1. Introduction
With the rapid advancements in robotics and emerging technologies, nonholonomic wheeled mobile robots (NWMRs) are increasingly being deployed in real-world applications [
1,
2]. Despite significant progress in single-robot systems, several challenges remain, including limited capacity, reduced stability, and restricted flexibility in hazardous environments. To address these limitations, multi-robot systems have garnered considerable attention due to their enhanced productivity, scalability, and reliability. In particular, multi-robot systems exhibit effective performance when undertaking complex, unmanned missions. As a result, there has been growing research interest in the formation control of NWMR teams to achieve coordinated behaviors and maintain desired formations [
3]. These studies have demonstrated promising outcomes across a range of applications, including surveillance, military missions, environmental monitoring, swarm guidance, heavy load transport, and collaborative exploration in unknown terrains [
4,
5]. A recent study involving the Mitsubishi RV-2AJ robotic arm [
6] utilized Euler–Lagrange-based modeling combined with hybrid control strategies employing PID and Adaptive Neuro-Fuzzy Inference System (ANFIS) controllers. The ANFIS controller outperformed the PID controller by offering better adaptability and trajectory tracking accuracy, underscoring the advantages of advanced modeling and intelligent control methods in enhancing robotic system performance.
In general, the key challenge of NWMR is to achieve the desired geometric pattern where each robot goes towards the predefined trajectory and maintains the relative distance. There are many multi-robot control methods in the literature, including the behavior-based approach [
7], the virtual-based approach [
8,
9], the artificial potential approach [
10], and the leader–follower formation [
3] (see the
Table 1). The behavior-based approach is inspired by the behaviors of nature, such as the random walks of ants, a group of birds, and fish behavior in a lake. In this approach, the goal is obtained by dividing tasks into sub-tasks, and each task is performed as a low-level action [
7]. Moreover, this approach has had difficulty in ensuring stability due to its mathematical model construction. In contrast, the virtual framework technique treats the entire fleet of robots as a rigid body, ensuring the formation and coordinated movement of multiple mobile robots. However, this strategy imposes a significant communication and processing overhead, making it unsuitable for a larger group. Conversely, the leader–follower formation strategy is a decentralized structure for multi-robots that is simple to build mathematically and has low computational complexity. This approach has been commonly employed in real-world experiments due to its reliability, flexibility, and adaptability. Hence, the leader–follower approach is widely applied in different hazardous environments. Typically, the formation is composed of one leader and several followers, with the followers adhering to a specific pattern and maintaining a fixed distance from the leader as they follow its trajectory. In the recent development of multiple NWMRs, some interesting outcomes of the leader–follower formation results have been published in the literature [
1,
3,
11]. The research in [
1] proposes a control approach for managing multiple mobile robots in a leader–follower formation, aimed at enhancing vision-based control systems. Based on [
1], the formation problem for multiple NWMR has been researched in [
2], where control inputs are compelled to meet certain constraints to ensure the maintenance of the desired formation. In addition, the author in [
11] presents a bio-inspired neurodynamics method for the leader–follower formation of multiple NWMRs to address the issue of velocity jumps. On the other hand, ref. [
3] introduced connectivity-maintaining obstacle avoidance approaches with communication and sensing ranges. Due to these facts, the multiple NWMRs have some limitations in maintaining the communication between the robots, when the number of followers has increased results in difficulty to acquire the leader’s information.
To address this issue, recently, several recent studies have been examined for the distributed formation control of multiple NWMRs related to the communication constraints problem in [
12,
13,
14,
15,
16,
17,
18,
19]. In [
12], the authors designed a distributed controller using the small-gain approach, which relies on both static and time-varying relative position sensing in a digraph. Similarly, the distributed formation control for multiple NWMRs has been presented in [
13] to guarantee the prescribed formation by considering the velocity constraints without using the global posture measures. Furthermore, ref. [
14] proposes a distributed adaptive control law for a dynamic model with unknown parameters to achieve leader–follower formation. Lu et al. [
15] devised a formation control method using a distributed estimator to overcome communication constraints, allowing followers to estimate the leader’s information through local interactions. In [
16], a distributed Proportional–Integral Data-Driven Iterative Learning Control (PI-DDILC) algorithm is developed to address the formation control problem of nonholonomic, velocity-constrained NWMRs operating in repeatable environments. Furthermore, Zhang et al. [
17] introduced a distributed formation control for multiple NWMR without considering the position measurements to solve the slippage problems. Specifically, the author in [
18] have proposed distributed formation control via a bio-inspired neurodynamic approach for multiple nonholonomic robot systems. Most recently, the authors of [
19], developed a formation tracking control strategy using distributed observers and an adaptive leader controller to enable robust trajectory tracking for multiple robots under slippage constraints. Note that these methods show good tracking performance with the leader–follower method, where the desired formation is achieved. However, these NWMRs systems still have low-efficiency problems, and it is necessary to satisfy some constraints on the desired velocity.
To tackle these challenges, control strategies grounded in the cascaded theory have been introduced, as discussed in [
20,
21]. In [
20], the authors have designed a controller using sliding mode control (SMC) to increase the speed of the convergence time. To develop a robust cascaded system for the NWMR, ref. [
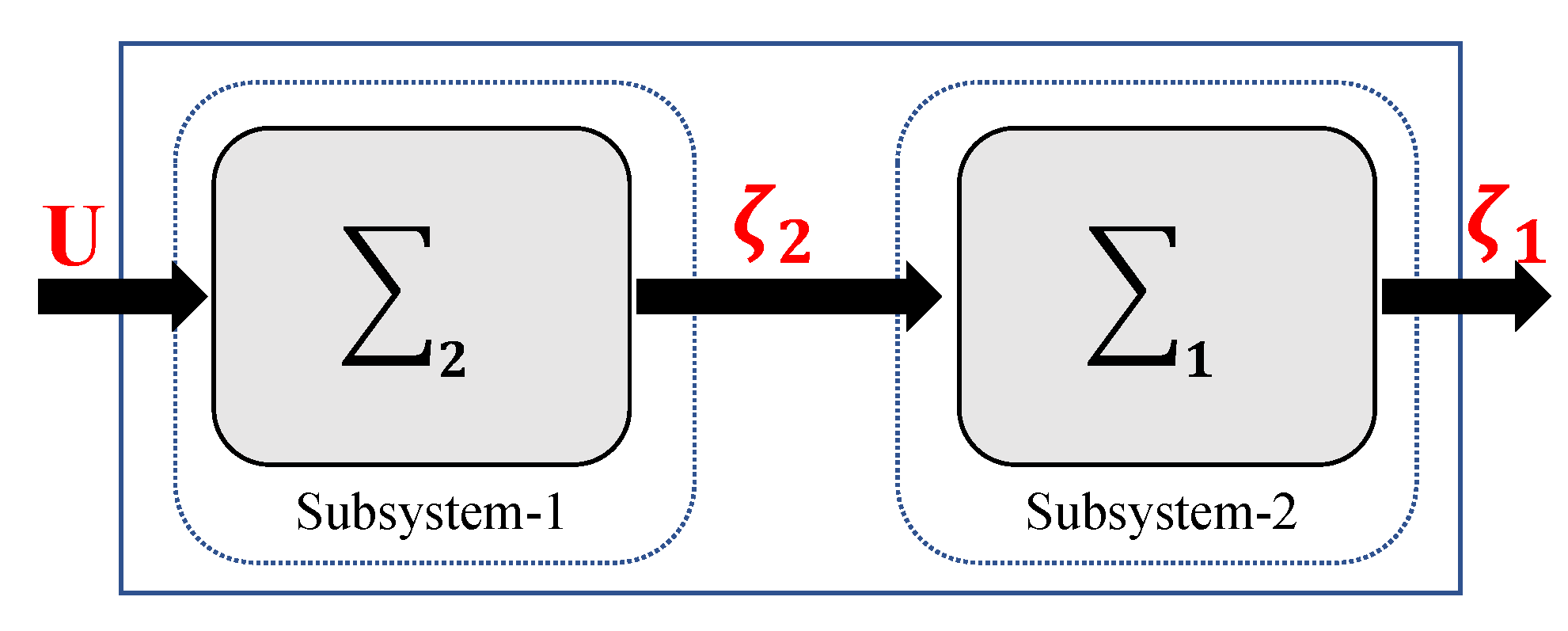
21] introduces a continuous SMC along with two nonlinear disturbance observers. Therefore, in this work, we adopt the cascade theory for the multiple NWMRs’ system control design. The cascade control theory is particularly effective for hierarchical and modular multi-robot control problems such as leader–follower formations. It enables decomposition of the overall system into subsystems—one for the leader’s trajectory tracking and another for the follower’s formation maintenance. This modularity simplifies both the controller design and stability analysis. The control design is divided into two components: one focuses on enabling the leader robot to track the reference path, while the other ensures that the follower robots maintain the target formation and follow the leader. Another major advantage of the cascade approach is that it supports scalability and robustness. It allows the follower subsystem to estimate leader states using only local communication, avoiding reliance on global information, which is often assumed in consensus-based or centralized approaches. Additionally, the use of the Lyapunov theory within the cascade framework facilitates rigorous stability guarantees for each subsystem and their interconnection. For these two sections, the global control law is used to stabilize one subsystem. Moreover, another subsystem is stabilized by the SMC designed for the leader. In order to keep the formation pattern, PD control is also employed for follower robots to relax the severe limits on the intended velocities.
Building upon the above investigations, this work focuses on designing a control scheme for leader–follower formation of multiple NWMRs using a distributed estimator-based cascade control framework. In this approach, each follower robot employs a distributed estimator to reconstruct the leader’s state information. The main contributions of this study are summarized as follows:
A distributed estimator-based leader–follower formation control scheme is proposed for a swarm of multiple NWMRs.
A sliding mode control (SMC) law is developed for the leader robot based on the cascade theory.
A distributed estimator–controller is designed for each follower to estimate the leader’s position, orientation, linear velocity, and angular velocity.
Lyapunov stability and cascade system theory are used to guarantee closed-loop error convergence. Theoretical results are validated through comprehensive simulation experiments.
4. Numerical Simulation Results
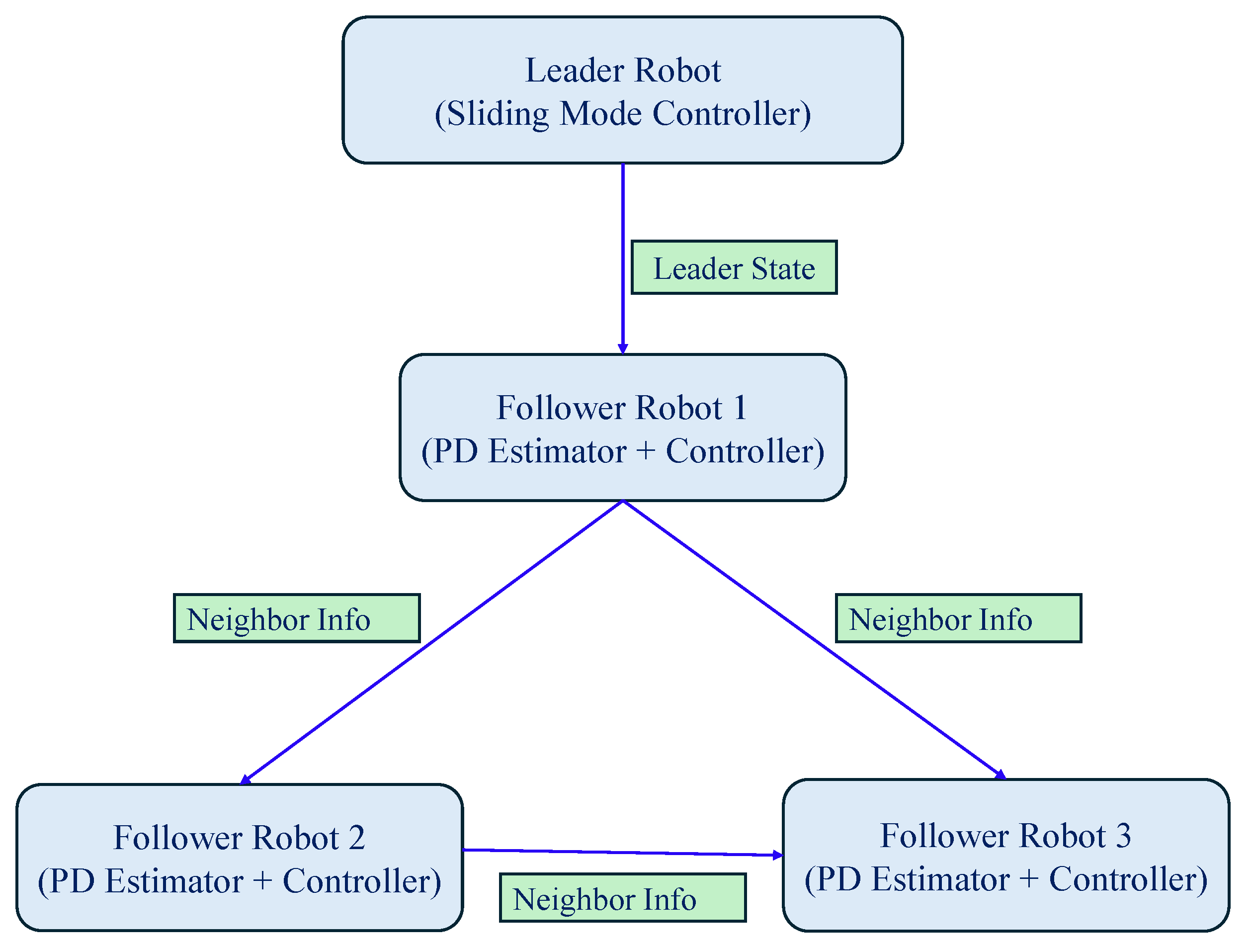
The numerical simulation results were conducted using MATLAB 2021a to demonstrate the efficiency and performance of the proposed formation controllers. Hence, we present the simulation results based on the leader–follower approach using multiple NWMRs. The communication topology among the multiple NWMRs is a directed graph
which is shown in
Figure 4. Moreover, the formation forms a desired pattern by three followers
,
,
, which follow the leader
. The simulation results are summarized in two sections. The first section demonstrates the results of the leader robot using designed leader control inputs (
25). Another section demonstrates the result of multiple followers along with the desired triangular formation using the distributed estimator-based formation controllers (
61). The proposed control system parameters, communication models, and robot dynamics are listed in the
Table 2.
Section 1: The leader robot control inputs have been designed by using the reference robot ’s information. The parameters of the reference robots are as follows. The initial position of the reference robot is and the its linear velocity and angular velocity are set as and , respectively.
The leader robot
starts from the initial position
. Moreover, we set the control parameter values for the proposed controller as
,
and
. We have simulated the leader NWMR system with the tracking controllers (
37) and (
25) and the obtained results are shown in
Figure 6,
Figure 7,
Figure 8 and
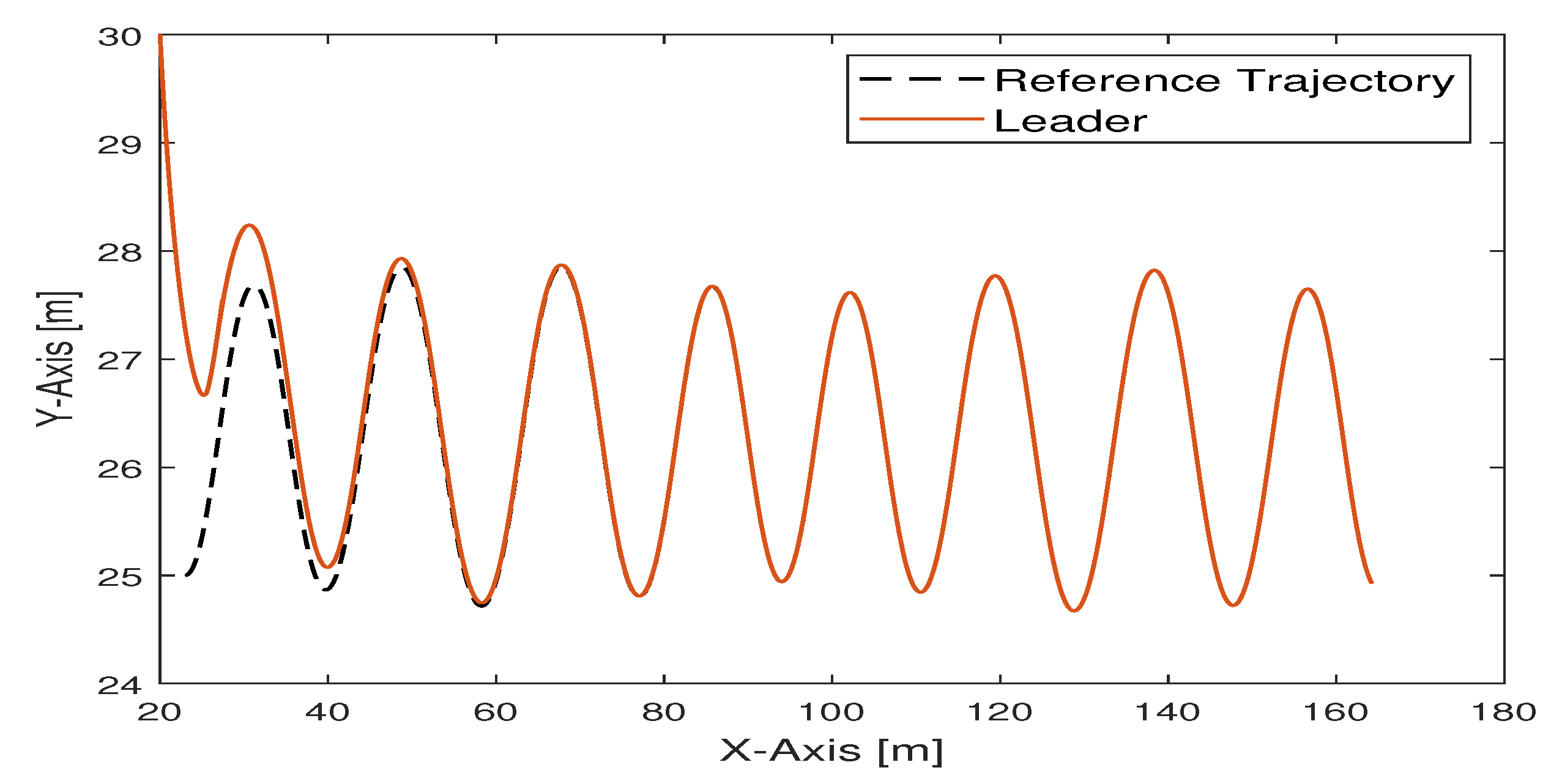
Figure 9. From these simulation results,
Figure 6 illustrates the trajectory of the leader
which follows the trajectory of reference
. The proposed controllers (
37) and (
25) guide the leader to follow the reference trajectory when a leader starts from a different position.
Figure 7 denotes the tracking error of the
, which converges to zero over time.
Figure 8 shows the linear and angular velocities of robots
and
. Furthermore, the asymptotically convergence of the linear and angular velocity control error is shown in
Figure 9.
Section 2: In this work, for the simulation purpose, the formation has been considered for a group of four NWMRs comprised of one leader and three followers, as shown in
Figure 4. The values of the three follower initial positions are set as
,
, and
. In addition, the linear and angular velocities of the leader referred to the previously designed controllers (
37) and (
26). The goal of our method is to develop the desired triangular formation of followers and follow the leader at the desired distance. Therefore, the desired relative distances of the followers are set as
,
,
,
,
,
. Due to the communication problem, in this work, we proposed the distributed estimator (
43) and its parameters are set to
,
,
, and
. Moreover, the control gain of the proposed control laws (
69) and (
61) are set as
,
,
. The simulation results of the follower’s proposed control strategy are presented in
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
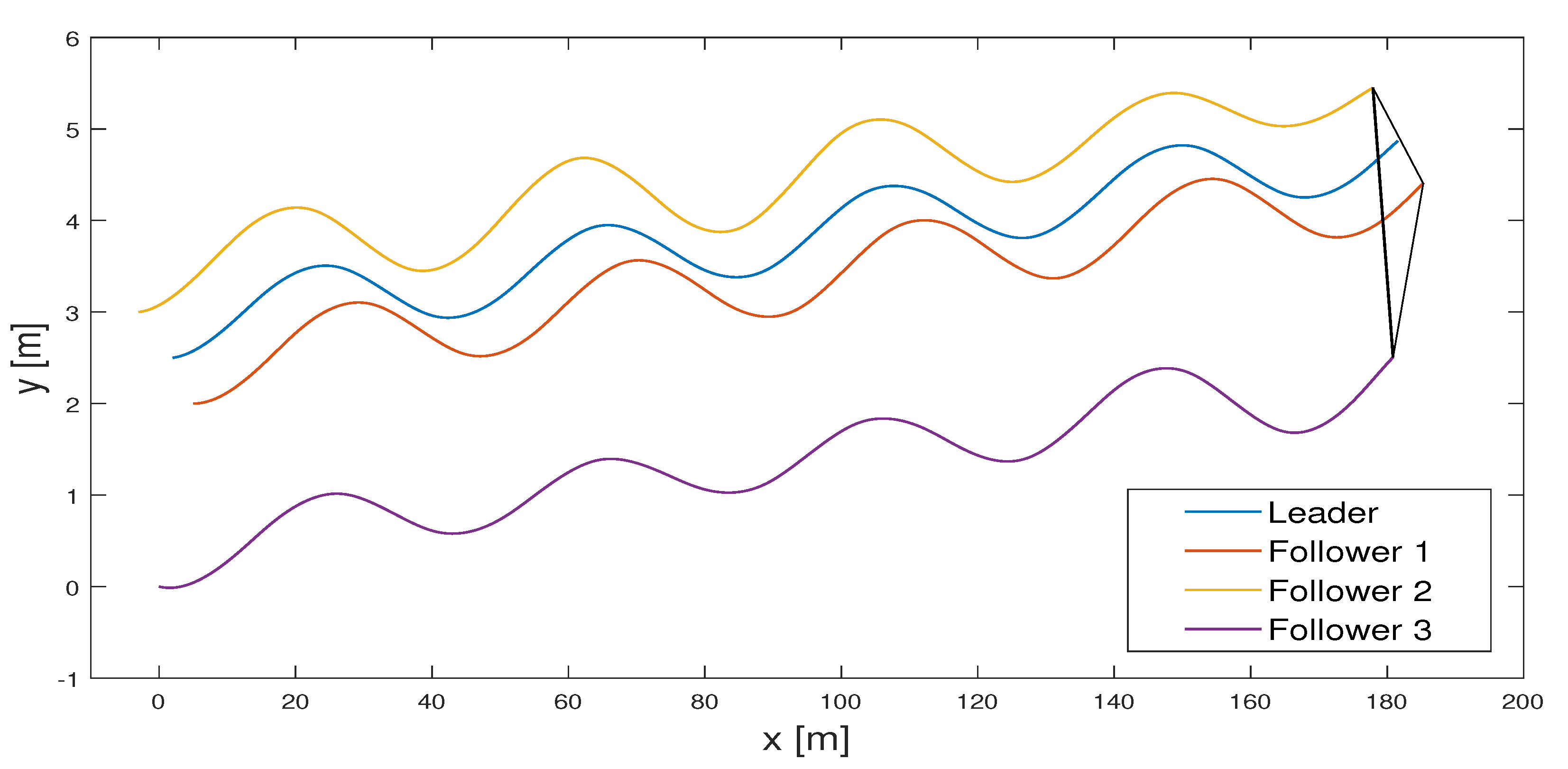
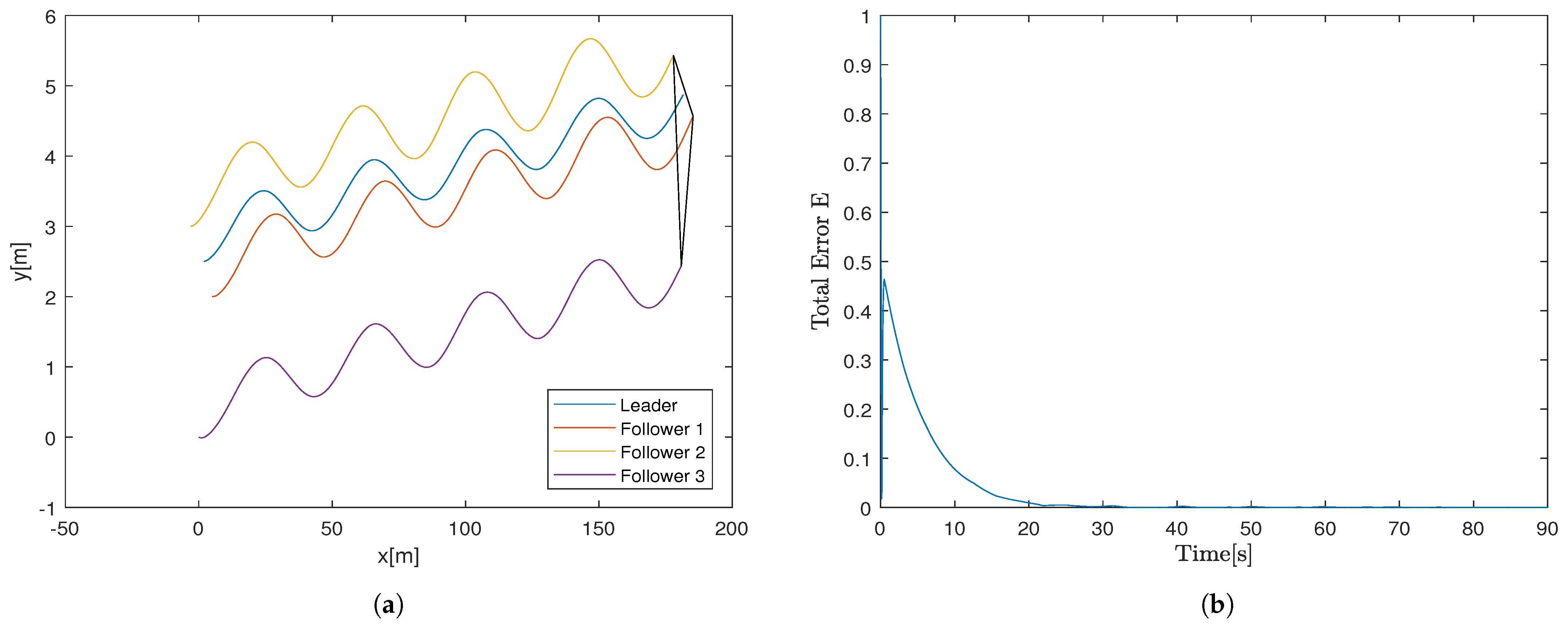
Figure 15. The trajectory tracking results of multiple NWMRs using the estimators and proposed control laws (
37) and (
26) are shown in
Figure 10, where the desired triangle formation is achieved. Moreover, from
Figure 11, we observe that the linear and angular velocity of the estimation error converged to zero. In addition, each follower’s estimator predicts the relative position of the leader, as shown in
Figure 12. The estimation error of the proposed estimator (
43) is shown in
Figure 13, where the tracking errors converge to zero. Based on proposed controllers (
37) and (
26), the multiple NWMRs can achieve the desired pattern, and the formation tracking error converged to zero means that the control objectives can be achieved. Finally, from the above discussion along with results illustrated in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15, we conclude that the proposed control schemes are effectively verified.
4.1. Simulation Results on Different Formation Type
We present simulation results for a group of four NMRs including three follower robots and a virtual leader robot. The communication link between the leader and three followers is shown in
Figure 5. The main objective is to maintain a triangular formation structure along with the given reference paths. The whole parameters are shown below. The initial states of the follower robots are
,
,
. The initial state of the leader robot is considered as
. Moreover, the control inputs for the leader are set to
and
. It can be observed from
Figure 16 that the follower NMRs form a triangular structure, which is led by the leader NMR. To show the usefulness of the proposed formation control method, we consider a group of four followers and one virtual leader. The desired geometric pattern is a rectangle.
Figure 17 shows the trajectories of all robots during 0–45 s; it can be seen from the graph that the multi-robot system converges to the desired formation pattern gradually.
4.2. Sensitivity Analysis of Control Parameters and Environmental Variations
To evaluate the robustness and generalizability of the proposed distributed leader–follower control strategy, we conducted a comprehensive sensitivity analysis considering variations in leader trajectory, communication delay, and control gains. This analysis aims to demonstrate that the control approach does not overfit specific conditions and can maintain stability and acceptable tracking performance under realistic disturbances.
4.2.1. Effect of Leader Trajectory Variations
To examine the adaptability of the controller to different motion profiles, the leader robot was tested on three trajectory types: (i) a smooth linear trajectory, (ii) a circular trajectory with moderate curvature, and (iii) an aggressive sinusoidal trajectory with high curvature and varying frequency. The follower robots consistently maintained formation and demonstrated low RMSE values across all scenarios. While minor increases in tracking error were observed for the sinusoidal path due to sharp directional changes, the system preserved stability and global asymptotic convergence. These results in
Figure 18 confirm that the proposed controller generalizes well and does not rely on trajectory-specific tuning.
4.2.2. Effect of Communication Delay
To simulate real-world communication challenges, we introduced artificial delays into the inter-agent communication links, as shown in
Figure 19, with delay values ranging from 0 ms (ideal case) to 200 ms. The control system remained stable under delays up to 100 ms, with only slight degradation in tracking accuracy and increased response time. For a 200 ms delay, transient tracking errors increased marginally, but the follower robots continued to converge to the desired trajectory without violating formation constraints. This indicates that the control law’s local design and reliance on neighbor information confer robustness to moderate latency in communication, a common scenario in distributed robotic systems.
4.2.3. Effect of Control Gain Perturbations
To assess the impact of gain variations on control performance, we perturbed the nominal proportional (
) and derivative (
) gains by ±20% and ±40%. The system showed graceful degradation in tracking performance in
Figure 20 as gains deviated from their tuned values. Lower gains resulted in slower response and increased steady-state error, while higher gains introduced mild overshoot but improved responsiveness. In all cases, the formation remained intact, and the system avoided instability or oscillations, validating the wide operating margin of the controller and its insensitivity to exact gain tuning. These findings highlight the robustness and practical reliability of the proposed PD-based distributed control framework.
4.3. Ablation Analysis
To assess the contribution of key components in our proposed control architecture, we conducted an ablation study focusing on the roles of the distributed estimator and the PD (Proportional–Derivative) control terms. Specifically, we evaluated system performance under three configurations: (1) the full proposed method with both estimator and PD control; (2) removal of the distributed estimator, where followers rely only on delayed or partial leader information; and (3) removal of PD terms, using a purely proportional controller.
The ablation study plot comparing the tracking error for three controller configurations is shown in
Figure 21.
- (a)
Proposed Method (Estimator + PD): Lowest and fastest-converging error.
- (b)
Without Estimator: Higher error, slower convergence.
- (c)
Without D-Term: Moderate performance with slower error decay than the full method.
The results clearly demonstrate that the distributed estimator significantly improves tracking accuracy by mitigating communication delays and estimation uncertainties. Without it, follower robots exhibited larger tracking errors and delayed convergence. Similarly, removing the derivative term led to slower response dynamics and higher overshoot, particularly during sudden trajectory changes or disturbances. These findings validate the necessity of each component and reinforce the design choices made in our control framework.
4.4. Comparison with the Distributed Estimator-Based Controllers
A comparative analysis is performed against the control methods presented in [
13,
18] to highlight the benefits of the proposed formation control strategy. This evaluation is carried out in a leader–follower setup, involving one leader and three follower robots arranged in a triangular formation. To quantitatively evaluate the tracking performance of the formation, the total formation error is defined as
The performance comparison between the controllers from [
18] and the proposed approach is presented in
Figure 22,
Figure 23 and
Figure 24. To ensure a fair evaluation against the method in [
13], the same simulation conditions are maintained in Equations (
69) and (
61). As illustrated in
Figure 22, the referenced method delivers a commendable performance; however, it is well known that the backstepping controller may produce large initial velocity spikes and abrupt changes during sudden tracking errors, which limits its practicality for real-world applications. Conversely, the controller proposed in [
18] utilizes a distributed observer at each follower robot to estimate the leader’s state. The trajectories generated by this method are depicted in
Figure 23, demonstrating successful achievement of the desired triangular formation. Nonetheless, a comparison of the total error plots in
Figure 23 and
Figure 24 reveals that the controller from [
18] experiences considerably higher errors during the initial phase of operation. This reduction in performance is primarily attributed to the initial inaccuracies in leader state estimation, which adversely affect the controller’s early behavior.
The proposed control strategy integrates coordination errors among follower robots directly into its framework, leading to improved accuracy in formation tracking. In contrast to earlier centralized methods, this approach enables formation control of NWMRs within a distributed architecture. This represents a significant progression, as distributed systems inherently provide better scalability, increased resilience to faults, and lower computational and communication loads on the leader. Additionally, simulation outcomes demonstrate that the bioinspired control model successfully mitigates the velocity discontinuities typically observed in backstepping-based controllers, thereby reinforcing the effectiveness of the proposed method.
4.5. Response to Sudden Disturbances
To validate the robustness of the proposed controller under realistic and challenging conditions, we conducted a set of dedicated simulations introducing sudden external disturbances to the system, as shown in
Figure 25. These disturbances were designed to mimic unexpected real-world events such as uneven terrain effects, wind gusts, or temporary actuator faults. In the simulation setup, disturbances were introduced in two ways:
- (a)
Impulse Disturbances on Leader: A sudden force was applied to the leader robot at s, deviating momentarily from its planned trajectory. The controller successfully compensated for the disturbance within a few seconds, realigning the leader to its intended path. The follower robots, relying on the distributed estimator, adapted to the leader’s corrective motion without compromising the triangular formation.
- (b)
Random Lateral Perturbations on Followers: Each follower was subjected to random lateral position offsets (magnitude between 0.5 and 1.0 units) at different time instances (e.g., t = 20 s, 25 s). These perturbations disrupted the formation briefly. However, the PD-based control law, supported by the estimator, promptly corrected the deviations, and the swarm regained the desired formation with minimal tracking error growth.
Figures visualize the following:
The deviation and recovery trajectories of the leader and followers.
The corresponding tracking errors during and after disturbances.
The estimator response to sudden state changes.
These simulations demonstrate that the proposed control strategy exhibits strong disturbance rejection capability, effectively maintaining tracking performance and formation shape under sudden, unpredictable changes in the robot states. This reinforces the practical viability of our approach in dynamic, unstructured environments.
4.6. Comparison with Distributed and Centralized Strategies
To further strengthen the evaluation of the proposed distributed estimator–controller, we conducted a comparative analysis against both centralized and conventional distributed control strategies, as shown in
Figure 26. In centralized approaches, a global planner computes and broadcasts commands to all robots, typically offering high coordination accuracy. However, such systems are highly sensitive to communication failures and suffer from scalability limitations. In contrast, our distributed strategy, which leverages local information and estimations of the leader’s trajectory, shows superior robustness in the presence of communication uncertainties and delays.
In our simulation, the proposed method achieved a formation tracking RMSE of 2.6425, 3.0132, and 4.2132 for followers , and , respectively. These values are comparable to or better than those observed with centralized control under ideal conditions, but show significantly more resilience when subject to packet loss or network delays. When benchmarked against a basic distributed consensus-based controller without estimation, the proposed method demonstrated faster convergence and smaller steady-state errors, especially when the leader executed dynamic trajectories.
Moreover, the proposed method maintained formation integrity even under sudden disturbances and topology changes, scenarios where the performance of centralized and conventional distributed methods degraded considerably. This indicates that our estimator-based approach offers a favorable trade-off between coordination accuracy and system robustness, particularly in dynamic or partially observable environments. Such performance highlights the method’s suitability for real-world applications requiring autonomy and fault tolerance.
4.7. Limitations of the Proposed Control Scheme
The proposed distributed leader–follower control strategy demonstrates effective trajectory tracking and formation maintenance for small-scale groups of NWMRs; several limitations remain to be addressed for broader applicability. First, scalability to large-scale robot swarms poses a significant challenge. As the number of robots increases, communication overhead and network complexity grow, potentially leading to increased delays and information loss. The current method assumes reliable communication within the modeled topology, and its performance under high network congestion or packet drops requires further investigation. Second, the proposed control framework does not explicitly account for dynamic obstacle avoidance. In practical environments where obstacles may appear unpredictably, integrating real-time sensing and reactive planning mechanisms is essential to ensure safe navigation while preserving formation and tracking objectives. Third, computational complexity and real-time implementation constraints may limit deployment on resource-constrained platforms. Although the distributed nature of the control reduces centralized computation, the sliding mode control law and state estimators require careful tuning and sufficient processing capability to maintain stability and responsiveness. Addressing these limitations through advanced communication protocols, adaptive obstacle avoidance strategies, and computationally efficient algorithms represents a promising direction for future work to enhance the robustness and applicability of the control scheme in complex, real-world multi-robot scenarios.


 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}