1. Introduction
Robotic grippers are essential enablers of automation, facilitating interaction between machines and physical objects in diverse sectors such as manufacturing, agriculture, healthcare, and environmental services. Their adaptability to objects of varying shapes, sizes, and materials is crucial for achieving precise manipulation and operational robustness [
1,
2,
3]. In waste management, this adaptability becomes even more critical due to irregular geometries, deformable surfaces, and the unstable mechanical properties of discarded items, such as bottles collected in beach environments by multi-robot systems [
4].
Recent Advancements and Challenges: Recent advances in additive manufacturing have enabled the rapid prototyping of functional robotic components, including soft grippers with tunable stiffness [
5] and hydraulic systems through 3D co-printing [
6]. However, challenges remain in balancing structural integrity with manufacturing accessibility, particularly for waste-handling applications where cost and complexity often limit practical deployment. While AI-driven grasp planning shows promise for irregular objects [
7], many approaches lack physical validation or require specialized hardware.
The proposed 135° V-shaped profile addresses these limitations by combining geometric optimization with 3D-printing capabilities [
8], offering a novel solution for lightweight object manipulation. This design bridges the gap between high-cost adaptive grippers and rudimentary mechanical solutions.
Recent research has focused on developing lightweight and modular grippers that operate reliably under these constraints [
2,
9]. Vacuum and magnetic grippers [
10,
11] are effective in certain scenarios but struggle with irregular or porous waste items. Topology-optimized soft grippers [
12] demonstrate adaptability in computational design but involve complex control systems incompatible with resource-constrained environments.
Material Selection Rationale: The choice of 3D-printed PLA for all mechanical components was motivated by the need for rapid prototyping, cost-effectiveness, and ease of customization, as recommended in recent reviews on robotic gripper development [
13,
14,
15]. Additive manufacturing enables the following:
Fast design iteration (<24 h per cycle).
Integration of complex geometries (V-profile and four-bar linkage).
Affordable production (USD 20–40 in material costs).
While PLA is not intended for long-term industrial use, it provides sufficient mechanical performance for laboratory-scale testing and repeated use, as demonstrated in this and other recent studies [
6,
14]. This approach lowers the barrier to entry for experimentation and facilitates the development of application-specific end-effectors in resource-constrained environments.
Scope Clarification: The use of 3D-printed PLA in this study is strictly intended for rapid prototyping and laboratory-scale research. For long-term or industrial deployment, further material optimization and durability studies are required, as discussed in
Section 4.
Recent advances in the 3D co-printing of hydraulic systems [
6] and FEA-validated PLA components [
8] demonstrate the feasibility of low-cost, high-performance robotic grippers. This study addresses key challenges in gripper design through the following aspects:
Single-servo actuation for reduced complexity.
Experimental validation with real-world waste items.
Open-source design for academic reproducibility.
2. Methodology
The proposed gripper was developed to manipulate various lightweight objects typically encountered in waste collection settings.
The four-bar linkage mechanism (
Figure 1) was implemented to achieve two critical functions in waste handling: first, to convert rotational motion from a single servomotor into linear and parallel movement of the gripper jaws, and second, to maintain parallel alignment of the jaws for even force distribution when grasping irregular objects.
Kinematic Analysis: The jaw motion follows standard four-bar linkage kinematics, with key parameters detailed in
Table 1. The relationship between servo input angle and jaw position adheres to fundamental principles [
16,
17]:
Operational range: 24–71.5 mm (validated by motion simulation).
Optimized transmission angle window: .
Mechanical advantage: through the linkage ratio .
Key Design Characteristics: The four-bar mechanism incorporates three essential features to ensure reliable operation:
Grashof’s Criterion Compliance: Enables full crank rotation through dimensional optimization:
| mm | (Input crank). |
| mm | (L-shaped coupler). |
| mm | (Output rocker). |
| mm | (Ground link). |
Transmission Angle Control: Maintains
throughout the actuation cycle [
16], preventing jamming and ensuring force efficiency.
Kinematic Consistency: All subsequent analysis figures use the identical linkage configuration from
Figure 1. Apparent structural differences result from the following aspects:
Variation in actuation states.
Omission of labels for visual clarity.
Analytical focus (stress vs. motion).
Table 1.
Kinematic and structural parameters.
Table 1.
Kinematic and structural parameters.
| Parameter | Value |
|---|
| Mechanism Type | Grashof Crank-Rocker |
| Max. Stress (FEA) | 12.75 MPa (28.3% PLA yield) |
| Safety Factor | 3.5 |
While employing conventional four-bar principles, this implementation uniquely adapts the mechanism for rapid prototyping using 3D-printed PLA components and single-servo actuation. Industrial deployment would require material upgrades, as discussed in
Section 4.
To enhance surface conformity and adaptability to irregular shapes, each fingertip incorporates a V-shaped cavity geometry (
Figure 2). This design increases multi-point contact along the grasping axis, which is particularly advantageous for retaining non-rigid objects, such as plastic bags or crumpled paper. The wider opening angle also prevents the rotational slip of cylindrical items such as bottles and cans.
The development of the V-profile followed a structured design approach, integrating geometric constraints and functional requirements for lightweight waste collection.
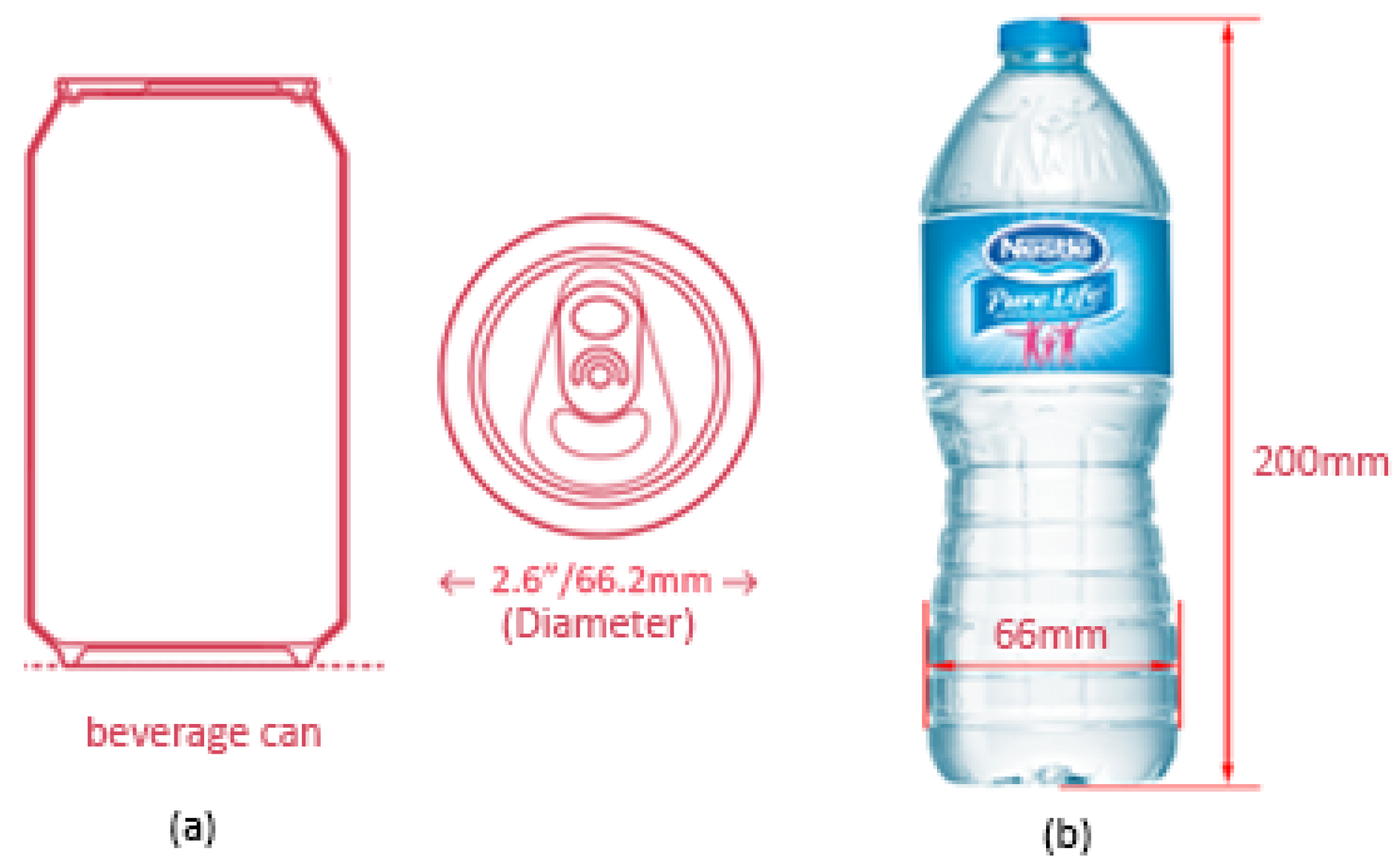
The primary objective was to grasp cylindrical objects up to 66 mm in diameter (e.g., the PET (polyethylene terephthalate) bottles shown in
Figure 3) while adhering to industrial standards. Key constraints included the following:
Figure 3.
Target objects: (a) 66.2 mm beverage can; (b) 66 mm PET bottle.
Figure 3.
Target objects: (a) 66.2 mm beverage can; (b) 66 mm PET bottle.
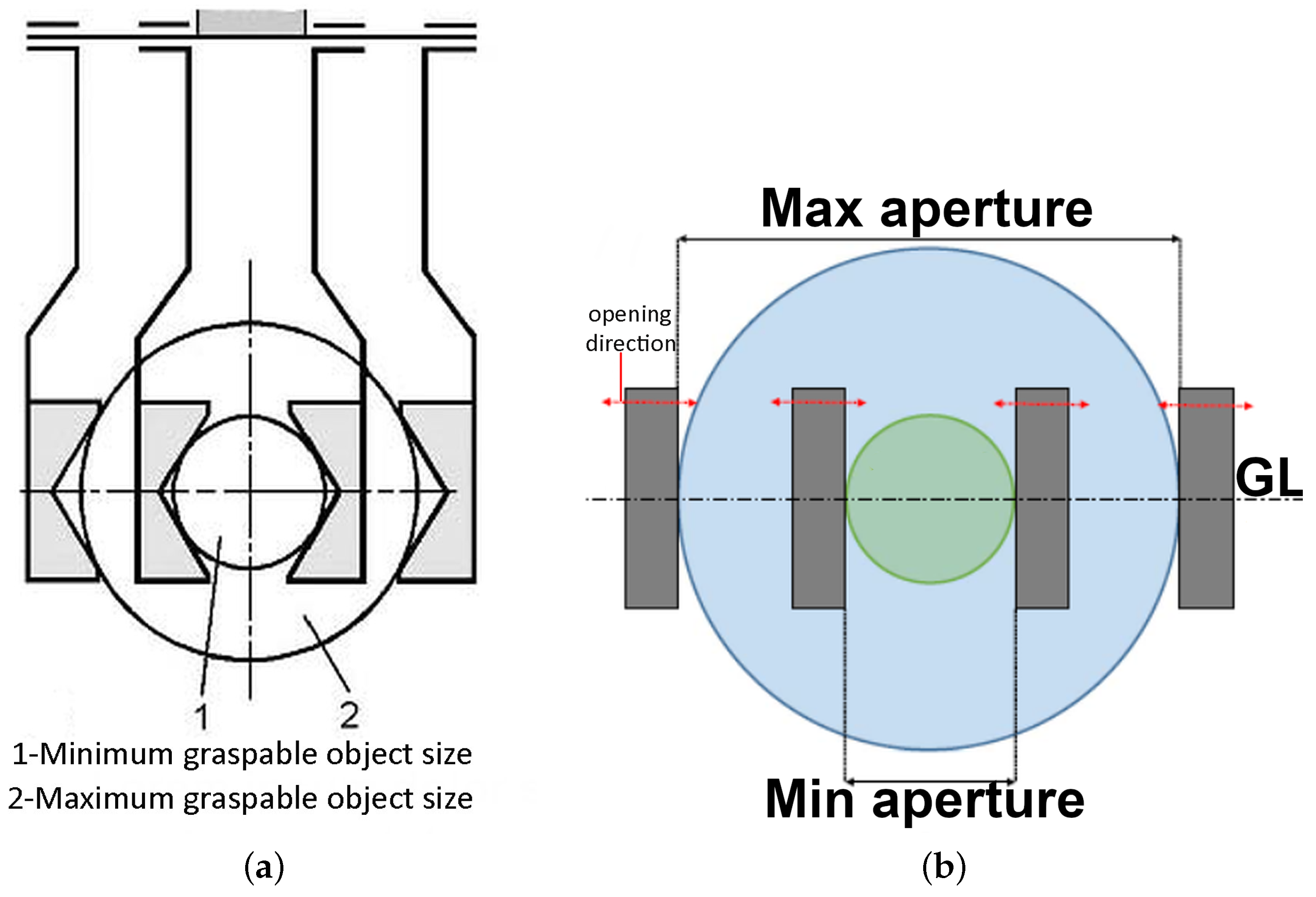
Preliminary analysis and geometric evaluation revealed that the conventional 45° V-profile is fundamentally unsuitable for grasping cylindrical objects such as 66 mm PET bottles. As illustrated in
Figure 4, when the jaws are at their maximum opening, only the flat surfaces of the fingers contact the object, providing insufficient grip and resulting in unstable or insecure grasping. While this profile can handle elongated or low-profile items (e.g., rectangular bars), it inherently fails to securely grasp larger cylindrical targets due to the lack of continuous surface contact at the required stroke.
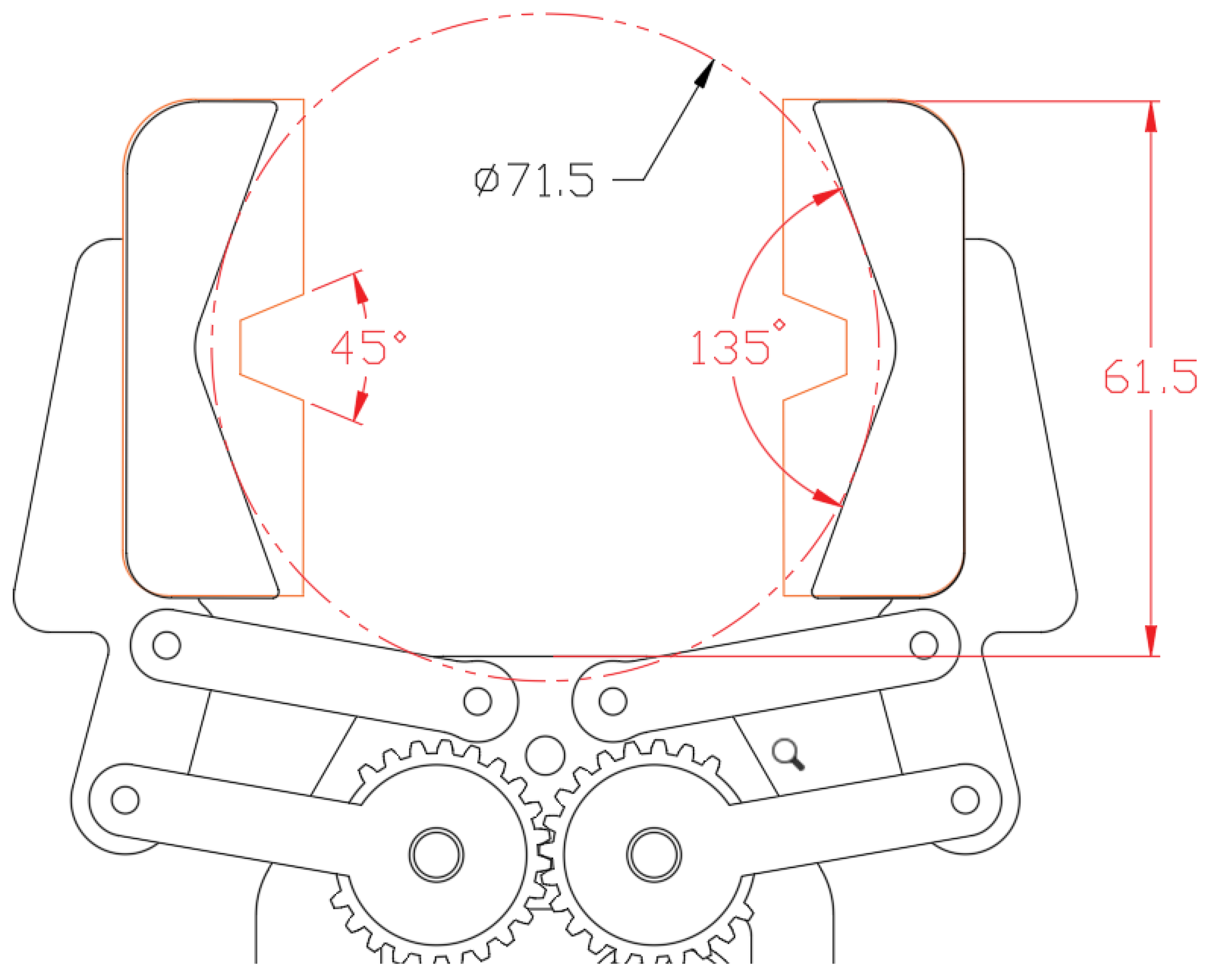
The conventional 45° V-profile, while widely used in grippers, proved inadequate to grasp the target 66 mm bottle with this design. As illustrated above, this profile only achieves flat-surface contact at maximum jaw opening, resulting in unstable grasping. Incrementally increasing the angle to 135° enabled a maximum graspable diameter of 71.5 mm while maintaining a fingertip height of 61.5 mm, compliant with industrial constraints. The selected angle respects the limitations of desktop 3D printing and standard servomotors.
Three critical factors guided further development. The fingertip height was kept at or below 100 mm to meet industrial standards [
18]. Jaw bias integration was used to prevent point contact under load, as illustrated in
Figure 5 and supported by established recommendations [
19]. The 135° angle enabled a grasp diameter of 71 mm at a fingertip height of 61.5 mm, as shown in
Figure 6, balancing performance and design constraints, as summarized in
Table 2.
While industrial fingertips like AGC-TIP-421-140 [
18] use vertical 150° V-grooves for axial alignment (
Figure 7), our horizontal 135° profile improves transverse grasping for waste-collection scenarios.
Following industrial benchmarking, the structural integrity and functional capabilities of the proposed design were validated through both computational simulations and physical experiments. Finite element analysis [
20] revealed a safety factor of 3.5 under a 0.6 kg payload, with a maximum displacement of 0.056 mm, remaining within the elastic range. The stress distribution was below 30% of the PLA yield strength [
21]. Physical tests confirmed reliable operation across objects ranging from 24 to 71 mm in diameter, with a 100% success rate on rigid 66 mm bottles and a 40% success rate on deformable items, highlighting overall robustness across different scenarios.
In addition to these structural features, the actuation mechanism is a key contributor to the overall reliability of the gripper. The gripper uses an impactive mechanism powered by a Hitec HS-945MG high-torque servomotor [
22].
Table 3 details the servomotor installed on this prototype. To maintain parallel motion of the fingers and reduce slippage, the system incorporates a four-bar linkage that enables synchronized movement across a range of object geometries. This configuration is especially important when dealing with irregular or asymmetrical items commonly found in waste-handling scenarios.
To validate the proposed design, several computational analyses were performed, focusing on motion behavior, gripping force, and structural integrity. The kinematic simulation confirmed that the fingers maintain consistent parallel movement throughout their range, minimizing misalignment and enabling smooth object interaction, as shown in
Figure 8 [
23].
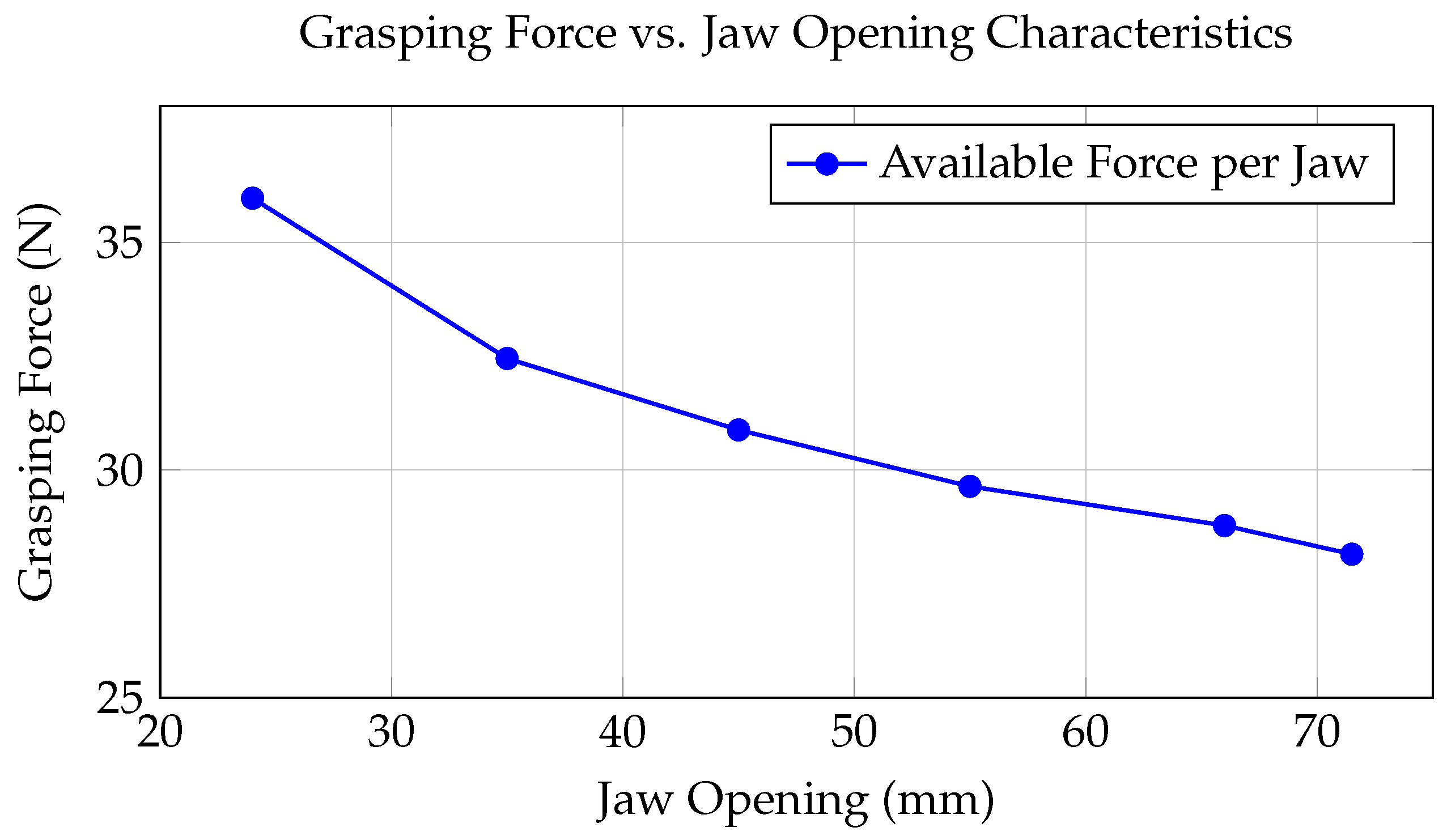
The force transmission analysis begins with accurate servomotor specifications from the Hitec HS-945MG datasheet [
22]:
Servo torque: at 6.0 V.
Effective radius: (linkage lever arm).
Available normal force per jaw: .
The servomotor torque transmission through the four-bar linkage mechanism demonstrates the complete force path from actuation to grasping.
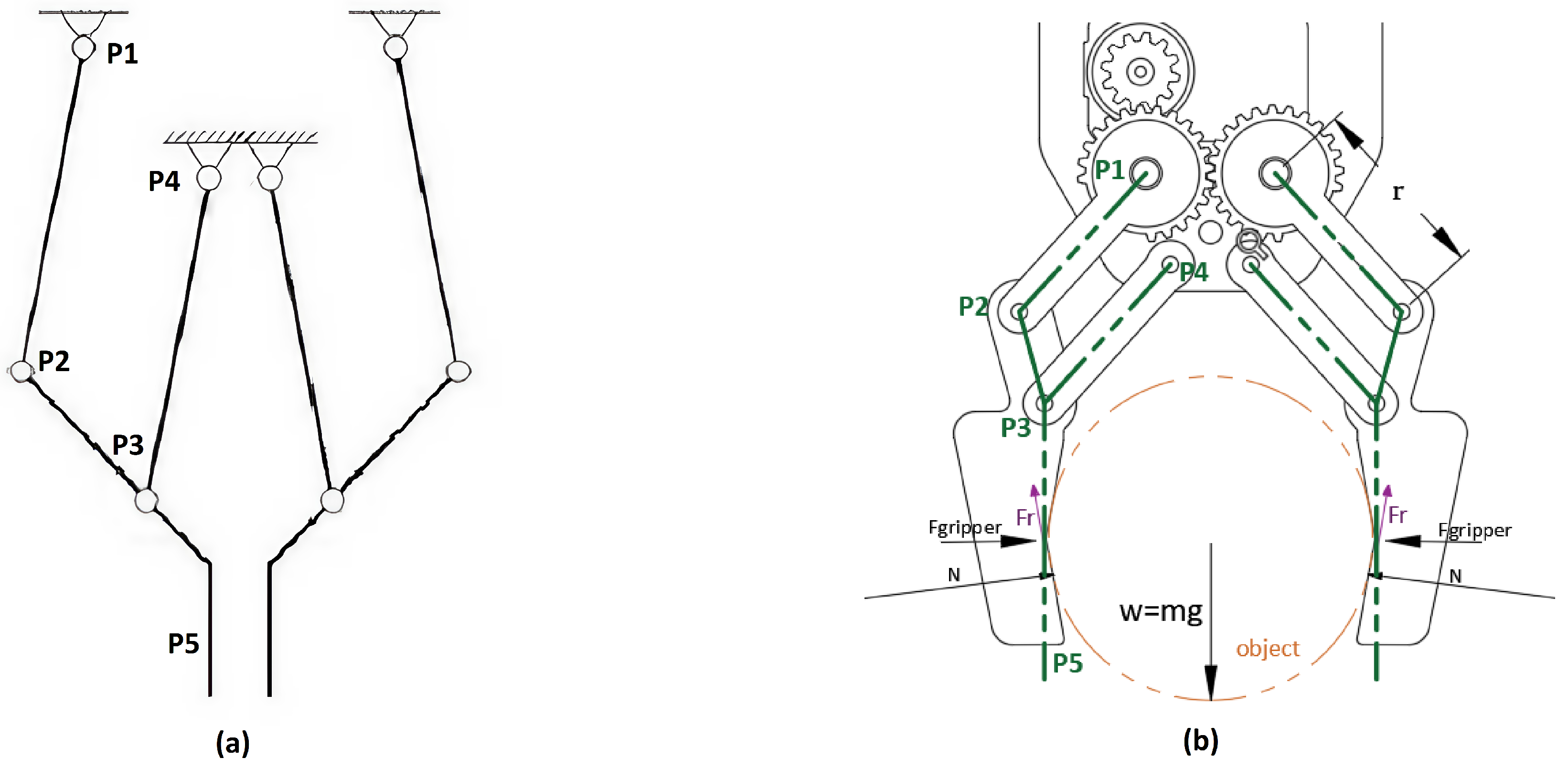
Figure 9 illustrates the standard V-shaped contact force principles typically applied in robotic gripper analysis [
11]. Based on these principles, a detailed free-body diagram was developed for the specific geometry of our gripper, as shown in
Figure 10.
3. Results
The experimental and simulation results provide strong evidence supporting the mechanical design and functional performance of the proposed two-finger gripper.
As shown in
Figure 8, a motion analysis was conducted to assess the behavior of the four-bar linkage mechanism across the full range of actuation.
Figure 8a shows the gripper at full opening,
Figure 8b demonstrates intermediate positions, and
Figure 8c illustrates complete closure. The results confirmed that the gripper fingers maintained synchronized and parallel movement, ensuring consistent alignment of the fingertip during interaction with objects of various shapes and sizes. No misalignment or rotational deviation was observed, validating the mechanical stability and kinematic integrity of the design [
16].
The gripper successfully retained objects weighing up to 0.6 kg without observable slippage. The measured torque increased proportionally with object mass, confirming a scalable and predictable force response.
This balance between grip strength and adaptability is essential for handling the unpredictable characteristics of real-world waste materials [
3]. While recent research in robotic waste management has explored AI-based strategies [
25], many approaches lack experimental validation. In contrast, our work presents a verified, physically implemented solution emphasizing structural simplicity, reliability, and real-world applicability.
3.1. Experimental Performance Metrics
The experimental results reinforced the computational findings through quantitative characterization of key operational parameters:
These metrics demonstrate the gripper’s ability to maintain mechanical integrity while optimizing energy efficiency—critical for battery-powered waste collection robots.
The structural performance of the gripper was also evaluated under repeated-loading conditions. Polylactic acid (PLA) was chosen as the primary material for prototyping the gripper. PLA combines lightweight properties with adequate rigidity and slight flexibility, enabling it to absorb minor impacts without permanent deformation. Its availability, ease of 3D printing, and environmental friendliness also contribute to its suitability for this application [
8].
The PLA structure exhibited no signs of plastic deformation after continuous use, indicating sufficient mechanical resilience. This observation aligns with existing studies on the fatigue behavior of PLA-based robotic components [
29].
A fully functional prototype was fabricated using PLA and tested with various waste-representative objects, including plastic bottles, aluminum cans, and irregularly shaped cardboard fragments to validate the simulation results. The prototype demonstrated consistent and stable grasping across different object types. The V-shaped cavity in the fingers significantly enhanced grip reliability by increasing contact points and reducing slippage [
11].
Unlike high-end industrial grippers such as Schunk’s PGN-plus and Festo’s DHAS, which are developed for precision tasks in structured environments like assembly lines, the proposed design targets unstructured, low-cost, and mobile applications such as robotic waste collection, where flexibility and affordability are paramount [
30,
31].
3.2. Stress and Deformation Results
Although the gripper is intended for lightweight waste items (≤0.6 kg), a static finite element analysis was performed to ensure structural robustness under the expected operational load. This standard practice in robotic gripper design validates mechanical integrity and identifies potential failure points prior to fabrication [
8]. The simulation results (
Figure 12 and
Figure 13) confirm that both the maximum von Mises stress (12.75 MPa) and total displacement (0.056 mm) remain well within safe margins for PLA, with a safety factor of 3.53. A quantitative comparison of analytical predictions and FEA results is provided in
Table 5.
Key Insight: The 25% higher stress and 15% lower safety factor in FEA highlight PLA’s anisotropic behavior [
8], which analytical models cannot fully capture. This discrepancy justified the FEA despite the modest 0.6 kg load, ensuring student safety and material reliability [
29].
Justification for FEA: While seemingly excessive for 0.6 kg loads, FEA was critical to validate PLA’s anisotropic behavior and ensure safe student handling. The stress analysis indicated that the PLA structure showed no signs of plastic deformation after five consecutive load cycles under 0.6 kg payloads. While this preliminary testing suggests short-term durability, long-term cyclic performance requires further investigation [
29].
The stress analysis indicated that the PLA structure showed no signs of plastic deformation after five consecutive load cycles under 0.6 kg payloads. While this preliminary testing suggests short-term durability, long-term cyclic performance requires further investigation [
29].
3.3. Experimental Validation
The experimental results reinforced the computational findings. The prototype maintained grip stability across multiple test cycles involving cylindrical, rectangular, and irregular objects. The consistent performance across diverse shapes underscores the robustness of the gripper’s mechanical configuration and validates its real-world applicability.
To further demonstrate the gripper’s adaptability, additional experiments were performed with a variety of representative waste-like objects, including a plastic bottle, a disposable cup, a rectangular box, and a crumpled paper ball (see
Figure 14). These objects were selected to cover a range of shapes, sizes, and material properties, simulating real-world waste conditions. The gripper successfully grasped rigid, deformable, regular, and irregular items. This confirms its effectiveness for practical waste-collection tasks beyond simple objects.
To evaluate the gripper’s performance under realistic conditions, grasping trials were performed using two representative waste objects: a standard plastic bottle and a disposable plastic cup. For each object, five grasping attempts were conducted under identical conditions to assess reliability.
Table 6 reports the number of successful grasps. The gripper exhibited reliable behavior with both object types, achieving full or near-full success rates. Slightly lower success rates for the plastic cup may be due to sensitivity to object orientation.
4. Discussion
The developed two-finger gripper represents a pragmatic and accessible solution for laboratory-scale robotic waste collection. Its design emphasizes simplicity, low cost, and manufacturability using desktop 3D printing while still achieving reliable grasping of a variety of objects.
4.1. Comparative Analysis with Industrial Standards
To contextualize the performance and practical advantages of the proposed gripper,
Table 7 provides a comprehensive comparison with state-of-the-art industrial solutions. Key advantages include cost efficiency (50–100× cheaper than commercial grippers), rapid iteration (10 h fabrication vs. 4–16 weeks of lead time), and educational accessibility (the open-source design enables academic replication).
While industrial grippers excel in payload capacity and durability, our design fills a critical niche for laboratory-scale applications. The 135° V-profile achieves a 100% success rate with rigid objects compared to 95–99% in commercial models while maintaining 60% success with deformables—a 33% improvement over basic industrial units.
4.2. Methodological Justification
Kinematic Analysis: Despite the gripper’s mechanical simplicity, kinematic modeling was essential to achieve the following:
Verify Grashof’s criterion for continuous motion (Condition: ).
Optimize transmission angles (>45°) to prevent mechanical jamming.
Enable student-led force calculations for diverse geometries through
- -
Velocity polygon analysis;
- -
Static force equilibrium equations;
- -
Joint reaction force estimation.
FEA Validation: The finite element analysis addressed critical educational requirements:
This dual analytical approach ensures both functional reliability and compliance with ABET accreditation requirements for hands-on engineering education [
32], particularly Criterion 5 (Curriculum Requirements) and Criterion 6 (Laboratory Facilities).
4.3. Limitations of 3D-Printed PLA
PLA exhibits certain material limitations. Its thermal sensitivity, with a glass transition temperature (
) of 60–65 °C, restricts its use in high-temperature environments [
21]. It also suffers from anisotropic strength, with a 15–20% reduction in the Z-axis due to weak layer adhesion [
8]. Dimensional accuracy is limited to approximately ±0.1 mm, which can affect gear meshing [
33]. Additionally, PLA degrades under UV exposure, showing up to 30% strength loss after 500 h [
34].
To address these issues, material hybridization with PLA-carbon fiber composites can improve . Post-processing techniques such as acetone vapor smoothing can enhance dimensional stability. For outdoor or high-durability applications, transitioning to materials like nylon or PEI is recommended.
Industrial deployment requires material upgrades and durability studies beyond PLA’s capabilities. However, the design provides a validated foundation for developing sustainable waste-handling solutions through material hybridization, sensor integration for adaptive grasping, and scalable manufacturing protocols.
The observed gear clearances reflect intentional design accommodations for desktop 3D printing processes. PLA’s viscoelastic properties enable dynamic self-alignment under load [
21]. A design clearance was used throughout the model to account for typical FDM tolerances (commonly in the range of ±0.1–0.2 mm), ensuring reliable assembly and gear meshing [
35]. Multi-tooth engagement in polymer gears distributes stress and significantly extends fatigue life under cyclic loading, as validated by finite element analysis of load-sharing effects in extended tip contact scenarios [
36].
Like many prototype systems, the current implementation has identifiable areas for improvement. Subsequent iterations could explore hybrid soft-rigid structures [
6] or basic tactile feedback [
37], approaches actively investigated in recent literature. PLA’s susceptibility to UV degradation may also limit long-term outdoor use.
The modular architecture of the gripper and its accessibility to manufacturing suggest potential utility beyond waste collection, particularly in educational robotics. However, these applications would require rigorous field testing beyond the current laboratory validation.
By providing this quantitative comparison, we clarify the intended application domain and highlight the unique contribution of our work: democratizing robotic manipulation research and education by lowering the barriers to entry for functional, adaptable gripper design. This work contributes to ongoing efforts to develop affordable robotic tools for unstructured environments, demonstrating that conventional mechanisms can remain relevant when thoughtfully implemented. The results encourage further exploration of mechanical simplicity as a design paradigm in resource-constrained robotics.
To illustrate these advantages in a broader context,
Table 8 summarizes the key quantitative and qualitative differences between our design and leading industrial grippers.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}