The Need for Cooperative Automated Driving


Abstract
1. Motivation
2. Cooperation and Social Dilemmas in Multi Agent Systems
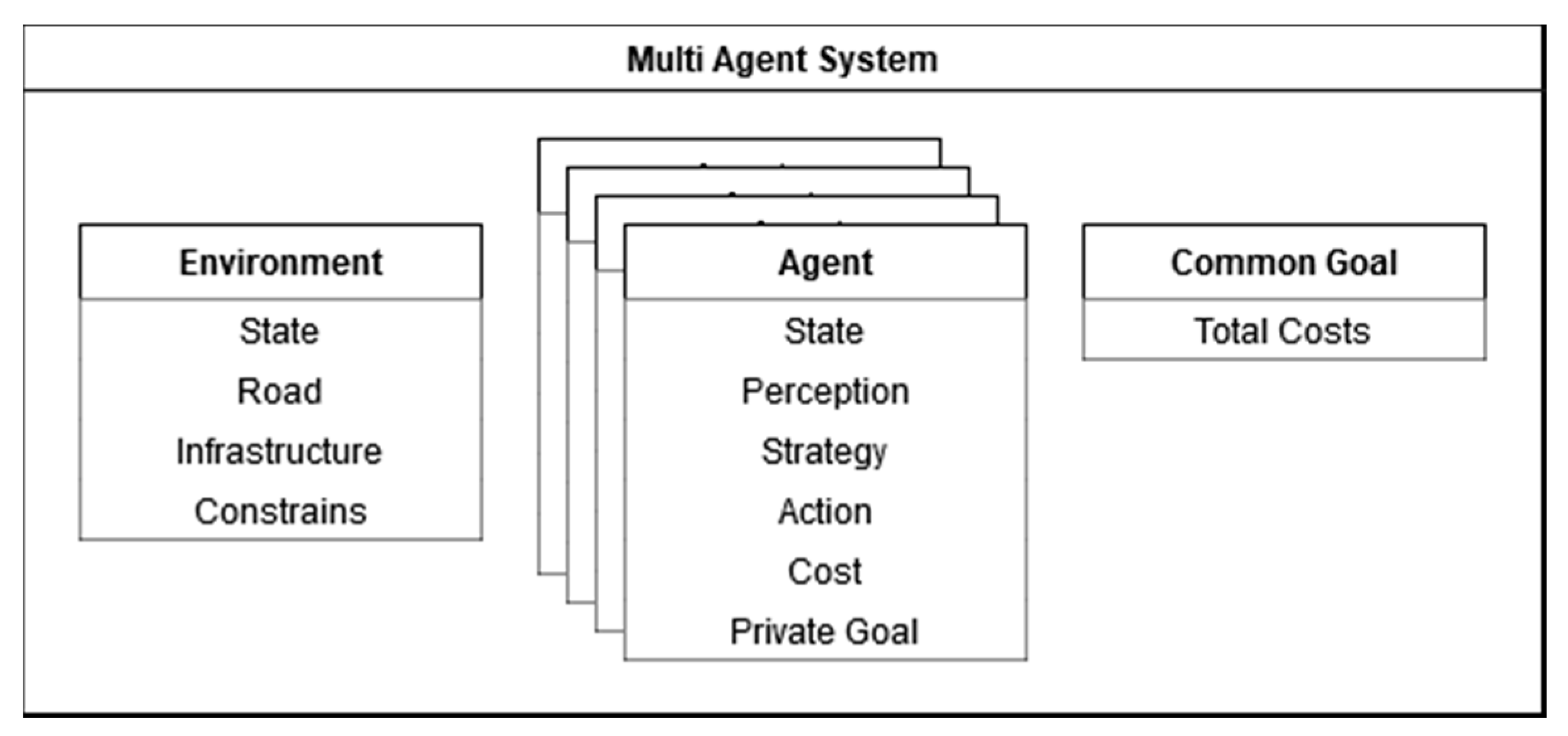
2.1. Multi-Agent System
- State: Properties of an agent including the action history. Can be constant or dynamic (e.g., vehicle length = 3 m, velocity = 80 km/h).
- Perception (Sense): Ability to sense the surroundings or just parts of it. Might be noisy (e.g., a radar detecting an object or a communication module receiving a message).
- Strategy (Plan): Decides which action is executed to reach the goal (e.g., to reach the desired speed the first action could be to accelerate).
- Action (Act): The agent’s capability to influence its own or other states for a certain cost (e.g., accelerating and breaking or sending a message).
- Costs: The sum of all costs generated by the performed actions (e.g., fuel consumption and travel time).
- Private Goal: A certain amount of cost to the agent that should not be exceeded (e.g., arrival time within 2 h).
- State: Properties of the environment (e.g., the weather conditions).
- Road: The drivable area on which the agents can move (e.g., two lanes).
- Infrastructure: Elements to support the agents with information (e.g., traffic lights).
- Constraints: Limitation of the agent´s action scope (e.g., the road traffic regulations.
- Agents: An arbitrary number of entities performing actions and creating costs (e.g., traffic participants such as cars, trucks, and pedestrians).
- Environment: One shared environment that allows the agents to interact (e.g., the road network in which the agents are located).
- Common Goal: The summed agent’s cost within the MAS that should be optimized. Might conflict with the private goals of the agents (e.g., zero fatalities and low CO₂ emissions).
2.2. Cooperation
- Mutualism: An agent interacts in such a way that the costs of all involved agents are reduced.
- Altruism: An agent interacts in such a way that his/her own costs increase while the costs of other agents are reduced.
- Selfishness: An agent interacts in a way that his/her own costs are reduced while the costs of other agents increase.
- Spite: An agent interacts such in a way that the costs of all involved agents increase.
2.3. Social Dilemma
- Each individual is sometimes tempted to defect (e.g., for lower costs in the short-term).
- Collective defection leads to higher cost than collective cooperation.
3. Cooperation in Road Traffic
3.1. Characteristics of Cooperation
3.1.1. Agents Involved
3.1.2. Location
3.1.3. Urgency and Costs
3.1.4. Interaction Type
3.1.5. Duration
3.1.6. Mutuality
3.1.7. Preparation Time
3.1.8. Initiation
3.2. Examples of Cooperative Situations
3.2.1. Platooning
3.2.2. Lane Merge
3.2.3. Truck Overtaking
4. Implementation of Cooperation
4.1. Characteristics of the Cooperation Implementation
4.1.1. Planning Level
4.1.2. Communication
4.1.3. Maneuver Planning
4.2. Cooperation in Nature
- Separation: “avoid crowding neighbors (short-range repulsion)”
- Alignment: “steer towards the average heading of neighbors”
- Cohesion: “steer towards the average position of neighbors (long-range attraction)”
4.3. Human Cooperation in Road Traffic
- Planning level: Cooperation is planned in a decentralized manner, partly with but mainly without coordination. This means that each driver executes what he/she considers as the appropriate action, but usually does not discuss this with the other vehicles.
- Communication: Communication can take place explicitly via horns, light signals, or gestures, but also implicitly via the driver’s own behavior. By proactively changing to the left lane in front of an on-ramp, for example, it can be signaled that the resulting gap can be used for the drive on. However, it is not possible to transmit complex plans.
- Maneuver planning: The maneuver is planned in each vehicle itself, based on the experience and intuition of the driver.
- Involved agents: As the complexity increases with the number of participants, usually only two vehicles are involved in the cooperation between human drivers.
- Location: Since no infrastructure is required, the cooperation is largely location-independent.
- Urgency and costs: The urgency and costs can only be roughly estimated based on the driver’s experience.
- Interaction type: Due to limited communication, little information can be exchanged and the majority of actions are active and have a direct influence on the traffic situation.
- Duration: Due to limited communication, an agreement for a long time is not possible and cooperative maneuvers are limited to short moments.
- Mutuality: This is strongly dependent on the attitude of the drivers, whereby there are drivers who act altruistically, mutually, or selfishly.
- Preparation time: In most cases, cooperation occurs spontaneously. Far-in-advance planned cooperation can only occur among drivers who have the possibility of prior agreement. An example would be a joint holiday trip involving two vehicles, one of which drives ahead to show the way and the other follows.
- Initiation: Both the profiteer and the grantor can initiate the cooperation. When driving on the freeway, the cooperation can be offered by the grantor on the freeway through a proactive lane change, and the profiteer can request cooperation through the turn signal or force the cooperation by changing lanes on the freeway himself.
5. Cooperation for Automated Vehicles
5.1. Planning Level
5.2. Communication
5.3. Maneuver Planning
6. Problems and Challenges
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- German Law. German Road Traffic Regulations. Available online: https://germanlawarchive.iuscomp.org/?p=1290 (accessed on 14 April 2020).
- Festag, A. Standards for vehicular communication—From IEEE 802.11p to 5G. Fest-VehicularCom-15. Elektrotech. Inftech. 2015, 132, 409–416. [Google Scholar] [CrossRef]
- Fekete, S.; Vollrath, M.; Huemer, A.K.; Salchow, C. Interaktion im Straßenverkehr: Kooperation und Konflikt. 8. Vdi-Tag. Der Fahr. Im 21. Jhd. Fahr. Fahrunterstützung Und Bedien. 2015, 2264, 325–338. [Google Scholar]
- Belbachir, A.; Fallah-Seghrouchni, A.E.; Casals, A.; Pasin, M. Smart Mobility Using Multi-Agent System. Procedia Comput. Sci. 2019, 151, 447–454. [Google Scholar] [CrossRef]
- During, M.; Lemmer, K. Cooperative Maneuver Planning for Cooperative Driving. IEEE Intell. Transp. Syst. Mag. 2016, 8, 8–22. [Google Scholar] [CrossRef]
- Dorri, A.; Kanhere, S.S.; Jurdak, R. Multi-Agent Systems: A Survey. IEEE Access 2018, 6, 28573–28593. [Google Scholar] [CrossRef]
- Khamis, A.M.; Kamel, M.S.; Salichs, M.A. Cooperation: Concepts and General Typology. In Proceedings of the 2006 IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 1499–1505, ISBN 1-4244-0099-6. [Google Scholar]
- van Lange, P.A.M.; Joireman, J.; Parks, C.D.; van Dijk, E. The psychology of social dilemmas: A review. Organ. Behav. Hum. Decis. Process. 2013, 120, 125–141. [Google Scholar] [CrossRef]
- Rand, D.G.; Nowak, M.A. Human cooperation. Trends Cognit. Sci. (Regul. Ed) 2013, 17, 413–425. [Google Scholar] [CrossRef] [PubMed]
- Fank, J.; Santen, L.; Knies, C.; Diermeyer, F. “Should We Allow Him to Pass?” Increasing Cooperation Between Truck Drivers Using Anthropomorphism. In Advances in Human Factors of Transportation; Stanton, N., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 475–484. ISBN 978-3-030-20502-7. [Google Scholar]
- Hyldmar, N.; He, Y.; Prorok, A. A Fleet of Miniature Cars for Experiments in Cooperative Driving. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Kollock, P. Social Dilemmas: The Anatomy of Cooperation. Annu. Rev. Sociol. 1998, 24, 183–214. [Google Scholar] [CrossRef]
- Raimo, T. On the structural aspects of collective action and free-riding. Theory Descis. 1992, 32, 165–202. [Google Scholar]
- Zimmermann, M.; Schopf, D.; Lütteken, N.; Liu, Z.; Storost, K.; Baumann, M.; Happee, R.; Bengler, K.J. Carrot and stick: A game-theoretic approach to motivate cooperative driving through social interaction. Transp. Res. Part C Emerg. Technol. 2018, 88, 159–175. [Google Scholar] [CrossRef]
- Ploeg, J.; Englund, C.; Nijmeijer, H.; Semsar-Kazerooni, E.; Shladover, S.E.; Voronov, A.; van de Wouw, N. Guest Editorial Introduction to the Special Issue on the 2016 Grand Cooperative Driving Challenge. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1208–1212. [Google Scholar] [CrossRef]
- Stoll, T.; Müller, F.; Baumann, M. When cooperation is needed: The effect of spatial and time distance and criticality on willingness to cooperate. Cogn. Tech. Work 2018, 54, 163193. [Google Scholar] [CrossRef]
- Andrea, B.; Gregor, J.; Alexander, P. EDDI Elektronische Deichsel—Digitale Innovation. 2018. Available online: https://www.deutschebahn.com/resource/blob/4136370/3227eac8b688106dc68e9292f4a173e9/Platooning_EDDI_Projektbericht_10052019_DE-data.pdf (accessed on 14 April 2020).
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel Economy in Truck Platooning: A Literature Overview and Directions for Future Research. J. Adv. Transp. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Stehbeck, F. Designing and Scheduling Cost-Efficient Tours by Using the Concept of Truck Platooning. Manag. Sci. 2019, 4, 566–634. [Google Scholar] [CrossRef]
- Mohamed, A.B.; Popieul, J.-C.; Chouki, S. Multi-level Cooperation between the Driver and an Automated Driving System during Lane Change Maneuver. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar]
- OLG Hamm. Beschluss 4 Ss OWi 629/08. Available online: https://openjur.de/u/31853.html (accessed on 14 April 2020).
- Knies, C.; Leonhard, H.; Frank, D. Cooperative Maneuver Planning for Highway Traffic Scenarios based on Monte-Carlo Tree Search. In Proceedings of the AAET 2019—Automatisiertes und vernetztes Fahren, Montreal, QC, Canada, 13–17 May 2019. [Google Scholar]
- Standards Committee of the IEEE Computer Society. IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2010; ISBN 9780738163246. [Google Scholar]
- Bjerke, B. LTE-advanced and the evolution of LTE deployments. Bjerke-LTEevolution-11. IEEE Wirel. Commun. 2011, 18, 4–5. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, Herds, and Schools: A Distributed Behavioral Model. Comput. Graph. 1987, 21, 25–34. [Google Scholar]
- Kurzer, K.; Engelhorn, F.; Zöllner, J.M. Accelerating Cooperative Planning for Automated Vehicles with Learned Heuristics and Monte Carlo Tree Search. Available online: https://arxiv.org/pdf/2002.00497.pdf (accessed on 7 February 2020).
- Volkswagen AG. Strategy TOGETHER 2025+: Shaping Mobility—for Generations to Come. Available online: https://www.volkswagenag.com/en/group/strategy.html (accessed on 7 January 2020).
- PWC. Five Trends Transforming the Automotive Industry. Available online: https://www.pwc.at/de/publikationen/branchen-und-wirtschaftsstudien/eascy-five-trends-transforming-the-automotive-industry_2018.pdf (accessed on 7 January 2020).
- Daimler AG. CASE—Intuitive Mobility. Available online: https://www.daimler.com/innovation/case-2.html (accessed on 7 January 2020).
- BMW AG. The BMW Vision iNEXT. Available online: https://www.bmwgroup.com/BMW-Vision-iNEXT (accessed on 7 January 2020).
- Bill, K. 4G Wireless Technology: When will it happen? What does it offer? In Proceedings of the 2008 IEEE Asian Solid-State Circuits Conference, Fukuoka, Japan, 3–5 November 2008. [Google Scholar]
- Mohamed, G.; Georg, J.-M. A Reconfigurable 5G Testbed for V2X and Industry 4.0 Applications. Elektrotech. Inftech. 2015, 132, 409–416. [Google Scholar] [CrossRef]
- ETSI—ITS. Communications Architecture. ETSI-CommunicationArchitecture-10. EN 302 665—V1.1.1—Intelligent Transport Systems (ITS); Vehicular Communications. 2010. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/302665/01.01.01_60/en_302665v010101p.pdf (accessed on 7 January 2020).
- Almeida, T.T.C.; de Gomes, L.; Ortiz, F.M.; Junior, J.G.R.; Costa, L.H.M.K. IEEE 802.11p Performance Evaluation: Simulations vs. Real Experiments. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3840–3845. [Google Scholar]
- Arena, F.; Pau, G. An Overview of Vehicular Communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Abdeldime, M.S.; Wu, L. The Physical Layer of the IEEE 802.11p WAVE Communication Standard: The Specifications and Challenges. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 22–24 October 2014. [Google Scholar]
- Gao, S.; Lim, A.; Bevly, D. An empirical study of DSRC V2V performance in truck platooning scenarios. Digit. Commun. Netw. 2016, 2, 233–244. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yazdani, K.; Abbaspour, A.; Crane III, C.D.; Dixon, W.E. Detection and Mitigation of False Data Injection Attacks in Networked Control Systems. IEEE Trans. Ind. Inf. 2020, 16, 4281–4292. [Google Scholar] [CrossRef]
- Mehdi, H.; Bruno, S.; Emanuele, G. Feasibility and Detection of Replay Attack in Networked Constrained Cyber-Physical Systems. In Proceedings of the 57th Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, USA, 24–27 September 2019. [Google Scholar]
- Biron, Z.A.; Dey, S.; Pisu, P. Resilient control strategy under Denial of Service in connected vehicles. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4971–4978, ISBN 978-1-5090-5992-8. [Google Scholar]
- Watzlawick, P.; Bavelas, J.B.; Jackson, D.D.; O’Hanlon, B. Pragmatics of Human Communication. A Study of Interactional Patterns, Pathologies, and Paradoxes; Pbk. ed.; W.W. Norton, & Co: New York, NY, USA, 2011; ISBN 0393707229. [Google Scholar]
- ETSI—ITS. Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service. ETSI-CAM-14. EN 302 637-2—V1.3.1—Intelligent Transport Systems (ITS); Vehicular Communications. 2014. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.03.01_30/en_30263702v010301v.pdf (accessed on 14 April 2020).
- ETSI-ITS. Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service. ETSI-DENM-14. EN 302 637-3—V1.2.—Intelligent Transport Systems (ITS); Vehicular Communications. 2014. Available online: https://www.cisco.com/c/dam/en_us/solutions/industries/docs/trans/its-standards-part-2.pdf (accessed on 14 April 2020).
- ETSI. Intelligent Transport Systems (ITS). Cooperative Perception Services. Available online: https://portal.etsi.org/webapp/WorkProgram/Report_WorkItem.asp?wki_id=46541 (accessed on 14 April 2020).
- Gunther, H.-J.; Mennenga, B.; Trauer, O.; Riebl, R.; Wolf, L. Realizing collective perception in a vehicle. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–7, ISBN 978-1-5090-5197-7. [Google Scholar]
- Sawade, O.; Schulze, M.; Radusch, I. Robust Communication for Cooperative Driving Maneuvers. IEEE Intell. Transp. Syst. Mag. 2018, 10, 159–169. [Google Scholar] [CrossRef]
- Bernd, L.; Hendrik-Jörn, G.; Lars, W. A Generic Approach towards Maneuver Coordination for Automated Vehicles. In Proceedings of the 2018 IEEE Intelligent Transportation Systems Conference, Maui, HI, USA, 4–7 November 2018; IEEE: Piscataway, NJ, USA, 2018. ISBN 9781728103242. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); Vehicular Communications; Informative report for the Maneuver Coordination Service. Available online: https://portal.etsi.org/webapp/WorkProgram/Report_WorkItem.asp?wki_id=53991 (accessed on 14 April 2020).
- Bojarski, M.; Testa, D.D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J.; et al. End to End Learning for Self-Driving Cars. 2016. Available online: http://arxiv.org/pdf/1604.07316v1 (accessed on 14 April 2020).
- Wei, J.; Dolan, J.M. A robust autonomous freeway driving algorithm. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium (IV), Xi’an, China, 3–5 June 2009; pp. 1015–1020, ISBN 978-1-4244-3503-6. [Google Scholar]
- Wei, J.; Dolan, J.M.; Litkouhi, B. A prediction- and cost function-based algorithm for robust autonomous freeway driving. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium (IV), La Jolla, CA, USA, 21–24 January 2010; pp. 512–517, ISBN 978-1-4244-7866-8. [Google Scholar]
- Junqing, W.; John, D.; Bakhtiar, L. Autonomous vehicle social behavior for highway entrance ramp management. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, Australia, 23–26 June 2013. [Google Scholar]
- Lenz, D.; Kessler, T.; Knoll, A. Tactical cooperative planning for autonomous highway driving using Monte-Carlo Tree Search. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 Junuary 2016; pp. 447–455, ISBN 978-1-5090-1821-5. [Google Scholar]
- Kurzer, K.; Zhou, C.; Zöllner, J.M. Decentralized Cooperative Planning for Automated Vehicles with Hierarchical Monte Carlo Tree Search. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 529–536. [Google Scholar] [CrossRef]
- Kurzer, K.; Engelhorn, F.; Zöllner, J.M. Decentralized Cooperative Planning for Automated Vehicles with Continuous Monte Carlo Tree Search. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 452–459. [Google Scholar] [CrossRef]
- Zhihai, Y.; Jun, W.; Yihuan, Z. A Game-Theoretical Approach to Driving Decision Making in Highway Scenarios. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; ISBN 9781538644539. [Google Scholar]
- Fisac, J.F.; Bronstein, E.; Stefansson, E.; Sadigh, D.; Sastry, S.S.; Dragan, A.D. Hierarchical Game-Theoretic Planning for Autonomous Vehicles. In Proceedings of the International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2018. [Google Scholar]
- Kyushik, M.; Hayoung, K. Deep Q Learning Based High Level Driving Policy Determination. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; ISBN 9781538644539. [Google Scholar]
- Mirchevska, B.; Blum, M.; Louis, L.; Boedecker, J.; Werling, M. Reinforcement Learning for Autonomous Maneuvering in Highway Scenarios. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Naik, G.; Choudhury, B.; Park, J.-M. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Giammarco, C.; Alessandro, B.; Barbara, M.; Masini, A.Z. Performance Comparison between IEEE 802.11p and LTE-V2V In-coverage and Out-of-coverage for Cooperative Awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC) 2017, Torino, Italy, 27–29 November 2017. [Google Scholar]
- Andrew, T.; Kees, M.; Alessio, F.; Vincent, M. C-ITS: Three observations on LTE-V2X and ETSI-ITS G5. Available online: https://www.nxp.com/docs/en/white-paper/CITSCOMPWP.pdf (accessed on 16 January 2020).
- IMAGinE—Solutions for Cooperative Driving. Available online: https://imagine-online.de (accessed on 7 January 2020).
- 5G-MOBIX. Available online: https://www.5g-mobix.com/ (accessed on 16 January 2020).
- ICT4CART. Available online: https://www.ict4cart.eu/ (accessed on 16 January 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B | Cooperate | Betray | |||
|---|---|---|---|---|---|
| A | |||||
| Cooperate | 1 | 0 | |||
| 1 | 3 | ||||
| Betray | 3 | 2 | |||
| 0 | 2 | ||||
| Quality | Communication Needs | Mixed Traffic | Robustness | Computation | Infrastructure | Delay | |
|---|---|---|---|---|---|---|---|
| CP |  |  | | | | | |
| DP |  | | | | | | |
| DPWC | | | | | | | |
| Availability | Reliability | Latency | Bandwidth | Range | Local Independence | Costs | Security | |
|---|---|---|---|---|---|---|---|---|
| ITS-G5 | | | | | | | | |
| LTE 4G | | | | | | | | |
| LTE 5G | | | | | | | | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mertens, J.C.; Knies, C.; Diermeyer, F.; Escherle, S.; Kraus, S. The Need for Cooperative Automated Driving. Electronics 2020, 9, 754. https://doi.org/10.3390/electronics9050754
Mertens JC, Knies C, Diermeyer F, Escherle S, Kraus S. The Need for Cooperative Automated Driving. Electronics. 2020; 9(5):754. https://doi.org/10.3390/electronics9050754
Chicago/Turabian StyleMertens, Jan Cedric, Christian Knies, Frank Diermeyer, Svenja Escherle, and Sven Kraus. 2020. "The Need for Cooperative Automated Driving" Electronics 9, no. 5: 754. https://doi.org/10.3390/electronics9050754
APA StyleMertens, J. C., Knies, C., Diermeyer, F., Escherle, S., & Kraus, S. (2020). The Need for Cooperative Automated Driving. Electronics, 9(5), 754. https://doi.org/10.3390/electronics9050754