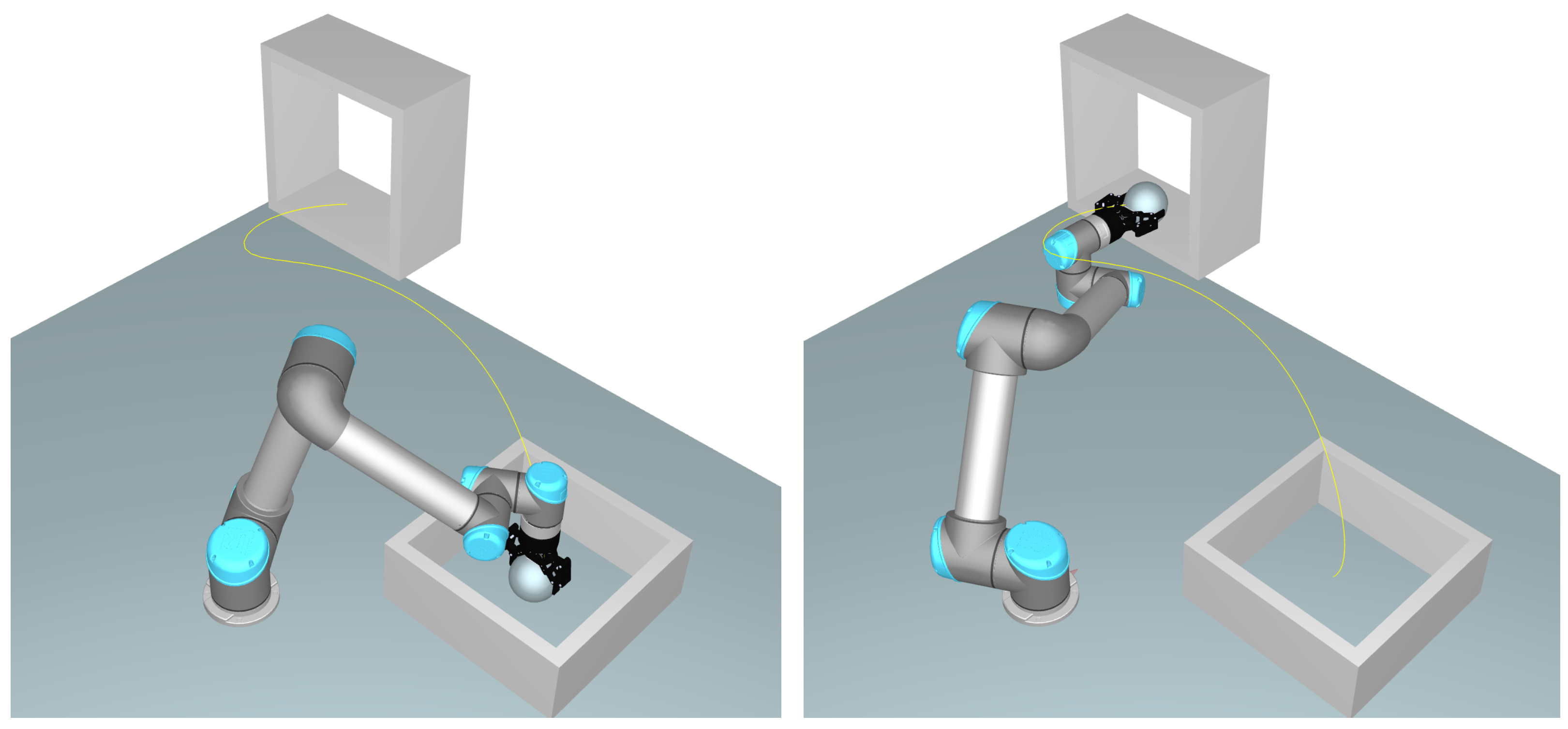
In this section, the presented models are used to estimate the LCC and GHG emissions for an exemplary pick-and-place operation as depicted in
Figure 1. The task itself can be partitioned into two phases: the first phase consists of picking up the workpiece at the initial position
and transporting it to the final position
. Two intermediate locations,
and
, are defined to avoid collisions with the obstacles. The second phase utilizes the same points in reverse. The location, orientation and configuration of the selected points for the task are given in
Table 1. Both phases are defined to have the same duration and take into account 1 s per phase for opening or closing the tool, while the robot holds the corresponding position. Thus, the duration of the motion in each phase can be derived from the total duration of one cycle
. For the multi-point trajectory, the duration of the motion is partitioned proportional to the maximum distance traveled in joint space into three individual intervals. A trajectory is generated in joint space via a piecewise spline of 5th degree to plan the motions of the robot, yielding smooth acceleration and velocity profiles. Angular acceleration and velocity are set to be zero at the start and end of the individual motions, respectively.
As the workpiece is placed at
, the payload in the first phase consists of the gripper and the workpiece, while only the weight of the gripper is considered as the payload during the second phase. Thus, the dynamic model of the robot is updated between the two phases. Therefore, the exemplary gripper 2F-85 (Robotiq Inc., Lévis, QC, Canada) is applied with an approximated weight of 1
, while the center of mass is located at a distance of
in z-direction with respect to the flange coordinate system. The center of gravity of the workpiece is assumed to be shifted an additional
in z-direction. By adapting Equation (
2), the corresponding mass and center of gravity of the payload can be calculated from the mass and center of gravity of tool and workpiece. The simulation software RoboDK (RoboDK Inc., Montreal, QC, Canada) is used to implement the task, determine the inverse kinematics and visualize the motion. The system dynamics are evaluated using a recursive Newton–Euler algorithm to directly provide the motor torque
and the torque related to the useful life of the reducers
.
For the evaluation, it is assumed that the robot perfectly follows the planned trajectory, and potentially occurring oscillations or vibrations are negligible. In addition, the degradation of the robot’s components during the useful life is assumed to not impact the performance, i.e., the energy consumed during one cycle remains constant. Furthermore, it is assumed that the effect of the environment, e.g., temperature or dust, as well as the consequence of events such as collisions or emergency stops during the operation, is not considered.
3.1. Estimation of Life Cycle Costs and Greenhouse Gas Emissions for Individual Components
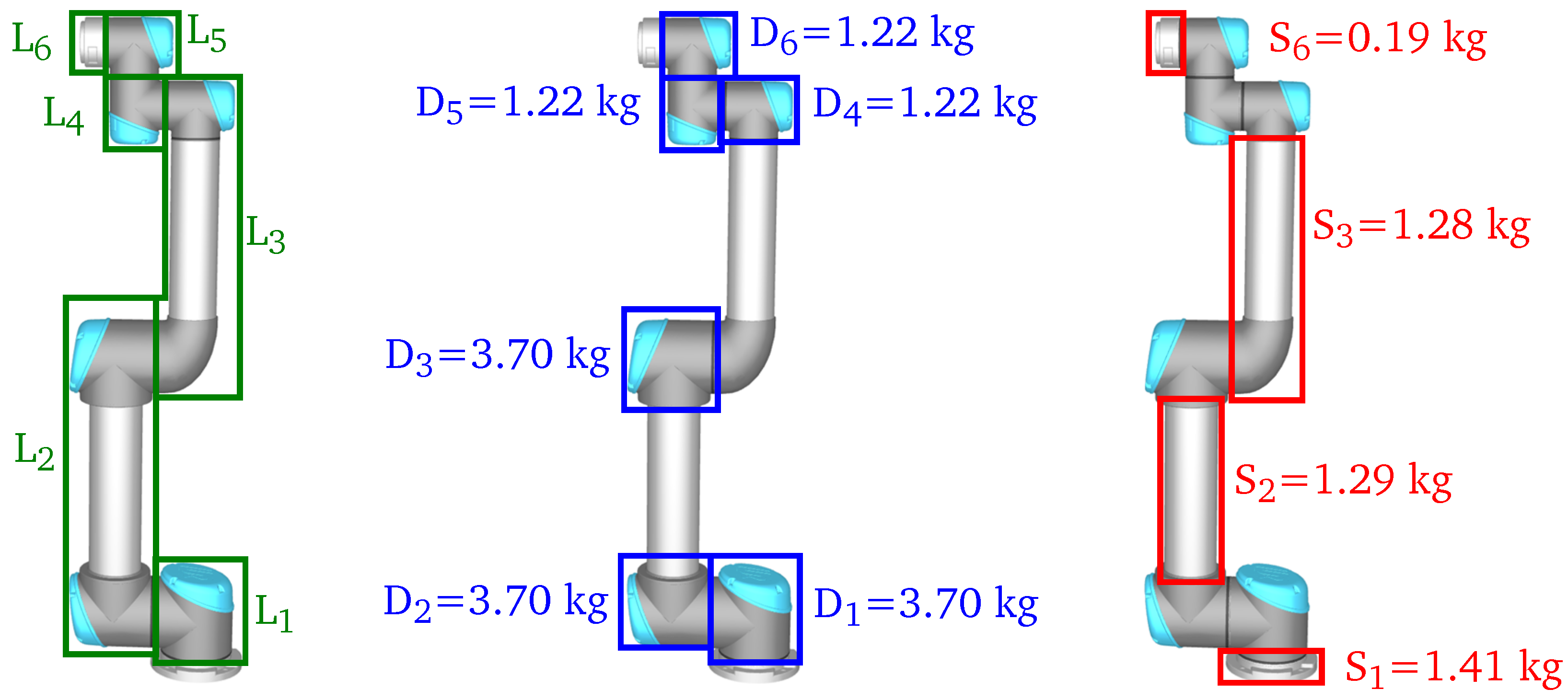
As a basis for the estimation of LCC and the GHG emissions, information of the acquisition and production phase of the robot as well as corresponding spare parts is required. Corresponding information is not publicly available to the best of the authors’ knowledge. Therefore, the robot is analyzed and the modular structure is segmented into one different drive module
per joint and structures
of each link
, as depicted in
Figure 3. Thereby, one drive module consists of a motor, motor brake, gear unit and sensors of each joint as well as the corresponding encasement. Based on the diameter of the robot, a larger module
is used for
and a smaller one
is applied for
. The remaining components of each link are apportioned to
and
. Based on the weight of each link and the corresponding components presented in
Table A1,
Table A2 and
Table A3, the weight of the drive modules is estimated. The remaining mass of each link is allocated to the appropriate structural elements. The resulting allocation is depicted in
Figure 3. In addition, the weight of the controller of 15
is considered in the LCA. Thereby, the estimated mass of each drive module and segment is only used for the LCA. The dynamic simulation is based on the mass properties of the robot in
Table A1 provided by the manufacturer and extended by the rotational inertia of the assumed reducers and motors, as presented in
Table A2 and
Table A3.
For the modeling of the GHG emissions resulting from the raw material extraction and processing as well as for the country-specific electricity mix, the background database ecoinvent (cutoff model, version 3.7) [
32] is integrated into the modeling. It is assumed that the operation phase of the robot system takes place in Germany and thus the German electricity mix is considered. The final product system and the compilation of the life cycle GHG emissions per functional unit is carried out using the software openLCA version 1.10.2. [
33]. In the life cycle inventory, the data collection of the modeled product system is carried out. For the production phase, the materials of each component in the drive module, structural element and the controller are estimated and respective data sets are generated. In the life cycle impact assessment, the GHG emissions over the modeled life cycle are compiled using the midpoint impact category Global Warming Potential 100 years according to the impact method IPCC 2013 [
34]. The results of the assessment for the production of robot and spare parts are presented in
Table 2 based on
CO
2-equivalents (eq.) and can be used in conjunction with Equation (
14) to estimate the environmental impact of the exemplary application.
The costs related to the acquisition and spare parts may vary distinctly depending on the type of robot, additional peripherals or safety equipment, as well as, for example, due to economies of scale. In the following, costs for the acquisition and spare parts are based on assumptions and only serve the clarification of the method. Corresponding estimated values are presented in
Table 3. The energy cost rate is taken from [
35] for non-household consumers, excluding VAT and other recoverable taxes and levies. Based on the values in
Table 3, Equation (
13) can be used to estimate the LCC for the exemplary application.
3.2. Evaluation of an Exemplary Task
In the following, the task with a duration of
and mass of the workpiece
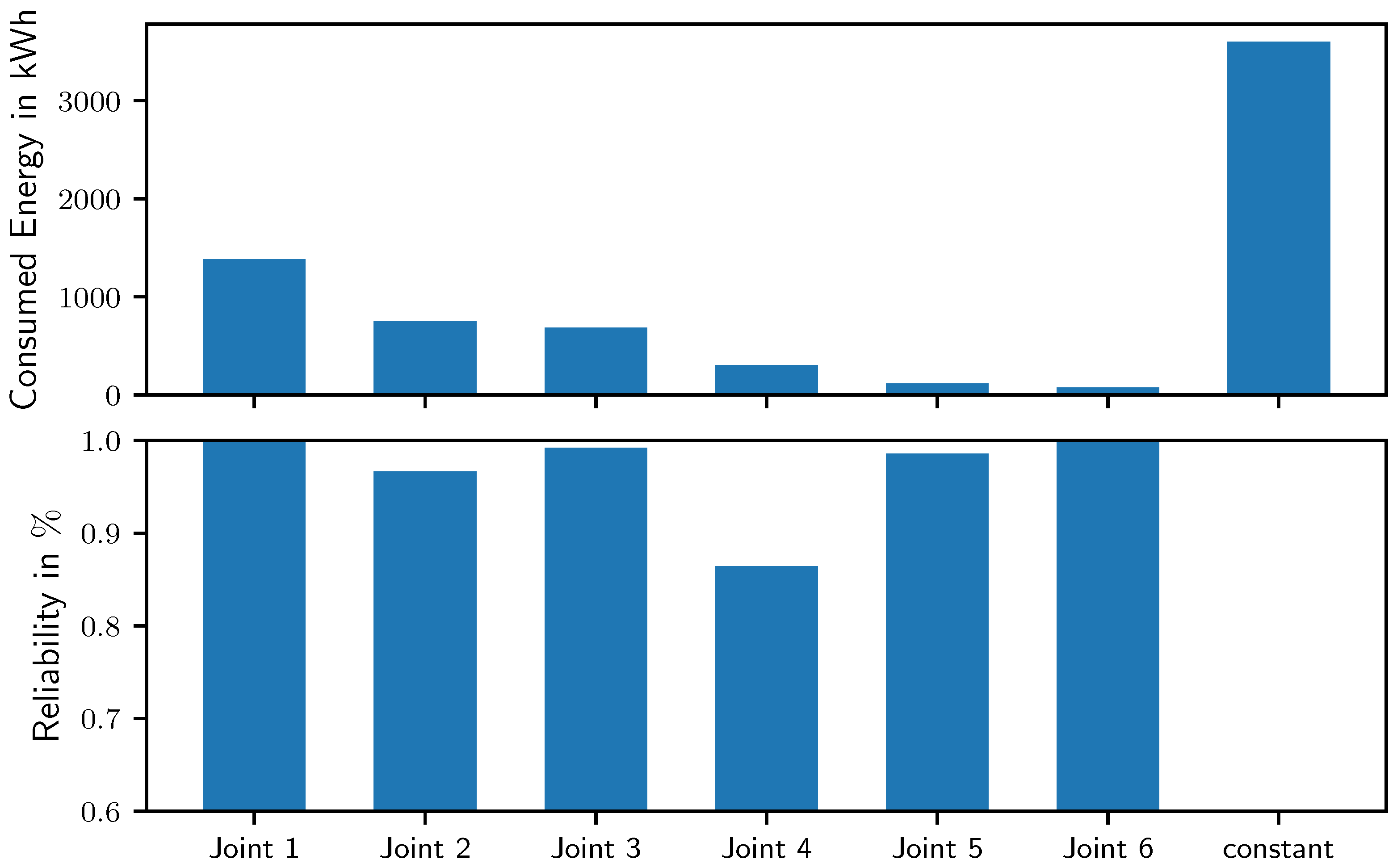
is analyzed in detail. Evaluating the trajectory in combination with a constant power consumption of
yields an estimated energy consumption of 6913
after
= 36,000 h of continuous operation. Analyzing the contribution presented in the top of
Figure 4 displays that approximately 50% of the cumulative energy consumption originates from the constant power consumption
. Investigating only the impact of the trajectory indicates that joint 1 contributes the most to the total amount, while joints five and six require the least amount. In contrast, the load due to the motion results in decreased reliability of joint two and four, whereby joint four exhibits the lowest reliability as depicted in the bottom of
Figure 4. The high load on joint four results from a motion of
to change the orientation between
and
. In contrast to the motion of
between
and
of joint one, the fourth joint is subjected to gravitational loads. Thus, the corresponding load calculated by Equation (
8) yields a high strain as a result of the planned trajectory. Hence, based on the analysis of the trajectory, a characteristic distribution of consumed energy and reliability and corresponding critical joints can be determined, allowing one to examine measures to improve resource efficiency. Furthermore, estimating the reliability of each joint may provide a decision support for the selection of a feasible operation time, as well as the number and type of spare parts for a specific task and trajectory.
Based on the reliability of each joint, corrective maintenance is applied and the probabilities of required replacements of the modular joints are determined by a Monte Carlo simulation with 1 × 10
5 samples. Only considering events with a probability higher than 1% results in the three cases presented in
Table 4. With a probability of 81.6%, no repair is required during 36,000 h. Thus, corresponding costs and GHG emissions consist of the acquisition or manufacturing of the robot, as well as the total energy consumed. Evaluating costs and emissions with Equations (
13) and (
14) yields costs of 36,289 € and CO
2-eq. of 4237
. Furthermore, the Monte Carlo simulation yields probabilities of 3.4%, 10.8%, and 1.5% for the replacement of the joint modules
,
and
, respectively. Thus, one small joint module
is replaced with a probability of 12.3%, based on the sum of the probabilities of
and
. Correspondingly, costs and emissions increase by the values of the components based on
Table 2 and
Table 3.
Based on the considered inputs into the cost functions, the composition of LCC and GHG emissions can be analyzed. Accordingly, the corresponding distributions are partitioned into acquisition or manufacturing, energy consumption and spare parts. In conjunction with the probability of occurrence at the top,
Figure 5 presents the resulting composition of LCC in the middle and of GHG emissions in the bottom for each case. The cumulative costs consist of 92% acquisition costs or more for all cases. Costs originating from energy consumption and spare parts account for the remaining percentage depending on each case. In contrast, the energy consumption during the operation contributes 88% or more to the total GHG emissions, while the manufacturing of the robot and the spare parts share the remaining portion. In combination with comparably low probabilities for required replacements, the impact of required spare parts on LCC and GHG emissions is low. As estimated in
Table 2 and
Table 3, the economic and ecological effects of
are lower than for
, consequently, the corresponding impact on LCC and GHG emissions differs as well.
Based on the composition, minimizing the energy consumption may provide little reduction in the LCC, but may distinctly reduce the GHG emissions for the selected robot and task. However, additional costs or emissions, e.g., resulting from unplanned downtime, may shift the presented distribution. Furthermore, an increasing utilization of renewable energy may decrease the contribution of energy consumption to the GHG emissions.
3.3. Evaluation of the Impact of Payload and Cycle Time
In Ref. [
11], a parametric study indicated a distinct impact of the payload and the duration of a single point-to-point motion on energy consumption and expected service life. In the following, a similar study is performed for the selected task and is extended by an analysis of costs and environmental impact. For the parametric study, the weight of the workpiece
is varied from 0
to 4
in increments of
. Thereby, a workpiece with a weight of 4
in combination with the gripper yields the maximum allowed payload of the robot. For each resulting payload, the cycle time
is varied from 6
to 12
in increments of
. An overview of the varied parameters is given in
Table 5.
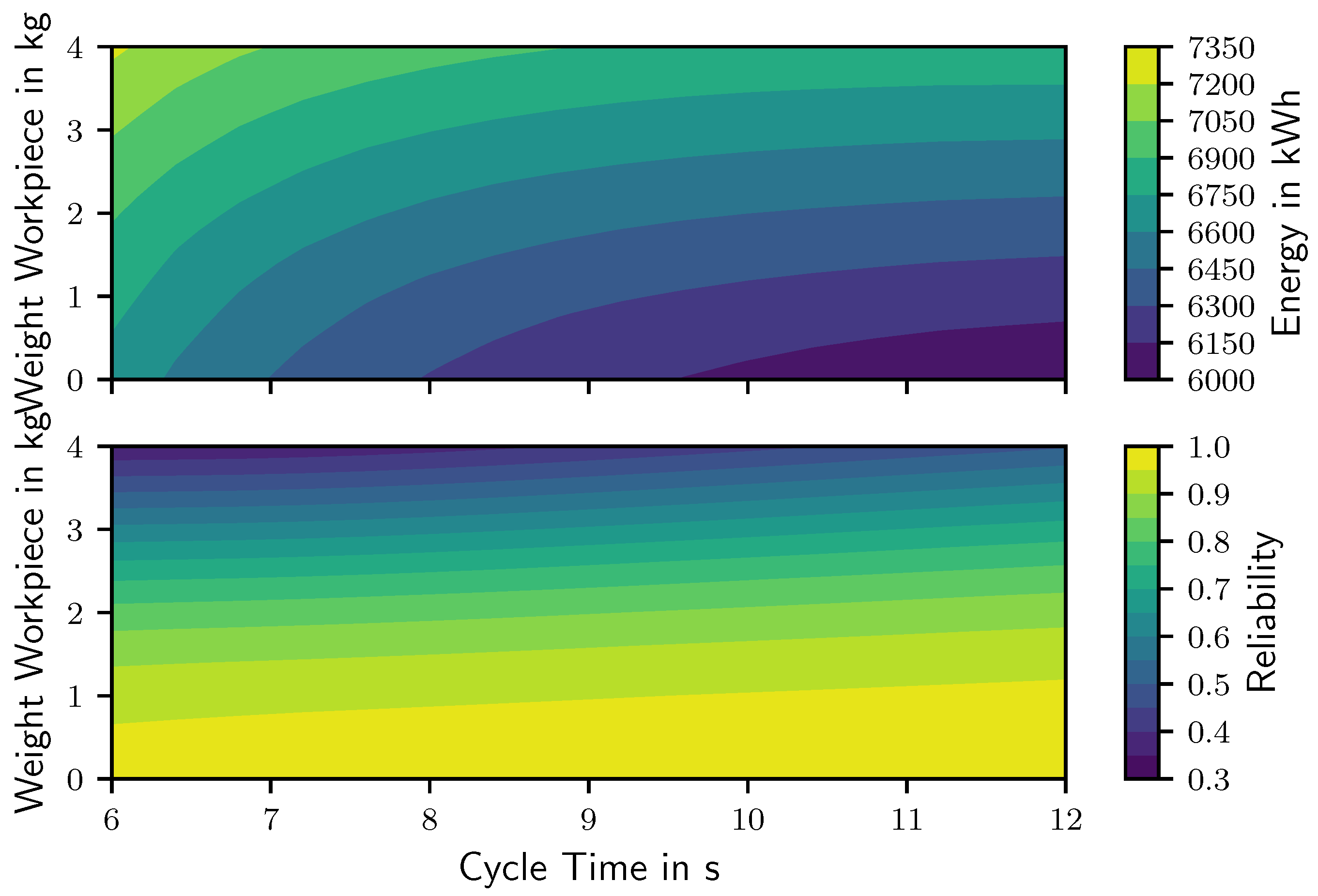
Evaluating each combination of workpiece weight and cycle time yields the impact on consumed energy and reliability presented in
Figure 6. During a fixed operating time, a higher payload and a quicker motion increase energy consumption and reduce the reliability. Furthermore, the impact of the duration on the consumed energy, especially for short cycle times, is more distinct than the impact of the weight of the workpiece. Overall, the parametric study indicates large variations depending on the weight of the workpiece and the duration of the motion. In addition, a low reliability of 0.3 for tasks with a high payload after 36,000 h of continuous operation may lead to unplanned production stops and may therefore not be reasonable.
For each task and trajectory in the parametric study, a Monte Carlo simulation is performed to determine the number of required replacements for each joint. As the path of the motion is not changed throughout the parametric study, it can be expected that the critical components are
and
, as discussed for the exemplary task examined in
Section 3.2. This is confirmed by the results of the Monte Carlo simulation presented in
Figure 7, displaying the probability of the number of required replacements during 36,000 h of continuous operation. Thereby,
Figure 7 contains excerpts of the parametric study for selected weights of the workpiece and cycle times. The task with a workpiece weight of 2
and duration of 6
is analyzed in
Section 3.2, and similarly to the results presented in
Table 4, three cases exist: no replacements are necessary with a probability of 81.6% (blue), while
and
are replaced once with a probability of 12.4% (orange) and 3.4% (green). For the tasks with a workpiece weight of 0
, events of required replacements occur with probabilities less than 1% (gray) for cycle times of 8
, 10
and 12
. In contrast, for high payloads, the probabilities and the number of relevant cases distinctly increase as a consequence of the low reliability, as already presented in
Figure 6. For a workpiece weight of 4
, the Monte Carlo simulation additionally yields events where a component is replaced more than one time or combinations of components have to be repaired.
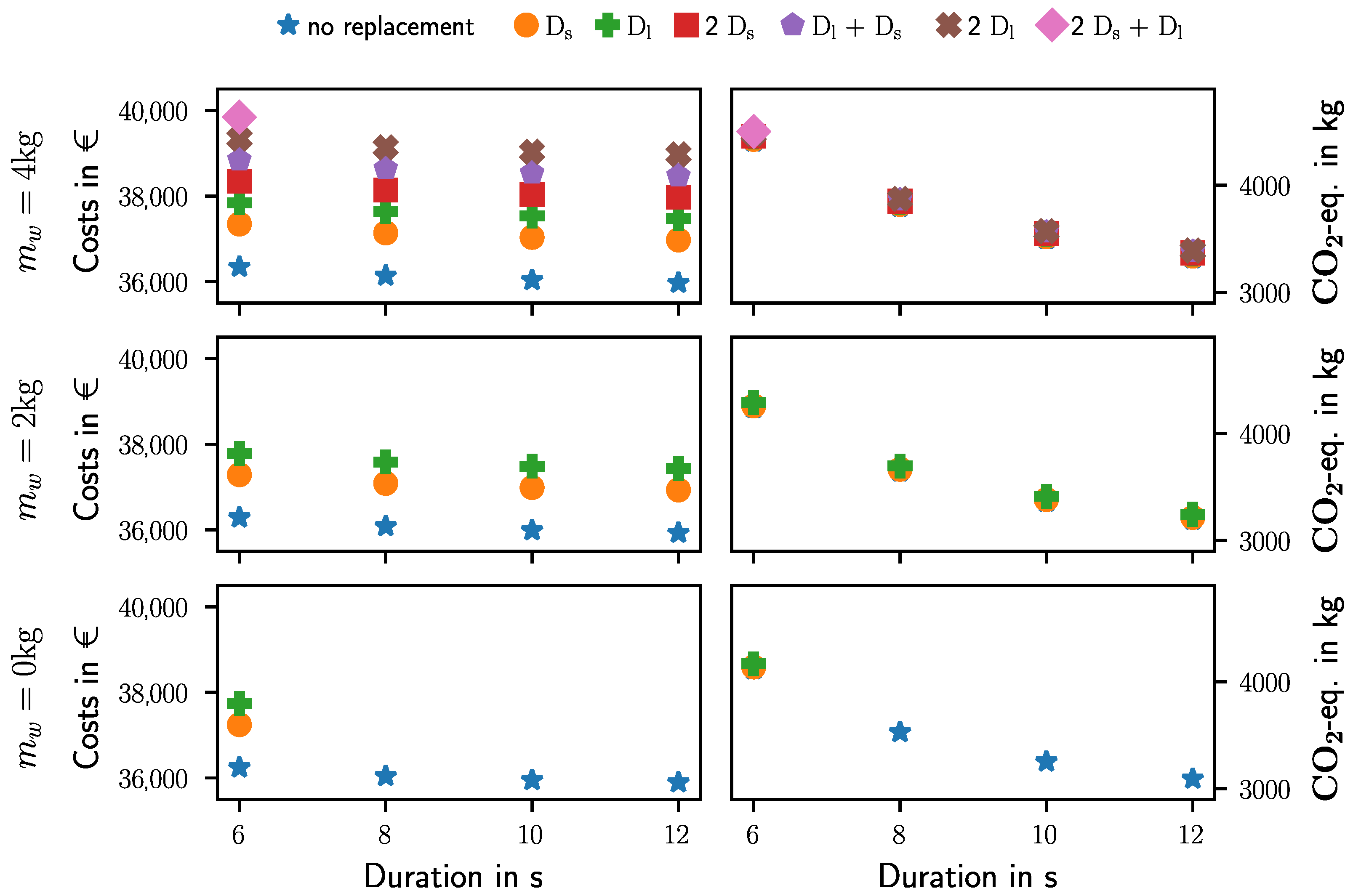
Combining the consumed energy with the results from the Monte Carlo simulation allows one to evaluate the impact of workpiece weight and cycle time on LCC and GHG emissions. Thereby, the respective costs and emissions are plotted in
Figure 8 for each relevant case of the Monte Carlo simulation depicted in in
Figure 6. Observing the LCC in the left of
Figure 8 displays a discrete increase in costs depending on the case and each component’s cost. While the acquisition costs of 35,000 € still account for the largest matter of expense, a high payload may distinctly increase the total costs depending on the number of replacements. The increase in costs depending on payload and cycle time for the same case, e.g., when no replacement is required, is comparably smaller and approximately proportional to the consumed energy. In contrast, short cycle time results in distinctly increased GHG emissions compared to the impact of different amounts of spare parts, as depicted in the right side of
Figure 8. This effect can be attributed to a rising energy consumption and its distinct impact on GHG emissions, as discussed for the exemplary task in
Section 3.2.
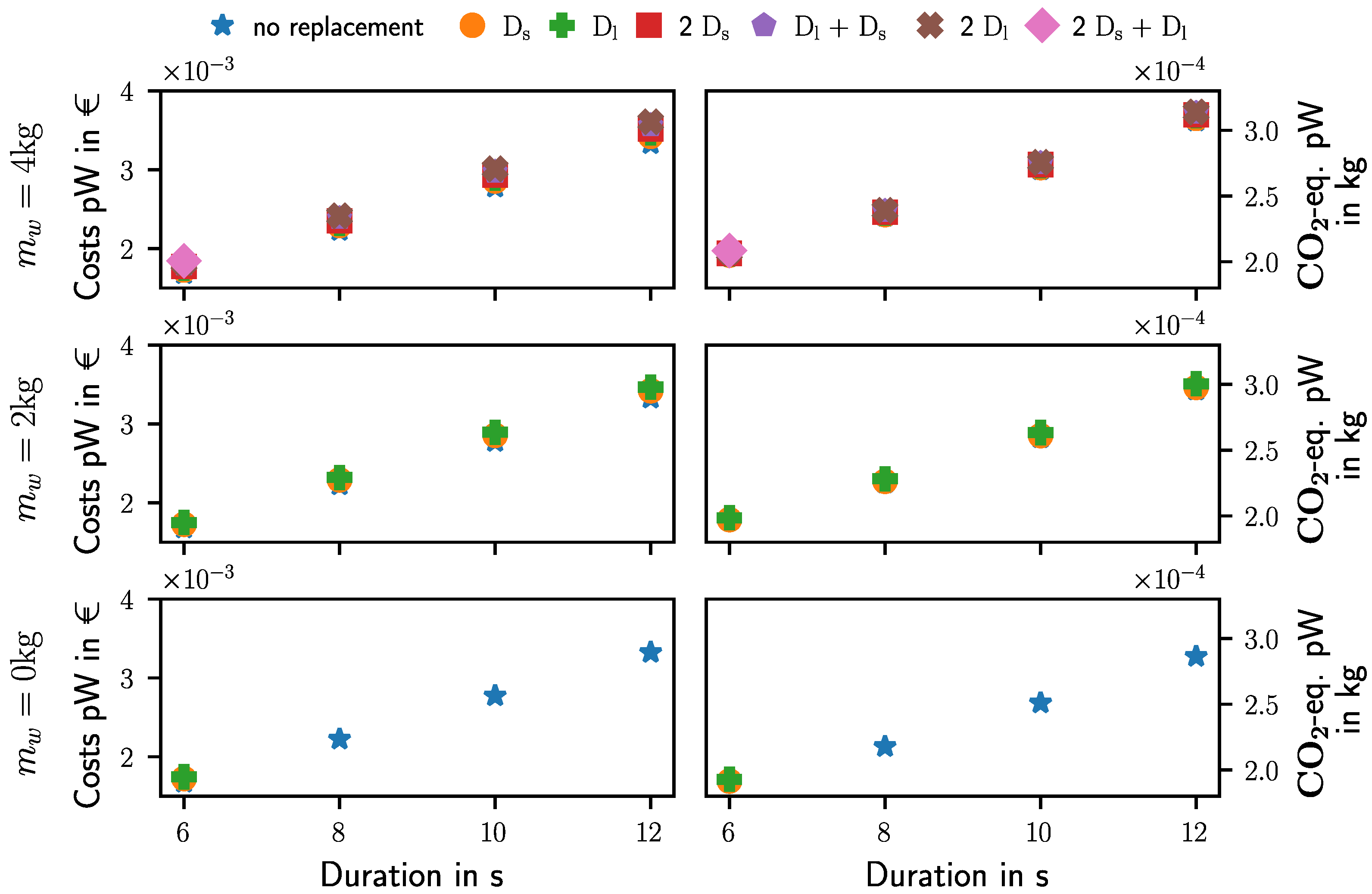
Based on the results presented above, increasing the cycle time would reduce costs and environmental impact. However, this would also lower the productivity of the robotic system. Thus, instead of cumulative costs and emissions, these quantities can be divided by the total amount of workpieces that are transported during 36,000 h of continuous operation. Accordingly,
Figure 9 presents the evaluated costs and GHG emissions per workpiece (pW). The costs per workpiece are below 0.005 €, while the emissions are below 3.2 × 10
−4 kg CO
2-eq. per workpiece for all tasks and cases. While the increased energy consumption and replacements for short cycle times and high payloads increase the cumulative costs and emissions,
Figure 9 displays a distinct dependency of costs and emissions per workpiece depending on the cycle time. Thus, the shortest cycle time yields the lowest LCC and GHG emissions per workpiece for all tasks and cases. However, this may be offset by reduced reliability for short cycle times and a resulting increased probability of unplanned production stops.
To summarize, analyzing energy consumption and reliability in combination with life cycle costing and LCA provides a decision support for the comparison of different systems, tasks or the selection of optimal parameters. Furthermore, the results may differ depending on the objective, as highlighted by the comparison of LCC and GHG emissions with the corresponding impact per workpiece. Nevertheless, it has to be noted that several assumptions and estimated parameters are required for the exemplary task and robot. While this should not affect the general application of the method, the input data need to be adapted for each individual application and results have to be analyzed accordingly. In addition, the impact of the disposal should be considered to complete the life cycle. For the selected task and the presented parametric study, the proposed method provides decision support for the determination of the optimal cycle time. While the weight of the workpiece is usually defined by the task and can not be changed easily, a low reliability for high payloads may, for example, be avoided by the selection of different via-points for the task, an adjusted trajectory or selecting an alternative robot. Correspondingly, various parameters can be adapted to improve the resource efficiency. However, for the application in a production scenario, parameters may be additionally constrained by the production process or depend on the integration with commercial industrial robots. Hence, based on the presented model-based method, variations of relevant decision variables can be generated and evaluated in simulation to assist in the planning stage of a production system.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








