
Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review


 , , ,
, , , 
Abstract
1. Introduction
2. Design Configurations for Robotic Arm Grippers
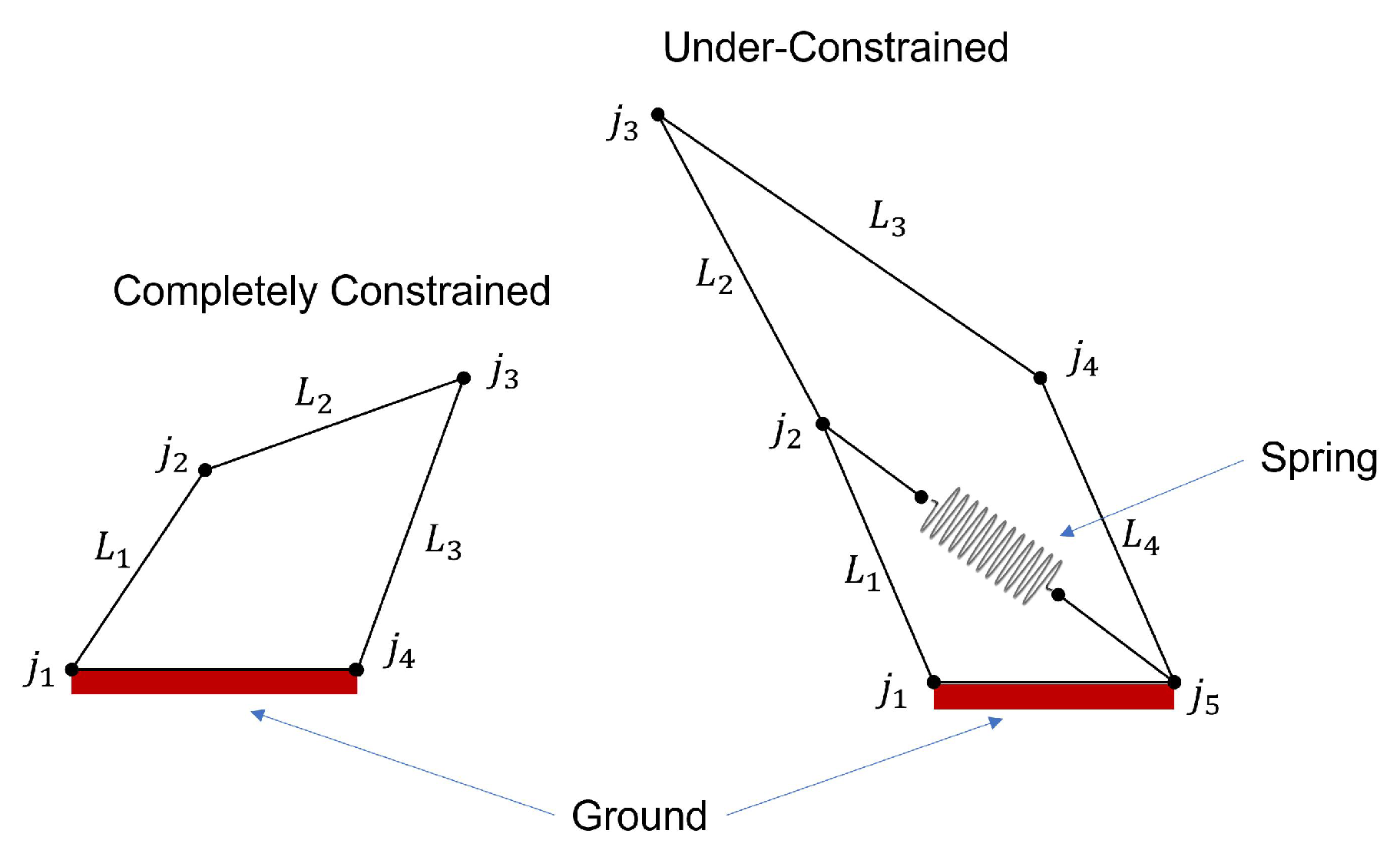
2.1. Completely Constrained Gripper Mechanism
2.1.1. Compliant Mechanism
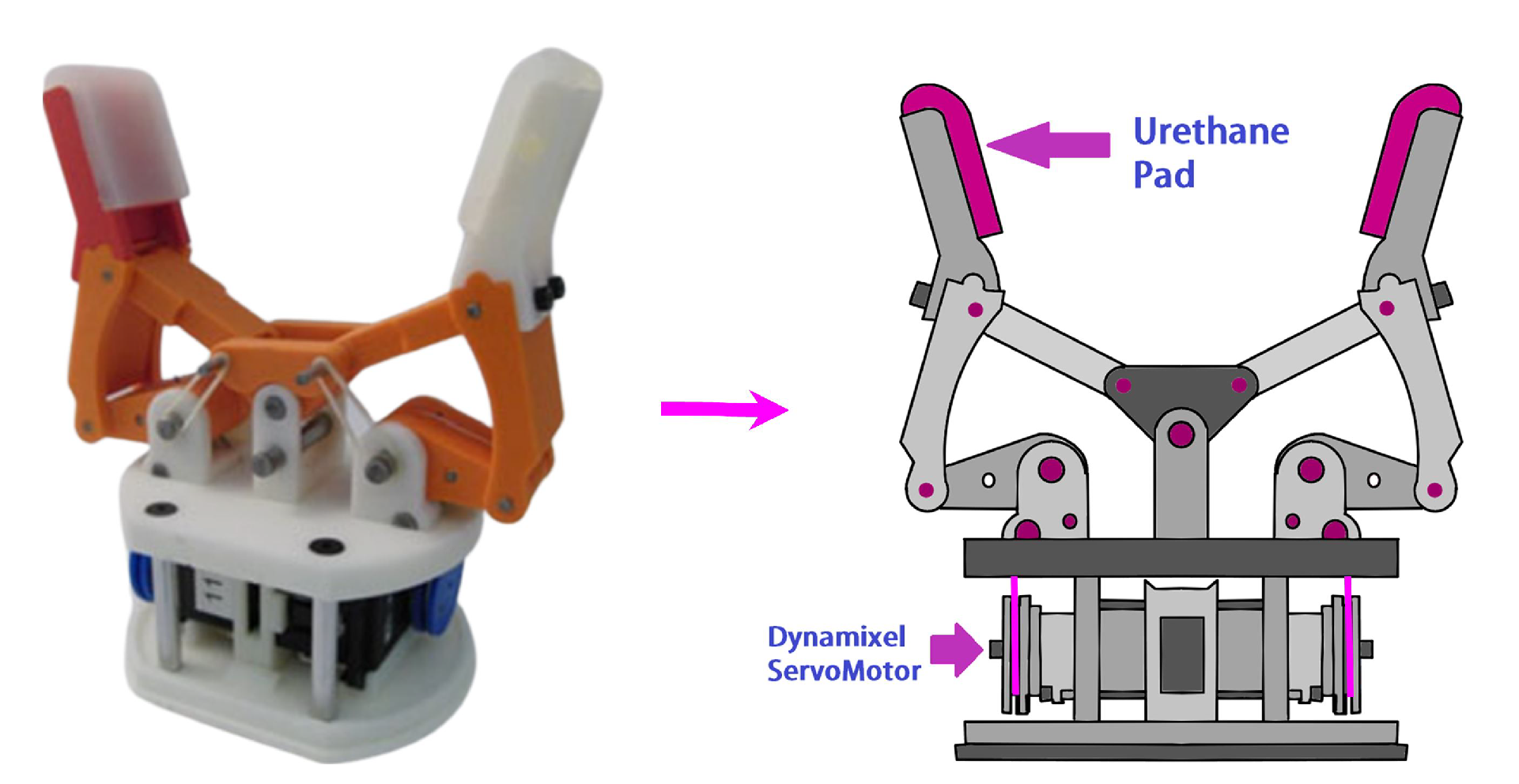
2.1.2. Rigid Links
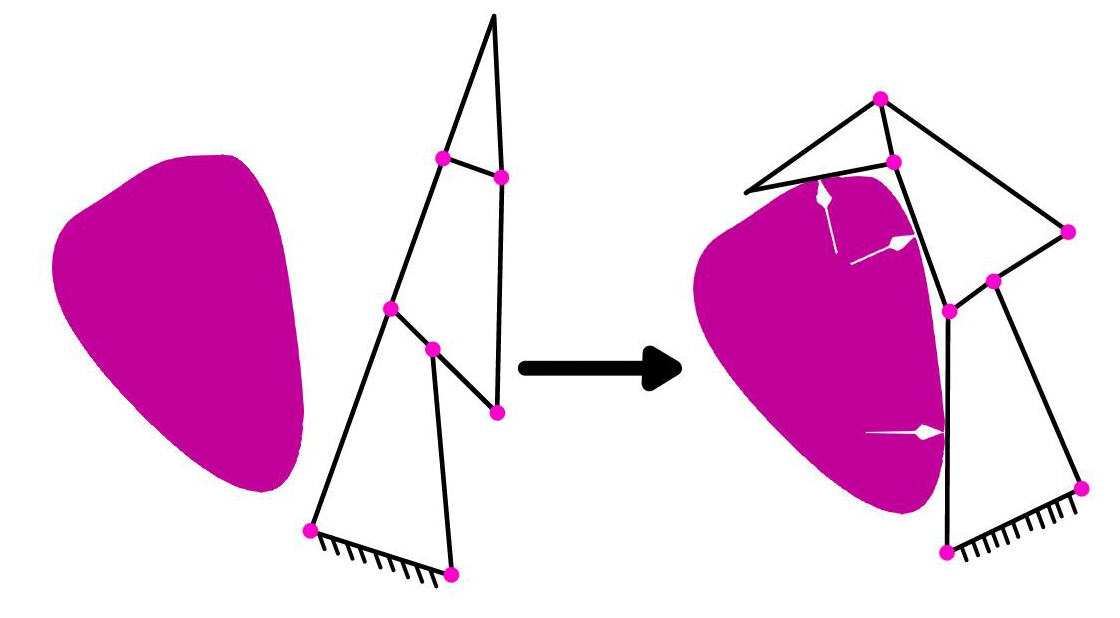
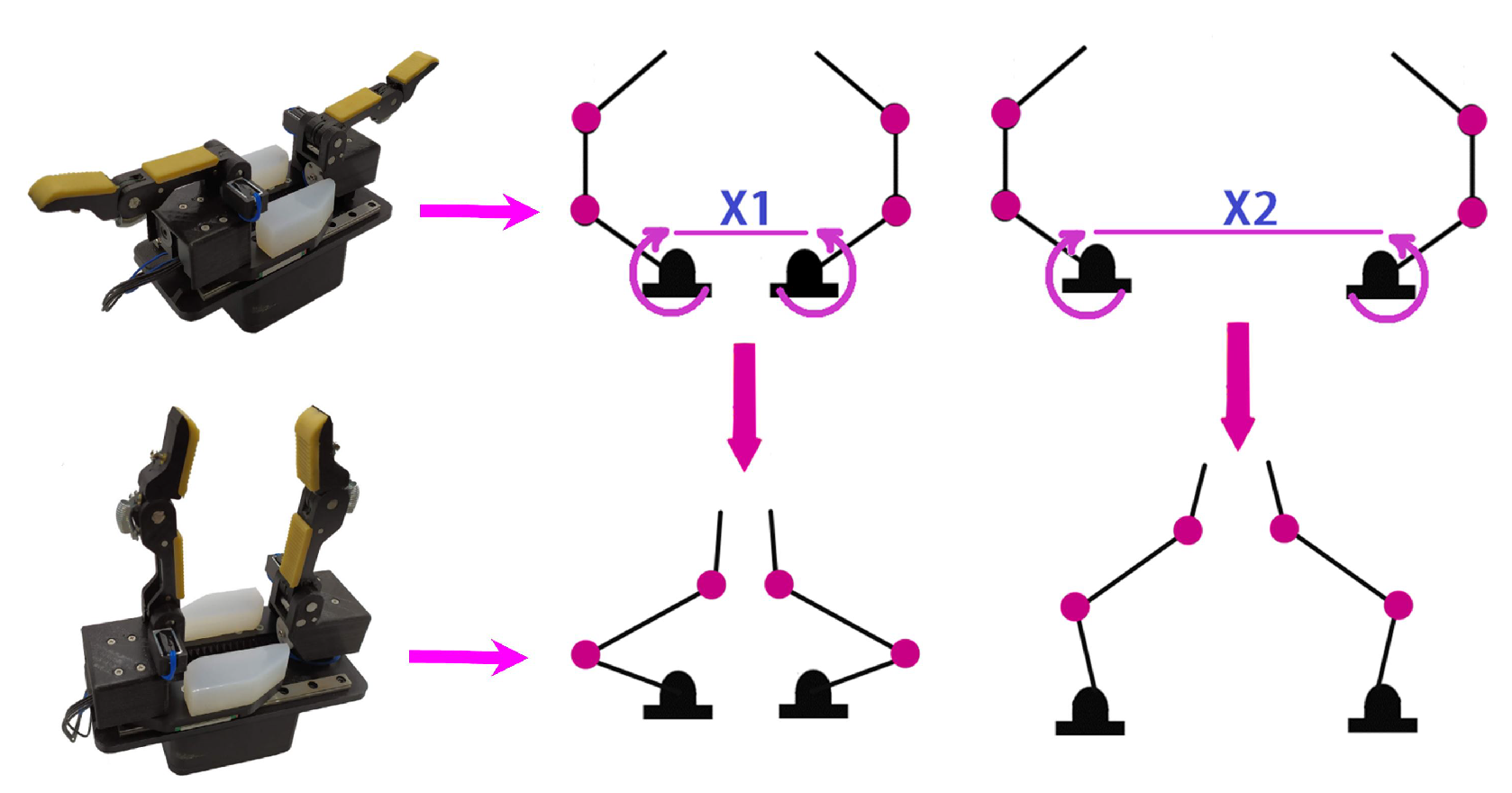
2.2. Underconstrained Mechanism
2.3. Compliant Mechanism
Rigid Links
2.4. Deformable Grippers
2.4.1. Single Mass Gripper
2.4.2. Single Mass Finger
2.4.3. Materials of the Deformable Grippers
3. Principal Findings
4. Conclusions
- The sensing of the forces generated by the grasping is not accurate. Thus, to avoid breaking fragile objects, engineers use deformable grippers.
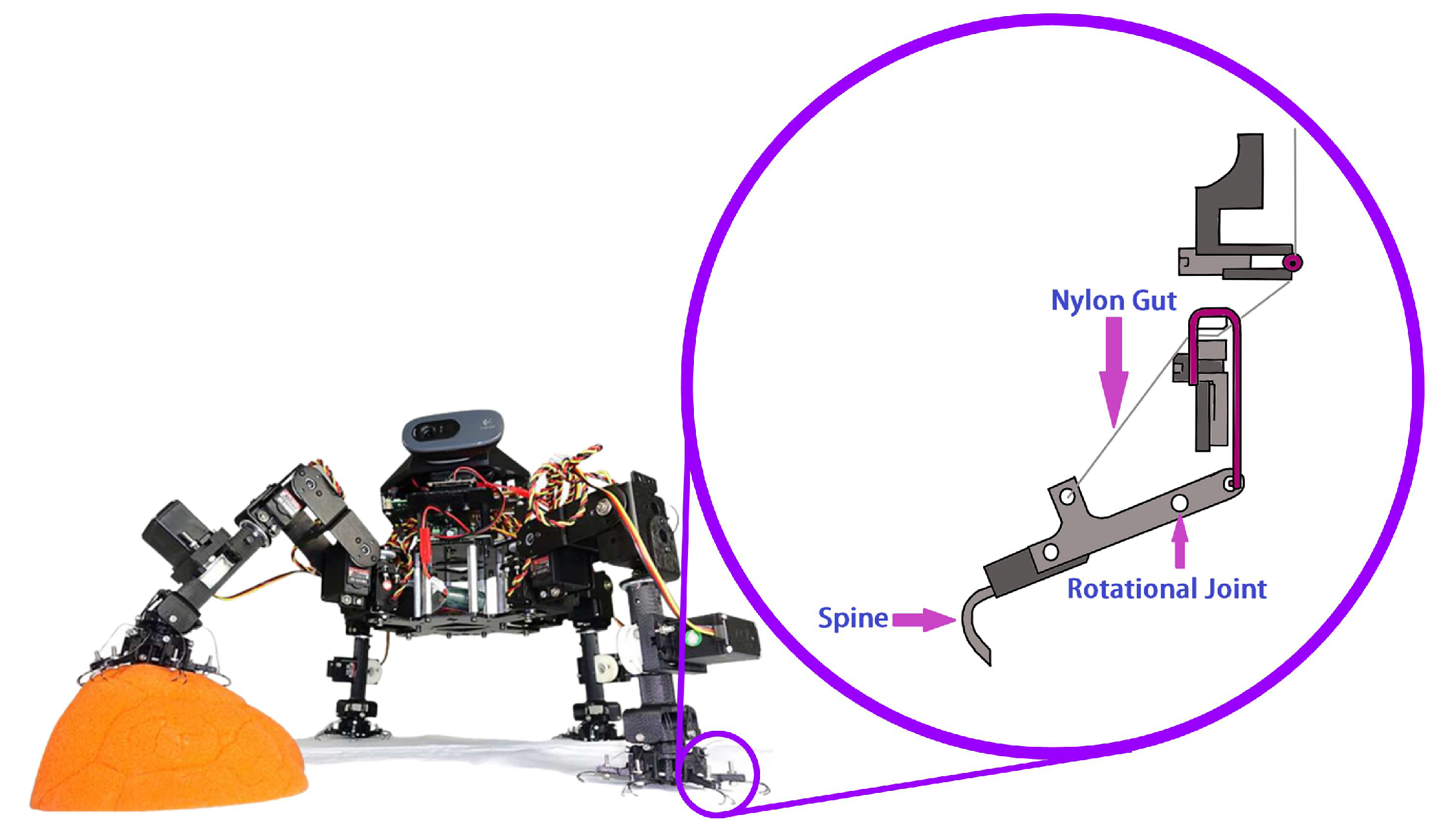
- Another issue is the glide of objects, which creates issues in the control strategy. Thus, a solution for this subject is variable friction in the gripper found in gecko-inspired grippers.
- The issue of the sensing forces is handled by completely constrained grippers which can exert greater forces with precision, especially in applications where heavy objects must be moved. However, it cannot be attached to different shapes with ease.
- Another option for deformable grippers is passive-compliant mechanisms that add an extra DOF to increase the manipulability. Passive-compliant mechanisms have the advantage of exerting a moderate amount of output force, adequate for handling objects with a moderate weight, especially if they are built using rigid links.
- Passive compliant mechanisms offers a balance between flexibility and strength. Possessing rigid joints, it can support heavy weights while adapting to most objects’ shapes. As a result, it is ideal for applications where the environment is uncontrolled or unpredictable
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOF | Degree of Freedom |
| TPE | Thermoplastic Elastomer |
| FRM | Flexible Redundant Robot Manipulators |
| ABS | Acrylonitrile Butadiene Styrene |
| PLA | Polylactic Acid |
| TPU | Thermoplastic polyurethane |
| BLDC | Brushless DC Motor |
| PID | Proportional-Integral-Derivative feedback control |
| NTM | Numerical Network Model |
| RTV | soft, adherent, clear silicone elastomer gel |
| 3J1 | Nickel-based high elastic alloy |
| 3J21 | Cobalt based high elastic alloy |
| TC4 | Titanium Alloy |
Appendix A. Journal Selection

References
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal Design of a Motor-Driven Three-Finger Soft Robotic Gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot. Comput.-Integr. Manuf. 2018, 49, 88–97. [Google Scholar] [CrossRef]
- Choi, B.; Choi, H.R.; Kang, S. Development of tactile sensor for detecting contact force and slip. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2638–2643. [Google Scholar] [CrossRef]
- Cannata, G.; Maggiali, M. An embedded tactile and force sensor for robotic manipulation and grasping. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 80–85. [Google Scholar] [CrossRef]
- Nagaoka, K.; Minote, H.; Maruya, K.; Shirai, Y.; Yoshida, K.; Hakamada, T.; Sawada, H.; Kubota, T. Passive Spine Gripper for Free-Climbing Robot in Extreme Terrain. IEEE Robot. Autom. Lett. 2018, 3, 1765–1770. [Google Scholar] [CrossRef]
- Chen, F.; Xu, W.; Zhang, H.; Wang, Y.; Cao, J.; Wang, M.Y.; Ren, H.; Zhu, J.; Zhang, Y.F. Topology Optimized Design, Fabrication, and Characterization of a Soft Cable-Driven Gripper. IEEE Robot. Autom. Lett. 2018, 3, 2463–2470. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Li, Y. Soft Robotic Grippers Based on Particle Transmission. IEEE/ASME Trans. Mechatron. 2019, 24, 969–978. [Google Scholar] [CrossRef]
- Wang, Z.; Torigoe, Y.; Hirai, S. A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Backus, S.B.; Dollar, A.M. An Adaptive Three-Fingered Prismatic Gripper With Passive Rotational Joints. IEEE Robot. Autom. Lett. 2016, 1, 668–675. [Google Scholar] [CrossRef]
- Yoon, D.; Choi, Y. Analysis of Fingertip Force Vector for Pinch-Lifting Gripper With Robust Adaptation to Environments. IEEE Trans. Robot. 2021, 37, 1127–1143. [Google Scholar] [CrossRef]
- Zhakypov, Z.; Heremans, F.; Billard, A.; Paik, J. An Origami-Inspired Reconfigurable Suction Gripper for Picking Objects With Variable Shape and Size. IEEE Robot. Autom. Lett. 2018, 3, 2894–2901. [Google Scholar] [CrossRef]
- Rojas, N.; Ma, R.R.; Dollar, A.M. The GR2 Gripper: An Underactuated Hand for Open-Loop In-Hand Planar Manipulation. IEEE Trans. Robot. 2016, 32, 763–770. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Rojas, N.; Lepora, N.F. Model-Free Precise in-Hand Manipulation with a 3D-Printed Tactile Gripper. IEEE Robot. Autom. Lett. 2017, 2, 2056–2063. [Google Scholar] [CrossRef]
- Hashizume, J.; Huh, T.M.; Suresh, S.A.; Cutkosky, M.R. Capacitive Sensing for a Gripper With Gecko-Inspired Adhesive Film. IEEE Robot. Autom. Lett. 2019, 4, 677–683. [Google Scholar] [CrossRef]
- Elangovan, N.; Gerez, L.; Gao, G.; Liarokapis, M. Improving Robotic Manipulation Without Sacrificing Grasping Efficiency: A Multi-Modal, Adaptive Gripper With Reconfigurable Finger Bases. IEEE Access 2021, 9, 83298–83308. [Google Scholar] [CrossRef]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef]
- Makiyama, Y.; Wang, Z.; Hirai, S. A Pneumatic Needle Gripper for Handling Shredded Food Products. In Proceedings of the 2020 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Hokkaido, Japan, 28–29 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 183–187. [Google Scholar]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef]
- Wang, J.; Gao, D.; Lee, P.S. Recent Progress in Artificial Muscles for Interactive Soft Robotics. Adv. Mater. 2021, 33, 2003088. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef]
- Bicchi, A.; Kumar, V. Robotic grasping and contact: A review. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 1, pp. 348–353. [Google Scholar]
- Samadikhoshkho, Z.; Zareinia, K.; Janabi-Sharifi, F. A brief review on robotic grippers classifications. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Mukhtar, M. Design, Modelling, and Control of an Ambidextrous Robot Arm. Ph.D. Thesis, Brunel University London, London, UK, 2020. [Google Scholar]
- Taheri, O.; Ghorbani, N.; Black, M.J.; Tzionas, D. GRAB: A dataset of whole-body human grasping of objects. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Cham, Switzerland, 2020; pp. 581–600. [Google Scholar]
- Cini, F.; Ortenzi, V.; Corke, P.; Controzzi, M. On the choice of grasp type and location when handing over an object. Sci. Robot. 2019, 4, eaau9757. [Google Scholar] [CrossRef]
- Feix, T.; Bullock, I.M.; Dollar, A.M. Analysis of human grasping behavior: Object characteristics and grasp type. IEEE Trans. Haptics 2014, 7, 311–323. [Google Scholar] [CrossRef]
- Prakash, B.; Veeregowda, B.; Krishnappa, G. Biofilms: A survival strategy of bacteria. Curr. Sci. 2003, 85, 1299–1307. [Google Scholar]
- Song, E.J.; Lee, J.S.; Moon, H.; Choi, H.R.; Koo, J.C. A Multi-Curvature, Variable Stiffness Soft Gripper for Enhanced Grasping Operations. Actuators 2021, 10, 316. [Google Scholar] [CrossRef]
- Liu, C.H.; Chung, F.M.; Ho, Y.P. Topology Optimization for Design of a 3D-Printed Constant-Force Compliant Finger. IEEE/ASME Trans. Mechatron. 2021, 26, 1828–1836. [Google Scholar] [CrossRef]
- Chen, C.C.; Lan, C.C. An Accurate Force Regulation Mechanism for High-Speed Handling of Fragile Objects Using Pneumatic Grippers. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1600–1608. [Google Scholar] [CrossRef]
- Xu, Q. Design and Development of a Novel Compliant Gripper With Integrated Position and Grasping/Interaction Force Sensing. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1415–1428. [Google Scholar] [CrossRef]
- Suebsomran, A. Development of Robot Gripper and Force Control. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 433–437. [Google Scholar] [CrossRef]
- Zaki, A.M.; Soliman, A.M.; Mahgoub, O.A.; El-Shafei, A. Design and implementation of efficient intelligent robotic gripper. In Proceedings of the 2010 International Conference on Modelling, Identification and Control, Okayama City, Japan, 17–19 July 2010; pp. 710–716. [Google Scholar]
- Nishimura, T.; Tennomi, M.; Suzuki, Y.; Tsuji, T.; Watanabe, T. Lightweight, High-Force Gripper Inspired by Chuck Clamping Devices. IEEE Robot. Autom. Lett. 2018, 3, 1354–1361. [Google Scholar] [CrossRef]
- Nie, K.; Wan, W.; Harada, K. A Hand Combining Two Simple Grippers to Pick Up and Arrange Objects for Assembly. IEEE Robot. Autom. Lett. 2019, 4, 958–965. [Google Scholar] [CrossRef]
- Mahmoud, R.; Ueno, A.; Tatsumi, S. Dexterous mechanism design for an anthropomorphic artificial hand: Osaka City University Hand I. In Proceedings of the 2010 10th IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 180–185. [Google Scholar] [CrossRef]
- Wattanasiri, P.; Tangpornprasert, P.; Virulsri, C. Design of Multi-Grip Patterns Prosthetic Hand With Single Actuator. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1188–1198. [Google Scholar] [CrossRef]
- Wu, C.; Song, T.; Wu, Z.; Cao, Q.; Fei, F.; Yang, D.; Xu, B.; Song, A. Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand. Micromachines 2021, 12, 33. [Google Scholar] [CrossRef]
- Lu, Q.; Clark, A.B.; Shen, M.; Rojas, N. An Origami-Inspired Variable Friction Surface for Increasing the Dexterity of Robotic Grippers. IEEE Robot. Autom. Lett. 2020, 5, 2538–2545. [Google Scholar] [CrossRef]
- Marullo, S.; Bartoccini, S.; Salvietti, G.; Iqbal, M.Z.; Prattichizzo, D. The Mag-Gripper: A Soft-Rigid Gripper Augmented With an Electromagnet to Precisely Handle Clothes. IEEE Robot. Autom. Lett. 2020, 5, 6591–6598. [Google Scholar] [CrossRef]
- Datta, R.; Pradhan, S.; Bhattacharya, B. Analysis and Design Optimization of a Robotic Gripper Using Multiobjective Genetic Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 16–26. [Google Scholar] [CrossRef]
- Netzev, M.; Angleraud, A.; Pieters, R. Soft Robotic Gripper With Compliant Cell Stacks for Industrial Part Handling. IEEE Robot. Autom. Lett. 2020, 5, 6821–6828. [Google Scholar] [CrossRef]
- Lee, K.; Wang, Y.; Zheng, C. TWISTER Hand: Underactuated Robotic Gripper Inspired by Origami Twisted Tower. IEEE Trans. Robot. 2020, 36, 488–500. [Google Scholar] [CrossRef]
- Donaire, S.; Borràs, J.; Alenyà, G.; Torras, C. A Versatile Gripper for Cloth Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 6520–6527. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, H.; Yuan, H.; Liang, B. A Compliant Adaptive Gripper and Its Intrinsic Force Sensing Method. IEEE Trans. Robot. 2021, 37, 1584–1603. [Google Scholar] [CrossRef]
- Chen, F.; Gao, Y.; Dong, W.; Du, Z. Design and Control of a Passive Compliant Piezo-Actuated Micro-Gripper With Hybrid Flexure Hinges. IEEE Trans. Ind. Electron. 2021, 68, 11168–11177. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Y.; Xu, Q. Design and Control of a Novel Compliant Constant-Force Gripper Based on Buckled Fixed-Guided Beams. IEEE/ASME Trans. Mechatron. 2017, 22, 476–486. [Google Scholar] [CrossRef]
- Birglen, L.; Gosselin, C. On the force capability of underactuated fingers. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 4–19 September 2003; Volume 1, pp. 1139–1145. [Google Scholar] [CrossRef]
- Fontanelli, G.A.; Paduano, G.; Caccavale, R.; Arpenti, P.; Lippiello, V.; Villani, L.; Siciliano, B. A Reconfigurable Gripper for Robotic Autonomous Depalletizing in Supermarket Logistics. IEEE Robot. Autom. Lett. 2020, 5, 4612–4617. [Google Scholar] [CrossRef]
- Telegenov, K.; Tlegenov, Y.; Shintemirov, A. An underactuated adaptive 3D printed robotic gripper. In Proceedings of the 2014 10th France-Japan/8th Europe-Asia Congress on Mecatronics (MECATRONICS2014-Tokyo), Tokyo, Japan, 27–29 November 2014; pp. 110–115. [Google Scholar] [CrossRef]
- Li, X.L.; Wu, L.C.; Lan, T.Y. A 3D-Printed Robot Hand with Three Linkage-Driven Underactuated Fingers. Int. J. Autom. Comput. 2018, 15, 593–602. [Google Scholar] [CrossRef]
- Tlegenov, Y.; Telegenov, K.; Shintemirov, A. An open-source 3D printed underactuated robotic gripper. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Telegenov, K.; Tlegenov, Y.; Shintemirov, A. A Low-Cost Open-Source 3-D-Printed Three-Finger Gripper Platform for Research and Educational Purposes. IEEE Access 2015, 3, 638–647. [Google Scholar] [CrossRef]
- Birglen, L.; Gosselin, C.M. Geometric Design of Three-Phalanx Underactuated Fingers. J. Mech. Des. 2005, 128, 356–364. Available online: http://xxx.lanl.gov/abs/https://asmedigitalcollection.asme.org/mechanicaldesign/article-pdf/128/2/356/5688285/356_1.pdf (accessed on 31 December 2022). [CrossRef]
- Birglen, L.; Gosselin, C. Kinetostatic analysis of underactuated fingers. IEEE Trans. Robot. Autom. 2004, 20, 211–221. [Google Scholar] [CrossRef]
- Melchiorri, C.; Vassura, G. Design of a Three-Finger Gripper for Intra-Vehicular Robotic Manipulation. In Proceedings of the IFAC Workshop on Space Robotics (SPRO’98), St-Hubert, QC, Canada, 19–22 October 1998; IFAC Proceedings Volumes. Volume 31, pp. 7–12. [Google Scholar] [CrossRef]
- Kim, Y.J.; Song, H.; Maeng, C.Y. BLT Gripper: An Adaptive Gripper With Active Transition Capability Between Precise Pinch and Compliant Grasp. IEEE Robot. Autom. Lett. 2020, 5, 5518–5525. [Google Scholar] [CrossRef]
- Firouzeh, A.; Paik, J. Grasp Mode and Compliance Control of an Underactuated Origami Gripper Using Adjustable Stiffness Joints. IEEE/ASME Trans. Mechatron. 2017, 22, 2165–2173. [Google Scholar] [CrossRef]
- Ko, T. A Tendon-Driven Robot Gripper With Passively Switchable Underactuated Surface and its Physics Simulation Based Parameter Optimization. IEEE Robot. Autom. Lett. 2020, 5, 5002–5009. [Google Scholar] [CrossRef]
- Hussain, I.; Renda, F.; Iqbal, Z.; Malvezzi, M.; Salvietti, G.; Seneviratne, L.; Gan, D.; Prattichizzo, D. Modeling and Prototyping of an Underactuated Gripper Exploiting Joint Compliance and Modularity. IEEE Robot. Autom. Lett. 2018, 3, 2854–2861. [Google Scholar] [CrossRef]
- Lee, W.C.; Wu, C.W. Design and analysis of a novel robotic gripper integrated with a three-phalanx finger. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2014, 228, 1786–1796. [Google Scholar] [CrossRef]
- Su, Y.; Fang, Z.; Zhu, W.; Sun, X.; Zhu, Y.; Wang, H.; Tang, K.; Huang, H.; Liu, S.; Wang, Z. A High-Payload Proprioceptive Hybrid Robotic Gripper With Soft Origamic Actuators. IEEE Robot. Autom. Lett. 2020, 5, 3003–3010. [Google Scholar] [CrossRef]
- Ku, S.; Myeong, J.; Kim, H.Y.; Park, Y.L. Delicate Fabric Handling Using a Soft Robotic Gripper With Embedded Microneedles. IEEE Robot. Autom. Lett. 2020, 5, 4852–4858. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Li, L.; Meng, Y.; Tian, Y. Load Sharing Design of a Multi-legged Adaptable Gripper With Gecko-Inspired Controllable Adhesion. IEEE Robot. Autom. Lett. 2021, 6, 8482–8489. [Google Scholar] [CrossRef]
- Hu, Q.; Dong, E.; Sun, D. Soft Gripper Design Based on the Integration of Flat Dry Adhesive, Soft Actuator, and Microspine. IEEE Trans. Robot. 2021, 37, 1065–1080. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Li, Y. Pre-Charged Pneumatic Soft Gripper With Closed-Loop Control. IEEE Robot. Autom. Lett. 2019, 4, 1402–1408. [Google Scholar] [CrossRef]
- Pagoli, A.; Chapelle, F.; Corrales, J.A.; Mezouar, Y.; Lapusta, Y. A Soft Robotic Gripper With an Active Palm and Reconfigurable Fingers for Fully Dexterous In-Hand Manipulation. IEEE Robot. Autom. Lett. 2021, 6, 7706–7713. [Google Scholar] [CrossRef]
- Park, W.; Seo, S.; Bae, J. A Hybrid Gripper With Soft Material and Rigid Structures. IEEE Robot. Autom. Lett. 2019, 4, 65–72. [Google Scholar] [CrossRef]
- Gao, G.; Chang, C.M.; Gerez, L.; Liarokapis, M. A Pneumatically Driven, Disposable, Soft Robotic Gripper Equipped With Multi-Stage, Retractable, Telescopic Fingers. IEEE Trans. Med. Robot. Bionics 2021, 3, 573–582. [Google Scholar] [CrossRef]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Tian, Y.; Zhang, D. A Two-Finger Soft-Robotic Gripper With Enveloping and Pinching Grasping Modes. IEEE/ASME Trans. Mechatron. 2021, 26, 146–155. [Google Scholar] [CrossRef]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A Soft Robotic Gripper With Gecko-Inspired Adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Nie, S.; Liu, X.; Ji, H.; Ma, Z.; Yin, F. Simulation and Experiment Study on Deformation Characteristics of the Water Hydraulic Flexible Actuator Used for the Underwater Gripper. IEEE Access 2020, 8, 191447–191459. [Google Scholar] [CrossRef]
- Hwang, G.; Park, J.; Cortes, D.S.D.; Hyeon, K.; Kyung, K.U. Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure. IEEE Trans. Ind. Electron. 2022, 69, 642–651. [Google Scholar] [CrossRef]
- Krahn, J.M.; Fabbro, F.; Menon, C. A Soft-Touch Gripper for Grasping Delicate Objects. IEEE/ASME Trans. Mechatron. 2017, 22, 1276–1286. [Google Scholar] [CrossRef]
- Li, L.; Jin, T.; Tian, Y.; Yang, F.; Xi, F. Design and Analysis of a Square-Shaped Continuum Robot With Better Grasping Ability. IEEE Access 2019, 7, 57151–57162. [Google Scholar] [CrossRef]
- Sanjuan, J.; Serje, D.; Pacheco, J. Closed form solution for direct and inverse kinematics of a US-RS-RPS 2-DOF parallel robot. Sci. Iran. 2018, 25, 2144–2154. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Wan, W.; Harada, K. Designing a Mechanical Tool for Robots With Two-Finger Parallel Grippers. IEEE Robot. Autom. Lett. 2019, 4, 2981–2988. [Google Scholar] [CrossRef]
- Pellerin, C. The salisbury hand. Ind. Robot. Int. J. 1991, 18, 25–26. [Google Scholar] [CrossRef]
- Butterfass, J.; Grebenstein, M.; Liu, H.; Hirzinger, G. DLR-Hand II: Next generation of a dextrous robot hand. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 1, pp. 109–114. [Google Scholar] [CrossRef]
- Townsend, W. The BarrettHand grasper–programmably flexible part handling and assembly. Ind. Robot. Int. J. 2000, 27, 181–188. [Google Scholar] [CrossRef]
- Tai, K.; El-Sayed, A.R.; Shahriari, M.; Biglarbegian, M.; Mahmud, S. State of the Art Robotic Grippers and Applications. Robotics 2016, 5, 11. [Google Scholar] [CrossRef]
- Ruehl, S.W.; Parlitz, C.; Heppner, G.; Hermann, A.; Roennau, A.; Dillmann, R. Experimental evaluation of the schunk 5-finger gripping hand for grasping tasks. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2465–2470. [Google Scholar]
- Ogden, R. Non-Linear Elastic Deformations, Courier Corporation; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1984. [Google Scholar]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Wakimoto, S.; Suzumori, K.; Ogura, K. Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Adv. Robot. 2011, 25, 1311–1330. [Google Scholar] [CrossRef]
- Steck, D.; Qu, J.; Kordmahale, S.B.; Tscharnuter, D.; Muliana, A.; Kameoka, J. Mechanical responses of Ecoflex silicone rubber: Compressible and incompressible behaviors. J. Appl. Polym. Sci. 2019, 136, 47025. [Google Scholar] [CrossRef]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 4975–4980. [Google Scholar]
- Wakimoto, S.; Ogura, K.; Suzumori, K.; Nishioka, Y. Miniature soft hand with curling rubber pneumatic actuators. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; Piscataway, NJ, USA, 2009; pp. 556–561. [Google Scholar]
- Zhang, J.; Wang, H.; Tang, J.; Guo, H.; Hong, J. Modeling and design of a soft pneumatic finger for hand rehabilitation. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2460–2465. [Google Scholar]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- Wang, Y.; Gupta, U.; Parulekar, N.; Zhu, J. A soft gripper of fast speed and low energy consumption. Sci. China Technol. Sci. 2019, 62, 31–38. [Google Scholar] [CrossRef]
- Xu, L.; Gu, G. Bioinspired Venus flytrap: A dielectric elastomer actuated soft gripper. In Proceedings of the 2017 24th International Conference on Mechatron. and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–3. [Google Scholar]
- Chan, K.C.; Cheung, N. Grasping of delicate objects by a novel two-finger variable reluctance gripper. In Proceedings of the Conference Record of the 2001 IEEE Industry Applications Conference, 36th IAS Annual Meeting (Cat. No.01CH37248), Chicago, IL, USA, 30 September–4 October 2001; Volume 3, pp. 1969–1974. [Google Scholar] [CrossRef]
- Kuang, L.; Lou, Y.; Song, S. Design and Fabrication of a Novel Force Sensor for Robot Grippers. IEEE Sensors J. 2018, 18, 1410–1418. [Google Scholar] [CrossRef]
- Barsky, M.; Lindner, D.; Claus, R. Robot gripper control system using PVDF piezoelectric sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 129–134. [Google Scholar] [CrossRef]























































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Completely constrained | Compliant mechanism | Cable driven | [6] |
| linear actuator | [1,30,31,32] | ||
| Rigid links | Linear actuator | [33,34,35] | |
| Rotary actuator | [36,37,38] | ||
| Cable driven | [4,39,40] | ||
| Electromagnet | [41,42] | ||
| Underconstrained | Compliant mechanism | unspecified | [43] |
| Cable driven | [14,44] | ||
| Rotary actuator | [45] | ||
| Linear actuator | [46] | ||
| Piezo actuator | [47,48] | ||
| Rigid links | Linear actuator | [15,49,50] | |
| Rotary actuator | [10,51,52,53,54] | ||
| Cable driven | [5,9,12,13,55,56,57,58,59,60,61,62] | ||
| Pneumatic actuation | [63] | ||
| Deformable | Single mass gripper | Vacuum | [2,11,64] |
| Cable driven | [8,65,66] | ||
| single mass finger | Pneumatic/Hydraulic actuation | [7,67,68,69,70,71,72,73] | |
| Dielectric elastomer (DE) actuator | [74] | ||
| Linear actuator | [75] | ||
| Square continuum robot | Cable driven | [76] |
| Type 1 | Type 2 | Gripper Design | Papers | Attributes |
|---|---|---|---|---|
| Size | Small | Deformable-Single mass | [16] | Size of 25 mm to 31.5 mm |
| Completely constrained-rigid links | [36,96] | |||
| Underconstrained-compliant mechanism | [47] | |||
| Completely constrained-Clompliant mechanism | [97] | |||
| Underconstrained-Rigid links | [59] | |||
| Medium | Completely constrained-Clompliant mechanism | [1,6] | Size of 31.5 mm to 80 mm | |
| Completely constrained-rigid links | [57] | |||
| Underconstrained-Rigid links | [13] | |||
| Deformable-single gripper | [7,74] | |||
| Deformable-Single mass | [11,75] | |||
| Large | Underconstrained-Rigid links | [50] | Size of 10 cm to 50 | |
| Shape | Circular | Completely constrained-Rigid links | [31,33,35,39] | circular objects like eggs, fruits, tennis balls, or water bottles |
| Underconstrained-Rigid links | [13,49] | |||
| Deformable-Single mass | [66,71] | |||
| Squared | Completely constrained-rigid links | [98] | square objects like cardboard boxes, cellphones, or plastic cards | |
| Underconstrained-Rigid links | [50] | |||
| irregular | Completely constrained-rigid links | [34] | Irregular objects like foam or rocks | |
| Underconstrained-Rigid links | [12,15,59] | |||
| Deformable-Single mass | [8,11,65,66,68,73,75] | |||
| Underconstrained-compliant mechanism | [46] | |||
| Material | Delicate | Completely constrained-Clompliant mechanism | [1] | Delicate objects like eggs |
| Completely constrained-Rigid links | [31,33] | |||
| Deformable-single gripper | [7] | |||
| Deformable-Single mass | [8,75] | |||
| Underconstrained-compliant mechanism | [43,44,48] | |||
| Fabric | Underconstrained-compliant mechanism | [44,45] | Types of fabric like cotton or linen | |
| Deformable-Single mass | [64] | |||
| Completely constrained-rigid links | [40,41] | |||
| Electronic | Deformable-Single mass | [16] | electrical objects like coils | |
| Completely constrained-rigid links | [32] | |||
| Rocks and Soils | Underconstrained-Rigid links | [5] | General shape rocks | |
| Food | Deformable-Single mass | [8] | food like spaghetti, salmon, fried chicken, among others. | |
| Daily Objects | Underconstrained-Rigid links | [10,15,53,54,58,61,63] | objects like pencils, bottles, whiteboard erasers, or balls | |
| Underconstrained-compliant mechanism | [14] | |||
| Deformable-single mass | [69,70] | |||
| Type | Description | Load Capacity | Range of Motion | Type of Objects |
|---|---|---|---|---|
| Completely constrained grippers | This type of mechanism can exert greater forces, which is why it is especially used in applications where heavy objects must be moved. However, it cannot be attached to different shapes with ease. | These mechanisms can support very heavy objects (more than 10 kg). | The ranges depend on the application, but being rigid, they have geometric limitations due to their mechanism, so they have a range of movement between 2.2 mm and 170 mm | They are excellent at holding rigid objects. They can also hold more fragile objects if they have a force sensor. However, they are not recommended for this application. |
| Underconstrained grippers | These mechanisms offer a balance between flexibility and strength. Possessing rigid joints, it can support heavy weights while adapting to most objects’ shapes. As a result, it is ideal for applications where the environment is uncontrolled or unpredictable. | They have a maximum descending load, up to 5 kg. | They have a descending range from a few millimeters to 120 mm. However, again, this range will depend on your design and application. | This mechanism can grab a wide range of objects such as a glass of water; pill bottle, book; smartphone; pringle; shoes; cereal boxes; apples; bread, among many others. |
| Deformable grippers | In contrast to the two previously mentioned mechanisms, this one cannot exert large amounts of force. This could be an advantage or a disadvantage, depending on the application. However, being flexible, they can adapt to all shapes, and their lack of strength is a positive factor when holding fragile objects. | They have little carrying capacity, ranging from grams to a few kilograms. | By being able to deform, they can twist their fingers backward, giving a much greater range than previous mechanisms. Some of these grippers can hold as much as a pill, up to a soccer ball (between 8 mm and 200 mm). | It practically conforms to the contour of the object you want to hold, no matter how irregular it is. this includes amorphous objects, such as rocks or any complicated surface. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernandez, J.; Sunny, M.S.H.; Sanjuan, J.; Rulik, I.; Zarif, M.I.I.; Ahamed, S.I.; Ahmed, H.U.; Rahman, M.H. Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review. Robotics 2023, 12, 5. https://doi.org/10.3390/robotics12010005
Hernandez J, Sunny MSH, Sanjuan J, Rulik I, Zarif MII, Ahamed SI, Ahmed HU, Rahman MH. Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review. Robotics. 2023; 12(1):5. https://doi.org/10.3390/robotics12010005
Chicago/Turabian StyleHernandez, Jaime, Md Samiul Haque Sunny, Javier Sanjuan, Ivan Rulik, Md Ishrak Islam Zarif, Sheikh Iqbal Ahamed, Helal Uddin Ahmed, and Mohammad H Rahman. 2023. "Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review" Robotics 12, no. 1: 5. https://doi.org/10.3390/robotics12010005
APA StyleHernandez, J., Sunny, M. S. H., Sanjuan, J., Rulik, I., Zarif, M. I. I., Ahamed, S. I., Ahmed, H. U., & Rahman, M. H. (2023). Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review. Robotics, 12(1), 5. https://doi.org/10.3390/robotics12010005