Time Coordination and Collision Avoidance Using Leader-Follower Strategies in Multi-Vehicle Missions

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Cooperative Control Framework
2.1. Optimal Motion Planning
2.2. Virtual Target Tracking
3. Time Coordination Problem
- The ith vehicle can only communicate with a neighboring set of vehicles, here referred to as.
- The communication between the vehicles is bidirectional and with no time delays.
- The connectivity of the communication graph satisfies the Persistency of Excitation (PE)-like condition:with and .
4. Collision Avoidance Problem
- 1.
- There exists such that, iffor all , then
- 2.
- There exists such that, iffor all , then
5. Control Law
5.1. Time-Coordination Control Law
5.2. Collision-Avoidance Control Law
5.2.1. Case 1: Collision Avoidance by Setting
5.2.2. Case 2: Collision Avoidance by Setting
6. Main Results
6.1. Time Coordination
6.2. Collision Avoidance
7. Experimental Results
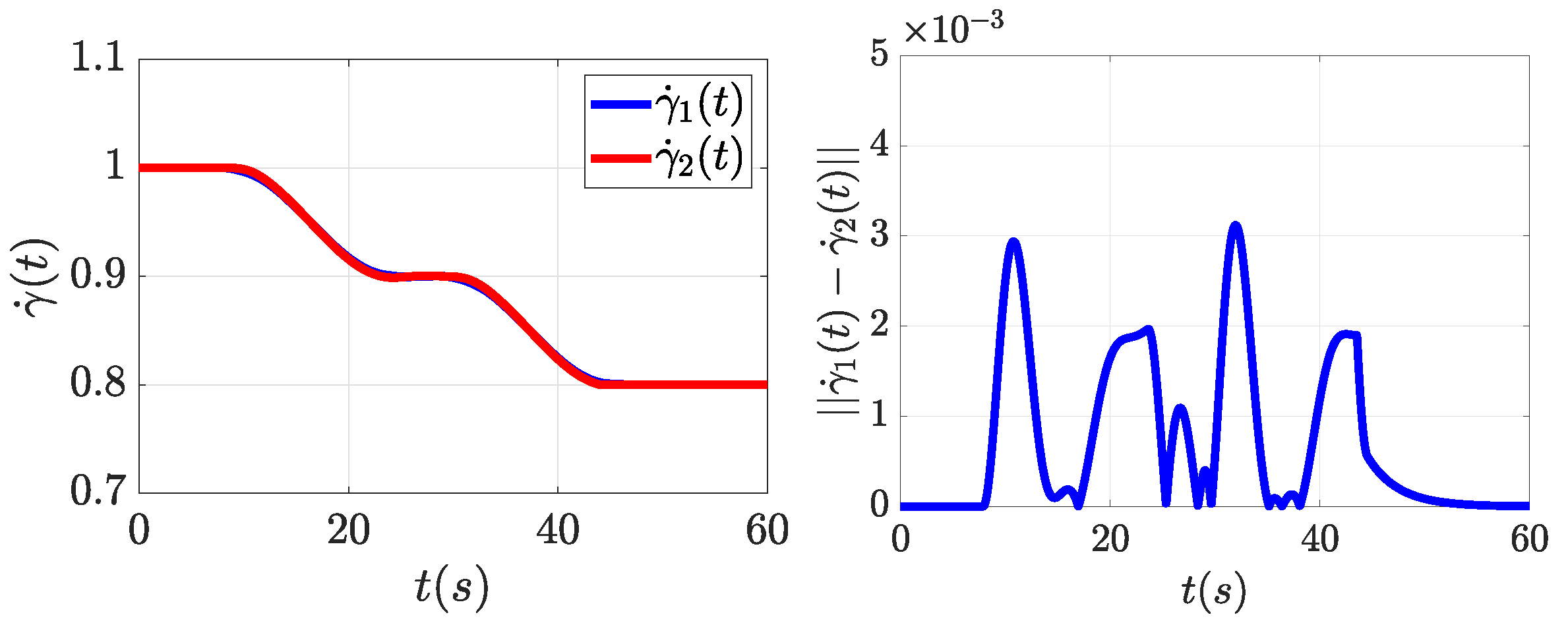
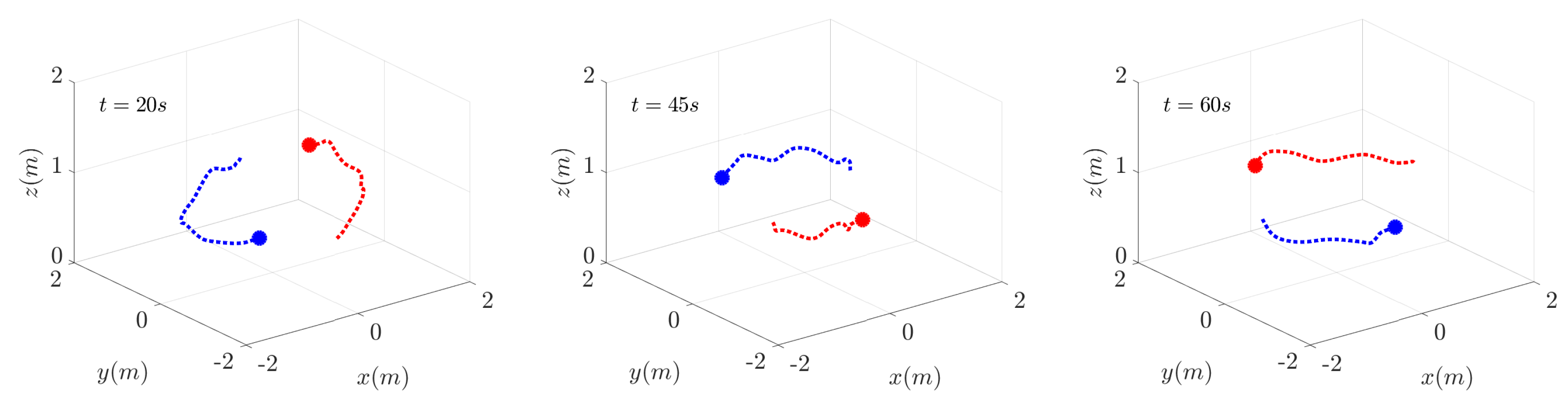
7.1. Time Coordination
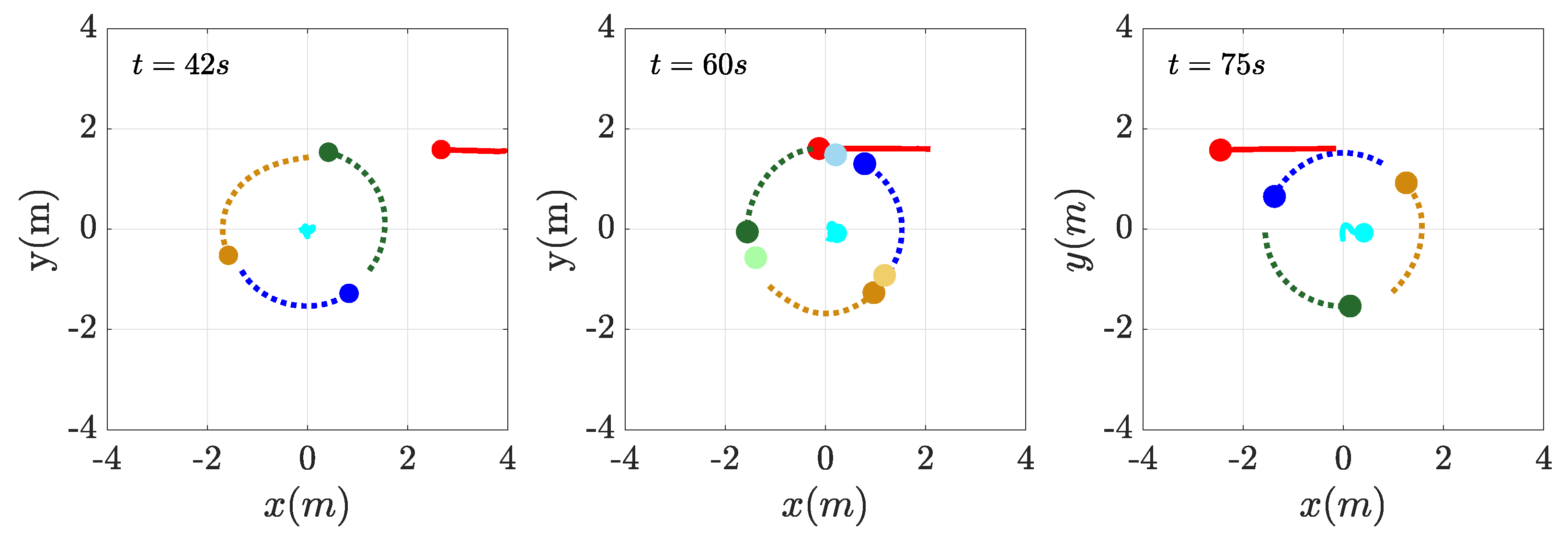
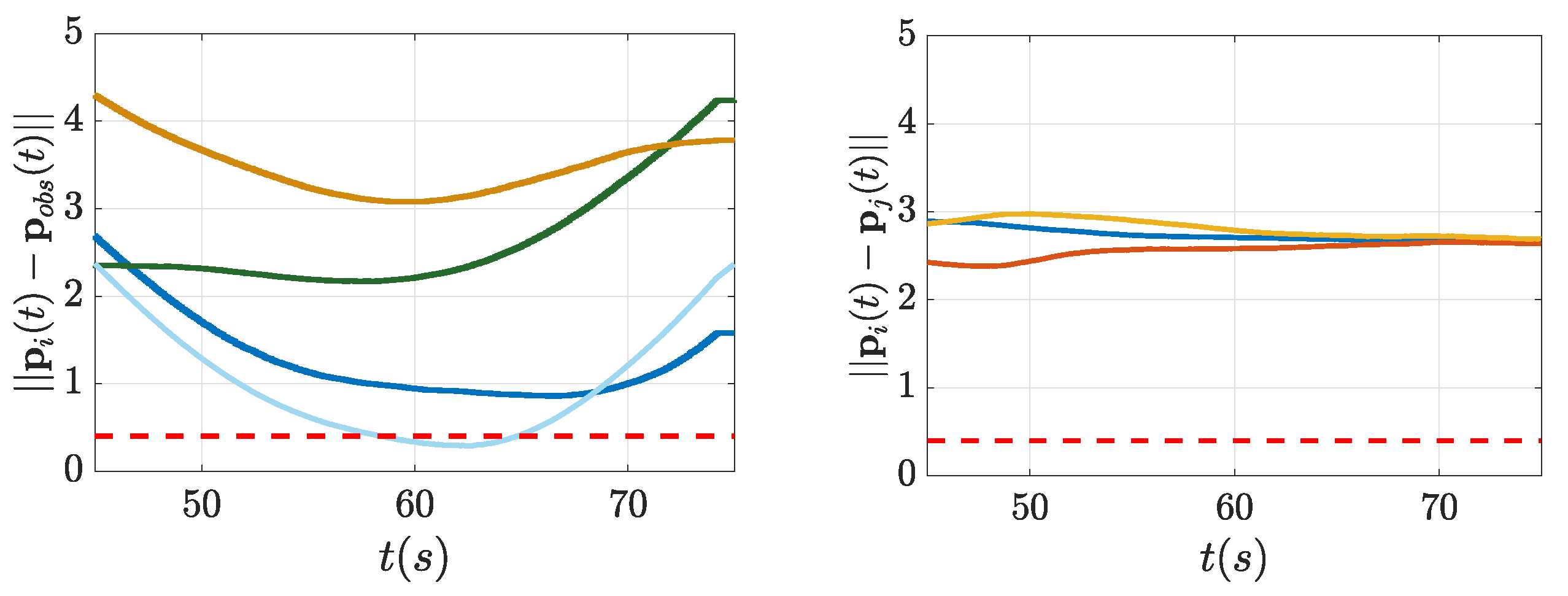
7.2. Collision Avoidance
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Theorem 1
Appendix B. Proof of Theorem 2
Appendix C. Proof of Equation (A5)
References
- Digani, V.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Ensemble Coordination Approach in Multi-AGV Systems Applied to Industrial Warehouses. IEEE Trans. Autom. Sci. Eng. 2015, 12, 922–934. [Google Scholar] [CrossRef]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef]
- Sherman, T.; Tellez, J.; Cady, T.; Herrera, J.; Haideri, H.; Lopez, J.; Caudle, M.; Bhandari, S.; Tang, D. Cooperative Search and Rescue using Autonomous Unmanned Aerial Vehicles. J. Guid. Control Dyn. 2014, 37, 750–765. [Google Scholar] [CrossRef]
- Adaldo, A.; Mansouri, S.S.; Kanellakis, C.; Dimarogonas, D.V.; Johansson, K.H.; Nikolakopoulos, G. Cooperative coverage for surveillance of 3D structures. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar] [CrossRef]
- Capitan, J.; Merino, L.; Ollero, A. Cooperative decision-making under uncertainties for multi-target surveillance with multiples UAVs. J. Intell. Robot. Syst. 2016, 84, 371–386. [Google Scholar] [CrossRef]
- Hamer, M.; Widmer, L.; D’andrea, R. Fast generation of collision-free trajectories for robot swarms using GPU acceleration. IEEE Access 2018, 7, 6679–6690. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control With Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Hausler, A.J.; Saccon, A.; Aguiar, A.P.; Hauser, J.; Pascoal, A.M. Energy-Optimal Motion Planning for Multiple Robotic Vehicles With Collision Avoidance. IEEE Trans. Control Syst. Technol. 2016, 24, 867–883. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Van Gelder, P. Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Velasco, G.A.M.; Borst, C.; Ellerbroek, J.; Van Paassen, M.; Mulder, M. The use of intent information in conflict detection and resolution models based on dynamic velocity obstacles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2297–2302. [Google Scholar] [CrossRef]
- Chen, Y.F.; Liu, M.; Everett, M.; How, J.P. Decentralized non-communicating multiagent collision avoidance with deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 285–292. [Google Scholar]
- Long, P.; Fanl, T.; Liao, X.; Liu, W.; Zhang, H.; Pan, J. Towards optimally decentralized multi-robot collision avoidance via deep reinforcement learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6252–6259. [Google Scholar]
- Cappello, D.; Garcin, S.; Mao, Z.; Sassano, M.; Paranjape, A.; Mylvaganam, T. A hybrid controller for multi-agent collision avoidance via a differential game formulation. IEEE Trans. Control Syst. Technol. 2020, 1–8. [Google Scholar] [CrossRef]
- Mylvaganam, T.; Sassano, M.; Astolfi, A. A differential game approach to multi-agent collision avoidance. IEEE Trans. Autom. Control 2017, 62, 4229–4235. [Google Scholar] [CrossRef]
- Mylvaganam, T.; Sassano, M. Autonomous collision avoidance for wheeled mobile robots using a differential game approach. Eur. J. Control 2018, 40, 53–61. [Google Scholar] [CrossRef]
- Singh, Y.; Bibuli, M.; Zereik, E.; Sharma, S.; Khan, A.; Sutton, R. A Novel Double Layered Hybrid Multi-Robot Framework for Guidance and Navigation of Unmanned Surface Vehicles in a Practical Maritime Environment. J. Mar. Sci. Eng. 2020, 8, 624. [Google Scholar] [CrossRef]
- Sun, J.; Tang, J.; Lao, S. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Eun, Y.; Bang, H. Cooperative control of multiple unmanned aerial vehicles using the potential field theory. J. Aircr. 2006, 43, 1805–1814. [Google Scholar] [CrossRef]
- Tony, L.A.; Ghose, D.; Chakravarthy, A. Avoidance maps: A new concept in uav collision avoidance. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, Miami, FL, USA, 13–16 June 2017; pp. 1483–1492. [Google Scholar]
- Lalish, E.; Morgansen, K.A. Distributed reactive collision avoidance. Auton. Robots 2012, 32, 207–226. [Google Scholar] [CrossRef]
- Cichella, V.; Choe, R.; Mehdi, B.S.; Xargay, E.; Hovakimyan, N.; Trujillo, A.C.; Kaminer, I. Trajectory generation and collision avoidance for safe operation of cooperating UAVs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MD, USA, 13–17 January 2014; p. 0972. [Google Scholar]
- Mehdi, S.B.; Cichella, V.; Marinho, T.; Hovakimyan, N. Collision avoidance in multi-vehicle cooperative missions using speed adjustment. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 2152–2157. [Google Scholar]
- Tabasso, C.; Cichella, V.; Mehdi, S.B.; Marinho, T.; Hovakimyan, N. Guaranteed Collision Avoidance in Multivehicle Cooperative Missions Using Speed Adjustment. J. Aerosp. Inf. Syst. 2020, 17, 436–453. [Google Scholar] [CrossRef]
- Xargay, E.; Kaminer, I.; Pascoal, A.; Hovakimyan, N.; Dobrokhodov, V.; Cichella, V.; Aguiar, A.; Ghabcheloo, R. Time-critical cooperative path following of multiple unmanned aerial vehicles over time-varying networks. J. Guid. Control Dyn. 2013, 36, 499–516. [Google Scholar] [CrossRef]
- Cichella, V.; Kaminer, I.; Dobrokhodov, V.; Xargay, E.; Choe, R.; Hovakimyan, N.; Aguiar, A.P.; Pascoal, A.M. Cooperative Path Following of Multiple Multirotors Over Time-Varying Networks. IEEE Trans. Autom. Sci. Eng. 2015, 12, 945–957. [Google Scholar] [CrossRef]
- Kaminer, I.; Pascoal, A.M.; Xargay, E.; Hovakimyan, N.; Cichella, V.; Dobrokhodov, V. Time-Critical Cooperative Control of Autonomous Air Vehicles; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Cichella, V. Cooperative Autonomous Systems: Motion Planning and Coordinated Tracking Control for Multi-Vehicle Missions. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2018. [Google Scholar]
- Tabasso, C.; Cichella, V. Multiple Leader-Follower Coordination for Cooperative Missions. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 19–21 January 2021; p. 1766. [Google Scholar]
- Choe, R.; Puig-Navarro, J.; Cichella, V.; Xargay, E.; Hovakimyan, N. Cooperative Trajectory Generation Using Pythagorean Hodograph Bézier Curves. J. Guid. Control Dyn. 2016, 39, 1744–1763. [Google Scholar] [CrossRef]
- Cichella, V.; Kaminer, I.; Walton, C.; Hovakimyan, N. Optimal motion planning for differentially flat systems using Bernstein approximation. IEEE Control Syst. Lett. 2018, 2, 181–186. [Google Scholar] [CrossRef]
- Cichella, V.; Kaminer, I.; Xargay, E.; Dobrokhodov, V.; Hovakimyan, N.; Aguiar, A.; António, M.; Pascoal, A. A Lyapunov-based Approach for Time-Coordinated 3D Path-Following of Multiple Quadrotors. In Proceedings of the 2012 IEEE 51st Annual Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 1776–1781. [Google Scholar] [CrossRef]
- Cichella, V.; Choe, R.; Mehdi, S.B.; Xargay, E.; Hovakimyan, N.; Dobrokhodov, V.; Kaminer, I.; Pascoal, A.M.; Aguiar, A.P. Safe Coordinated Maneuvering of Teams of Multirotor Unmanned Aerial Vehicles: A Cooperative Control Framework for Multivehicle, Time-Critical Missions. IEEE Control Syst. 2016, 36, 59–82. [Google Scholar] [CrossRef]
- Parrot AR Drone 2. Parrot. Available online: https://support.parrot.com/us/support/products/parrot-ar-drone-2 (accessed on 9 February 2021).
- TurtleBot 3 Burger. Robotis. Available online: https://www.robotis.us/turtlebot-3-burger-us/ (accessed on 9 February 2021).
- Loría, A.; Panteley, E. Uniform Exponential Stability of Linear Time-Varying Systems: Revisited. Syst. Control Lett. 2002, 47, 13–24. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tabasso, C.; Cichella, V.; Mehdi, S.B.; Marinho, T.; Hovakimyan, N. Time Coordination and Collision Avoidance Using Leader-Follower Strategies in Multi-Vehicle Missions. Robotics 2021, 10, 34. https://doi.org/10.3390/robotics10010034
Tabasso C, Cichella V, Mehdi SB, Marinho T, Hovakimyan N. Time Coordination and Collision Avoidance Using Leader-Follower Strategies in Multi-Vehicle Missions. Robotics. 2021; 10(1):34. https://doi.org/10.3390/robotics10010034
Chicago/Turabian StyleTabasso, Camilla, Venanzio Cichella, Syed Bilal Mehdi, Thiago Marinho, and Naira Hovakimyan. 2021. "Time Coordination and Collision Avoidance Using Leader-Follower Strategies in Multi-Vehicle Missions" Robotics 10, no. 1: 34. https://doi.org/10.3390/robotics10010034
APA StyleTabasso, C., Cichella, V., Mehdi, S. B., Marinho, T., & Hovakimyan, N. (2021). Time Coordination and Collision Avoidance Using Leader-Follower Strategies in Multi-Vehicle Missions. Robotics, 10(1), 34. https://doi.org/10.3390/robotics10010034