1. Introduction
Gauge theories defined on spacetime regions with a boundary can have degrees of freedom and observables localized on the boundary. One can study them following one of (at least) two approaches to Hamiltonian formalism: covariant and canonical methods. It is a reasonable expectation that, at the classical level, these two descriptions should be equivalent. There are several papers that have dealt with this issue (see for instance [
1,
2]), where the claim is made that both methods are equivalent. This question is of great importance and should also be considered when there are boundaries present, since the derived Hamiltonian descriptions may result in inequivalent physical predictions. The purpose of this manuscript is to revisit this issue, for simple cases of (first-order) gauge theories defined over regions with boundaries, where both covariant and canonical methods are well understood. As we shall see, there are nontrivial examples for which such assumed equivalence is at odds with previously found results. Thus, we shall point out some such instances, in the hope that more thorough investigations shall fully clarify the issues at hand.
The first question one might ask is how the two descriptions, and in particular the symplectic structure (fundamental for the definition of dynamics), can be equivalent when the corresponding phase spaces are
different objects. To be precise, in the canonical approach, the phase space
is given by initial data on a hypersurface
, and the (so called kinematical) symplectic structure is the ‘canonical’ structure on the cotangent bundle over the configuration space (more below). On the other hand, the covariant Hamiltonian formalism is based on the covariant phase space
defined as the space of solutions to the equations of motion. Are there instances where a diffeomorphism between these two spaces can be defined? The answer is in the affirmative for some systems. Consider, for instance, a scalar field satisfying a linear equation of motion on an arbitrary, globally hyperbolic spacetime. If the corresponding fields are appropriately well behaved, one might have the existence and uniqueness of solutions to the equations of motion, given initial data. In that case, one can define a mapping
. It is invertible, so we can define all kinds of 1-1 mappings between objects, such as the symplectic structure, defined on both spaces [
3].
When we consider Hamiltonian gauge theories, namely singular systems with so-called first-class constraints (FCC), then one immediately runs into problems. The first issue is that a bijection is lost. Given a solution to the covariant equations of motion, one can induce initial data on (a preferred) hypersurface , which satisfies the constraints of canonical theory. If we now evolve these initial data, there will not be a unique solution, precisely due to the freedom of adding arbitrary linear combinations of the constraints to the Hamiltonian. Thus, we cannot define a 1-1 map between and the constraint surface . All this should be such that, when one quotients out the gauge orbits and arrives at the corresponding reduced phase space for each approach, then there is complete equivalence between them. That is, at the level of reduced phase spaces, one expects them to be fully equivalent. The problem is that, in practice, it is very difficult to work in the reduced phase space (one may not even have control over it, in generic cases). So, the best one can do is to obtain, at the level of pre-symplectic spaces, similar expressions for the pre-symplectic structures. This is precisely the issue that we shall examine here. It is, of course, important to be clear about what one is comparing, so we shall further make precise what we mean by equivalence below.
We present some preliminaries regarding both formalisms in
Section 2, and we state precisely the notion of equivalence that we shall consider. Next, we explore in detail several simple gauge theories, in regions with boundaries. In
Section 3, we start with one of the better known gauge theories in four dimensions, corresponding to the Maxwell field. Here, it is well known that, given the linearity of the theory, both canonical and covariant descriptions are equivalent (see for instance [
4] for such an analysis). We shall provide a brief review of such a theory. The next system we shall consider is a topological theory, namely
Pontryagin in the bulk. In
Section 4, we shall analyze both covariant and canonical approaches and show how different the descriptions are. At the end of the day, of course, we arrive at a description that is ‘trivial’, with no local physical degrees of freedom. The next system we will consider, in
Section 5, is a
Chern–Simons theory on the boundary (related to the Pontryagin theory). It is known that, at the level of action, both theories are equivalent. It has also been shown that, when considering the canonical phase space, there is also equivalence in a precise sense [
5]. In
Section 6, we shall analyze the Maxwell–Pontryagin using both approaches. Here, we see that they are not equivalent in the sense we shall describe below. To be specific, the two structures, at the pre-symplectic level, differ by a boundary term. Finally, in
Section 7, we consider Maxwell in the bulk with the Chern–Simons term on the boundary. We see, in this case, that the pre-symplectic structures are also equivalent.
Throughout this manuscript, we are considering generic globally-hyperbolic spacetimes without any specific choice of metric, nor a coordinate system. Furthermore, we employ the language of forms, since that simplifies the calculations and allows for shorter expressions. When needed, we have rewritten previously known results to match this notation.
It is a pleasure to dedicate this contribution to Prof. Ashtekar, who has been a pioneer in the application of both canonical [
6,
7,
8,
9] and covariant approaches [
10,
11] to general relativity. His insights have always been a motivation for the gravitational physics community. We can only hope that this contribution shall add to our collective understanding of the relation between canonical and covariant Hamiltonian methods.
2. Preliminaries on Covariant and Canonical Hamiltonian Analysis
In this section, we will give a very short reminder of the basic ideas of both approaches, based mostly on [
1,
10,
12,
13] for the covariant case, and [
14,
15,
16,
17,
18] for the canonical one, among many others. For simplicity and concreteness, here, we shall consider first-order gauge theories, whose configuration space is formed from
connection 1-form
given on a spacetime region
with boundary,
, where
are two (arbitrary) Cauchy surfaces and
is a time-like hypersurface. The connections should satisfy certain appropriate boundary conditions that can be either given a priori, from some (physical) considerations, or can be obtained in the process of constructing a consistent theory, or the combination of both. Here, we want to compare the two approaches, the covariant and the canonical. Let us first recall both formalisms.
The covariant phase space consists of , the space of solutions to the equations of motion, which satisfy some appropriate boundary conditions, together with a pre-symplectic structure , which is a degenerate, closed 2-form of . The degenerate directions are such that for every . This degeneracy signals the existence of gauge orbits in , that relate physically equivalent states. The space of such orbits , corresponding to different physical states, is the so-called reduced phase space, where the projection under the quotient map is non-degenerate.
On the other hand, the canonical phase space is the space of all allowed initial data equipped with a non-degenerate, closed 2-form , the kinematical symplectic structure. In gauge theories, there are first-class constraints and when we restrict to the constraint surface, the pullback of the symplectic structure becomes degenerate. Then, in principle, one could solve the constraints and impose some gauge fixing conditions (if possible), in order to obtain a reduced phase space with a non-degenerate symplectic structure .
In both cases, the starting point is a covariant action. In the covariant analysis, we find the geometric structures and arrive at a symplectic description in a natural way, without the need to foliate the underlying spacetime region, nor project the fields onto some hypersurfaces. In the canonical case, one has to perform a decomposition of the spacetime region, of the fields and of the covariant action, to arrive at a canonical one. Since has a boundary, both symplectic structures can have a boundary contribution, but, as it turns out, they do not necessarily coincide. In the following, we shall recall both constructions.
2.1. Covariant Hamiltonian Analysis
Let us start from a generic, first-order covariant action, without boundary terms:
Its variation can be written as
The second term of the RHS is obtained after integration by parts. If it vanishes, we obtain the Euler–Lagrange equations of motion,
, in the bulk. Though its vanishing is a condition needed for a well defined action principle, this term, called the symplectic potential, is also a starting point for the construction of a symplectic structure for the theory. Using Stokes’ theorem, this can be written as
The exterior derivative of the symplectic potential, acting on tangent vectors
and
at a point
is given by
where
denotes the exterior derivative in the phase space, and where one identifies variations of the fields with tangent vectors to the space
. From this expression, we can define a space-time 3-form, the symplectic current
, as
On the space of solutions,
, therefore, we obtain
In some examples, the boundary conditions ensures that the integral
vanishes, in that case it follows that
is independent of the Cauchy surface. This allows us to define a
conserved pre-symplectic form over an arbitrary space-like Cauchy surface
,
In this case, there is no boundary contribution in .
The boundary term appears when
on
. Then,
, and the conserved pre-symplectic structure takes the form
In the following, we shall revise various examples of the theories where the covariant action has an additional topological term. Let us recall why this term does not affect the covariant symplectic structure. In this case, we have
Using the equation of motion, we obtain
and the symplectic potential now has an additional term:
From (
11), it follows that the corresponding symplectic current is of the form
Now, we see that the term
vanishes due to antisymmetry. Therefore, when we add a topological term to the original action, this will not change the symplectic current nor, as a consequence, the symplectic structure of the original theory [
13].
In the covariant phase space framework, the energy of the system,
H is determined (up to an additive constant) from
where
, and
.
It is interesting that, in diffeomorphism invariant theories, such as the theory of gravity in first-order fomalism,
. It turns out that in the asymptotic region (for asymptotically flat configurations) and on the (weakly) isolated horizon, as an internal boundary,
reduces to an integral over a 2D surface
, while
vanishes. As a consequence,
H is determined as an integral over a 2D surface
; see, for example, [
11].
2.2. Canonical Hamiltonian Analysis
In this section, we shall briefly recall the procedure to arrive at the canonical phase space
. The starting point is again a covariant action (
1) or (
9), with spacetime region
of the form
, with
being a closed interval. The 3+1 decomposition of the action, through a spacetime foliation and a choice of time evolution vector field, amounts to a field redefinition or change in variables in configuration space, which allows writing the action in canonical form:
where
is the (candidate for) canonical Hamiltonian of the theory (that can also have a boundary term) and
is the kinetic term, which can also have a contribution from the boundary [
18],
Here, are the bulk canonical variables and are interpreted as boundary degrees of freedom.
In general, boundary fields are not the pullback of bulk phase space variables to . Thus, one can obtain coordinates for the cotangent bundle , where are coordinates for the canonical configuration space in the bulk and boundary, respectively. Furthermore, are the corresponding momenta over .
The kinetic term determines the kinematical non-degenerate symplectic structure of the theory, which can also have a boundary term
1As mentioned before, in gauge theories, there are first-class constraints , , and in general there can be bulk and boundary constraints. The theory can also have second-class constraints (SCC), , . For our purposes, it is sufficient to restrict our considerations to the subspace of the phase space where the SCC constraints are imposed as strong equalities, .
The evolution is tangent to the first-class constraint surface,
and the pullback of
to
becomes degenerate. The Hamiltonian that governs the dynamics of the theory is obtained by adding to the canonical Hamiltonian a linear combination of the smeared FCC constraints
, where
are arbitrary multipliers. For any choice of multipliers, there is a unique corresponding Hamiltonian vector field
defined as
where
. The vector field
should be tangent to
. Let us denote by
the Hamiltonian vector fields that correspond to first-class constraints, then
where
is the pullback of
to
.
Even when one has the same Hamilton equations in both formalisms, there is a subtle difference in how one uses them. Contrary to in covariant formalism, in the canonical approach, one starts from
H and constructs the corresponding
. There are two possibilities, depending on the form of the symplectic structure. In the first,
has a vanishing contribution from the boundary, so there cannot be any boundary terms in (
17) and (
18), and that imposes some boundary conditions on bulk canonical variables. This corresponds to the standard Regge–Teitelboim scenario. In the second case,
has a non-vanishing contribution from the boundary. Then, there is a boundary contribution to the Hamiltonian vector fields, and generally there are also boundary conditions on the bulk configurations [
18].
Let us now compare both formalisms and recall how they are related, as well as how one can pose the problem of having equivalent structures at the pre-symplectic level.
2.3. Comparison and Statement of the Problem
In the introduction, we saw that one can define a mapping from the space of solutions to the constraint surface in the canonical phase space. The 3+1 decomposition provides a ‘canonical’ method to implement this map through a spacetime foliation, assigning to each solution
s in
its ‘instantaneous’ value
d at some ‘initial’ hypersurface
. Let us call this map
, the
canonical projection. For gauge theories, there are many solutions that induce the same initial data, so this map is non-injective. In analogy with the Lee–Wald construction [
1], let us assume
gives
the structure of a fiber bundle over
.
As we have seen, one expects that all these different solutions mapping to the same initial data
d, that is, all the points along the fiber
, belong to the same gauge orbit in
. There are, furthermore, the gauge orbits in
generated by the constraints. Those points along the orbit of
d in
, associated with initial data for different solutions, will have corresponding fibers over them. Those fibers should also belong to the same gauge orbit in
as the initial fiber we started with. Thus, intuitively, the gauge orbits in
should be larger (of higher dimension per point) than the gauge orbits in
(See
Figure 1).
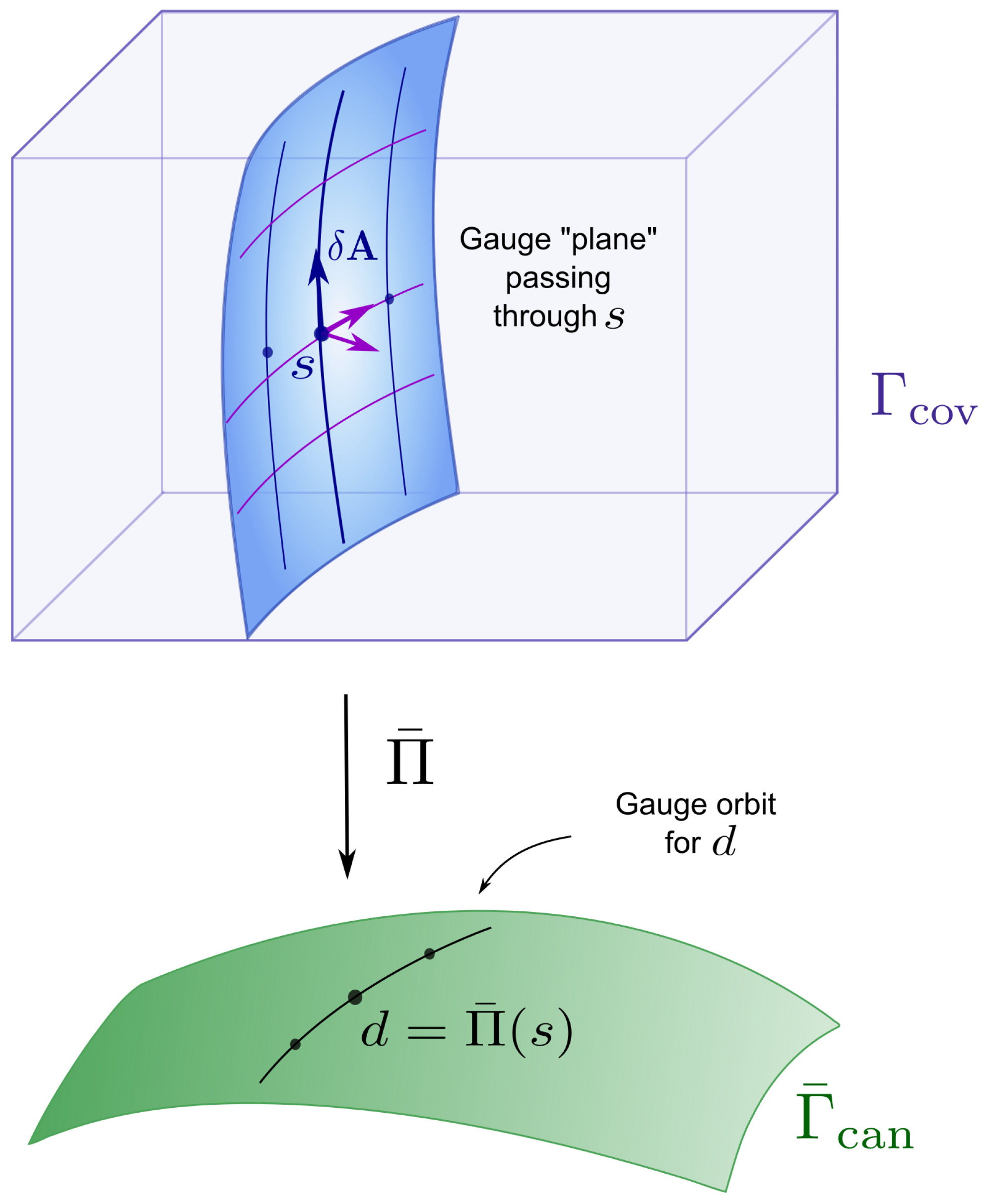
The question that was left open in the introduction was a precise way of defining an equivalence. In the discussion, we argued that this can be achieved at the level of pre-symplectic spaces; that is, relating
and
. Let us now see this in detail. Using the canonical projection
, with
s being a solution and
d its corresponding initial data, the pullback
of the pre-symplectic structure
at each point
d on
defines a pre-symplectic structure on
(a closed 2-form). Since
is a projection, directions along the fibers
are also degenerate directions of
. It follows then, by using Cartan’s formula, that the induced pre-symplectic structure
is constant along the fibers, and therefore it also has a well defined projection onto
. The question at hand is whether the induced structure
coincides with the naturally defined
coming from the covariant phase space formalism. If that happens, namely if,
we shall say that there is a precise sense of equivalence between the two formalisms. In that case, let us name both pre-symplectic structures
-equivalent (See
Figure 2).
We have made explicit the sense in which the two pre-symplectic structures are equivalent, namely if Equation (
19) is satisfied. At this stage, we should point out that in the pioneering paper by Lee and Wald, the many-to-one mapping
was a priori different from the canonical projection
arising from the 3+1 decomposition, so the fiber bundle structure induced on
by these mappings may, in general, be different: In [
1], the degenerate directions of
in the whole configuration space
of the covariant theory were shown to be integrable and hence to define a foliation of
. The complete canonical phase space
is identified with the set of equivalence classes defined by these submanifolds of degenerate directions of
, with
, the projection to the equivalence classes. The mapping
is the restriction of this projection to the space of solutions to the equations of motion.
By construction, the projection of
to the phase space
gives rise to a well-defined symplectic structure
. This symplectic structure and its pullback
to the constraint surface
, will hence, by construction, satisfy the analogous of Equation (
19). While the authors verified the equivalence of
with the pre-symplectic structure
arising from the 3+1 decomposition for specific examples (which also implies correctly identifying their phase space of equivalence classes with initial data), the overall analysis did not consider regions with boundaries, and a general discussion of equivalence was lacking. Our Equation (
19) is asking for such a comparison, even when written on the point
s on the fiber. One could project down the equation to the base point in
, and re-state the equivalence there. Both possibilities are mathematically equivalent.
In a recent paper [
2], the authors made a strong claim of equality between symplectic structures, for generic theories and with the inclusion of boundaries. It is not clear whether their results apply to gauge theories. In what follows, we shall consider several examples and find that, even when in several cases we do have
-equivalence, we find one example for which Equation (
19) is violated. This counterexample is enough to invalidate
-equivalence (or correspondingly the equivalence of
with
), as a generic property for gauge theories. Let us now consider several concrete examples.
4. Pontryagin Theory
As another example of a gauge theory defined in a region with boundary, let us consider a topological theory, defined in the bulk, namely the
Pontryagin theory on the 4D spacetime region
, with boundary. This section has two parts. In the first, we perform a covariant Hamiltonian analysis of the theory, and in the second, we recall some results of the corresponding canonical analysis [
5].
The Pontryagin action for the Abelian theory is
where
is an arbitrary real parameter.
4.1. Covariant Approach
The variation in (
32) only has one boundary contribution, since the bulk equation of motion,
, is trivially satisfied,
where
, with
. This term should vanish to have a well-defined variational principle, even in this case where there are no equations of motion in the bulk. Since
on
and
, we see that the condition
defines boundary conditions of the theory. One possibility is that
but (
34) can be fulfilled even without (
35), as is the case for perfect conductor boundary conditions [
18]. The covariant phase space
is then defined as a space of
all connections, such that (
34) holds.
The corresponding symplectic structure
must vanish identically, since (
32) is a topological term. Indeed, (
33) can be rewritten as
As a consequence, as we have seen in
Section 2, the symplectic current
vanishes, as does the symplectic structure on the covariant phase space of the theory
This implies that every direction is a degenerate one. The reduced phase space is then trivial, in the sense that it does not have local degrees of freedom. There can only be global boundary degrees of freedom when the boundary has non-trivial cohomology.
4.2. Canonical Approach
The first step in the Hamiltonian analysis is to perform a
-decomposition of the action. As before, we introduce an everywhere timelike vector field
and a ‘time’ function
t, such that
. Then, the canonical form of
is
From (
38), we can read off the form of the kinematical symplectic structure
and the corresponding proposal for the canonical Hamiltonian,
. There are four primary constraints
Following Dirac’s algorithm, we define the total Hamiltonian as
, where
and
are the corresponding smearing one-form and function. The total Hamiltonian defines the evolution via its corresponding Hamiltonian vector fields (HVF)
, given by
Since only has a bulk contribution, it follows that cannot have any boundary terms, leading to two conditions: and .
It is known that all of the primary constraints are first-class and that there are no new secondary-class constraints. If we denote the HVF corresponding to the four FC constraints
as
2, then the pullback of
to the constraint surface,
, is degenerate,
, for every
. In particular,
Since HVF
spans the four-dimensional
, the corresponding pullback of the symplectic structure
is trivial
for every
.
It is at this level where we can ask for the equivalence between covariant and canonical pre-symplectic structures. The first observation is that the -map does not exist. To begin with, the space of solutions is the full space of field configurations . If we induce initial data from any such configurations on a hypersurface , these data will not in general satisfy the four first class constraints of the canonical theory. Thus, if the -map does not exist, the two descriptions can not possibly be -equivalent. They are equivalent, however, at the level of reduced phase spaces. We have seen that the covariant pre-symplectic structure is trivial, so every direction is a gauge direction. In the canonical case, the induced structure is also trivial in , so all tangent directions to it are also gauge directions. The final description is that, in canonical theory, the reduced phase space has no local degrees of freedom either.
8. Discussion and Conclusions
The main objective of this manuscript was to address the issue of equivalence between covariant and canonical Hamiltonian descriptions of gauge field theories when boundaries are present. Notwithstanding the previous efforts to tackle this issue, we approached the problem from a natural ‘canonical perspective’. That is, we followed standard procedures to both Hamiltonian formalisms and compared them using a natural notion of equivalence (referred to as
-equivalence) between them. This notion seems not to fully coincide with previous studies on the question at hand (see, for instance, [
1,
2]). The main question we tried to answer was motivated by physical considerations: How can we be assured that the physical predictions of both approaches can be regarded as equivalent? At first, we formulated the problem within the available formalisms and put forward a proposal for equivalence. The main idea is that we should compare the two formalisms at the level of pre-symplectic structures; that is, before taking any quotients through gauge directions. This is the context within which we prescribed our notion of equivalence. Next, we considered several examples of gauge theories that have previously been studied in the literature, in order to revisit them from a new perspective. This novel perspective allowed us to approach some well-known systems.
We started by considering Maxwell theory, where it is easy to show that both descriptions are -equivalent. Next, we analyzed the Pontryagin term. Here, due to the topological nature of the action, we found somewhat ‘singular’ formulations, which lie outside the realm of comparison. One can see, though, that both descriptions become equivalent at the level of (trivial) reduced phase spaces. Next, we considered the Chern–Simons theory induced at the boundary through the Pontryagin term. In this case, one can show that both formulations are equivalent. The Maxwell–Pontryagin theory was then analyzed. Here, we found that both descriptions are indeed inequivalent; in the covariant approach, there is only a contribution to the pre-symplectic structure from the Maxwell term, while in the canonical analysis, we found, apart from the Maxwell contribution, a -dependent boundary contribution. This result shows that -equivalence is not a generic feature of gauge field theories. Finally, we analyzed Maxwell+Chern–Simons theory. In this case, there was a contribution to the pre-symplectic structure that arises from both descriptions, so they turned out to be -equivalent.
In this manuscript, the examples we considered can be regarded as ‘pure gauge theories’, in the sense that the only dynamical variable is a
connection
. There are, however, other gauge theories (as defined by having FCC or degenerate directions in the pre-symplectic structure) in regions with boundaries, where both methods have been compared (see, for instance [
19,
20]). The most notable example is the treatment of isolated horizons (IH); that is, generalizations of Killing horizons used to model black holes in equilibrium. These systems have been treated both with canonical formalism [
8,
9,
21] and with the covariant approach [
11,
22]. By comparing these results, we can immediately see that there is an important difference between them. The most salient feature appears within the theory in the vacuum. Here, one can see that the boundary contribution to the pre-symplectic structure in the covariant theory is entirely different from the (standard) contribution to the canonical description [
8,
9,
21]. Moreover, when coupling to the Maxwell field, there is a contribution on the IH to the pre-symplectic structure in the covariant approach [
11], while there is none in the canonical approach [
8,
9].
In this contribution, we have shown that a natural definition for equivalence, when comparing standard covariant and canonical approaches, fails to be generically satisfied. Can we conclude, therefore, that both methods are not equivalent? Our viewpoint is that we need a deeper understanding of the reasons for equivalence (or non-equivalence) or, perhaps, a refined notion of equivalence, different to the one proposed here and in the literature [
1,
2]. We believe that a satisfactory answer to this issue is highly relevant, since both approaches might lead to different physical predictions for theories of interest (as they do, for example, when dealing with BH entropy). We can only hope that this contributions might provide motivation for further studies.




{kind=link}
{kind=link}