An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction

Abstract
:1. Introduction
2. Signal Model
3. Coherent Integration Based on Two-Dimensional Frequency Correction
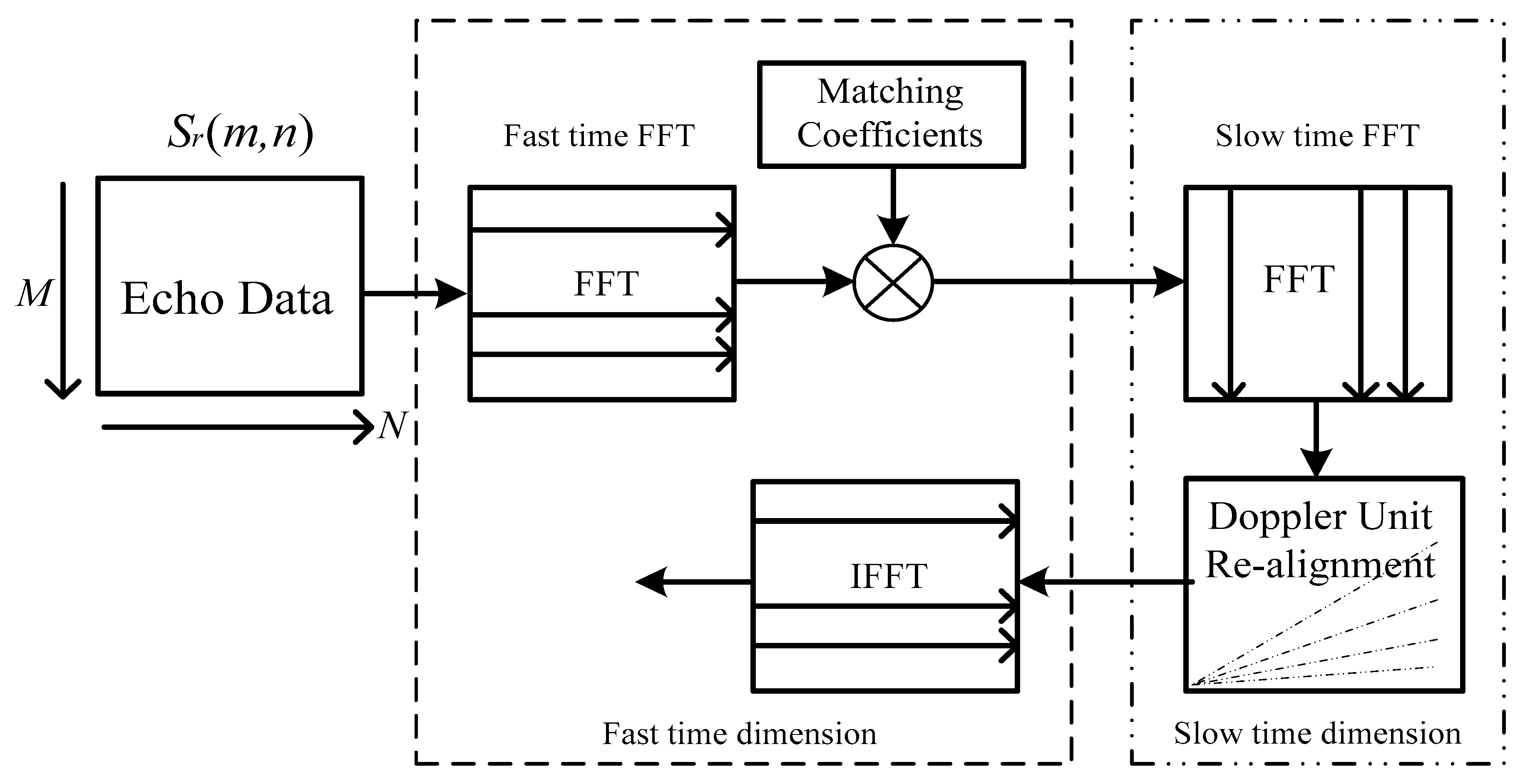
3.1. Proposed Algorithm
3.2. Fast Approcah of the Proposed Method via Chirp-Z Transform
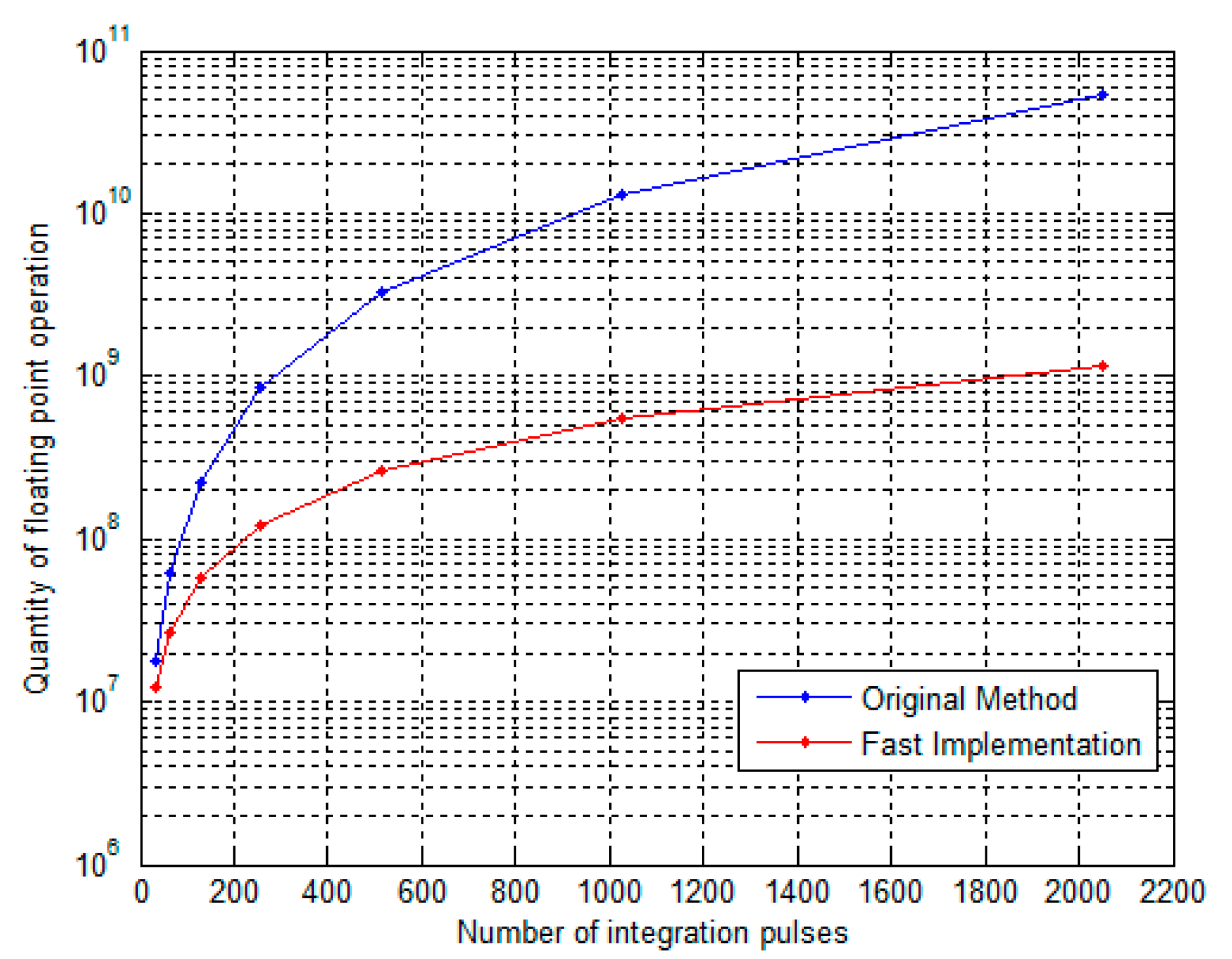
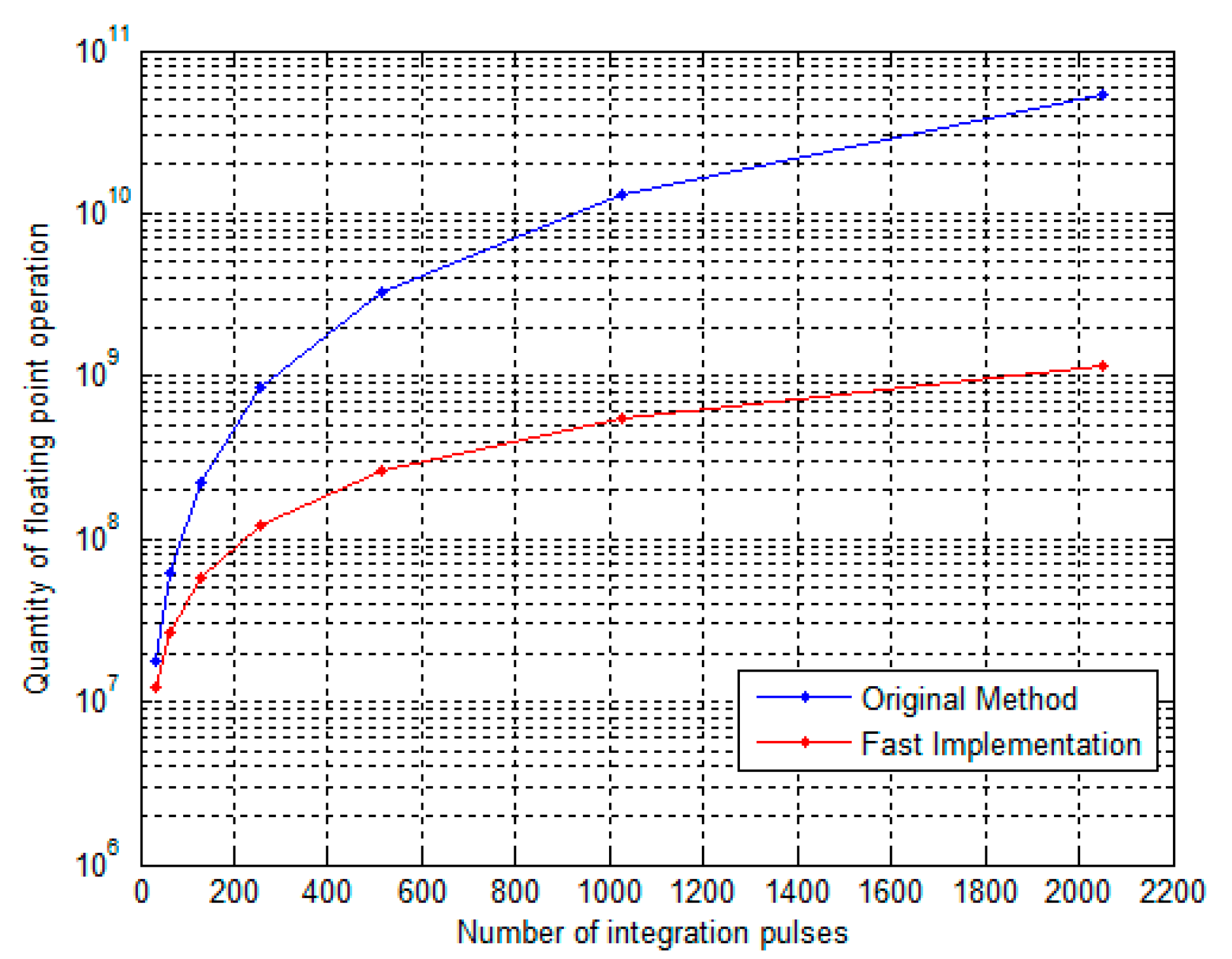
3.3. Computation Complexity Analysis
4. Numerical Experiment
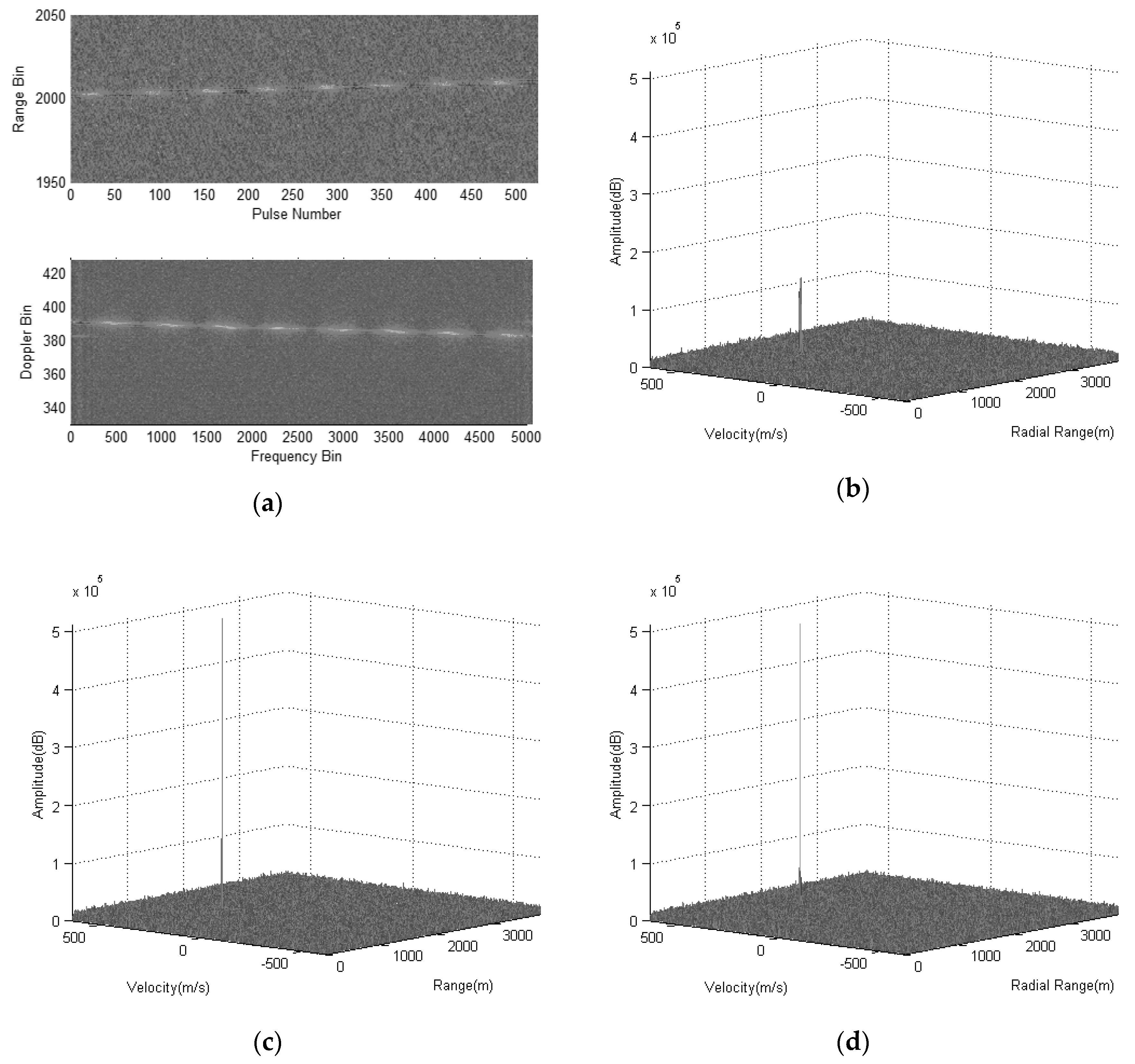
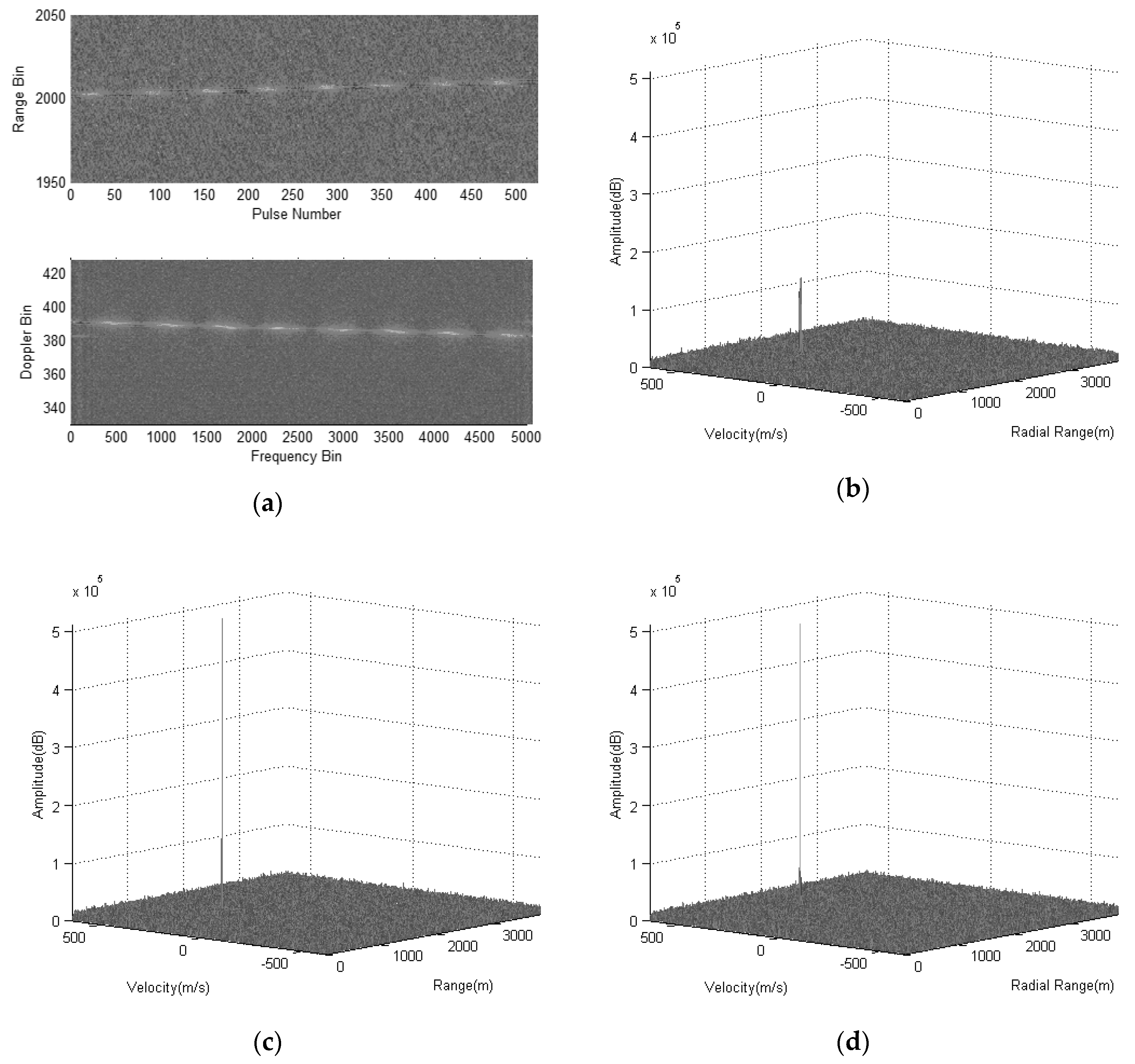
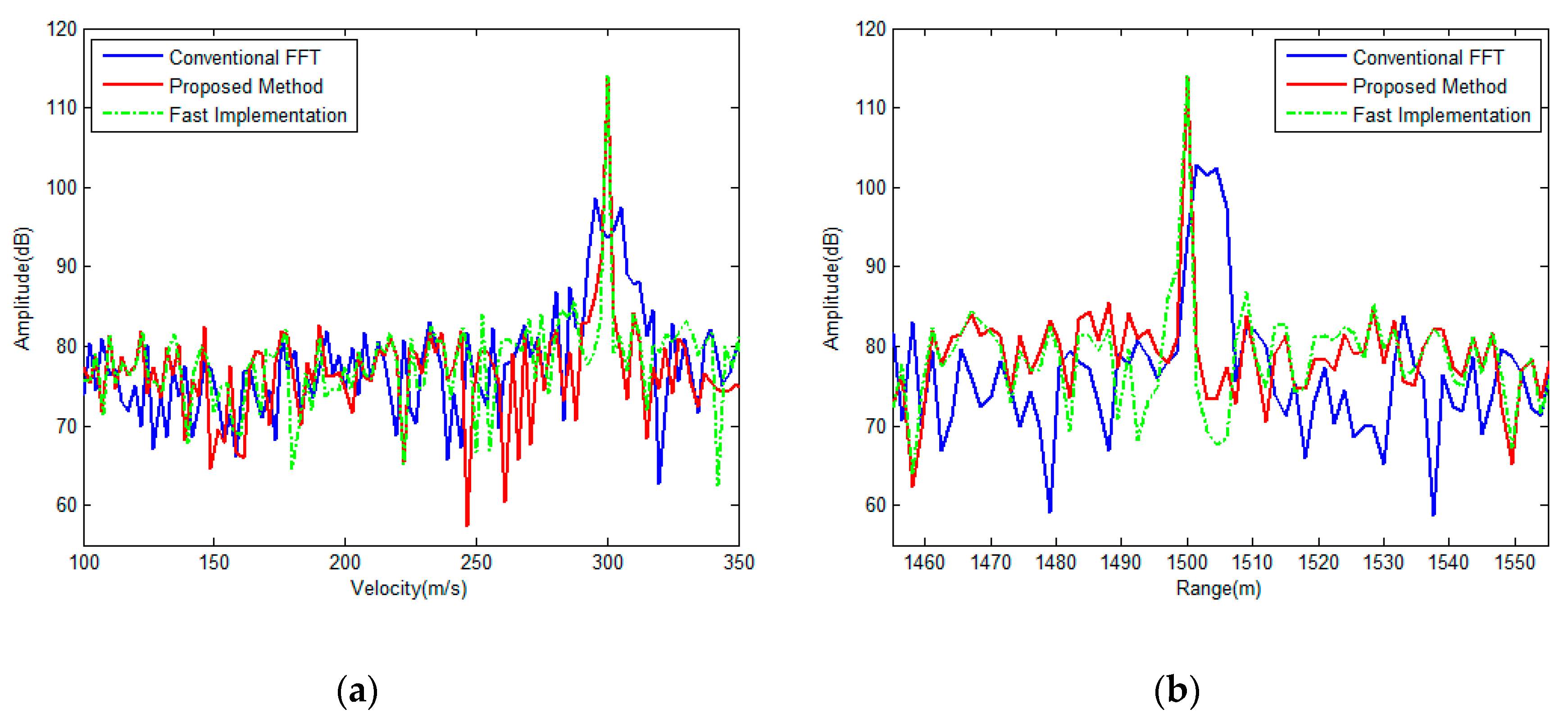
4.1. Simulation Results
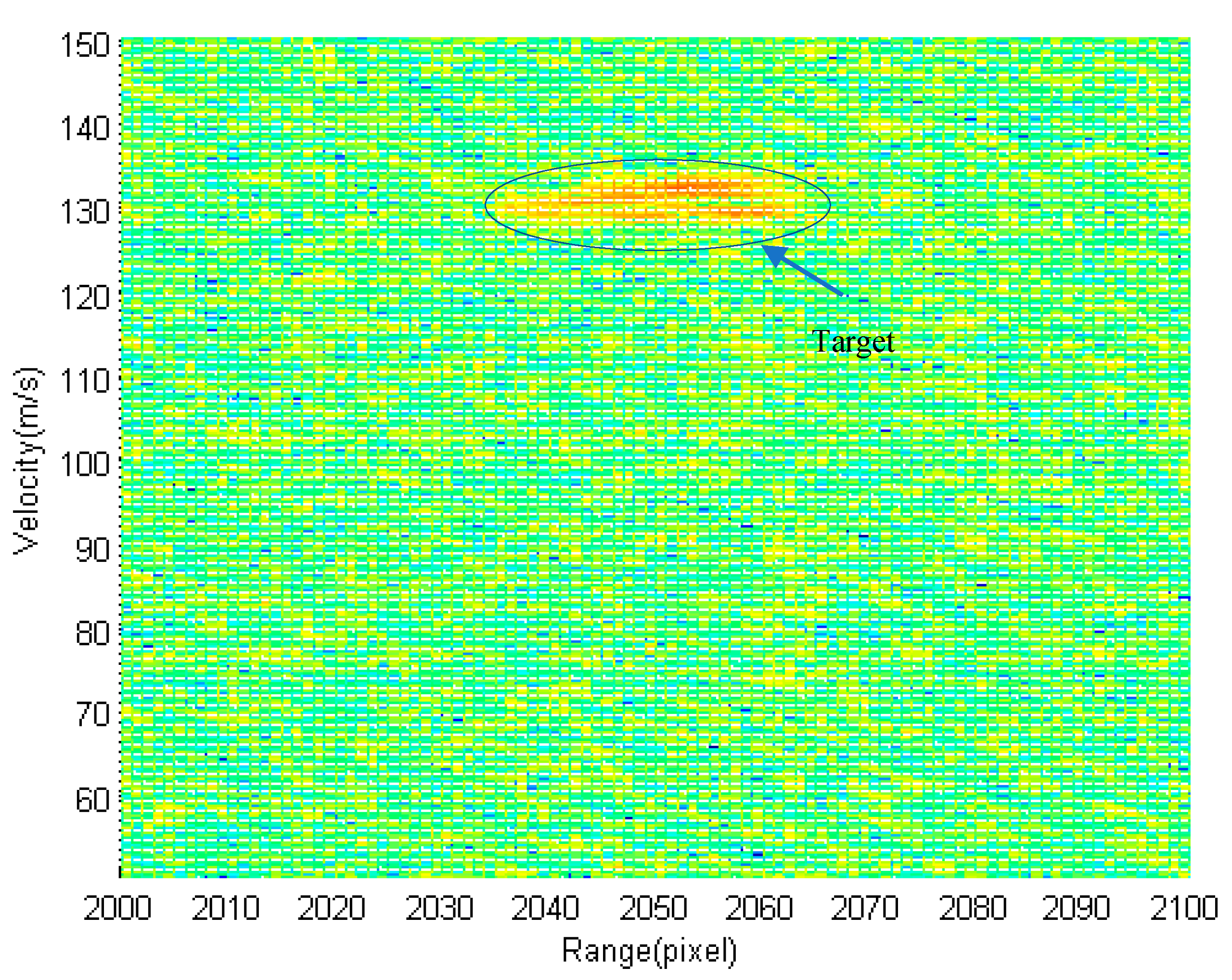
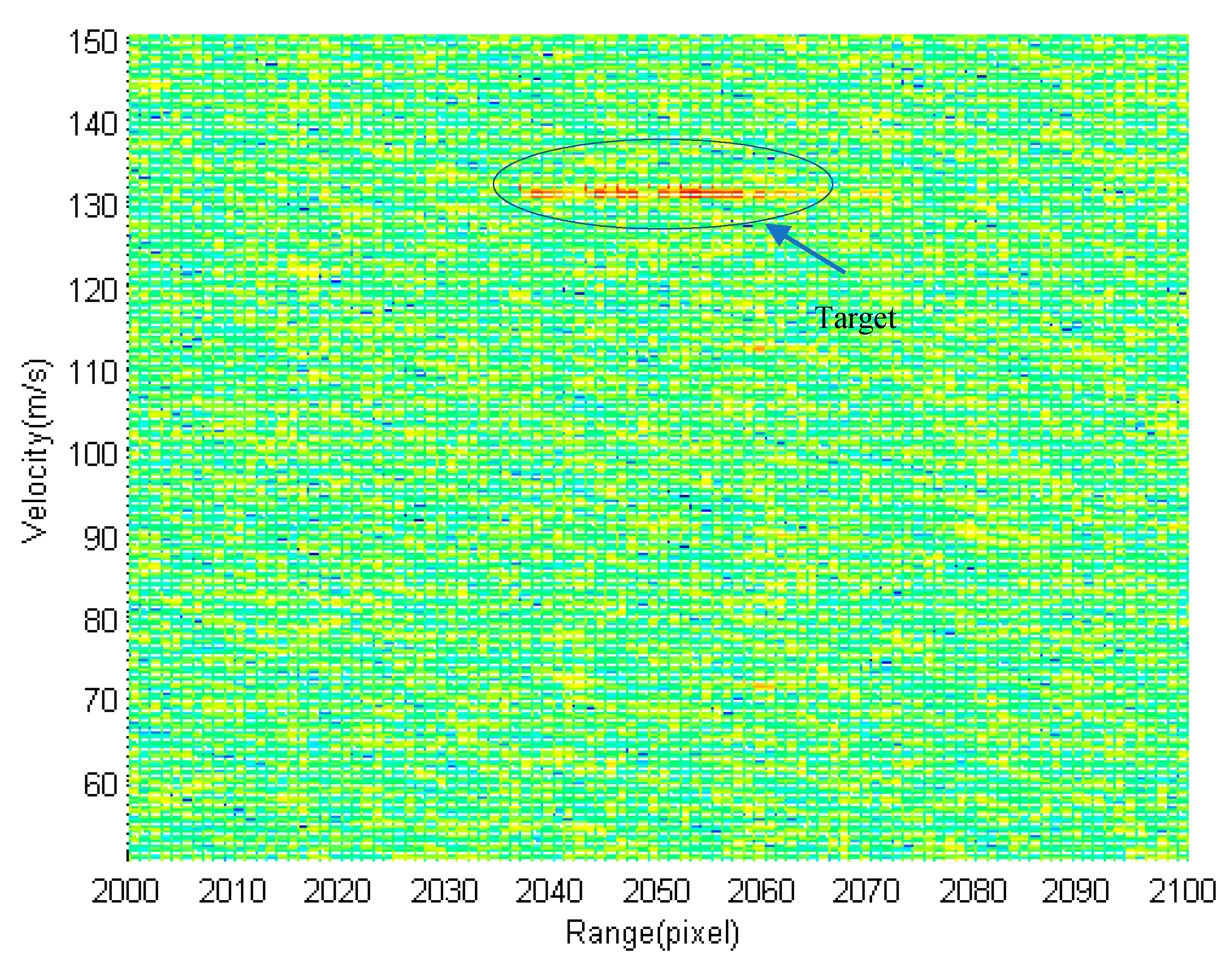
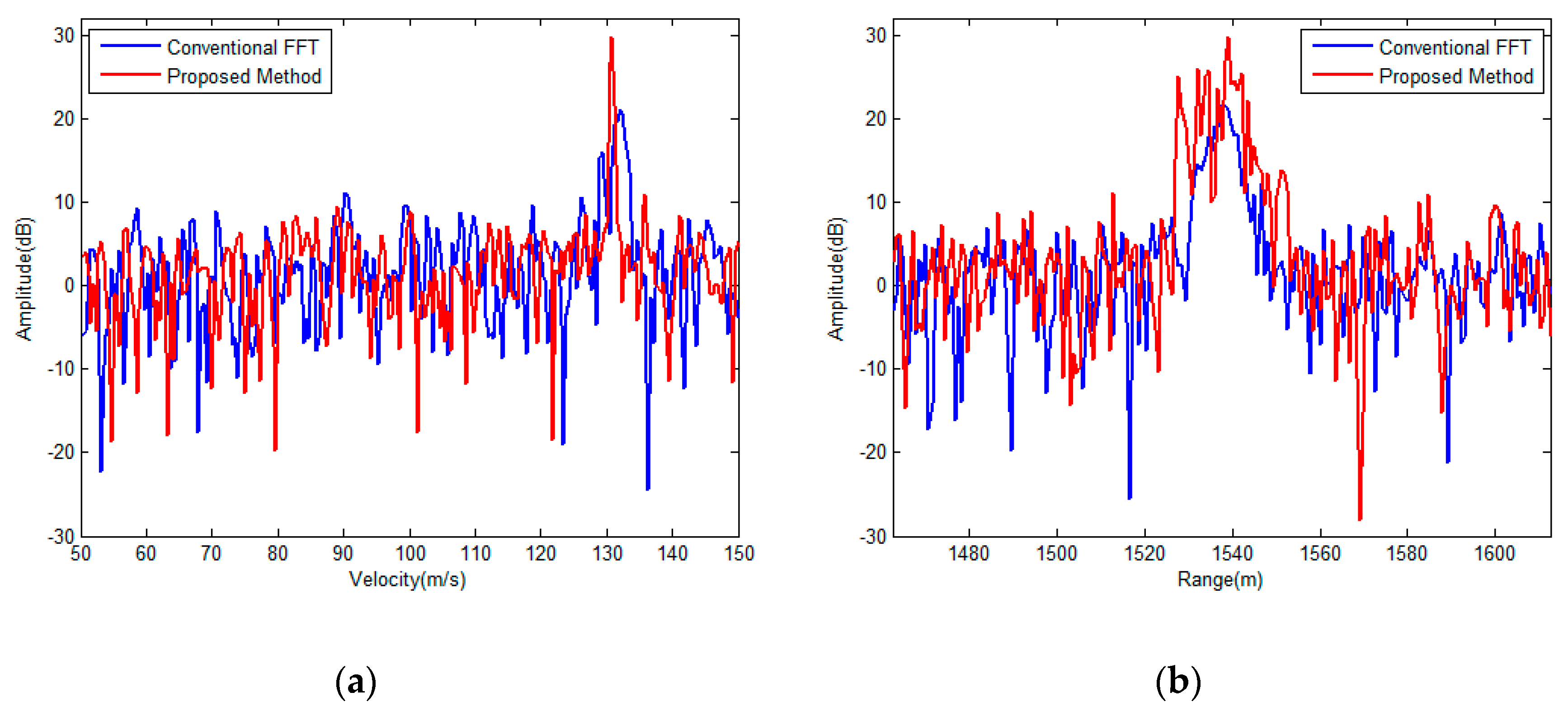
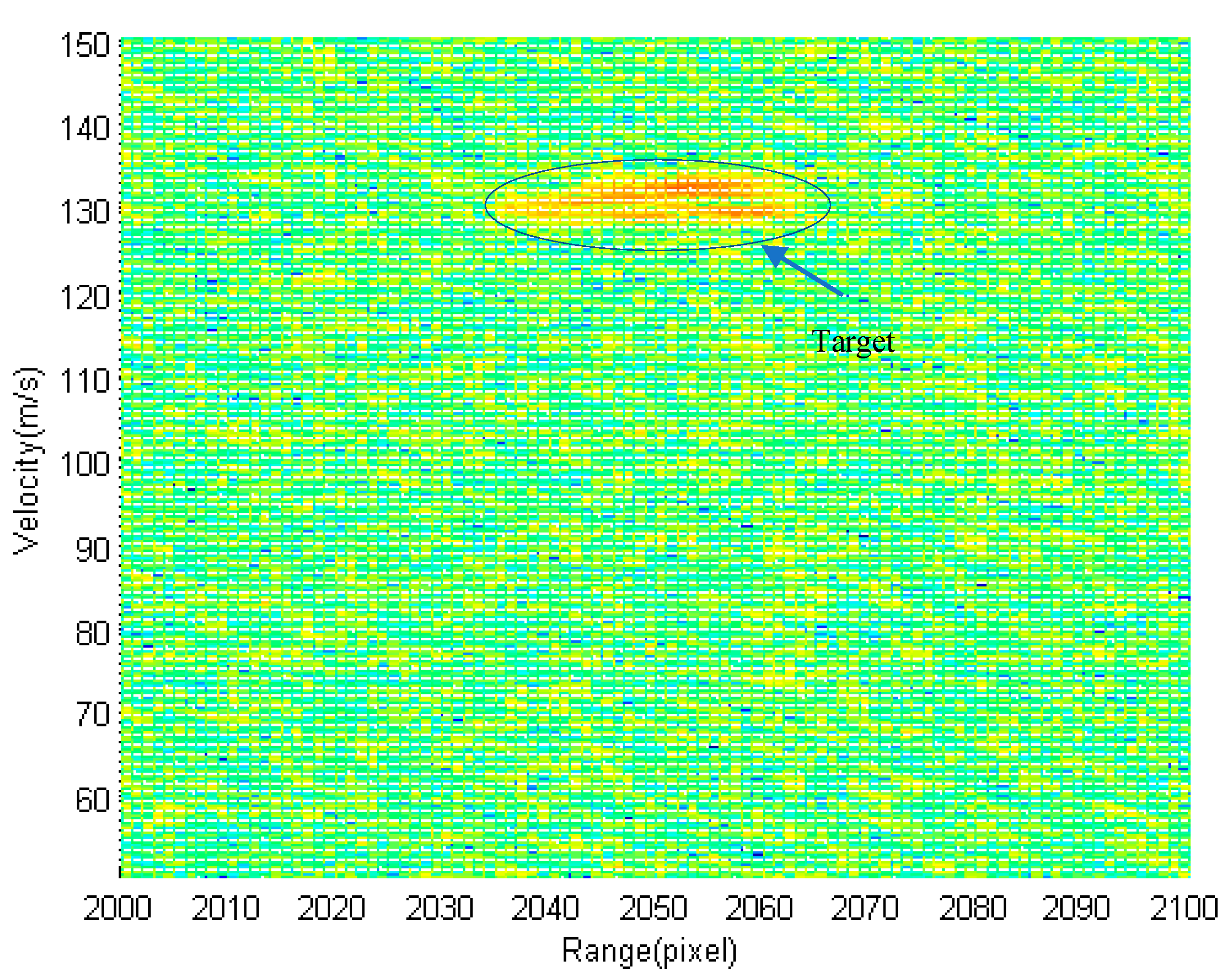
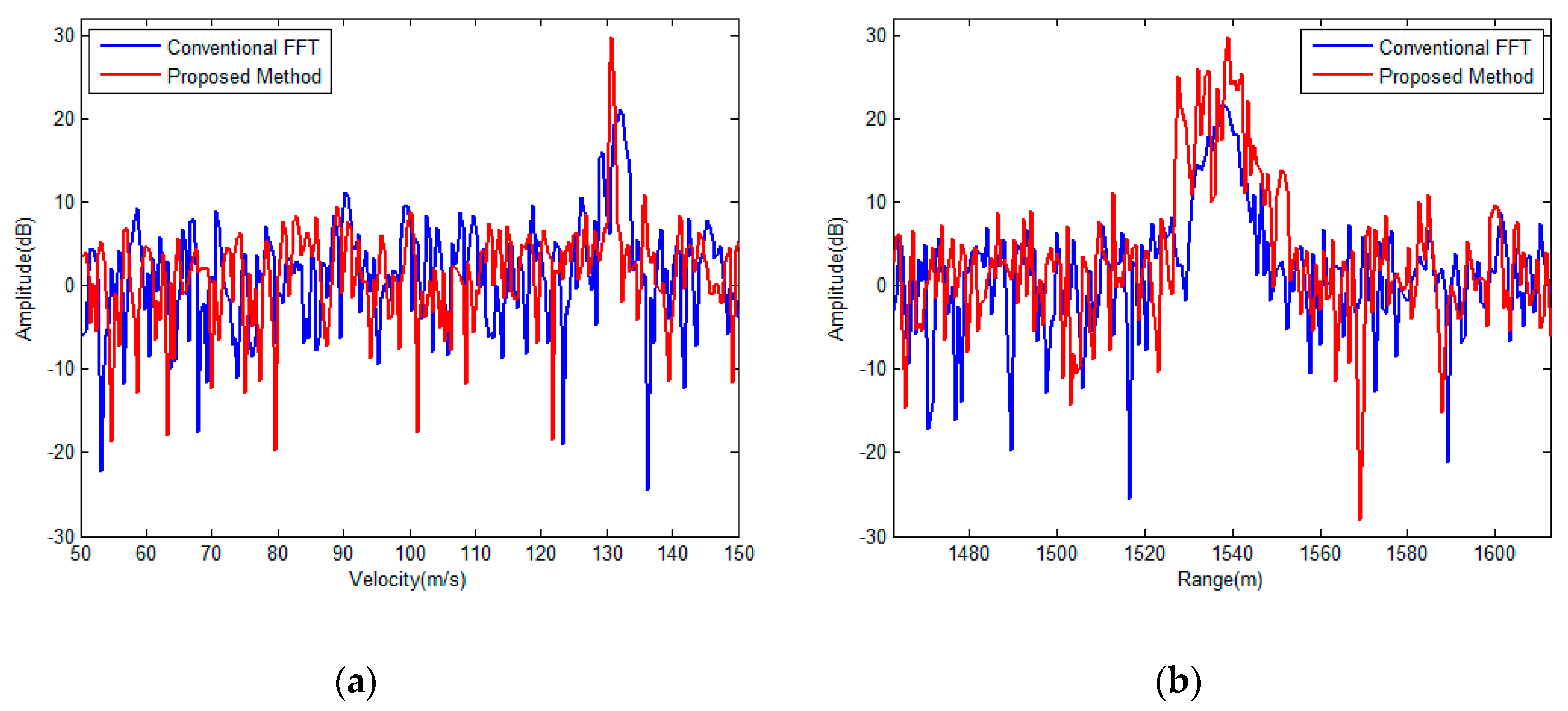
4.2. Measured Data Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wehner, D.R. High-Resolution Radar, 2nd ed.; Artech House: Boston, MA, USA, 1995. [Google Scholar]
- Liu, H.W.; Du, L.; Bao, Z. Progressing radar automatic target recognition based on high range resolution profile. J. Electron. Inf. Technol. 2005, 27, 1328–1334. [Google Scholar]
- Loomis, J.M. Army radar requirements for the 21st century. In Proceedings of the 2007 IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007; pp. 1–6. [Google Scholar]
- Skolnik, M.I.; Linde, G.; Meads, K. An advanced wideband air-surveillance. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1163–1175. [Google Scholar] [CrossRef]
- Richards, M.A. Coherent integration loss due to white Gaussian phase noise. IEEE Signal Process. Lett. 2003, 10, 208–210. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.H. Study on the motion compensation of range migration for weak moving target detection. Chin. J. Electron. 2000, 28, 56–59. [Google Scholar]
- Li, H.; Wu, S.; Mo, L. A method for long-term signal integral detection of weak targets. J. Beijing Inst. Technol. 2001, 21, 614–617. [Google Scholar]
- Carlson, B.D.; Evans, E.D.; Wilson, S.L. Searching radar detection and track with the Hough transform–Part I: System concept. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 102–108. [Google Scholar] [CrossRef]
- Carlson, B.D.; Evans, E.D.; Wilson, S.L. Searching radar detection and track with the Hough transform–Part II: Detection statistics. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 109–115. [Google Scholar] [CrossRef]
- Carlson, B.D.; Evans, E.D.; Wilson, S.L. Searching radar detection and track with the Hough transform–Part III: Detection performance with binary integration. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 116–125. [Google Scholar] [CrossRef]
- Perry, R.P.; Dipietro, R.C.; Fante, R.L. Coherent integration with range migration using Keystone formatting. In Proceedings of the 2007 IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007; pp. 863–868. [Google Scholar]
- Zhang, S.S.; Zeng, T. Dim target detection based on Keystone transform. In Proceedings of the IEEE International Radar Conference 2005, Arlington, VA, USA, 9–12 May 2005; pp. 889–894. [Google Scholar]
- Li, Y.; Zeng, T.; Long, T. Range migration compensation and Doppler ambiguity resolution by Keystone transform. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–4. [Google Scholar]
- Mahafza, B.R. Radar Systems Analysis and Design Using Matlab, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Ian, G.C.; Frank, H.W. Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation; Publishing House of Electronics Industry: Beijing, China, 2019; pp. 70–73. [Google Scholar]
- Lin, M.Y.; Ke, T.N. Radar Signal Theory; Publishing House of Defense Industry: Beijing, China, 1984. [Google Scholar]
- Yuan, H.J.; Gao, M.G.; Mou, J.C. Multi-frame Stepped-Frequency Signal Processing Based on Doppler Bin Alignment. J. Electron. Inf. Technol. 2009, 31, 1659–1663. [Google Scholar]
- Lanari, R.; Hensley, S.; Rosen, P. Chirp Z-transform based SPECAN approach for phase-preserving ScanSAR image generation. IEE Proc. Radar Sonar Navig. 1998, 14, 254–261. [Google Scholar] [CrossRef]
- Texas Instruments, Inc. TMS320C6678 Multicore Fixed and Floating-Point Digital Signal Processor: Data Manual, Texas Instruments; Texas Instruments, Inc.: Dallas, TX, USA, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing | Computation Complexity |
|---|---|
| Fast-time FFT | [(1/2Nrlog2(Nr))Im + (Nrlog2(Nr))Ia]Na |
| Frequency domain matching | NrNaIm |
| Chirp-Z Transform (CZT) | [(2P + 3/2Plog2(P))Im + (3Plog2(P))Ia]Nr |
| Fast-time IFFT | [(1/2Nrlog2(Nr))Im + (Nrlog2(Nr))Ia]Nv |
| Parameters | Value |
|---|---|
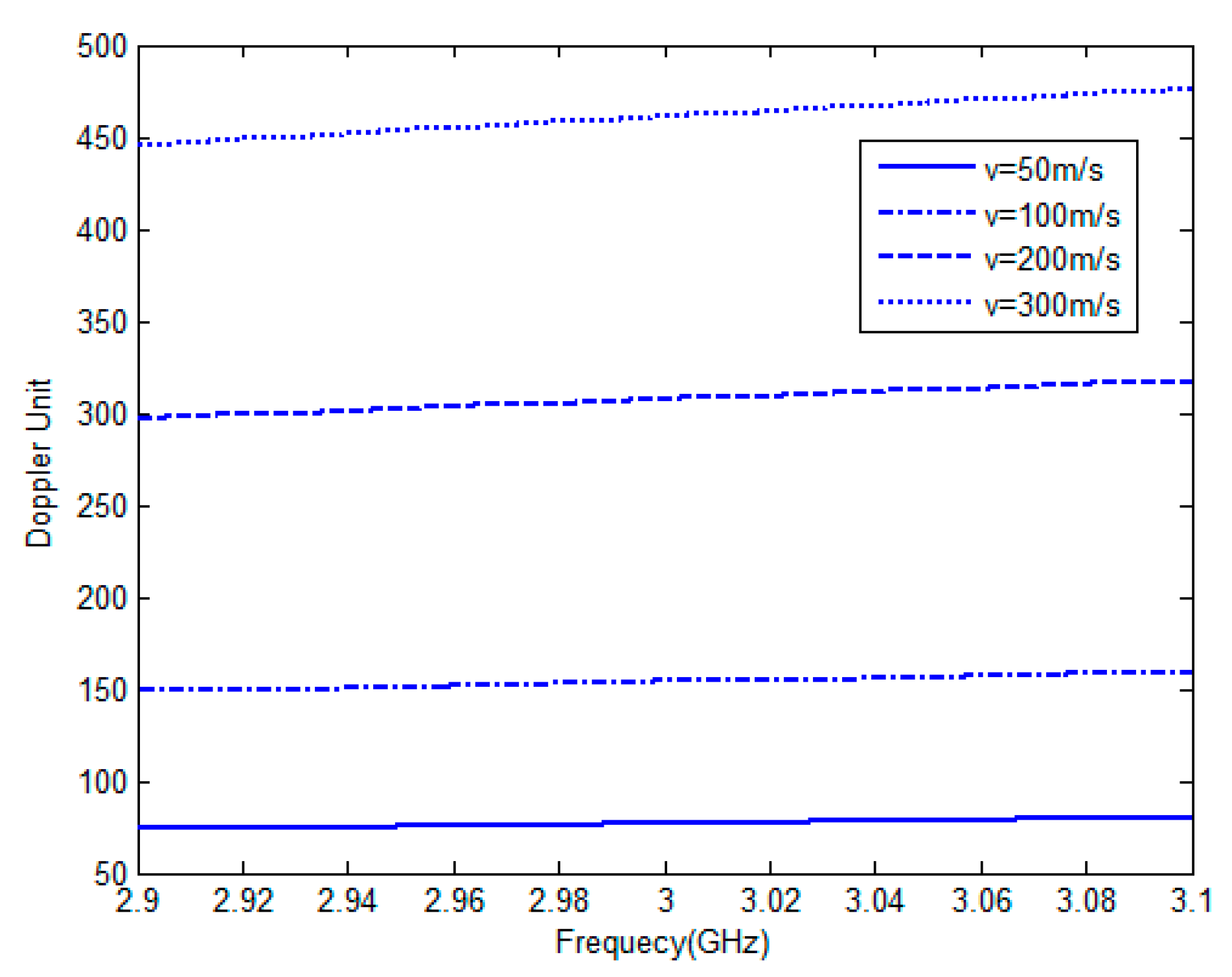
| Carrier frequency (fc) | 3.0 GHz |
| Signal bandwidth (B) | 100 MHz |
| pulse repetition interval (PRI) | 40 µs |
| Number of range units (M) | 3072 |
| Number of pulses (N) | 512 |
| Target velocity (vc) | 300 m/s |
| Parameters | Value |
|---|---|
| Carrier frequency (fc) | 10.0 GHz |
| Signal bandwidth (B) | 200 MHz |
| Pulse repetition interval (PRI) | 150 µs |
| Number of range units (M) | 2500 |
| Number of pulses (N) | 256 |
| Target velocity (vc) | 131 m/s |
| Range Resolution | Velocity Resolution | Signal-to-Noise Ratio (SNR) Comparison | ||
|---|---|---|---|---|
| Conventional FFT | Proposed Method | Improvement | ||
| 0.75 m | 0.39 m/s | 20.2 dB | 29.8 dB | 9.6 dB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; Nie, X.; Tang, L.; Bai, Y.; Zhang, X.; Li, L.; Ben, D. An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction. Electronics 2020, 9, 840. https://doi.org/10.3390/electronics9050840
Shen S, Nie X, Tang L, Bai Y, Zhang X, Li L, Ben D. An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction. Electronics. 2020; 9(5):840. https://doi.org/10.3390/electronics9050840
Chicago/Turabian StyleShen, Shijian, Xin Nie, Lan Tang, Yechao Bai, Xinggan Zhang, Lei Li, and De Ben. 2020. "An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction" Electronics 9, no. 5: 840. https://doi.org/10.3390/electronics9050840
APA StyleShen, S., Nie, X., Tang, L., Bai, Y., Zhang, X., Li, L., & Ben, D. (2020). An Improved Coherent Integration Method for Wideband Radar Based on Two-Dimensional Frequency Correction. Electronics, 9(5), 840. https://doi.org/10.3390/electronics9050840