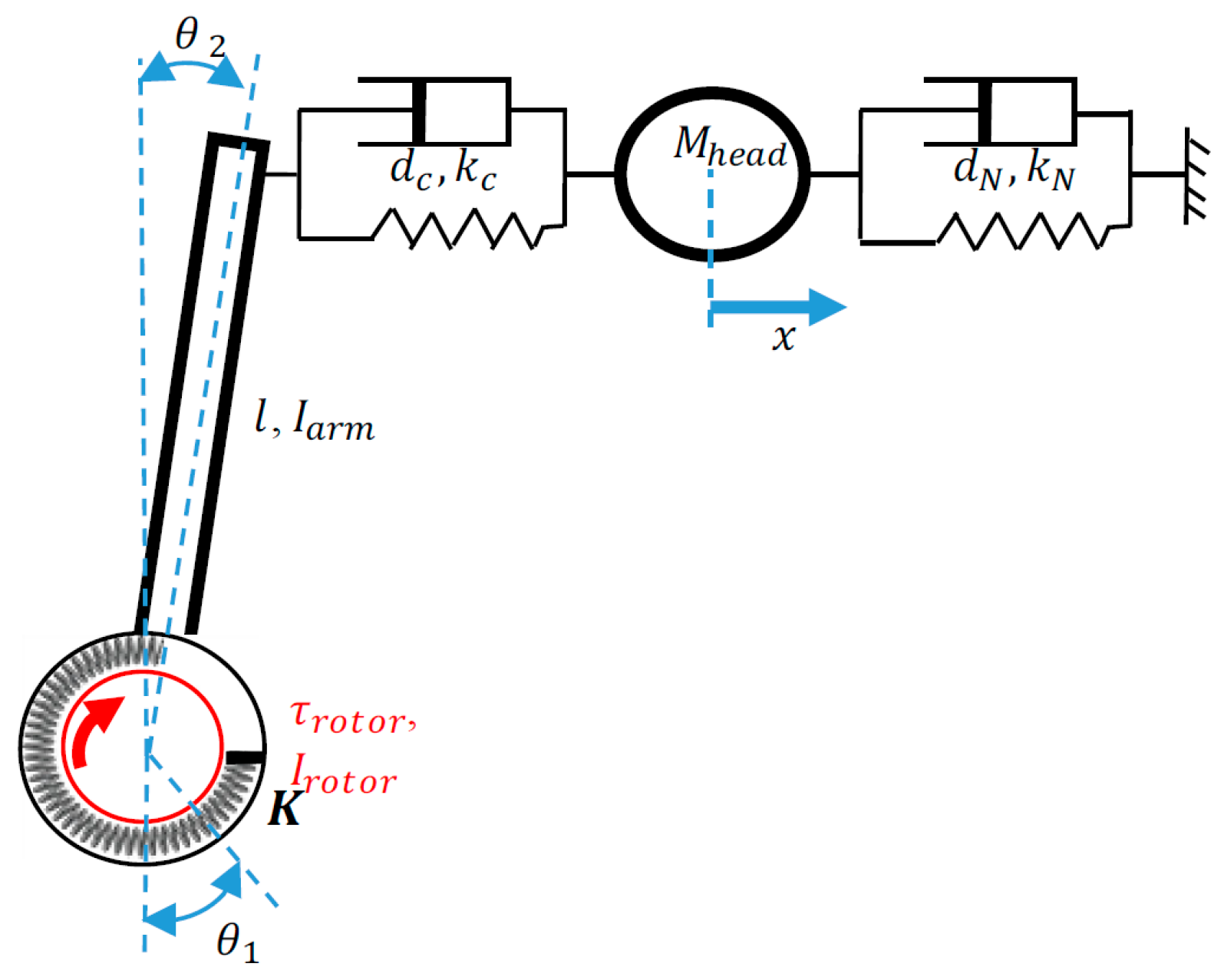
4.2. Human–Robot Collision Model
- Neck viscoelastic parameters , ;
- Head’s mass and linear displacement ;
- Contact surface viscoelastic parameters , ;
- Robot arm contact position and inertia ;
- Rotor inertia , torque and angular position ;
- Stiffness of the variable stiffness mechanism K and angular deflection .
4.3. Simulation Results of HR Collision
5. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khatib, O.; Yokoi, K.; Brock, O.; Chang, K.; Casal, A. Robots in human environments: Basic autonomous capabilities. Int. J. Robot. Res. 1999, 18, 684–696. [Google Scholar] [CrossRef]
- Tobe, F. Why Co-Bots Will Be a Huge Innovation and Growth Driver for Robotics Indus-try. Available online: http://spectrum.ieee.org/automaton/robotics/industrial-robots/collaborative-robots-innovation-growth-driver (accessed on 30 December 2015).
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef]
- Park, J.J.; Haddadin, S.; Song, J.B.; Albu-Schäffer, A. Designing optimally safe robot surface properties for minimizing the stress characteristics of human-robot collisions. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5413–5420. [Google Scholar]
- Fritzsche, M.; Elkmann, N.; Schulenburg, E. Tactile sensing: A key technology for safe physical human robot interaction. In Proceedings of the 6th International Conference on Human-Robot Interaction (HRI’11), Lausanne, Switzerland, 6–9 March 2011; ACM: New York, NY, USA, 2011; pp. 139–140. [Google Scholar]
- Chiaverini, S.; Siciliano, B.; Villani, L. A survey of robot interaction control schemes with experimental comparison. IEEE/ASME Trans. Mech. 1999, 4, 273–285. [Google Scholar] [CrossRef]
- Bicchi, A.; Tonietti, G.; Bavaro, M.; Piccigallo, M. Variable stiffness actuators for fast and safe motion control. Robot. Res. 2005, 527–536. [Google Scholar]
- Grioli, G.; Wolf, S.; Garabini, M.; Catalano, M.; Burdet, E.; Caldwell, D.; Carloni, R.; Friedl, W.; Grebenstein, M.; Laffranchi, M.; et al. Variable stiffness actuators: The user’s point of view. Int. J. Rob. Res. 2015, 34, 727–743. [Google Scholar] [CrossRef]
- Jianbin, H.; Zongwu, X.; Minghe, J.; Zainan, J.; Hong, L. Adaptive Impedance-controlled Manipulator Based on Collision Detection. Chin. J. Aeronaut. 2009, 22, 105–112. [Google Scholar] [CrossRef]
- Gao, D.; Wampler, C.W. Assessing the Danger of Robot Impact. IEEE Robot. Autom. Mag. 2009, 16, 71–74. [Google Scholar] [CrossRef]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, pp. 399–406. [Google Scholar]
- Mathijssen, G.; Cherelle, P.; Lefeber, D.; Vanderborght, B. Concept of a Series-Parallel Elastic Actuator for a Powered Transtibial Prosthesis. Actuators 2013, 2, 59–73. [Google Scholar] [CrossRef]
- Zinn, M.; Roth, B.; Khatib, O.; Salisbury, J.K. A New Actuation Approach for Human Friendly Robot Design. Int. J. Rob. Res. 2004, 23, 379–398. [Google Scholar] [CrossRef]
- Wolf, S.; Grioli, G.; Eiberger, O.; Friedl, W.; Grebenstein, M.; Höppner, H.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.G.; et al. Variable Stiffness Actuators: Review on Design and Components. IEEE/ASME Trans. Mechatron. 2016, 21, 2418–2430. [Google Scholar] [CrossRef]
- Ayoubi, Y.; Laribi, M.A.; Courrèges, F.; Zeghloul, S.; Arsicault, M. A Complete Methodology to Design a Safety Mechanism for Prismatic Joint Implementation. IEEE/RSJ Int. Conf. Intell. Robot. Syst. 2016, 304–309. [Google Scholar]
- Ayoubi, Y.; Laribi, M.A.; Zeghloul, S.; Arsicault, M. Design of V2SOM: The Safety Mechanism for Cobot’s Rotary Joints. In Mechanism Design for Robotics. MEDER 2018. Mechanisms and Machine Science; Gasparetto, A., Ceccarelli, M., Eds.; Springer: Cham, The Netherlands, 2019; Volume 66. [Google Scholar]
- López-Martínez, J.; García-Vallejo, D.; Giménez-Fernández, A.; Torres-Moreno, J.L. A Flexible Multibody Model of a Safety Robot Arm for Experimental Validation and Analysis of Design Parameters. J. Comput. Nonlinear Dyn. 2013, 9, 1–9. [Google Scholar] [CrossRef]
- Flacco, F.; de Luca, A. Residual-based stiffness estimation in robots with flexible transmissions. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5541–5547. [Google Scholar]
- Cirillo, A.; de Maria, G.; Natale, C.; Pirozzi, S. A mechatronic approach for robust stiffness estimation of variable stiffness actuators. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 399–404. [Google Scholar]
- Ayoubi, Y.; Laribi, M.A.; Arsicault, M.; Zeghloul, S.; Courreges, F. Mechanical Device with Variable Compliance for Rotary Motion Transmission, FR/IFBT17CNRCOB. 2017; France.
- Petit, F.; Friedl, W.; Hannes, H.; Grebenstein, M. Antagonistic Variable Stiffness Mechanism. Trans. Mechatron. 2015, 20, 684–695. [Google Scholar] [CrossRef]
- Eiberger, O.; Haddadin, S.; Weis, M.; Albu-Schäffer, A.; Hirzinger, G. On joint design with intrinsic variable compliance: Derivation of the DLR QA-joint. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3–8 May 2010; pp. 1687–1694. [Google Scholar]
- Hyun, D.; Yang, H.S.; Park, J.; Shim, Y. Variable stiffness mechanism for human-friendly robots. Mech. Mach. Theory 2010, 45, 880–897. [Google Scholar] [CrossRef]
- Bicchi, A.; Tonietti, G. Fast and ‘soft-arm’ tactics. IEEE Robot. Autom. Mag. 2004, 11, 22–33. [Google Scholar] [CrossRef]
- Firgelli. Available online: http://www.firgelli.com (accessed on 5 January 2019).

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayoubi, Y.; Laribi, M.A.; Zeghloul, S.; Arsicault, M. V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints. Robotics 2019, 8, 18. https://doi.org/10.3390/robotics8010018
Ayoubi Y, Laribi MA, Zeghloul S, Arsicault M. V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints. Robotics. 2019; 8(1):18. https://doi.org/10.3390/robotics8010018
Chicago/Turabian StyleAyoubi, Younsse, Med Amine Laribi, Said Zeghloul, and Marc Arsicault. 2019. "V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints" Robotics 8, no. 1: 18. https://doi.org/10.3390/robotics8010018
APA StyleAyoubi, Y., Laribi, M. A., Zeghloul, S., & Arsicault, M. (2019). V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints. Robotics, 8(1), 18. https://doi.org/10.3390/robotics8010018