1. Introduction
One of the outstanding problems in physics is to account for the apparent dark energy and dark matter in the universe since it accounts for roughly
of the total matter in the universe. Reviews of the dark matter and dark energy cosmological problem, and the models that have been introduced to account for it, include those of Peebles and Ratra [
1], Sahni [
2], Copeland, Sami, and Tsujikawa [
3], Frieman, Turner, and Huterer [
4], Amendola and Tsujikawa [
5], Li, Li, Wang, and Wang [
6], and Arun, Gudennavar, and Sivaram [
7]. We will not survey the literature here as these reviews do an excellent job of that. As is often the case, we use dimensions where the speed of light
c is 1; we use the Einstein summation convention where sums over repeated indices are assumed, and a comma in front of a lower index such as
denotes differentiation of
f with respect to
.
Maybe the most favored model is the
CDM model. Here,
is Einstein’s cosmological constant, giving rise to dark energy with
, and CDM is cold dark matter introduced to give the observed ratio of pressure to total mass density, which is about
. Constraints on dark matter and dark energy properties are imposed by the results of the DES collaboration [
8,
9]. Gravitational lensing measurements [
10] give a Hubble constant that is consistent with long-period Cepheid measurements in the large Magellanic cloud [
11], but both strongly indicate significant discrepancies with the
CDM model. Experimental tests of the strong equivalence principle [
12] provide further evidence casting doubt on the model in favor of modified gravity theories. Alternatively, there may be late time dark matter creation [
13].
The relativistic model we introduce here has no adjustable parameters and incorporates a torsion vector field. It is perhaps the simplest gravitational model involving torsion; yet, we believe it could explain the dark energy and dark mass in the universe. If the simplicity of the underlying equations is to be a guiding principle in physics, then these equations surely meet that principle. Of course, our equations still need to be compatible with both existing and future experimental observations, both qualitatively and quantitatively, and this remains to be seen. It is to be stressed that our equations govern the curvature of empty space and do not fully determine the interaction between matter and the curvature. We believe the simpler problem of obtaining the equations for empty space should be addressed first, as a stepping stone towards a more general theory where matter is included. The main demands that drive our formulation of the equations are:
That the new equations should be as simple as possible, involving as few assumptions as possible
That, correspondingly, the new equations should be linear constraints on the curvature tensor.
That, clearly, the number of unknowns in the torsion field and in the metric, modulo coordinate transformations, should be equal to the number of independent scalar constraints imposed by the new equations.
Any solution to Einstein’s equations is also a solution to the new equations.
It may be argued that these should not be assumed a priori, but that convincing physical arguments should be presented as well. On the other hand, Einstein’s equations for empty space can be obtained from the first three of these requirements without any necessity to introduce physical considerations. Indeed, as is well known, it is natural that the Ricci tensor (with the possible addition of the cosmological constant term) is zero in empty space as this provides 10 equations for the 10 metric elements, with the 4 functions associated with freedom in the choice of coordinates being compensated by the 4 Bianchi identities. Only when matter is present is physics needed to determine the full Einstein equations, as embodied in the constraints that the equations reduce to Newton’s gravitational equations when the spacetime curvature is small and that small test particles follow geodesics. Since we do not consider the full interaction of matter and curvature, we cannot claim that small test particles will still follow geodesics: that would be a natural demand to be required of a more general theory.
Despite the simplicity of our underlying equations the resultant dynamics of the torsion vector field, even in the weak field approximation, is enormously complicated, suggesting the torsion vector field has some sort of turbulent behavior. This is the main novel feature of our theory: the suggestion that torsion may induce intrinsic inhomogeneity on many length scales, even in the absence of matter. This goes further than the idea that space is inhomogeneous on the Planck length scale and is also a feature of anti-de Sitter spacetime [
14]. Other work shows that the inhomogeneities of matter in the universe may account for the perceived acceleration of the universe without any need to introduce a negative cosmological constant (
) (see [
15] and the references therein).
Numerical simulations of the torsion field behavior will almost certainly be necessary to test the theory and assess its compatibility with astronomical and cosmological observations. The equations can be reinterpreted as a model using the Einstein gravitational equations where spacetime has regions filled with a perfect fluid with negative energy (pressure) and positive mass density, other regions containing an anisotropic substance, which in the local rest frame (where the momentum is zero) has negative mass density and a uniaxial stress tensor, and possibly other “luminal” regions where there is no natural local “rest frame”. We emphasize, though, that all three regions are manifestations of the torsion vector field, and the three regions accordingly correspond to regions where the vector field points inside, outside, or on the boundary of the light cone. Our theory predicts that dark energy and dark matter (which are both manifestations of the torsion field) interact and exchange energy. Other models where dark energy and dark matter interact were reviewed by Wang, Abdalla, Atrio-Barandela, and Pavón [
16] (see also the more recent work of Borges and Wands [
17]).
It has been noted before by De Sabbata and Sivaram [
18] that torsion provides a natural framework for negative mass, as has been suggested to occur in the early universe. Cosmological models with negative mass have been studied by Ray, Khlopov, Ghosh, and Mukhopadhyay [
19] and by Famaey and McGaugh [
20] and yield promising explanations for the acceleration of the expansion rate of the universe.
In addition to the cosmological dark mass problem, there is also the dark mass problem, which is associated with the observations of higher-than-expected rotational velocities of stars far from the galactic center. One empirically motivated model that successfully accounts for this is Modified Newtonian Dynamics (MOND), first introduced by Milgrom [
21]. He suggested that Newton’s law, where the gravitational force is proportional to the acceleration, be replaced at low accelerations, below a critical acceleration
, by one where the force is proportional to the square of the acceleration; see
Figure 1. Later, this idea motivated a relativistic theory developed by Bekenstein [
22] and generalized by Skordis [
23]. One prediction of MOND, later verified, was that there should be a universal relation between the rotation speeds of stars in the outermost parts of a galaxy and the total mass, not dark mass, of the galaxy; see the book of Merritt [
24] for further discussion on this point. In particular, on the basis of this, it seems unlikely that unseen particles will provide the explanation for the galactic missing mass problem. Other reviews of MOND, including these and other relativistic extensions and their implications for cosmology, have been given by Famaey and McGaugh [
20], Merritt [
24], and Milgrom [
25]. It is not yet clear whether the torsion field model developed here will be successful in explaining the galactic dark mass problem, though the success of Farnes [
26] in explaining the flattening of rotation curves by introducing negative mass suggests that it might meet with success on this front.
Torsion is the antisymmetric part of the affine connection. The affine connection determines how vectors change under parallel displacements. Cartan introduced torsion and applied it to develop generalizations of Einstein’s gravitational equations. His work dates back to the early 1920s; see [
27] and the references therein (translated in [
28]). A brief introduction to torsion is in the classic book on gravitation by Misner, Thorne, and Wheeler [
29]. More extensive reviews of general relativistic models that include torsion, with further developments, include those of Hehl, von der Heyde, and Kerlick [
30], De Sabbata and Sivaram [
18], Hehl, McCrea, Mielke, and Ne’eman [
31], Shapiro [
32], Ortín [
33], Trautman [
34], Poplawski [
35], and Fabbri [
36]. Interestingly, Jose Beltrán Jiméneza, Lavinia Heisenberg, and Tomi S. Koivisto have recently shown [
37] that Einstein’s gravitational equations can be reformulated in terms of the torsion alone, eliminating the metric.
Typically, general relativistic models with torsion have been introduced to allow for the intrinsic spin of matter and are quite complicated. By contrast, our focus here is on developing a simple model that may account for the dark mass and dark energy in the universe.
Ivanov and Wellenzohn suggested that the Einstein–Cartan theory may account for dark energy [
38]. Another gravitational model that incorporates the same torsion vector field we use, as well as additional fields and a fifth dimension, was developed by Sengupta [
39], who suggests it may solve both the cosmological and galactic dark matter problem. Other models incorporating torsion, quite different from the one explored here, that may explain the accelerated expansion of the universe have been developed by Watanabe and Hayashi [
40], Minkevich [
41], de Berredo-Peixoto and de Freitas [
42], Belyaev, Thomas, and Shapiro [
43], and Vasak, Kirsch, and Struckmeier [
44].
The analysis in the following sections is more or less standard, though equivalent formulations are clearly possible according to one’s mathematical taste. The key step to arriving at our equations is simply to postulate that geodesics and autoparallels coincide. There is nothing difficult in the analysis leading to our equations governing the spacetime curvature.
3. Equating Geodesics with Autoparallels
Geodesics are trajectories
, which we chose to parametrize by the distance
s along them, that have an extremal distance between two points. Since they clearly only depend on the metric, they satisfy the standard formula:
Alternatively, we may consider an autoparallel constructed in such a way that successive elements arise from each other by parallel displacements. An element is the vector
, and under parallel displacement, its components transform as
The left-hand side is to be replaced by
, giving
We postulate that geodesics coincide with autoparallels, thus giving
or equivalently,
This postulate is fundamental to the theory. While it is absent of any physical justification, aside from removing possible ambiguity in the path that test particles are required to follow in a more general theory, it is essential to keep the governing equations as simple as possible. This is our motivation for this constraint.
As (13) holds for all
and
, we obtain
Multiplying both sides by
and summing over
gives
Combining this with (7) then yields
Therefore,
is antisymmetric with respect to the interchange of any pair of its three indices, and this implies (see, for example, the text below Equation (2.16) in [
30]) that
for some contravariant vector density
, where, as is standard,
is the Levi-Civita tensor density, with
and antisymmetric with respect to the interchange of any pair of indices.
is known as the axial part of the torsion [
30]. A parallel derivation of the complete antisymmetry of torsion is in the review of Fabbri [
36]. Combining (17) with (14) gives
5. The Proposed New Gravitational Equations
In this section, we investigate how torsion affects the geometry of empty space. For our purposes, it is to be observed that in the Einstein–Cartan–Sciama–Kibble theory, as reviewed in [
30,
33,
34], one has
where
is the spin axial-vector field, and so, there would be no torsion in empty space. Nevertheless, more general theories of torsion-gravity, in which torsion propagates, do not need to verify such a constraint, and therefore,
can still be nonzero even if
identically; see Fabbri [
36] and the references therein. Having emphasized that there exist theories in which torsion can still be nonzero, even in a vacuum, we will however not be specifying any particular Lagrangian. Instead, we will work from a very general perspective. The new gravitational field equations are
where the
are the elements of the symmetric stress–energy–momentum tensor
and
is the gravitational constant. This then has the equivalent form:
or
with
Thus,
is the equivalent stress–energy–momentum tensor if we were to reinterpret our equations in the format of Einstein’s original gravitational equation. Therefore, if the torsion field
is small enough, we recover Einstein’s original equations to a good approximation and, hence, those of Newtonian gravity. From here onwards, until the last section, we assume that
, i.e., that no ordinary matter is present in the region of spacetime being studied. By multiplying (32) by
and summing over indices, we see that
, and hence, (33) can be rewritten as
or, raising indices,
These equations are consistent, for example, with those of Sengupta [
39] (see his Equation (
27)), which, however, are not the same as they include an extra dimension and incorporate additional fields.
The well-known Bianchi identities between the components of the contracted curvature tensor imply
and as is well known, this implies
, reflecting conservation of energy and momentum. Together with (37) and (30), we obtain
We can view these as the extra four equations needed to determine the four components of in empty space. One slightly unsatisfactory feature of the equations is that is only determined up to a sign change. In other words, given a solution in a spacetime region, another solution can be obtained by reversing the sign of within a subregion. Thus, we do not consider our theory to be complete. At the quantum Planck length scale, it likely needs modification, and the modified theory could prevent abrupt changes in the sign of . Alternatively, one could take the view that there is no torsion, but rather, is just a vector field pervading all space. Then, the sign of is immaterial, but still, one would expect modifications at the Planck length scale to provide a lower limit to the length scales of “turbulence” in the vector field .
8. Some Solutions and Perturbative Solutions for the Torsion Field in the Weak Field Approximation
Let us consider solutions of
in a flat metric given by (40). Using (49), we obtain
where the first equation represents the conservation of energy and the second the balance of forces.
In the subluminal regions, if we look for solutions where
globally and not just at one point, the conservation of energy implies
, while the balance of forces implies
. Thus,
must be a constant in spacetime. On the other hand, if we allow for small values of
, with
, then to first order in the perturbation with
and
, we obtain
giving
This has exponentially growing solutions such as
where
is a small parameter. After a finite time, this solution for
f reaches negative values, but before which, our assumption that
is violated. Thus, the solution with
is unstable to perturbations.
In the superluminal regions, if we look for solutions where
globally and not just at one point, then the conservation of energy implies that
must not vary with time, and the balance of forces implies
This provides three equations to be satisfied by the three functions
,
. There is a manifold of functions satisfying (61), and we can choose any trajectory
that lies on this manifold and is such that
is independent of time. Unless
only depends on
t, it seems likely that this second condition will generally force
to be independent of time (up to a sign change in
). If we investigate the effect of perturbations, with
and both
and
depending only on
and
t and say
, we obtain
where
and
. This gives
which has exponentially growing solutions such as
While, after a finite time, our assumption that becomes violated, the calculation shows that the solution with is unstable to perturbations.
In luminal regions where
, we can use this identity to eliminate
from (57) and obtain
where the plus or minus sign is taken according to whether
. In the special case where
(after making a spatial rotation if necessary), we obtain
(or
), and (65) reduces to the single equation:
to be satisfied by the function
, describing a wave propagating at the speed of light in the direction of the
-axis. We call them localized longitudinal torsion waves, longitudinal because
is aligned with the direction of propagation. We now look for perturbation solutions with
, where
is a small parameter and both
and
depend only on
and
t while
. Letting
and
, we obtain
The first wave equation has the solution
, where
is an arbitrary function, and substituting in the second gives
, where
is the derivative of
. We conclude that
where
satisfies
for all
y, to ensure that
d is non-negative and that the perturbation is small (
for all
, but otherwise is an arbitrary function. Thus,
can only take negative values, and the perturbation travels at the speed of light in the direction of
.
We now present various other solutions of the equations, without investigating their stability.
8.1. Plane Wave Solutions
Here, we consider plane wave solutions to the equations in the weak field approximation. It is to be emphasized that since the equations are non-linear, specifically quadratic in , one cannot generally superimpose our plane wave solutions to obtain another solution.
The simplest case is when the fields only depend on, say,
. Then, we deduce that
is a constant, i.e.,
where the
are constants. Multiplying the first equation by
, we obtain
which requires the constants
to be such that the right-hand side is non-negative. Thus,
is constant, and the last three equations in (69) imply that
,
, and
are constants as well, unless
. Therefore, the only interesting case is when
, implying that
. Then, according to whether
is positive, zero, or negative, the solution will be subluminal, superluminal, or luminal. Thus, subject to the constraint that
(relevant only when
),
and
can be chosen arbitrarily and determine
. In particular, if
, one may choose
and
to be zero outside an interval of values of
. In a frame of reference moving with velocity
in direction
, this will look like a wave pulse traveling a velocity
, as all the field components will be functions of
. We call them localized transverse torsion waves, transverse because
is perpendicular to the wave front. Unlike longitudinal torsion waves, which can only travel at the speed of light, these can have any velocity less than
c.
Similarly, when the fields only depend on
, we deduce that
is a constant, i.e.,
in which
and
and where
and
are constants. Multiplying the last formula by
shows that
is constant, implying
is constant and, through the first equation in (71), that
,
, and
are constant as well, unless
. When
, then
. The last formula in (71) then forces
to be constant. Subject to this constraint,
can have an arbitrary dependence on time (with
being independent of
,
, and
). However, note that the inevitable spatial variation of
may eliminate this arbitrariness, as may going beyond the weak field approximation.
8.2. Solutions with Cylindrical Symmetry, Including Torsion-Rolls
Consider cylindrical coordinates
taking
r to be the radial distance from the
z-axis,
to be the angular variable, and
t to be the time. We seek solutions where
and
only depend on
r, so that
where we used the standard formulas for the gradient, divergence, and
in cylindrical coordinates. Then, the conservation laws (57) take the form
If we consider an interface at a constant radius
, with outwards unit normal
, then the weak form of the equations
imply the jump conditions on the elements
that
must be continuous across the interface, where
is given by (49). This implies that the quantities
must all be continuous across the interface
. Multiplying the last equation by
, we see that
must be continuous as well, and the first three equations imply that all components of
are continuous across the interface, up to a change of sign, unless
at the interface. If
is zero at the interface, it follows that
at the interface. Therefore, across
, any jumps in
,
, and
that maintain the continuity of
are possible provided
is continuous and
.
The first, third, and last equations in (74) imply
where
,
, and
are constants. In the case
, all are satisfied with
. The remaining second equation in (74) becomes
Thus, there is only one constraint among the three functions , , and . We see that must monotonically increase with r, in a manner controlled by , and if it tends to zero at infinity, then must be negative for all r, corresponding to a subluminal region. If and vanish outside a certain radius, then we call this solution a torsion-roll. Physically, the pressure increases to larger negative values as the radius decreases, and its gradient provides the centripetal force that holds the “fluid” circulating around the z-axis with a velocity governed by . In a moving frame of reference, which is not moving in the z-direction, the torsion-roll will appear to be moving.
Of course, if is constant and positive outside a certain radius (corresponding, for example, to a superluminal region where, say, is constant and ), then can remain positive for all r, or can transition from positive to negative values at a particular radius. This example demonstrates that transitions between subluminal and superluminal regions are possible.
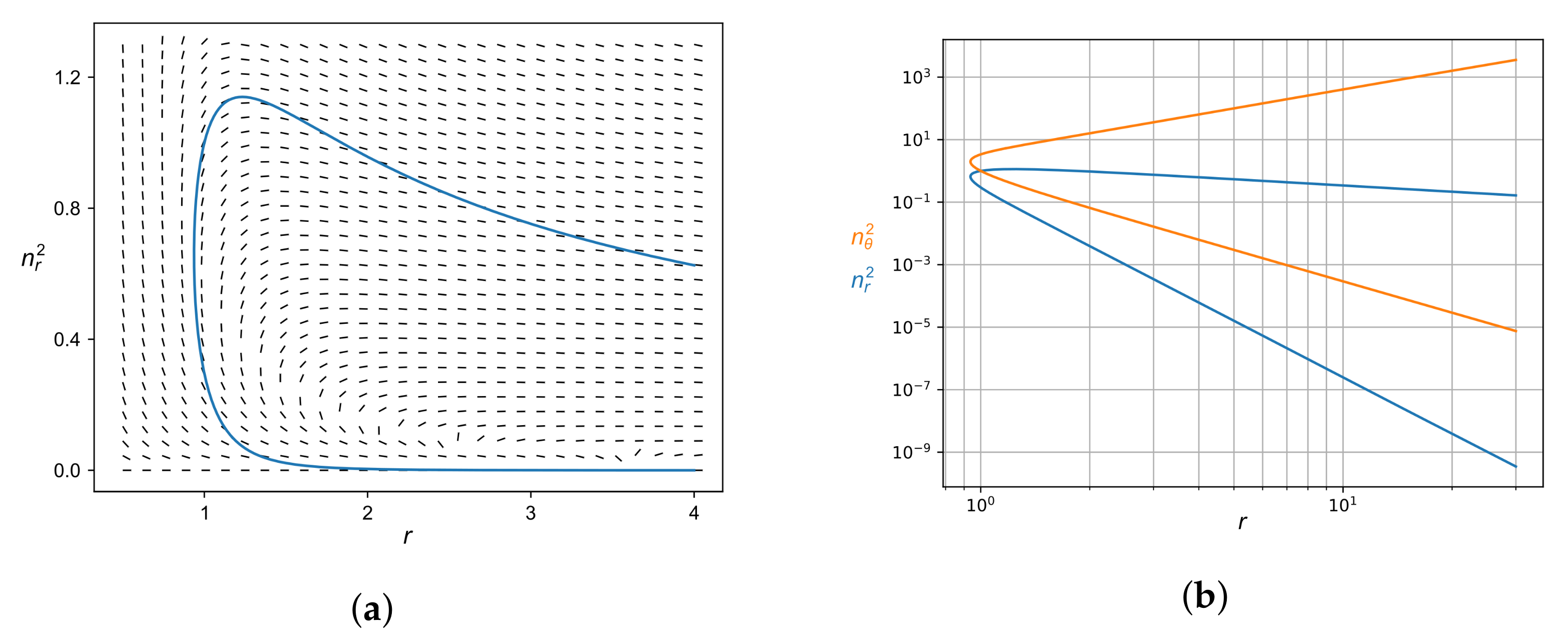
Alternatively, if
is nonzero, then (77) implies
Substituting these in the second equation in (74) yields
This gives us a flow-field in the
phase plane. Note that (80) remains invariant under the transformation
Thus, without loss of generality, we may, by rescaling any solution, take
to be 0 or 1 and
k to be
, 0, or 1. If
, then there is essentially just one solution:
satisfying
with all other solutions (with
) taking the form
, parametrized by
. The solutions for
and
are shown in
Figure 2 along with the flow field. One can see that the solution does not exist below a critical value of
r, which looks unsatisfactory. This critical radius is associated with the vanishing of the denominator in (80).
To obtain satisfactory solutions that exist for all
, one may take
and
to avoid the denominator in (80) vanishing, except at
. Then, (80) reduces to
There is again essentially just one solution:
satisfying
with all other solutions (with
) taking the form
, parametrized by
. The solution is graphed in
Figure 3. There is a singularity at
, and while
goes rapidly to zero as
,
and
(unless it is zero) diverge to
∞ as
. This solution is satisfactory once one takes into account that the weak field approximation is not valid near the singularity at
, nor as
, and one should use the full equations (37) there. For this example with
and
, it is interesting that there is a transition from a superluminal region inside to a subluminal region outside according to the sign of
which is also plotted in
Figure 3.
9. Extension of the Schwarzschild Solutions with Spherical Symmetry
Here, we generalize Schwarzschild’s solution for a spherically symmetric metric solving Einstein’s equations in the absence of matter. The important point is that in appropriate limits, some of the solutions here approach the Schwarzschild solution. Consequently, existing experimental results of black holes do not invalidate our theory, but rather place constraints on the magnitude of the torsion field. This magnitude should be tied to the radius of the universe, and, hence, to the critical acceleration in MOND. Thus, experiments in the near vicinity of a star or black hole would not typically reveal the difference with Schwarzschild’s solution. We have not explored the situation regarding rotating black holes.
As shown by Schwarzschild, the metric in “polar” coordinates spherically symmetric about the origin must be of the form
in which
a and
b are functions of
r and
t. Here, we look for solutions where they are functions of
r only. Setting
,
,
,
allows us to use (84) to identify the coefficients:
From (36), we obtain the ten equations:
where the terms not involving
can be identified with the standard formulas for the elements
that are zero when
. Here, differentiation with respect to
is denoted by the prime, with the double prime denoting the second derivative. The second and third equations and the last equation force
, which is not surprising considering the symmetry of the problem. Two possibilities remain: either
or
. The first case corresponds to a subluminal solution and the second to a superluminal solution.
Let us consider first the case where
. Multiplying the second last equation in (86) by
and adding it to the first gives
The second equation in (86) implies
Adding and subtracting these equations gives
Multiplying the last by
, differentiating it, and using the result to eliminate
from the first equation in (86) yield
This has the solution
where
is a constant. Furthermore, by replacing
q with
, one obtains
This implies that
is a constant that we call
, giving
Substituting this back in the second equation in (89) gives the linear first-order differential equation:
Multiplying both sides by the integrating factor of
gives
Integrating both sides and recalling (93), we obtain
where
m is a constant of integration. In particular, with
, this becomes
which in the limit
reduces to the familiar Schwarzschild solution:
which becomes Euclidean at large
r. Once we allow nonzero
, the space is no longer Euclidean at large
r, but it still has a black hole at the center, with
a diverging when
and at
, the latter corresponding to the closed universe studied in the next section.
Now, consider the second possibility that
. Again, multiplying the second last equation in (86) by
and adding it to the first give
Furthermore, the second equation in (86) implies
Adding and subtracting these equations give
Multiplying the last by
, differentiating it, and using the result to eliminate
from the first equation in (86) yield
The equations (101) and (102) appear to have no simple analytic solution. One may eliminate
from the two equations that do not involve
to obtain
and from a solution
, (102) easily gives
. Alternatively, one may eliminate
from these equations to obtain
where
, and given a solution
, the first equation in (101) yields
. In either case,
is found by integrating the last equation in (101). Note that if
is a solution, then so will be
for any constant
, i.e.,
is only determined up to a multiplicative constant. This reflects the fact that we are free to rescale the time coordinate, replacing
t by
in (84).
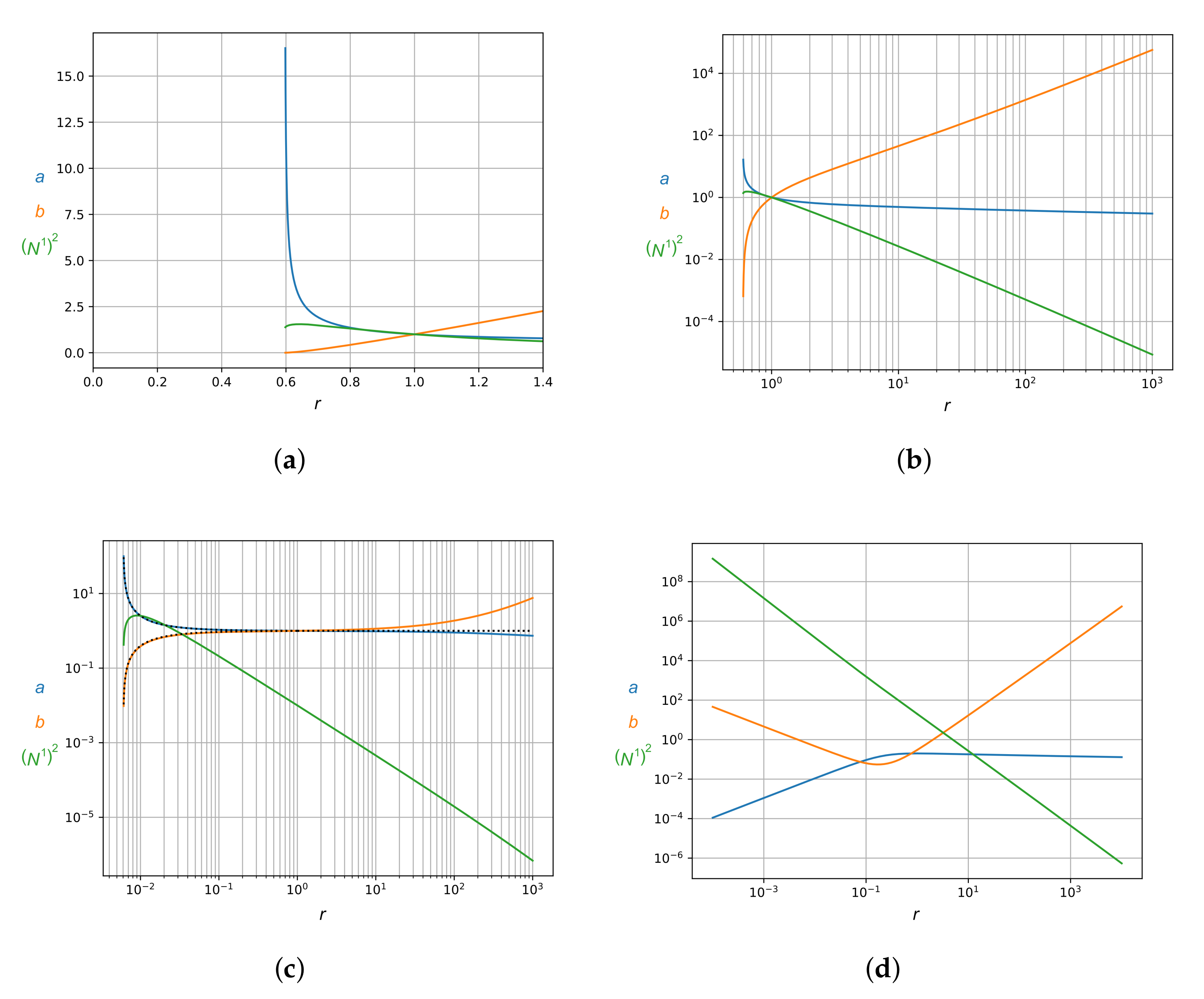
Rather than dealing with these second-order equations for
and
, one can numerically solve (101) and (102) directly.
Figure 4 shows some typical solutions, excluding unphysical examples where, say,
or
remain negative for all
r.
11. Addressing the Dark Matter and Dark Energy Problem
The result of the previous section giving an expansion rate
independent of time agrees with the well-known result that
for a model with
. However, this is based on the premise that spacetime is homogeneous. The expansion of the universe appears to be accelerating with measurements indicating
[
8], and this could be a consequence of our theory, as we now explain.
Dark matter itself is known to be inhomogeneous; see, for example, [
45] and the references therein. Spacetime is also inhomogeneous in our model. As the analysis at the beginning of
Section 8 shows, if there is a small fluctuation in the torsion vector field in subluminal or superluminal regions of spacetime, then that perturbation will grow. Moreover, ordinary gravitational effects might add to the inhomogeneity: if there is a higher equivalent mass density in two different regions, then there could be gravitational attraction between these regions, leading to accretion. At the same time, “collisions” between accreting regions should tend to disperse the torsion vector field density. Thus, there will be a certain amount of equivalent kinetic energy associated with the torsion field accounting for some additional “dark energy”. More importantly, there could be substructures in the torsion field containing differing ratios of “dark energy” to “dark mass”. The structures could collide and give rise to different structures. In particular, there might be “negative mass structures”, by which we mean structures in the torsion vector field incorporating superluminal regions. Accounting for these effects should reduce the total mass density, providing a higher
ratio, which may be consistent with the experimental value of
.
It is to be emphasized that both our full equations (37) and their weak field approximations (46), (47), and (57) have no intrinsic length scale. There is a length scale associated with the overall density of the torsion vector field (connected with the mass density of the apparent dark matter and dark energy in our theory), but this is of the order of the radius of the universe. It seems likely that the torsion vector field could be quite turbulent with structures on many length scales, down to some lower cutoff length scale where the current theory breaks down. This cutoff could be the Planck length scale.
To provide quantitative predictions, one needs a better idea of the behavior of the torsion vector field within spacetime, and this will almost certainly require sophisticated numerical simulations to obtain an approximation to the “macroscopic equation of state”. Simulations are needed to provide a better understanding of torsion fluid behavior in intergalactic and interstellar regions, as well as around stars, globular clusters, galaxies, and galaxy clusters. These may require the introduction of some parameter that provides a lower length scale to the “turbulence” in the torsion vector field, which ultimately could be taken to be very small. Simulating the dynamics of the torsion vector field over the continuum of length scales may also require a sort of numerical renormalization group approach. While we have not investigated the stability of the torsion waves and torsion-rolls, it is not important that they are stable, even in the weak field approximation. The purpose of our exact solutions in the weak field approximation was mainly to illustrate the rich dynamics of the torsion vector field, to give some insight into possible dynamics and to show that one can have transitions between subluminal and superluminal regions, as noted at the end of
Section 8.2.
Regarding the question as to whether our model can account for the galactic dark mass problem, an encouraging sign is the apparent cosmological connection between the critical acceleration
in MOND, the radius of the universe, and the density of dark matter or energy in the universe, as reviewed in [
46]. Thus, the density of dark matter or energy, roughly
, which in our theory is related to the strength of the torsion field
, has an associated length scale
meters (approximately the radius of the universe), which agrees with the length scale
meters associated with the critical acceleration
in MOND.
12. Discussion
The theory presented here is largely aimed at providing equations governing the behavior of spacetime and the torsion field in regions devoid of matter. An initial test of the theory would entail numerical simulations of the torsion field in the weak field approximation with ordinary gravitational effects neglected, as governed by Equation (57), and allowing for field fluctuations. These fluctuations in the torsion field should be truncated at a small length scale, perhaps at the Planck length scale. This should give an approximation to the effective equation of state. The next step would be to determine the evolution of a homogeneous closed universe with this equation of state. Then, perturbations could be introduced and the evolution studied. For the theory to be viable, without modification, the results need to be consistent with cosmological observations.
Beyond the need for a lower cutoff, the equations are still incomplete. As remarked already, one can change the sign of in any region and still satisfy the equations, indicating that there is a deeper theory that prevents such discontinuous solutions for . Perhaps this also enters at the Planck length scale, and both it and the truncation of fluctuations in the torsion field are accounted for by appropriate quantum equations. Assuming there is only weak coupling between the torsion fluid with matter, aside from the coupling due to gravitation (spacetime curvature), then one might think there is conservation of momentum and energy both for the stress–energy–momentum tensor of the torsion vector field and for the stress–energy–momentum tensor of matter. On the other hand, if one regards the conservation of momentum and energy as a consequence of the Bianchi identities, then there appears to be no reason why they should be separately conserved. For this reason, our current theory, while it describes the curvature of spacetime and the accompanying torsion vector field in regions devoid of matter, is incomplete in regions containing matter.
One appealing feature of Cartan’s equations, and which is absent in our current theory, is that they allow for the incorporation of intrinsic spin—something that was discovered in 1925–1926 after Cartan first arrived at his remarkable equations. Cartan was originally motivated by the work of the Cosserat brothers [
47], who, like his equations, allowed for a non-symmetric stress field. His focus was on deriving equations where the source (matter) field automatically satisfied energy and momentum conservation. Sciama [
48] and Kibble [
49] independently developed the same generalization of Cartan’s theory, known as
or the Einstein–Cartan–Sciama–Kibble theory. Their theory and the original Cartan theory imply that the torsion field is zero in empty space and, so, reduce to the Einstein equations when matter is not present. An advantage of these theories, not yet incorporated in our theory as there is no coupling with matter, is that they account for the conservation of angular momentum [
30].
As others have also realized, departing from Cartan’s approach has the potential for explaining dark energy and dark matter as manifestations of a revised gravitational theory. Our theory is perhaps the simplest theory with that potential. As stressed already, conservation of energy and momentum still hold provided one reinterprets the equations as Einstein’s equation with an energy–momentum–stress tensor associated with “empty space”, i.e., associated with the torsion field. It could be that more complicated equations involving torsion will provide the final answer (and, as observed in the introduction, many candidates, besides Cartan’s and those of Sciama and Kibble, have been proposed, and undoubtedly, others will be put forward in the future). In that case, it could be that the ultimate theory only slightly perturbs the results in our theory in the intergalactic and interstellar regions, yet provides some lower limit to the likely “turbulence” in the torsion field. Thus, if successful, the theory proposed here may provide a guide in the search for the ultimate theory. It may be that the most important “take home” message of this paper is highlighting the importance of considering torsion theories that allow for dynamics in empty space on multiple length scales of the torsion field (and hence, of the accompanying metric). Interestingly, even in the absence of any torsion, anti-de Sitter space has a weakly turbulent instability [
14].
If warranted by experimental observations, a natural modification of our theory would be to add a term involving Einstein’s cosmological constant . However, it would be far more satisfying if this was not needed.



{kind=link}
{kind=link}
{kind=link}
{kind=link}



