The proposed scheme assumes that all the vehicles in the network know their own position and velocity by using a Global Positioning System (GPS). In addition, periodic hello messages are exchanged between the neighboring vehicles. These broadcast hello messages provide position, velocity, and ID information. Thus, each vehicle is able to create and update its own neighboring information table.
In addition, each vehicle is going to include the IDs of its neighboring vehicles in the header of the message. Since this may introduce high overhead, we propose to use the Bloom filter technique to mitigate this overhead, as explained in the following subsection. Based on IEEE 1609.2, all communications and data exchanging are secured.
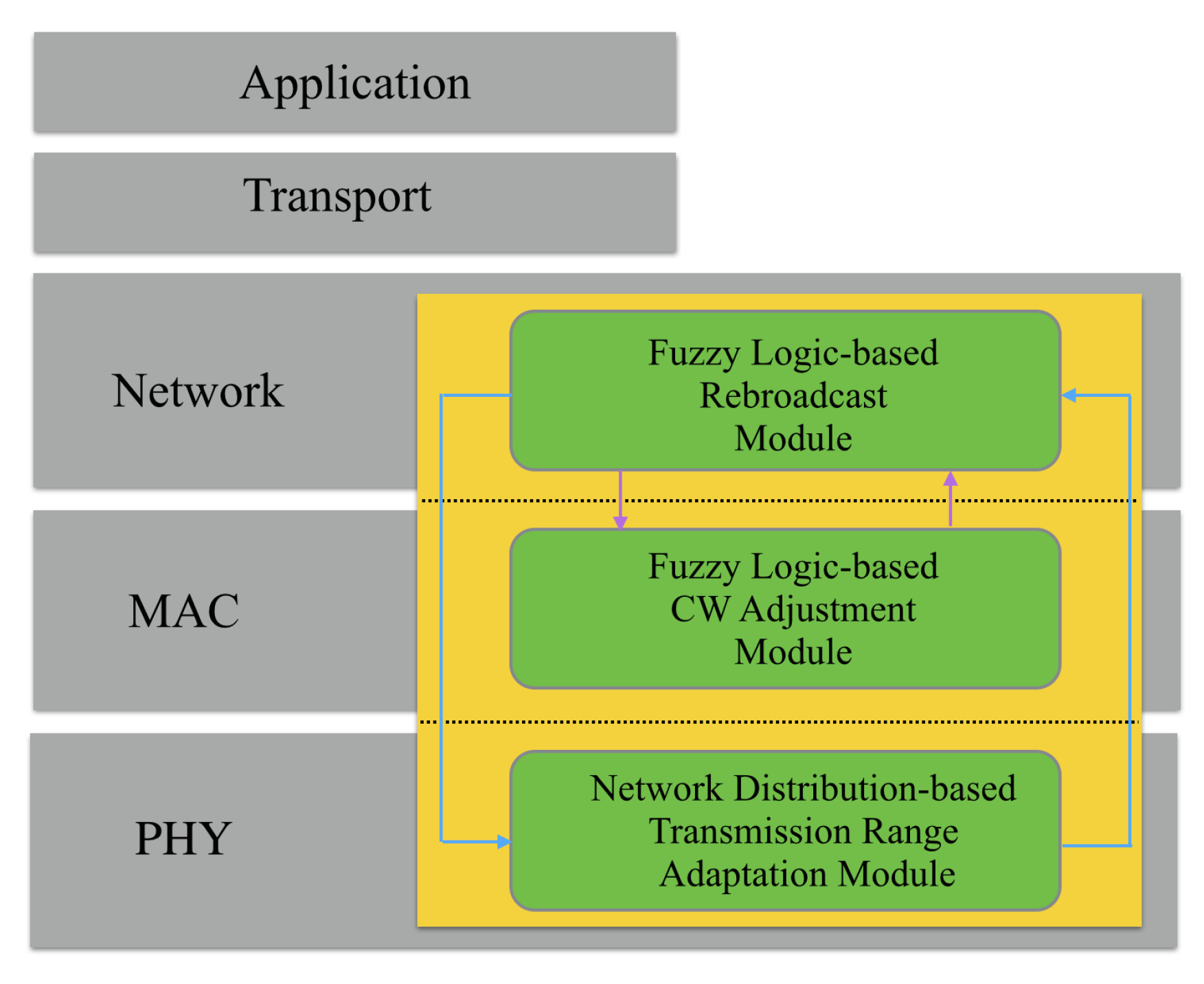
3.1. Fuzzy Logic-Based Rebroadcast Module
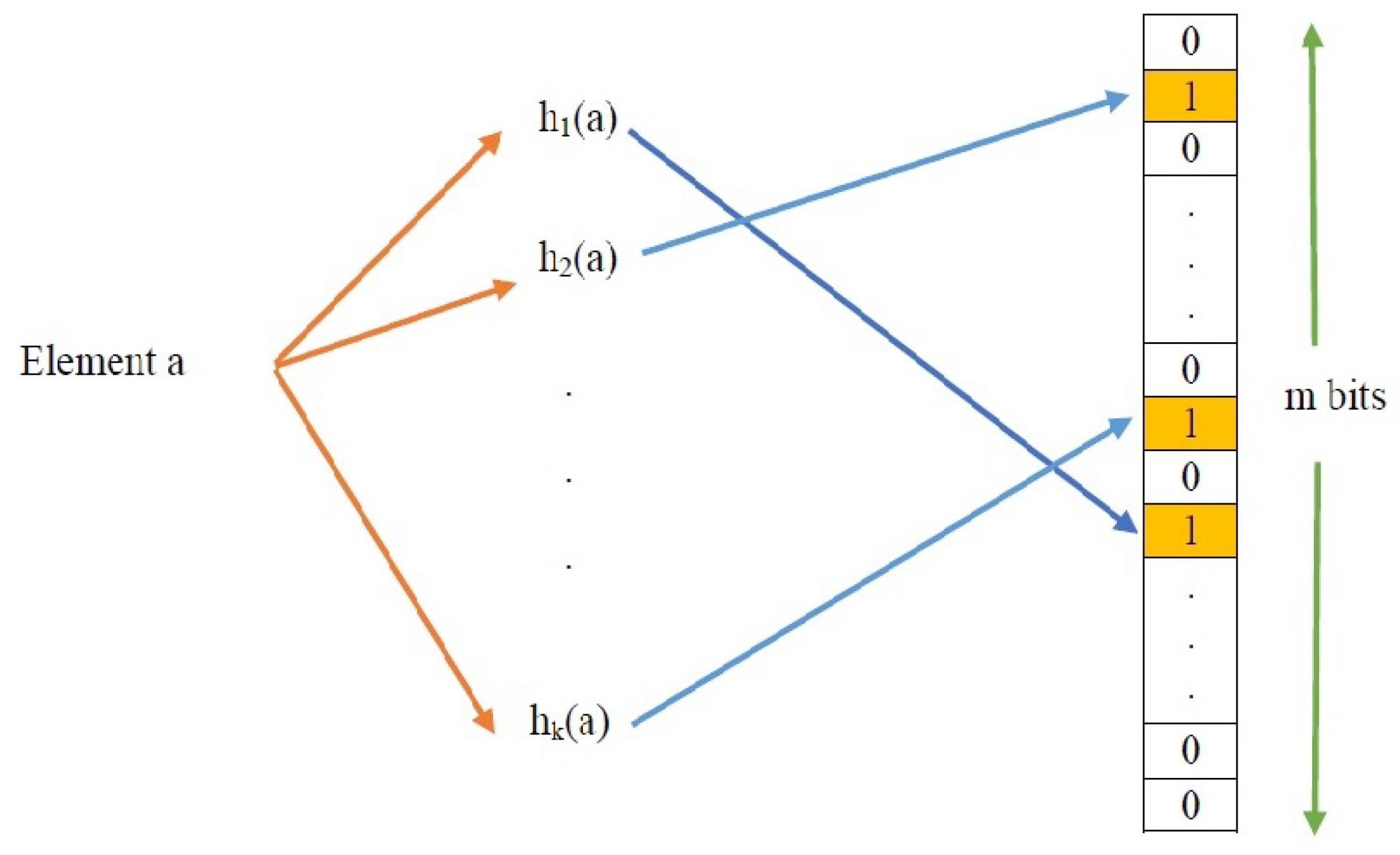
The protocol uses Bloom filter technique to mitigate the overhead resulting from the inclusion of neighbors IDs in the header of the broadcast message. A Bloom filter is a space and time efficient data structure which is used to check whether an element is present in a set [
38]. This probabilistic data structure shows that the element either definitely is not a member of the set or might be a member of the set. As shown in
Figure 2, each Bloom filter is made up of two basic parts: an
array and
k hash functions
,
…
. Initially, all the
m bits of the Bloom filter are set to 0.
To map an element a into a Bloom filter, first the hash functions are applied on a, which generates k indexes within the range . Then, all the array’s bits at the location of these generated indexes will be set to 1.
To search for an element b in a Bloom filter array, the first step is again to apply the hash functions to produce k indexes. If all the bits that are located at these indexes have been set to 1, then element b can be considered a member of the set.
Here, the only type of error that can be named is false positive, which reports a non-member element b as a member of the set.
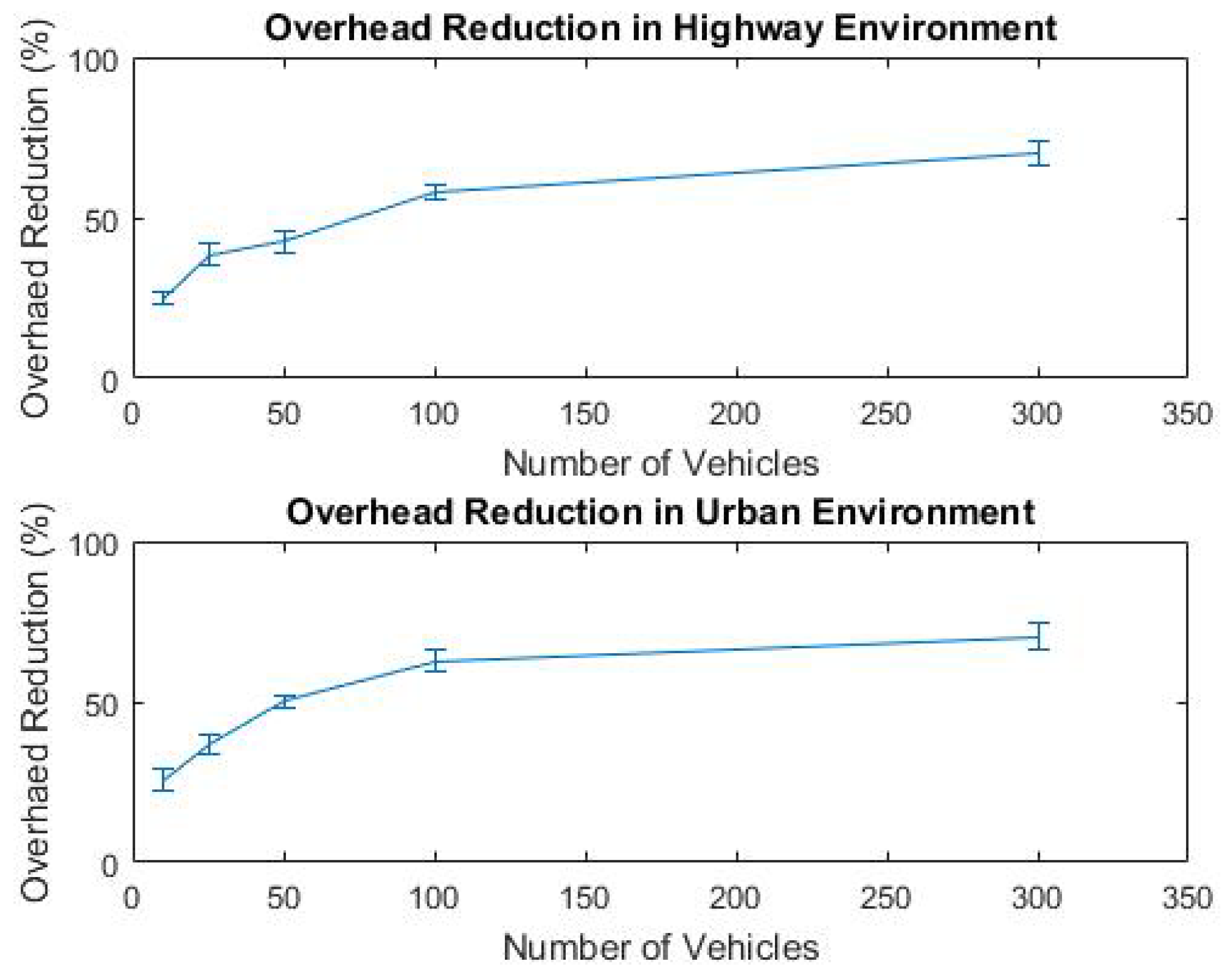
The proposed rebroadcast scheme inserts the neighbors IDs of a broadcasting vehicle into a Bloom filter and adds it to the header of the broadcast message. Then, each receiving vehicle checks whether its neighbors belong to the array of the received broadcast message and determines the common (shared) neighbors with the transmitting neighbor. Bloom filter-based overhead reduction is shown in
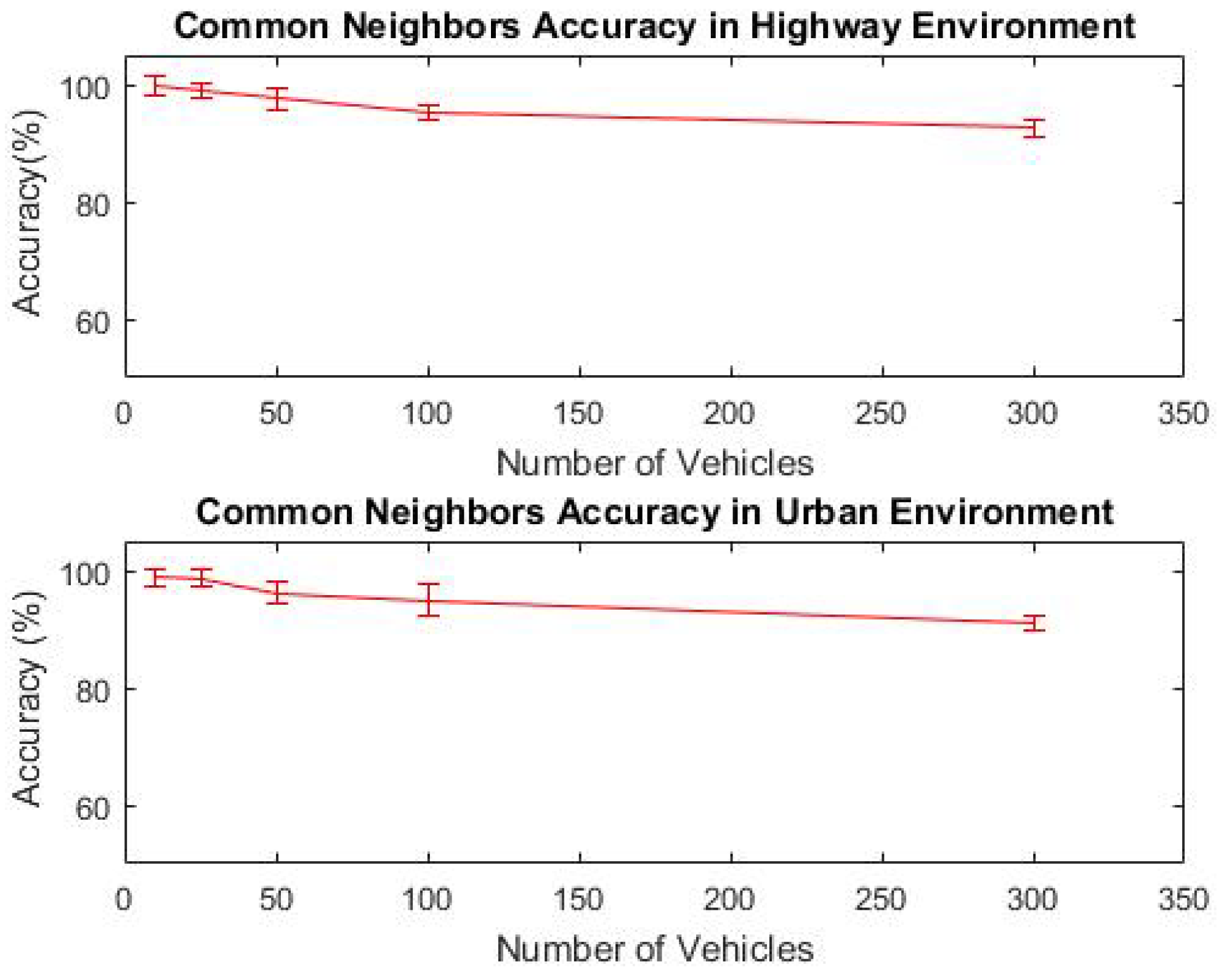
Figure 3. Based on the proposed Bloom filter technique, the system achieves up to 80% overhead reduction for both highway and urban environments as the number of vehicles increases. In addition, the accuracy of determining the common (shared) neighbors based on the Bloom filter is shown in
Figure 4.
When Vehicle
r receives a new broadcast message with a unique sequence number, the protocol uses a random assessment delay technique to identify the transmitting neighbors of vehicle
r from which the message has been successfully received [
39].
Based on the random assessment delay technique, when a message is received from one of the neighbors at distance l, vehicle r records the message along with the neighbor ID and sets a backoff timer to a maximum value multiplied by , where R is the transmission range. It means that messages received from farther neighbors will have shorter backoff times. If vehicle r receives the same message from other neighbors, it resets the timer before the timer expires. After the timer expires, vehicle r will have a record of the received messages and their transmitting vehicles, and we call them the transmitting neighbors.
We consider a set of potential rebroadcasting vehicles (SPR) as the common (shared) neighbors between vehicle r and its transmitting neighbor(s), which are assumed to receive the message and proceed whether to rebroadcast. In order to identify SPR, the protocol determines if the IDs of the neighbors of vehicle r belong to the Bloom filters received from these transmitting neighbors.
Given that false negative of a Bloom filter is 0, the uncommon neighbors between vehicle r and its transmitting neighbors are predicted correctly. Then, the protocol can estimate the common (shared) neighbors between them by eliminating the uncommon neighbors from vehicle r’s set of neighbors. These common (shared) neighbors form SPR have the potential to rebroadcast the message.
To achieve high bandwidth efficiency, a fuzzy logic system is designed to determine the qualification of vehicle
r to rebroadcast the broadcast message. This proposed fuzzy logic system is fed with mobility and coverage factors as inputs [
21]. Vehicle
r calculates the mobility factor (MF) using Equation (
1):
where
denotes the velocity of vehicle
i and
and
are the minimum velocity and maximum velocity of the potential rebroadcasting vehicles including vehicle
r. Vehicles with a lower velocity will have a lower mobility factor. Vehicles with lower mobility factors are more qualified to rebroadcast the message.
To obtain the coverage factor (
), the distance-to-mean method is used [
15]. The distance-to-mean method determines the distance from the vehicle to the spatial mean of the potential rebroadcasting vehicles. The spatial mean of a set of
n points, (
,
), is calculated as:
If the position of vehicle
r is at (
x,
y), then the normalized distance to mean variable,
, is measured using Equation (
3):
where
is the current transmission range of vehicle
r. A small value of
indicates that the potential rebroadcasting vehicles are distributed evenly around vehicle
r, which means that vehicle
r should not rebroadcast.
As shown in
Figure 5, we use the trapezoidal membership functions for mobility and coverage factors, and also for the membership functions of the output. Based on the mobility membership function, vehicle
r calculates the degree of mobility
Similarly, it determines the degree of coverage
. We use Max-Min fuzzy inference method, in which the fuzzy operator AND takes the minimum value of the antecedents [
24]. Considering the fuzzy values of the input variables and applying If-Then, rules (as given in
Table 1), the status of the vehicle, either rebroadcasting or non-rebroadcasting, is determined. In this work, we use the most popular defuzzification technique, Center of Gravity (COG), which is widely used in actual applications.
The qualification of vehicle r to rebroadcast will be checked based on the proposed fuzzy module. If the status of vehicle r is determined as non-rebroadcasting, it drops the broadcast message. Otherwise, the protocol uses the fuzzy logic system to establish the set of candidate rebroadcasting vehicles (SCR). SCR includes vehicle r and the vehicles in the set of potential rebroadcasting vehicles which are recognized as qualified to rebroadcast by the fuzzy system. SCR is formed to check if vehicle r is the best candidate (based on the distance-to-mean parameter) among the set to rebroadcast the message.
Vehicle
r rebroadcasts the message if it has the largest value of distance-to-mean in SCR. Otherwise, it waits for a
time. If, after this time, it does not hear the message being broadcast by other vehicles, it rebroadcasts. This is to avoid the situation where the message is not rebroadcast by any of the candidate rebroadcasting vehicles.
is given by Equation (
4):
where
denotes vehicle
r’s distance to its nearest neighbor. The closer vehicle
r is to the nearest candidate rebroadcasting vehicle, the longer it should wait, (the larger the
is). Based on simulation results shown in [
21], we use the optimal value, 100 ms, for
. The proposed rebroadcast process in the network layer is described in Algorithm 1.
| Algorithm 1: TRAB rebroadcast method. |
 |
3.3. Distribution and Density-Based Size Adjustment
According to IEEE 802.11p MAC specification, the back off time is calculated by:
where
() is a number randomly drawn from a uniform distribution over the interval of [0,
].
is defined as:
The initialized contention window size is considered
, which is equal to 15. However, since at the MAC layer there is neither reception acknowledgment nor retransmission of broadcast frames, the contention window size does not change. In a dense network, there is a high probability to have a high data traffic load, so a small contention window causes a high probability of collision. This issue inefficiently affects the network data dissemination. In addition, when the number of vehicles in the network is small, a large contention window could increase end-to-end delay. Thus, due to these issues, in this work, we propose a contention window size adjustment algorithm which considers both the local density and the distribution information. It is assumed that the protocol will include the broadcasting vehicle’s current contention window size and number of neighbors in the header of the broadcast message. When vehicle
r receives a new broadcast message and aims to rebroadcast the message, its transmitting neighbors from which the message is successfully received will be checked. The transmitting vehicle, vehicle
t, which has the smallest contention window
in the set of transmitting neighbors will be selected. In addition, the number of neighbors of vehicle
t (
) will be captured. In the neighboring set, if multiple transmitting vehicles have the same value of
, the neighbor that has the largest number of neighbors will be considered. Since vehicle
r successfully received the message from vehicle
t, the value of
will be a reliable candidate for the contention window base value of
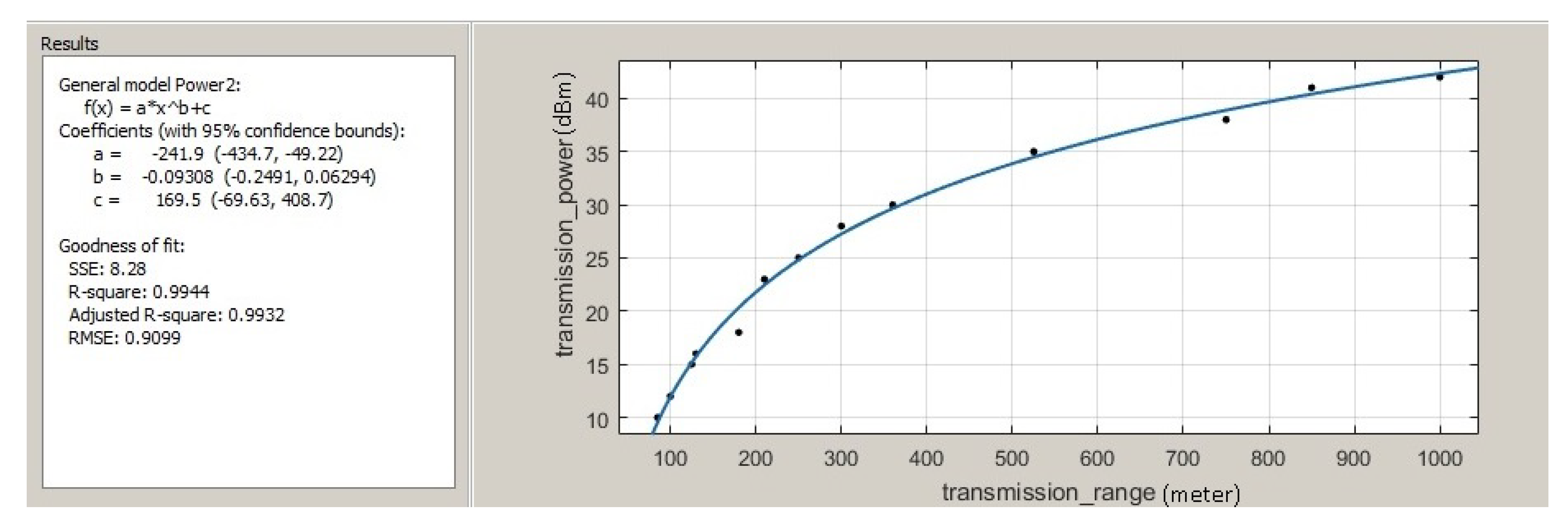
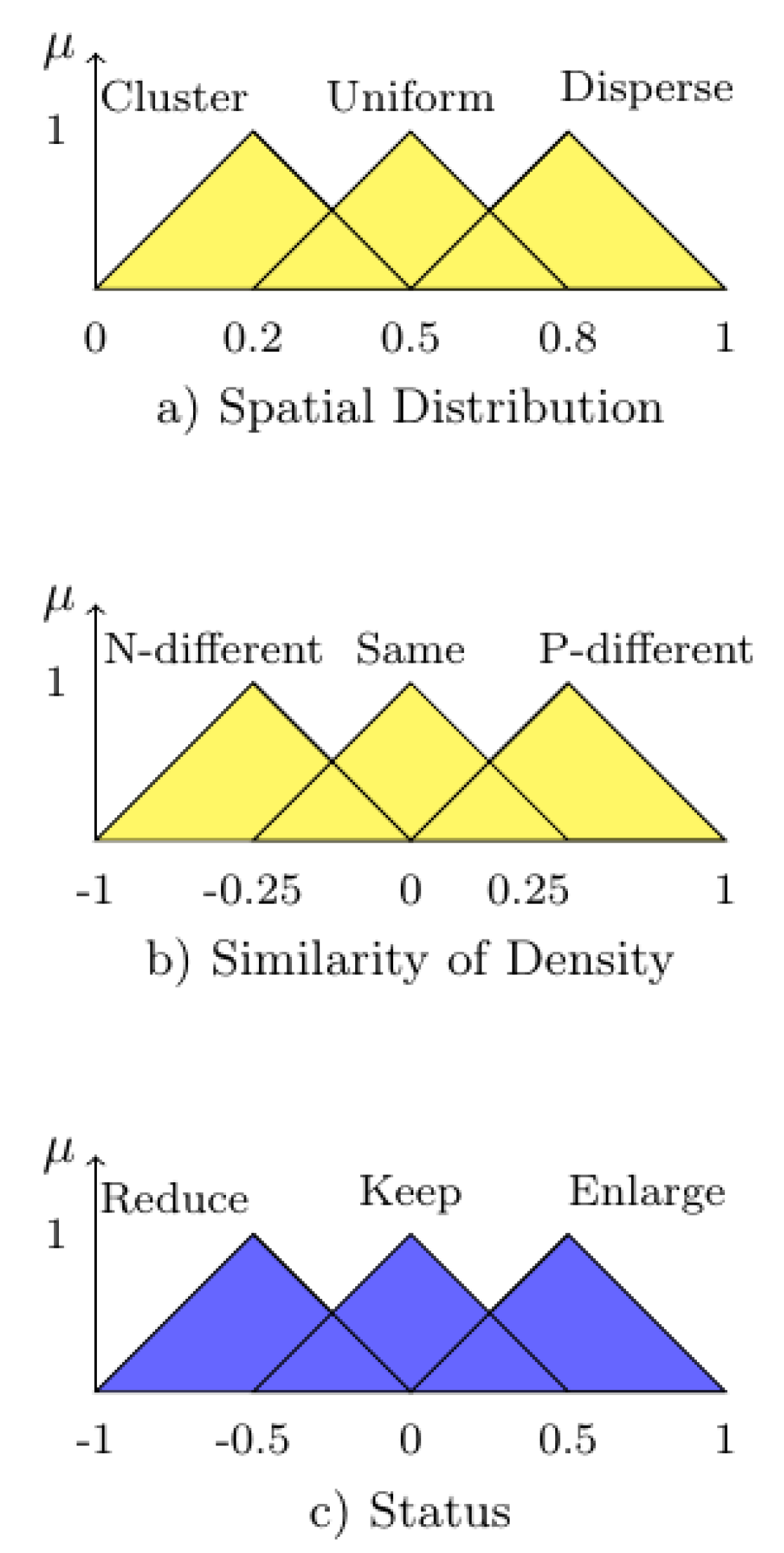
. We propose a fuzzy logic-based contention window size adjustment system based on the information of spatial distribution and similarity of density. This system is utilized by the protocol to decide to keep, reduce, or increase the base value to adjust
. For the first input of the fuzzy logic, the normalized value of
(spatial distribution measure) is used:
where, in our proposed network,
can be defined as:
As the second input of the fuzzy system, the
metric described in Equation (
13) is used:
where
denotes the number of neighbors that vehicle
r has.
will take on the values between –1 and 1. When
is less than
,
will get a negative value and, for
greater than
,
will be positive. The larger
is, the smaller the similarity of density is. In this case, if
has a negative value (
), the contention window size will be reduced, and, if it has a positive value (
), the contention window size will be enlarged.
Figure 7 shows the membership functions of the fuzzy input parameters and
Table 2 states the fuzzy IF-THEN rules.
Algorithm 3 describes the proposed contention window size adjustment method.
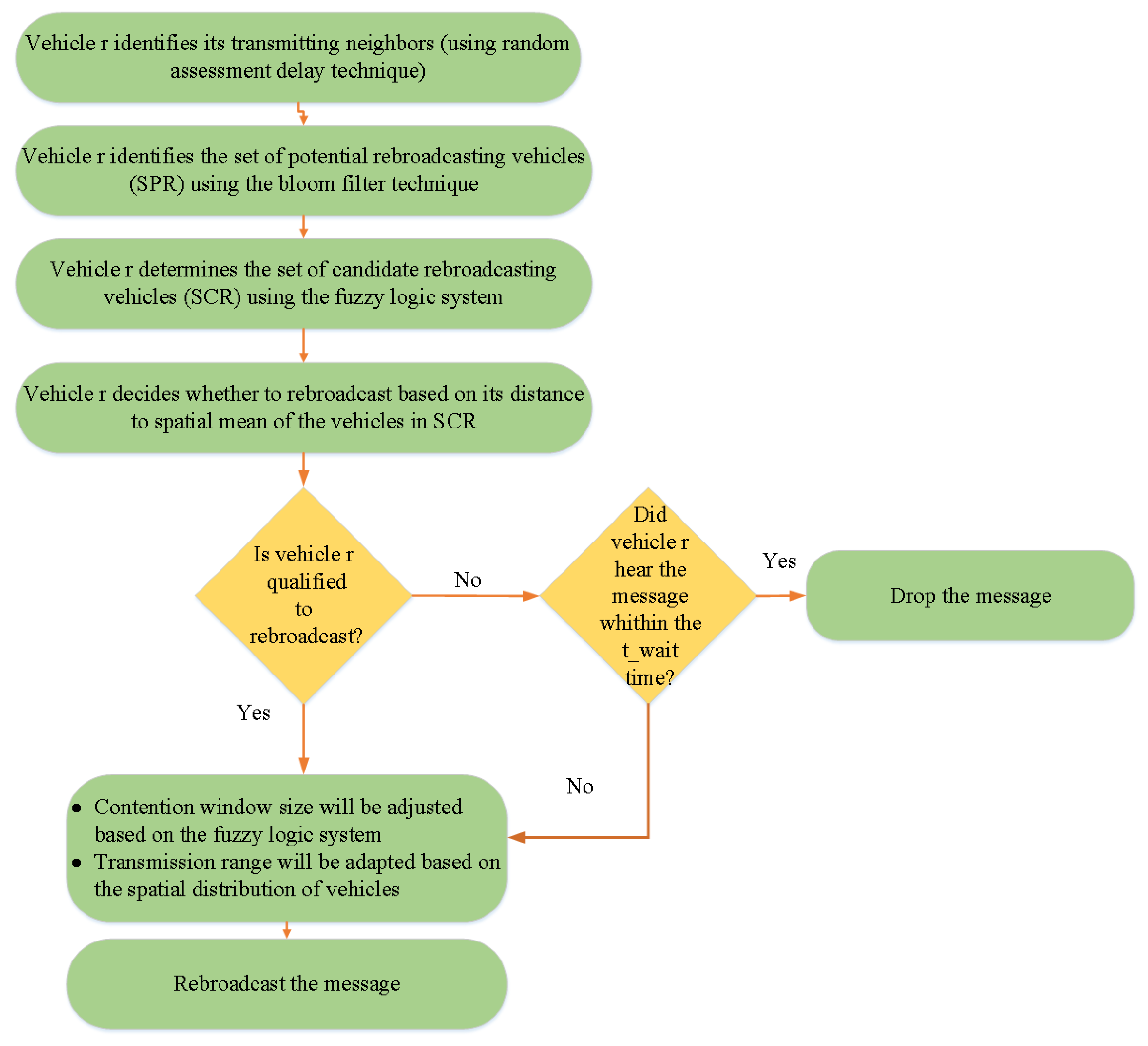
Table 3 shows the reduction of packet loss due to collisions, when the proposed fuzzy logic-based contention window size adjustment is applied. In addition,
Figure 8 shows the TRAB system flowchart.
| Algorithm 3: Size adjustment for contention window. |
 |

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}