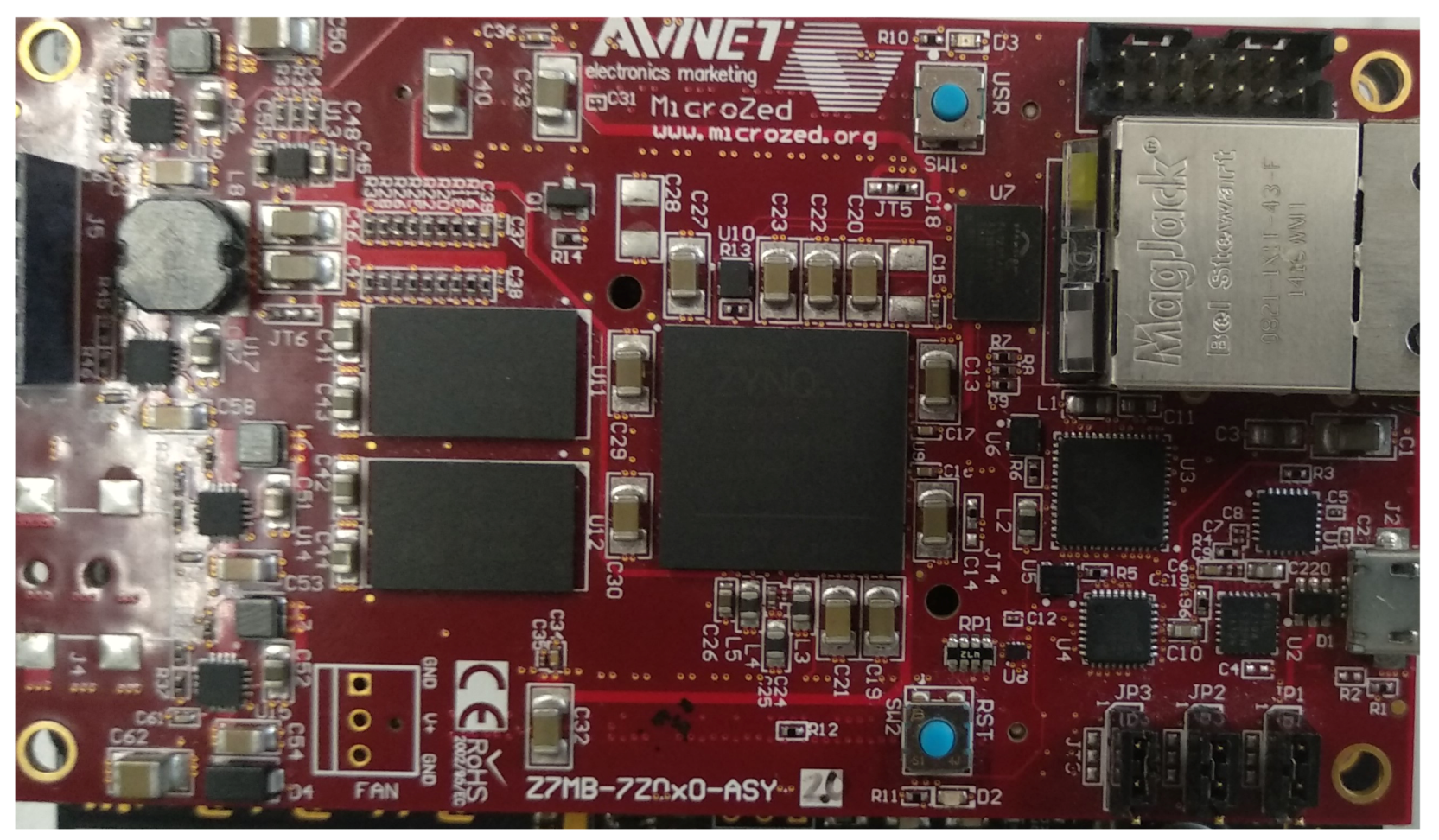
In this Results section, the feasibility of the last two proposals will be analyzed, with emphasis on the time needed to obtain the position of the emitters with respect to the detector (or vice versa). For this purpose, the L-Tek FF-LPC546xx circuit, based on an NXP Cortex M4 MCU operating at 180 MHz, will be used (
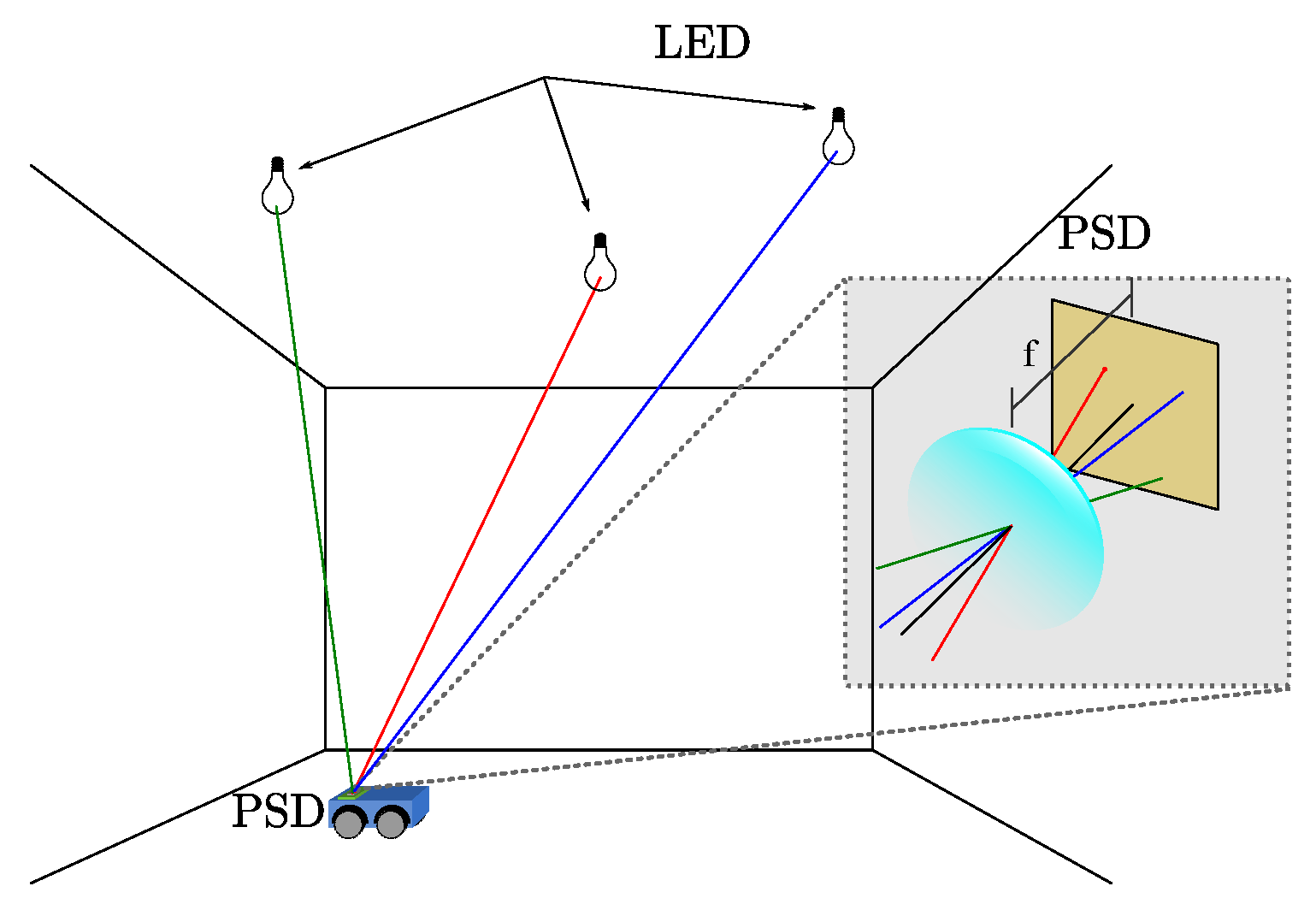
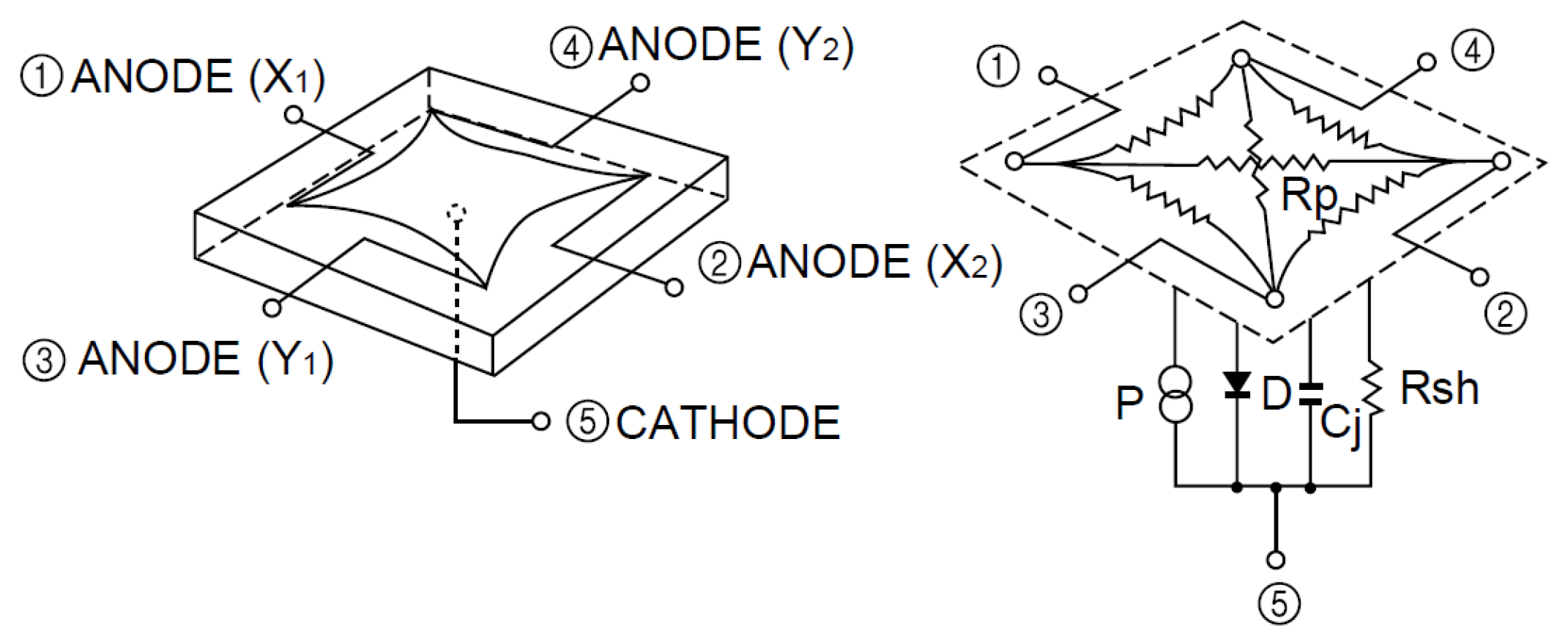
Figure 12). This device includes several ADC converters that are capable of responding to the conversion frequencies needed. Searching for an MCU with the required capabilities makes the solution to be a final application SoC for our application, reducing the necessary external hardware. For the tests, we are going to consider an IPS formed by the PSD S5991-01 from Hamamatsu Photonics (Hamamatsu, Japan) with 9 × 9 mm
area detector.
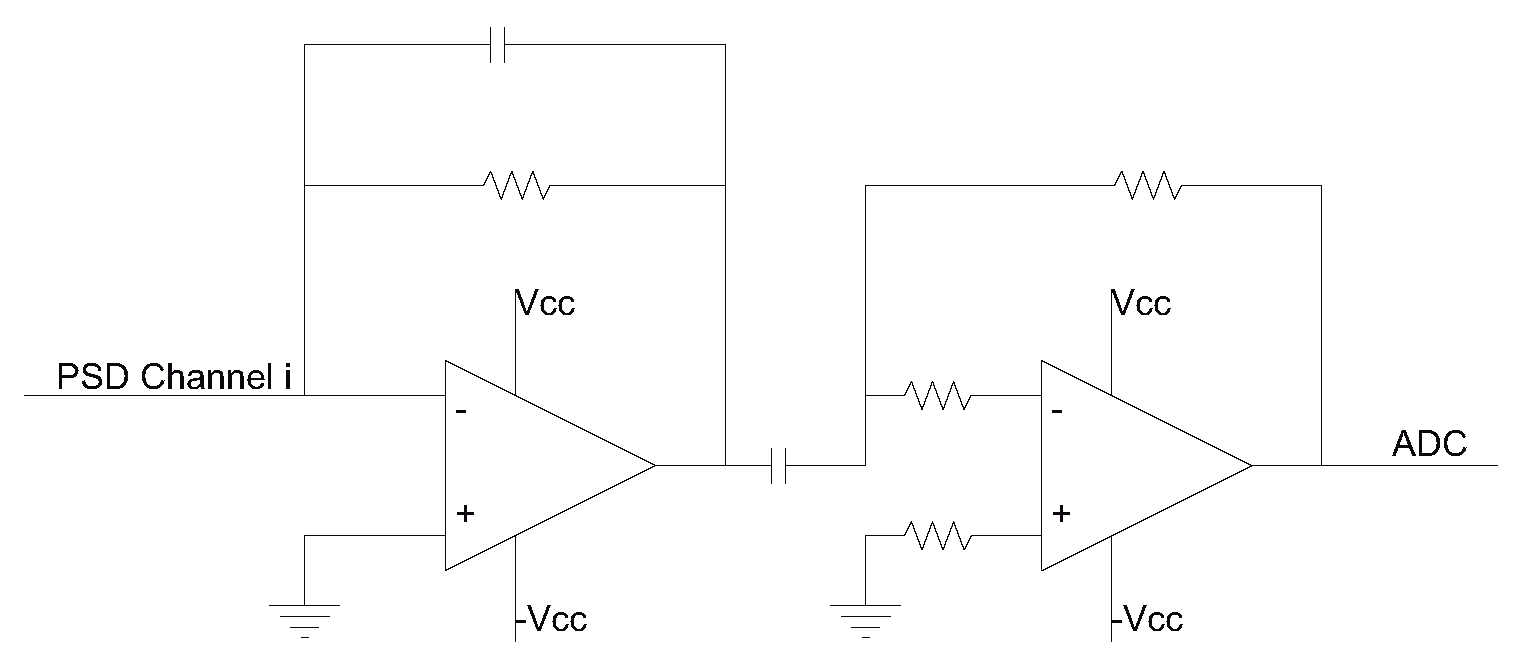
Figure 13 shows the different stages used to amplify the output signals of the PSD sensor. This modular design is done to avoid the influence of external light, as the external signal will be a continuous (or low frequency signal or noise. The first stage is configured so that the signal received at the sensor (emitted signal added to the external signal) does not saturate the output of the amplifier. In addition, a low-pass filter is implemented in this first stage to obtain a signal with the necessary bandwidth at the output. After this stage, the low-frequency components such as the signal from the sun (continuous) and the light from other sources such as fluorescent bulbs (100 Hz) are filtered. Finally, the last amplification is performed to adjust the signal to the ADC span. This avoids the possible saturation of the ADC input depending on the outside light. The
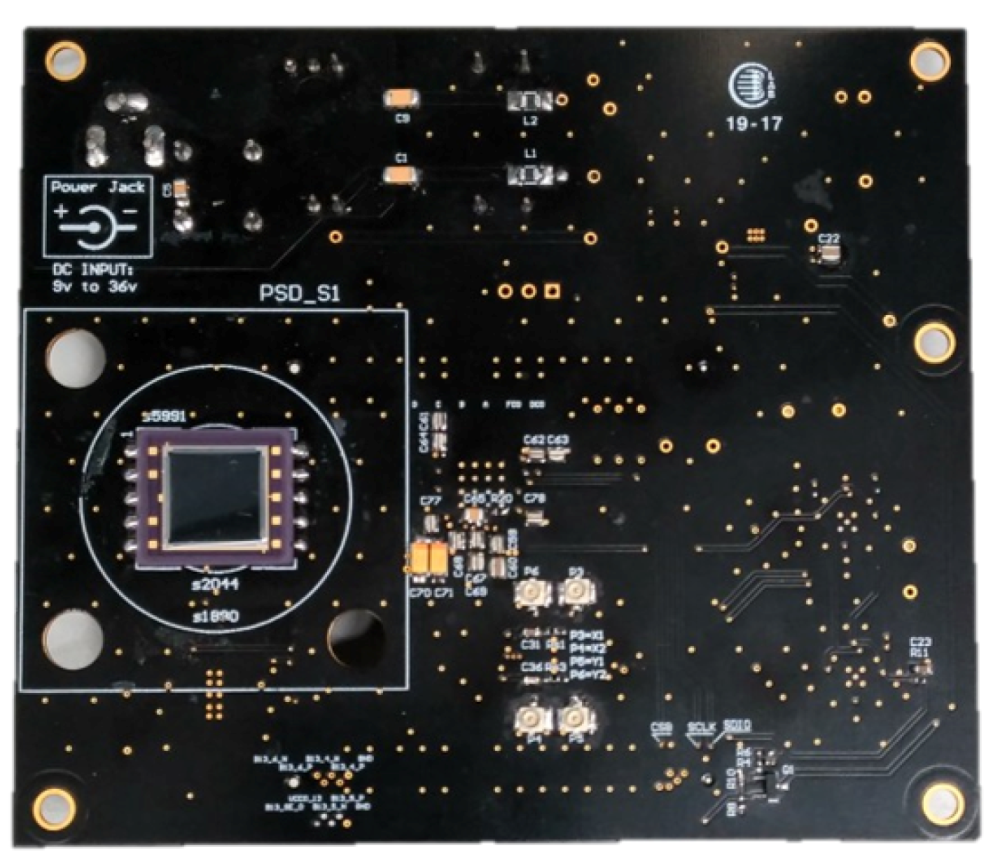
Figure 14 shows the conditioning card used in conjunction with the PSD sensor. Four modulated LED emitters with 6 kHz, 8 kHz, 10 kHz, and 14 kHz sinusoidal signals will be used. Since high modulation frequencies are used, the feeling for the user is one of continuous emission. First, the computation time of both proposals will be analyzed, and then, for the most efficient one, the positioning results will be evaluated using the indicated MCU.
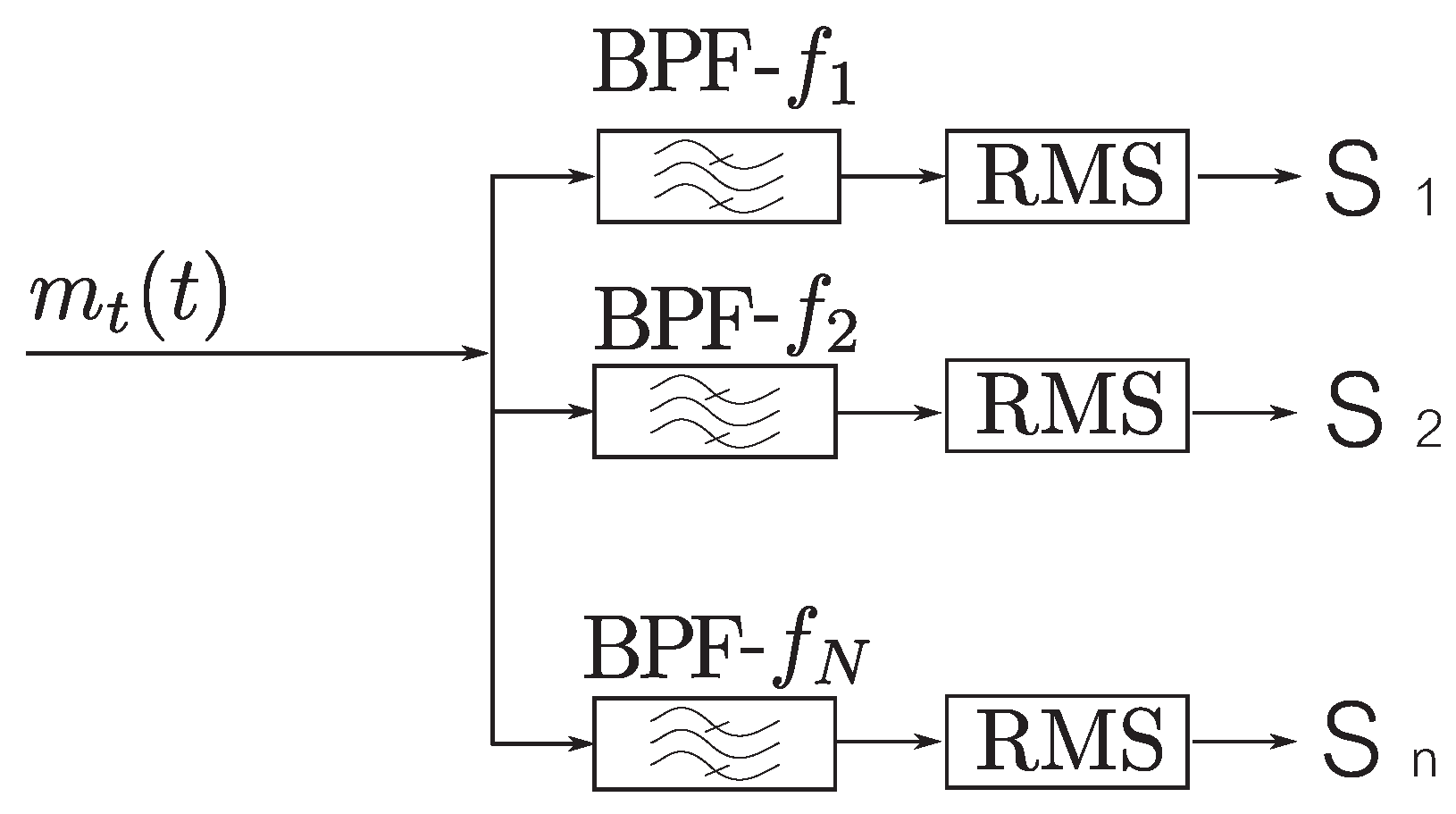
4.1. Results Using Band Pass Filters
For the implementation of FDMA using bandpass filters with an IIR structure, it is necessary to execute the IIR filter code 16 times, and perform 16 calculations of RMS values.
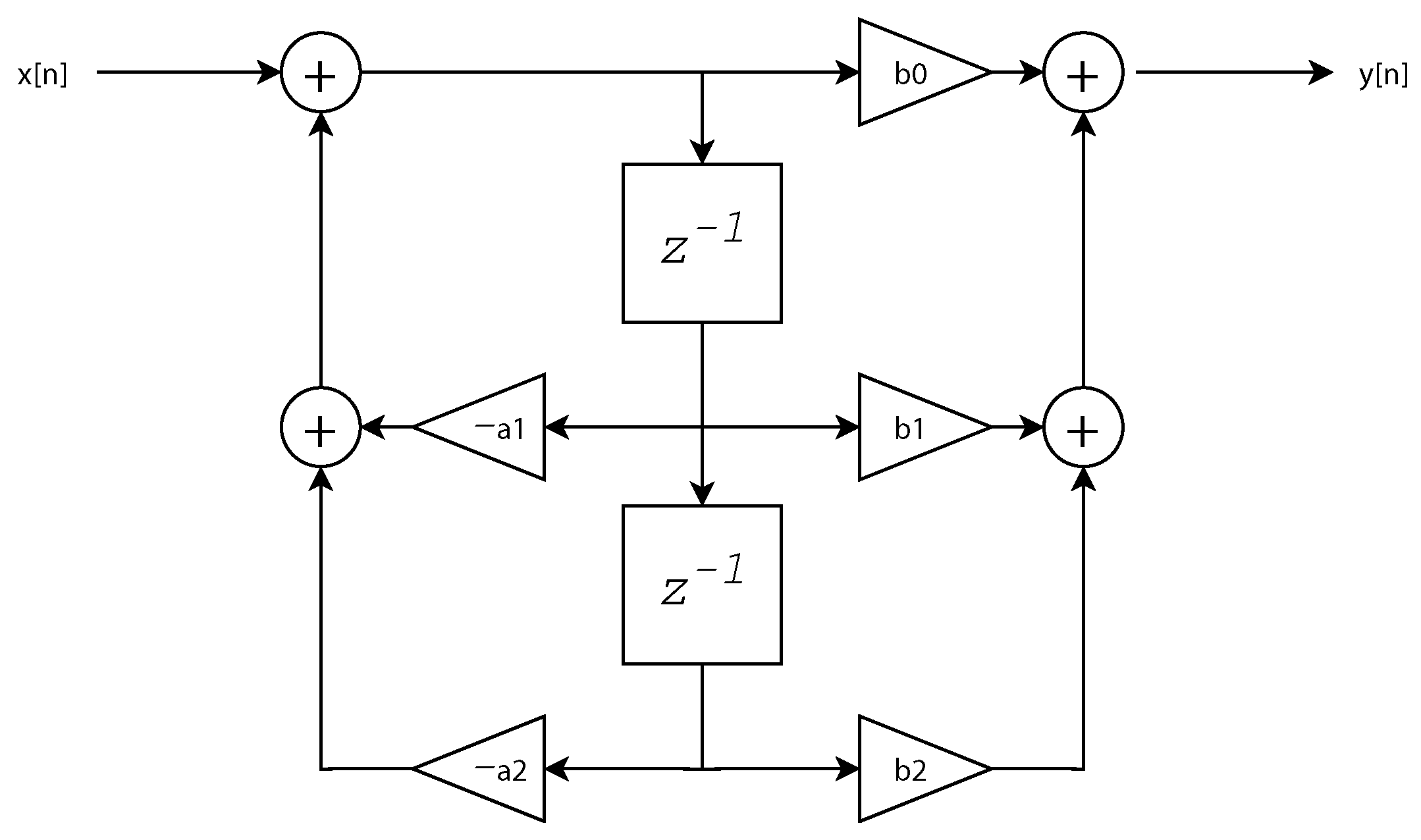
IIR filters with the direct form II structure will be used, of order 2 with 3 sections in series. This means a final filter of order 6 and therefore a delay of 6/fs.
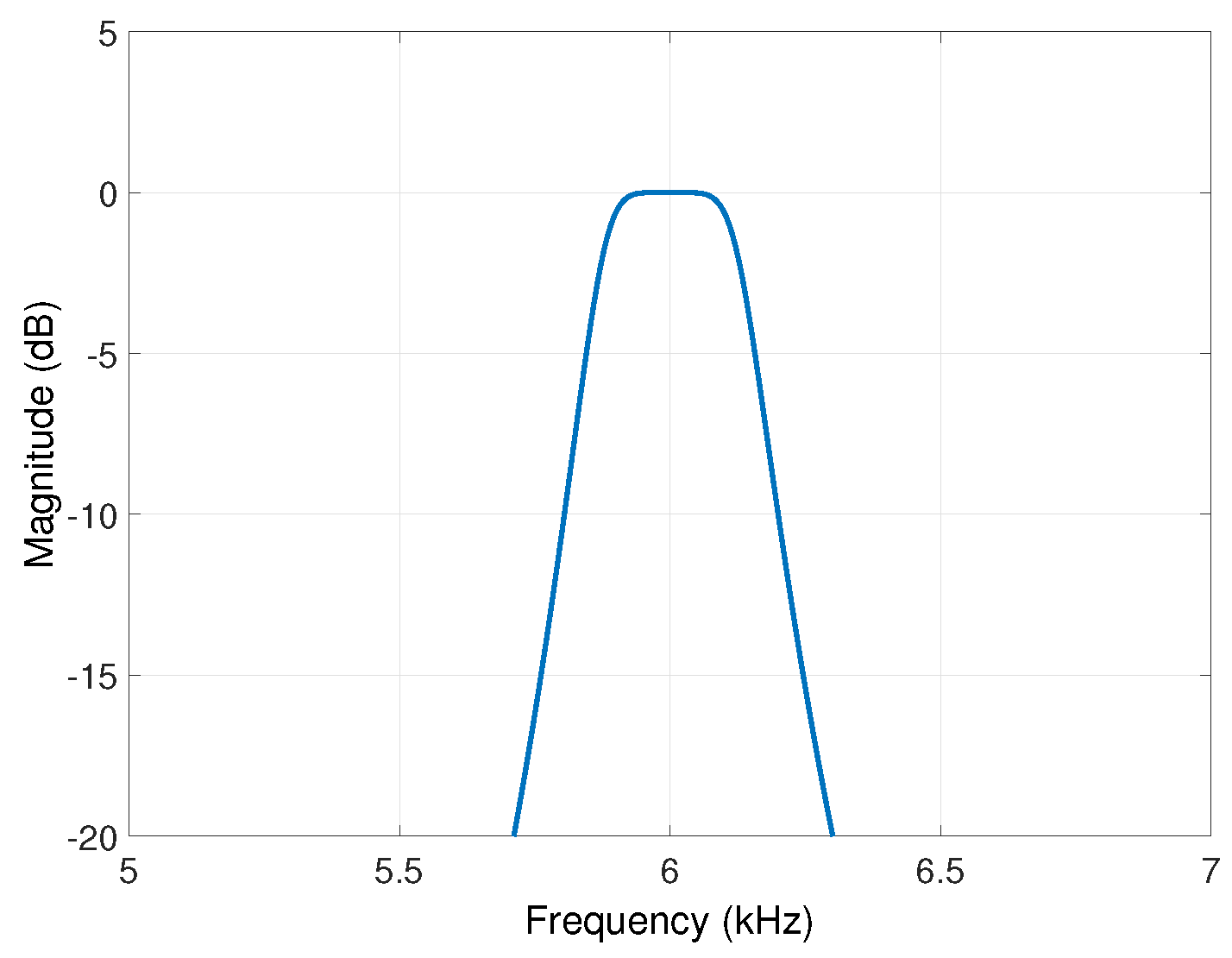
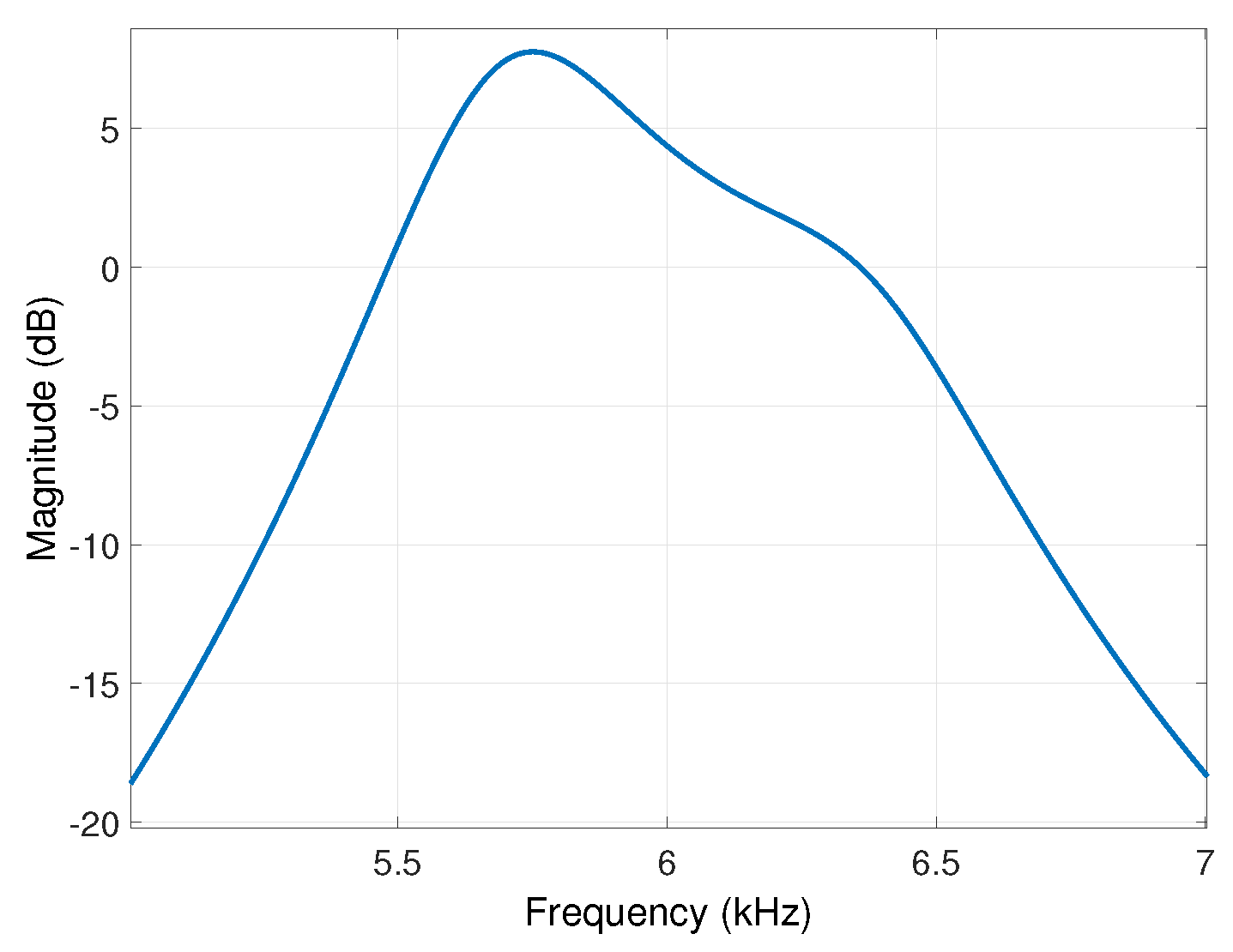
The different bandpass filters are modelled with the parameters shown in the
Table 1. From now on, when we refer to one bandpass filter, we will be chosen as an example, the filter with a 6 kHz centre frequency, as the rest of the filters have similar comments.
Using the MATLAB Filter Designer tool, we obtain the filter coefficients that, as explained in the second section, will be converted to integers by multiplying by a power factor of two so that the coefficients that are originally 1 or −1 do not represent a computational burden. These operations will be carried out using bit-shift operations, whose processing involves a single CPU clock cycle. In the examples shown below, the filter is designed for a sampling frequency of 100 kHz and centered in 6 kHz. However, it is important to emphasize that the change of these parameters does not suppose a change in the computation time (as long as it remains of the same order). Therefore the time calculated for this filter can be taken into account for other values of sampling frequencies or filtering frequencies.
To check the processing time required to carry out the filtering for a frequency, it has been programmed twice, with two different versions: one working with floating point and the other with integers. The processing times are shown in the
Table 2.
As can be seen, the time improvement when using integers power of two is very significant; it reduces time by almost 7 times. It should be noted, as indicated, that this result corresponds to a single filtering. In our case, 16 filters (4 frequencies × 4 channels) must be performed, also 16 RMS must be calculated. To calculate the total time needed, all these times must be added together. The process followed in the filtering is the next one: a window of previous samples is saved and each new sample that arrives is added to the previous ones eliminating the oldest one. In this situation, the filtering is carried out. Thus, a necessary time of 34.4
s is obtained for the 16 filtered, without taking into account the RMS calculation, or assuming that it can be done in parallel while the input signals are being sampled. Taking into account all the above, we proceed to calculate the maximum sample frequency that could be supported in the operating scheme (the system cannot support the arrival of new samples—one per channel—until it has processed the immediately previous ones).
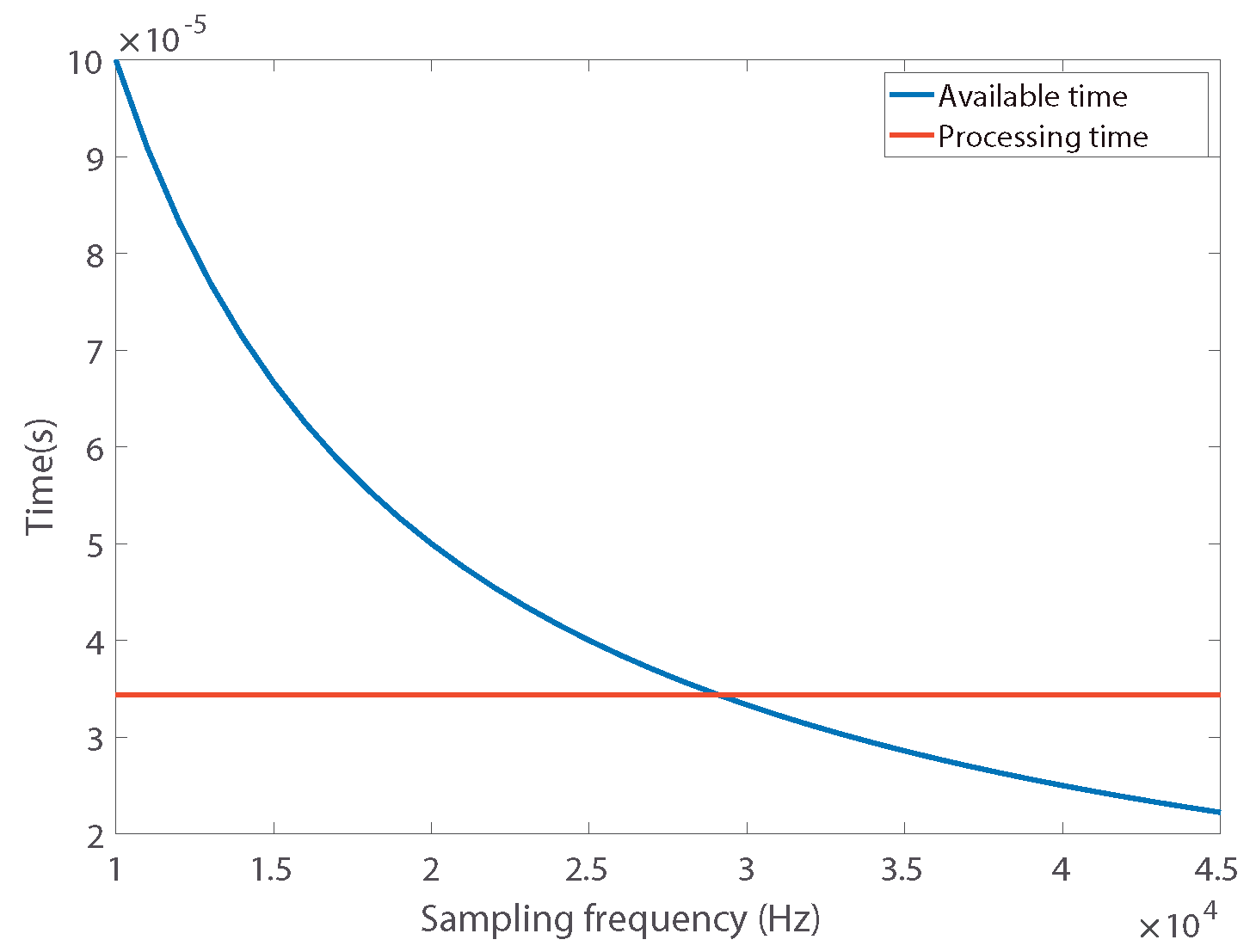
Figure 15 shows a comparison of the time needed for the filtering process (available time) and the time it would take for an acquisition system to deliver the next samples as a function of the sampling frequency. Note that the sampling frequency is limited to about 29 kHz without taking into account the RMS calculations. In this situation, for the emitter signal (14 kHz), approximately 2 samples per cycle would be available, which is clearly insufficient to be able to calculate an RMS value with guarantees in a not too high time. Consequently, this implementation proposal was discarded.
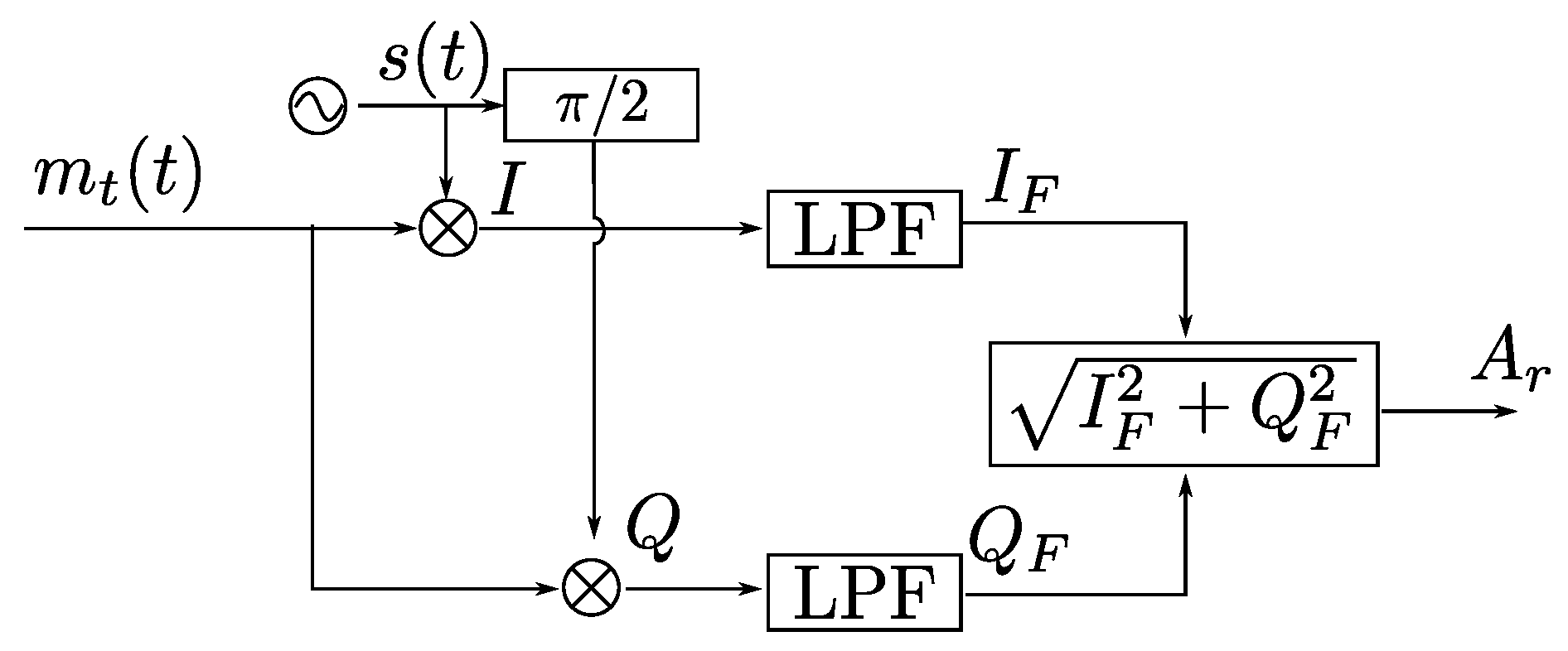
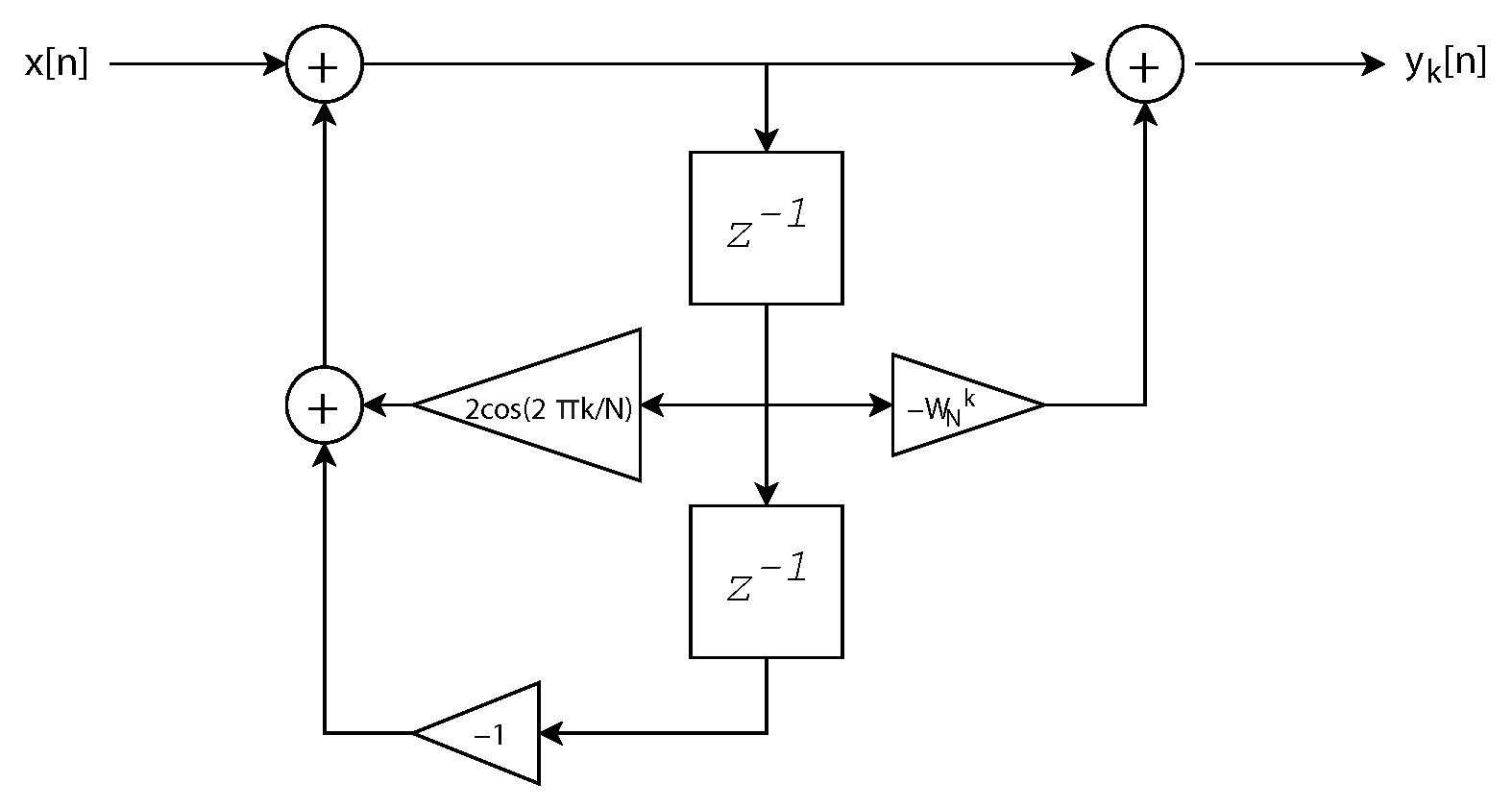
4.2. Results Using DFT
For the FDMA implementation using the Goertzel algorithm it will be necessary to run the algorithm 16 times. In this case, the algorithm will not be executed each time a sample of the signal is obtained. Instead, N consecutive samples of the signals of each PSD channel are saved and then the DFT is performed. If the operating scheme to be used is: acquire and store samples with the MCU’s internal ADC peripherals and, in parallel, process the DFT of the previous samples, the 16 executions of the algorithm must be done in a shorter time than that of the capture of the samples. In order to determine possible sampling frequencies, desirable number
N of samples and total processing times, we first calculated the time required by the Goertzel algorithm to process the DFT with different number of samples. After implementing the algorithm in the MCU, the times shown in the
Table 3 have been obtained.
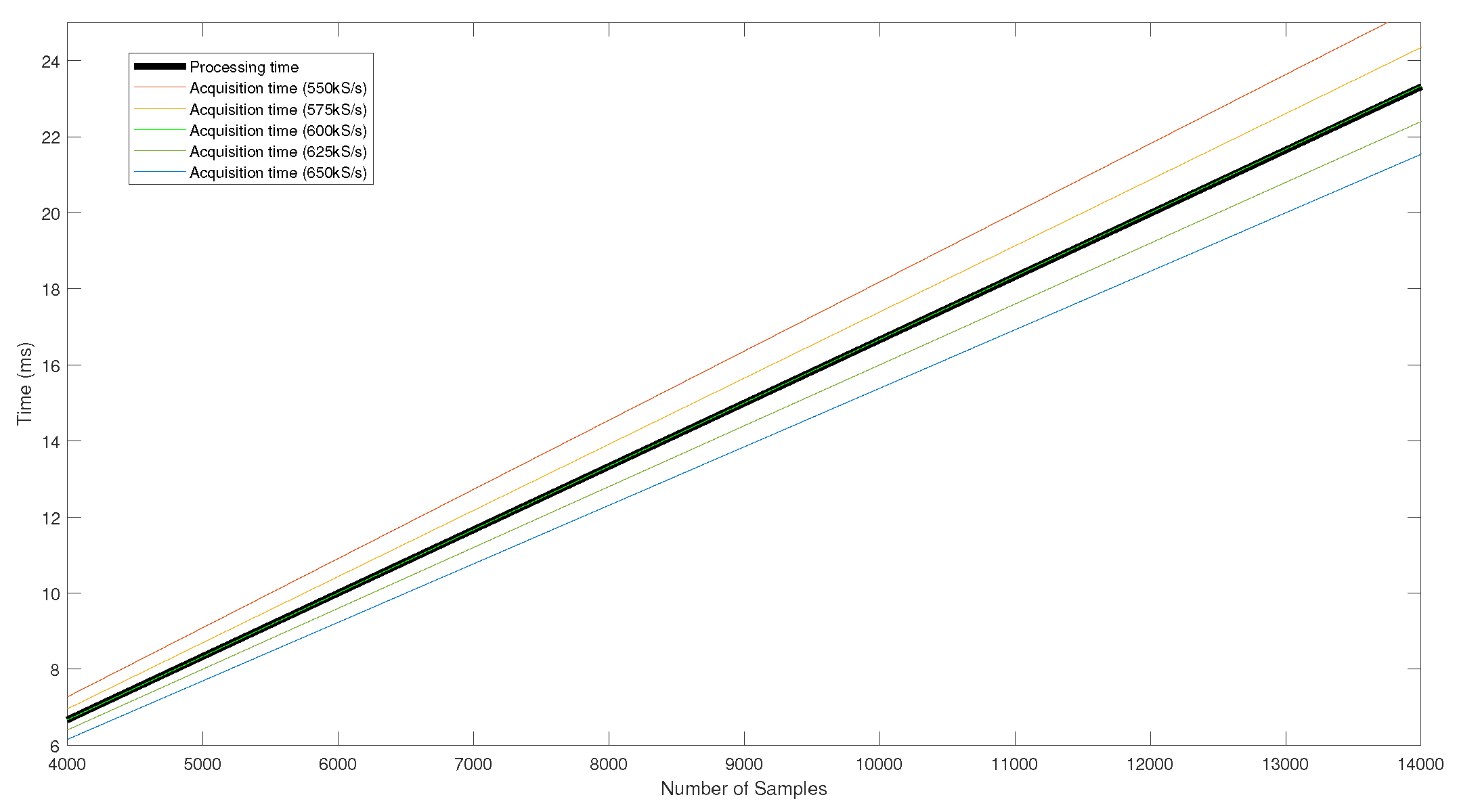
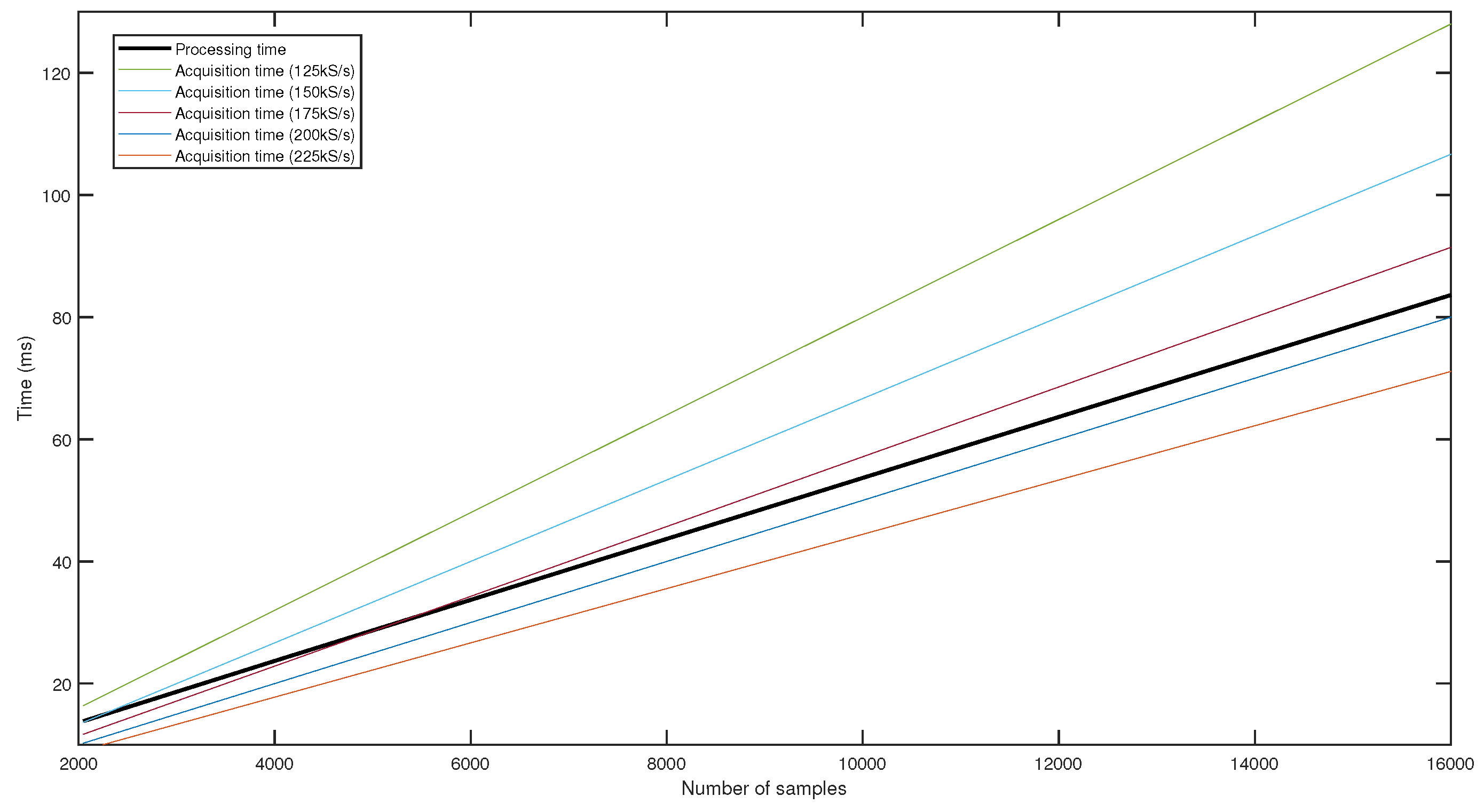
Taking into account these times and given that the algorithm needs to be processed 16 times every N samples, a graph has been made, as shown in
Figure 16, in which the time needed to acquire a certain number of samples is represented as a function of the sampling frequency used (time available to process these samples in parallel with the acquisition), and the time needed to run the algorithm 16 times with that number of samples (time needed) we see the time available as a function of the sampling frequency and the number of samples chosen. This graph shows the sample frequency and number of samples that will be useful in parallel processing, where the CPU processes the data while the peripherals acquire the signals. In any case, the acquisition time has to be less than the processing time for correct execution.
Figure 16 reflects that there is more than enough time to process the samples while capturing the next ones. When determining the number of samples to be used and the sampling frequency, it should be kept in mind that if few samples are used, the result of the algorithm when calculating the DFT will be worse; in addition, less time will be available for the calculation of RMS values, the determination of the positioning point and the communication of results. On the other hand, if the number of samples is increased, the number of times per sample that the position can be calculated is reduced. A compromise solution will have to be reached that provides good results and an acceptable computation time (if, for example, it were decided to sample at 250 kHz each channel, using 8192 samples for each DFT calculation, more than 25.0
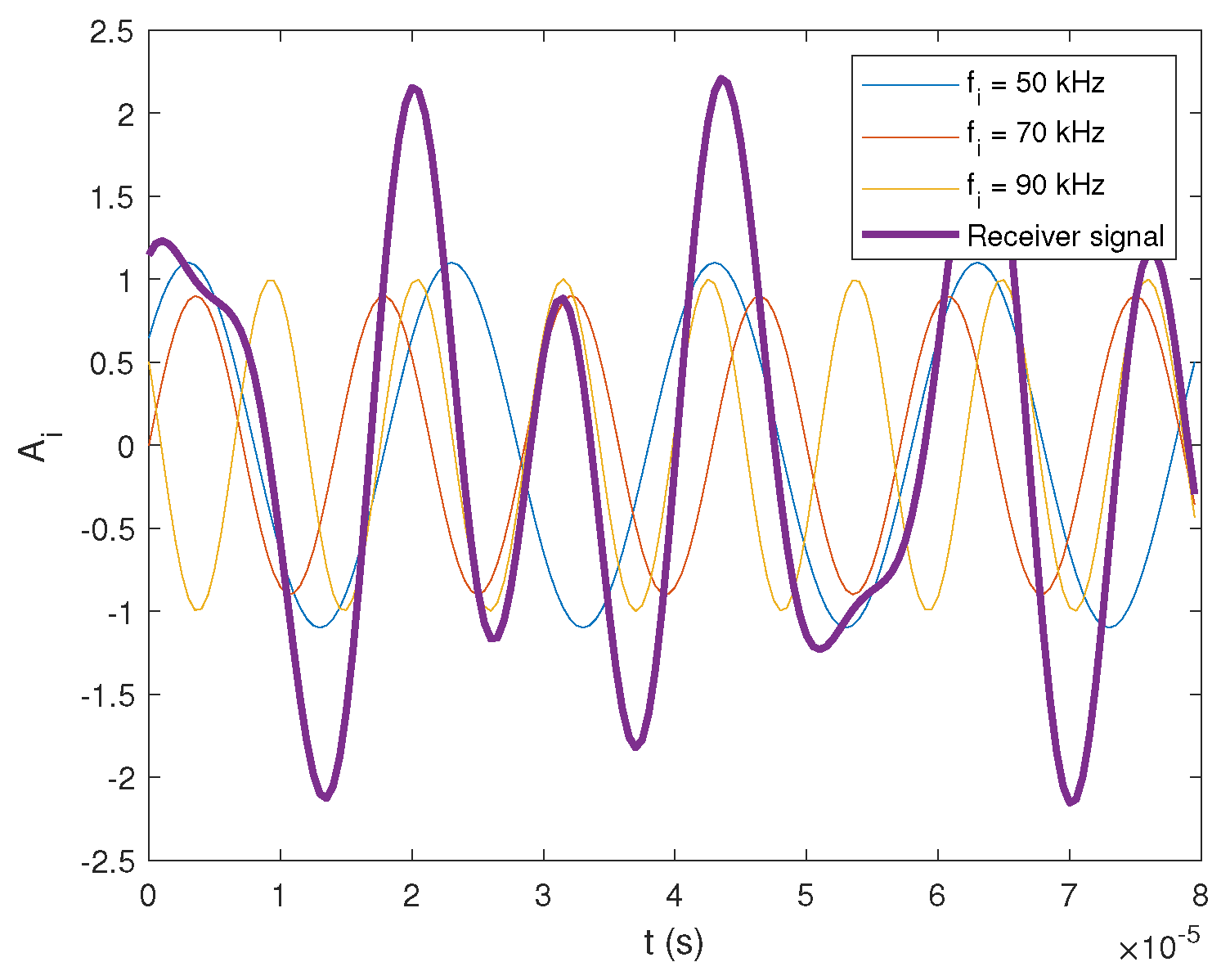
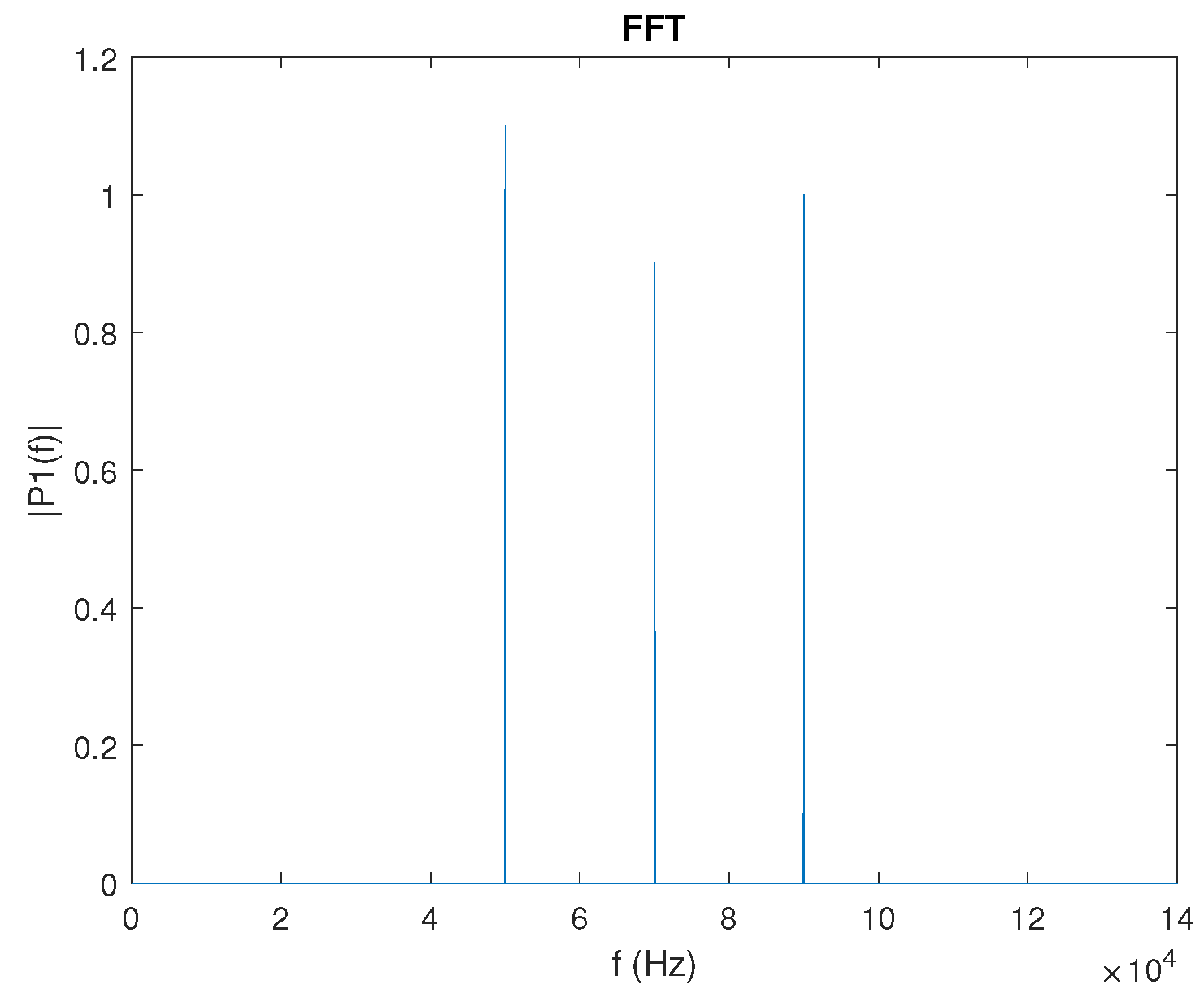
s would be available to process the results and report them). With the system already implemented, tests are performed considering synthetic data. For this purpose, two Tektronix AFG 3022B signal generators are used, introducing the signals that correspond to the signals that would be obtained with the positions of the emitters detailed in the
Table 4. The signal generators and the signals used can be seen in the
Figure 17.
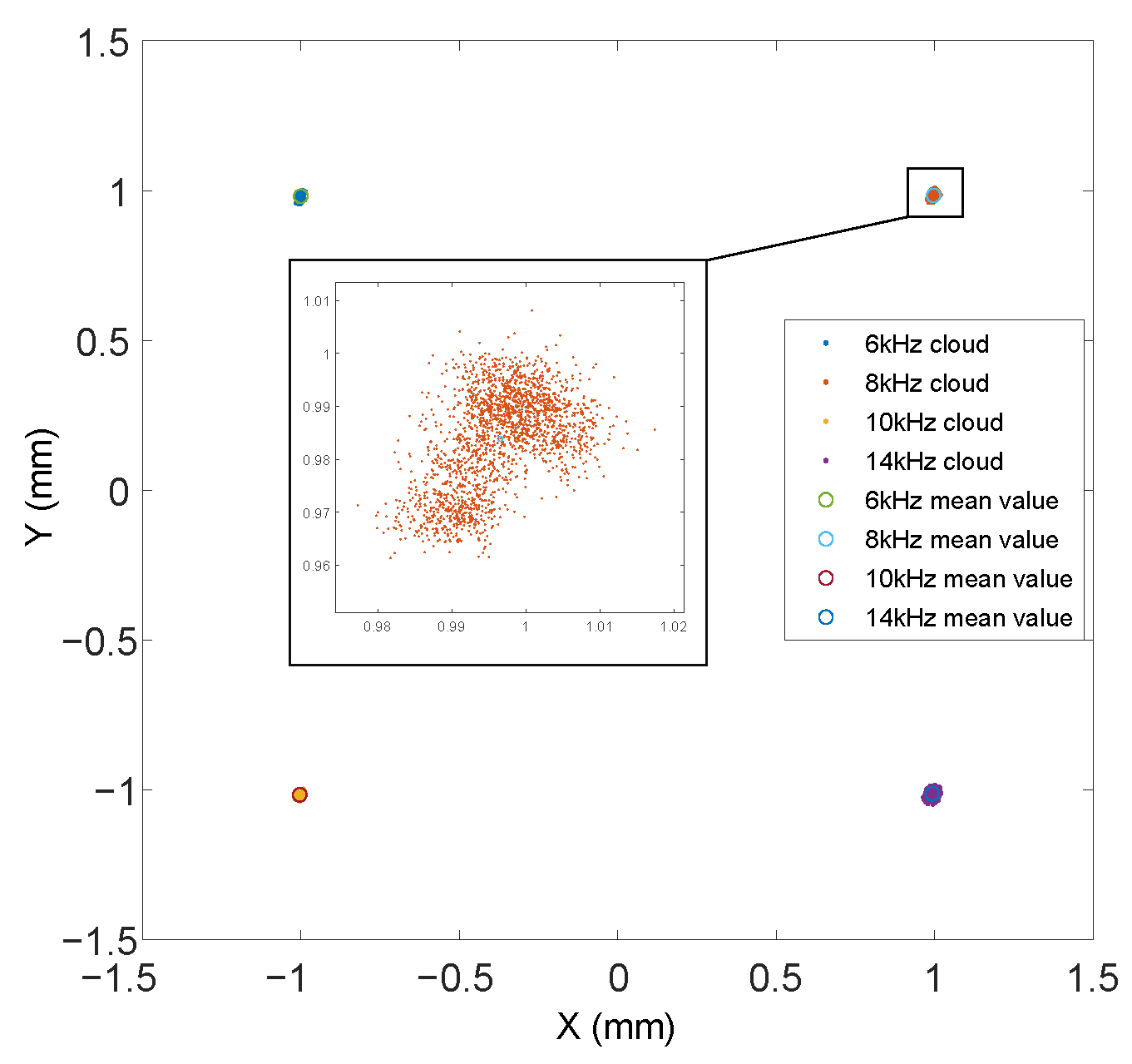
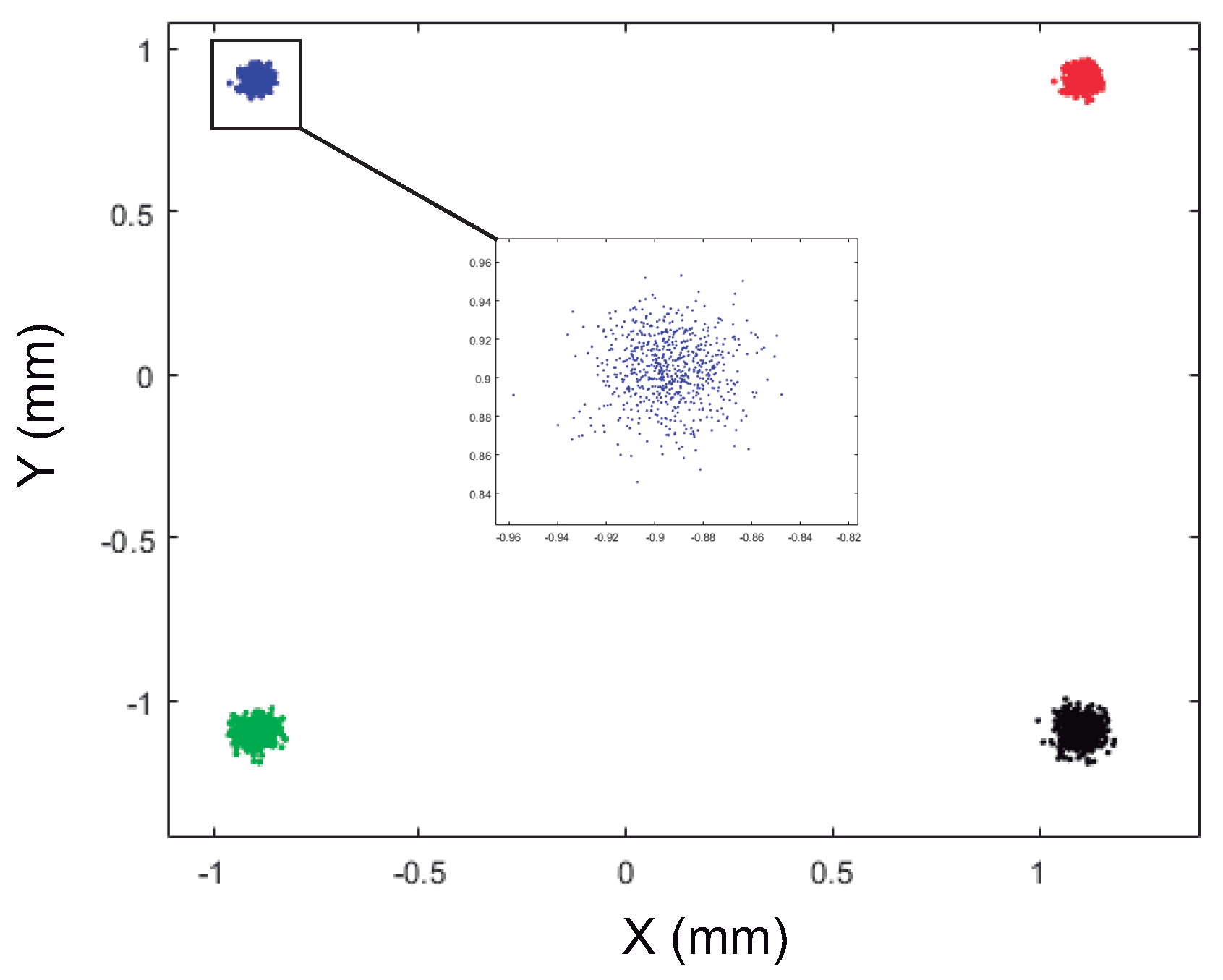
The different tests detailed below are carried out considering different numbers of samples and sampling frequencies. The first results obtained are from a test that considers 9000 samples. The process of calculating the point of impact of the different signals on the PSD surface is repeated 2000 times for each emitter in order to obtain reliable statistical results (
Figure 18). The cloud of points with the worst stability is zoomed for a better visualization in
Figure 18). The zoomed cloud of points illustrates correctly the problem that later is solved in the paper.
As can be seen in the enlargement of one of the areas in the
Figure 18, the point cloud is not centred around a specific value, there are several areas of point concentration. This is due to the fact that in the calculation of the signal value for that frequency in the different channels, only one DFT value has been used, obtained through Goertzel’s algorithm. And since it is a discrete system, the noises can cause instabilities and part of the values that should coincide in a sample have been derived to the previous or subsequent one. Therefore, it will be necessary to process also the samples before and after the one corresponding to the searched frequency. A different scenario is proposed when making this proposal; now the algorithm would need to be processed in 48 times instead of 16. This makes impossible the use of high sampling frequencies that allow many measurements per second and acquire an optimus samples per cycle for DFT calcultion (
Figure 19). This graph (as
Figure 16) shows the sample frequency and number of samples that will be useful in parallel processing, where the CPU processes the data while the peripherals acquire the signals.
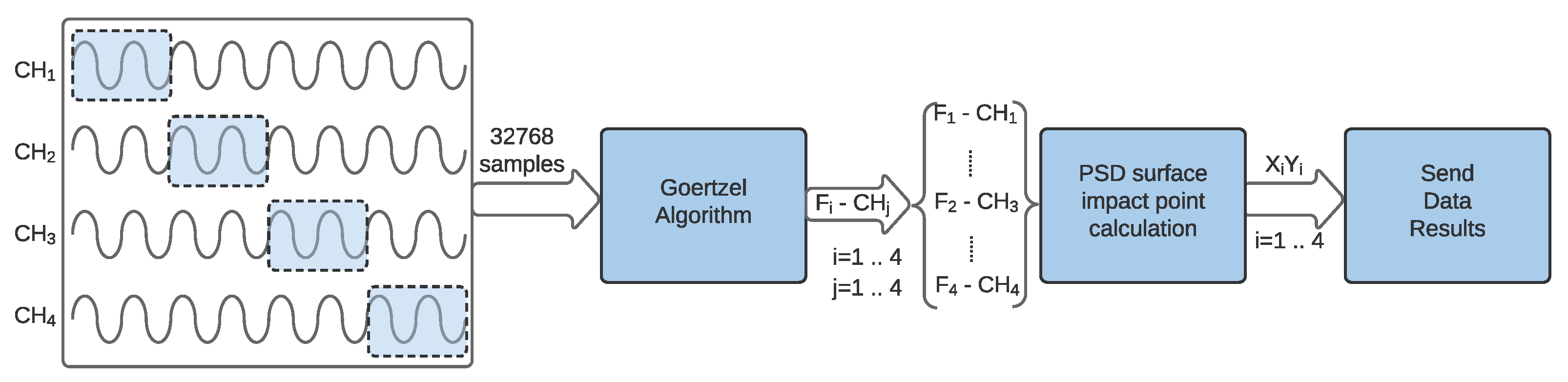
Therefore, it is decided to change the approach and perform a sequential execution obtaining samples and then processing them; and once the complete cycle is finished, launch the sample acquisition again, and so forth. This would allow to increase the sampling frequency, obtaining cleaner signals and favoring the accuracy of the algorithm. This execution process is detailed on
Figure 20, where
correspond to the different output channels of the PSD and
the frecuency of each emitter.
With this new proposal, the sampling frequency has been increased to 1.8 MHz. 8192 samples per channel are obtained (a total of 4 × 16,384 = 32,768 samples) in an acquisition time of approximately 19 ms. After the acquisition of samples, the process time is carried out obtaining the times shown in the
Table 5. To improve the determination of the positioning point it is decided to make an average of the last 5 points calculated.
Adding up the times obtained in the different phases of the process. The total time of the process is calculated, which is 66.8 ms. This time allows to get the position 15 times per second, which for the most common applications, where the speed of movement is not very high, is enough.
At this point, the tests are repeated considering the same scenario of the previously performed ones, and the results shown in the
Figure 21 are obtained.
It can be seen that the point cloud is now centred on a single point, this result is more reliable despite having a greater dispersion.
The
Table 6 shows the error of the value obtained from the centre of the point cloud with respect to the synthetic value entered. This error could be solved with an electrical calibration since they are systematic errors [
20,
21]. Concerning the random errors, the point cloud presents maximum deviations of the order of 50.0
m on the surface of the PSD. However, it can be seen in the
Figure 21 that the majority of points are concentrated near the mean value, confirming this with the standard deviation values shown in the
Table 7 which in no case exceed 30
m on the surface of the PSD.
These results should be extrapolated from the surface of the PSD, to space position results in the IPS with the Equation (
6), which relates increases in (x,y) to increases in (X,Y).
where (X,Y) are the position in space and H the height at which the emitters are placed to the motion plane. In this way, it can be shown with the standard deviation that in 67% of the points the error of 3D emitter position, in the IPS covering an area of 3.5 × 3.5 m is less than 1.31 cm. This result could be improved by averaging results, making use of the previous Goertzel results, and introducing to the calculation of the position an average of the previous
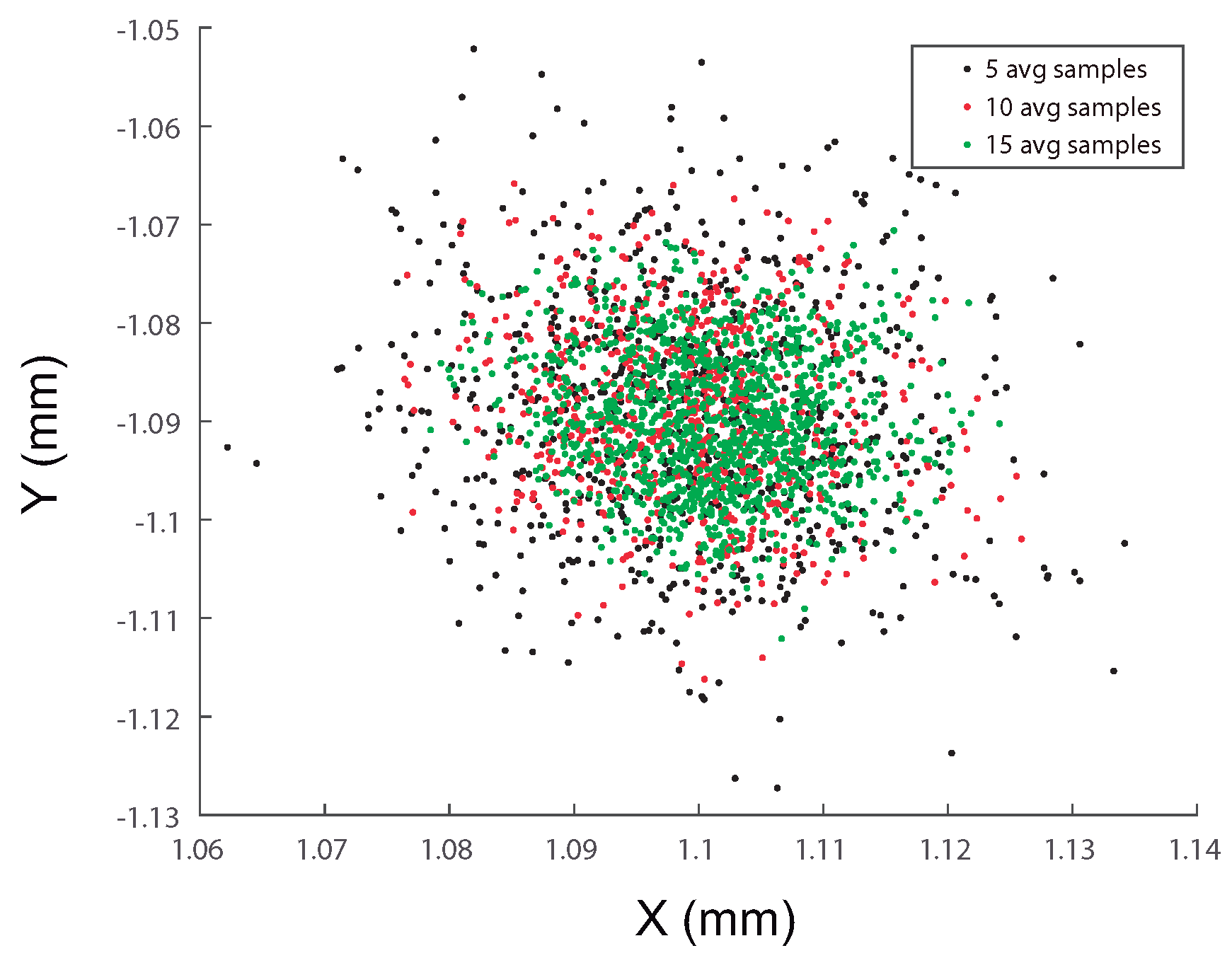
results and the current one. The viability of this solution will depend on the speed of the agent whose position is to be calculated. Performing this averaging, the results shown in the
Table 8 and the
Figure 22 are obtained. These values have been obtained for the 14 kHz emitter, which is the one with the worst results.
It is observed that the difference between making an average or not is significant. Not so much the number of measures used, since for 5 samples we obtain good error results, but the fact of making this improvement. Bearing in mind that, as we saw in the
Table 5 it does not suppose a relevant increase in the computation time, it is of interest to evaluate the possibility of applying the averaging taking into account that in moving agents it can suppose an increase of the error, depending on the speed of the movement.
It is important to note that the errors described here are due only to the treatment and processing of the signals in a microcontroller. These errors should be added to the errors of the positioning system. The positioning system together with the positioning errors according to different parameters is shown in References [
16,
25]. In which you can see the errors in real environments under both static and dynamic conditions, obtaining positioning errors below 1 cm.
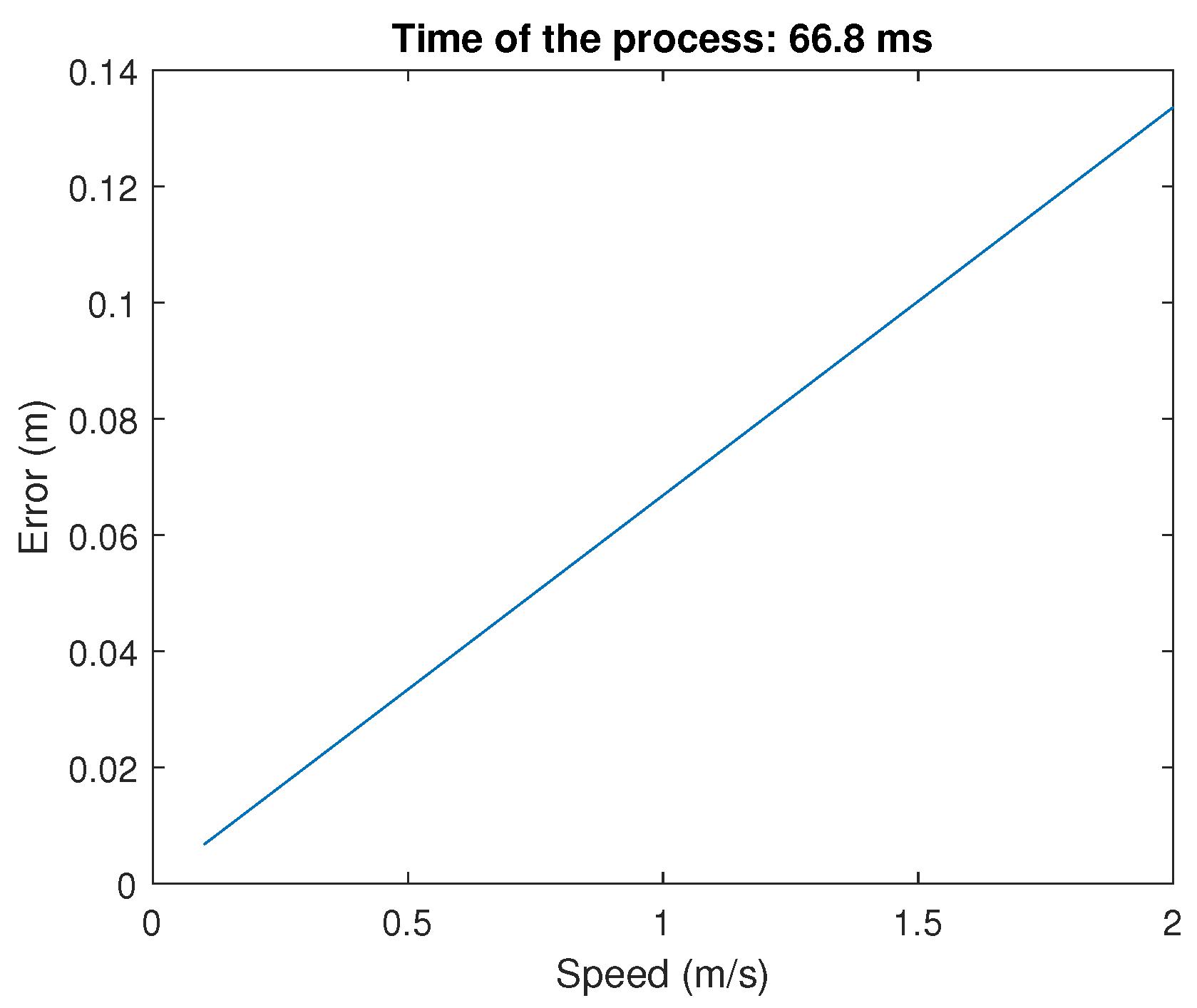
In addition to these errors, it is necessary to analyze the error of position determination in dynamic environments. Let us assume that the receiver is moving. As the execution time of the algorithm can not be considered zero, there will be an error in the determination of the position of the agent.
Figure 23 shows the maximum error in positioning as a function of the mobile speed.
In the same way, an error will occur in the measurement of the rotation of the mobile depending on its angular speed.
Another aspect to consider is the focal length chosen for the lens system. The shorter the focal length, the greater the FoV and therefore the coverage. The further the emitter is from the receiver, the worse the SNR of the received signal in the receiver and therefore the measurement accuracy will worsen. In Reference [
20] you can find information on how the SNR varies depending on—the focal length of the lenses, the distance between the transmitter and the receiver, the angle between them, and so forth.

 ,
, 


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}