Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles

 ,
,  ,
, 
 and
and 
Abstract
1. Introduction
- Development of a simulation platform for the evaluation and development of control algorithms.
- Development of a connected traffic signal.
- Development of a specific smart- phone application.
- Development of a specific traffic signal control server.
- Planning and mapping of the experimental site.
- Conclusive implementation of all the different parts of the system in the final experiment.
2. Materials and Methods
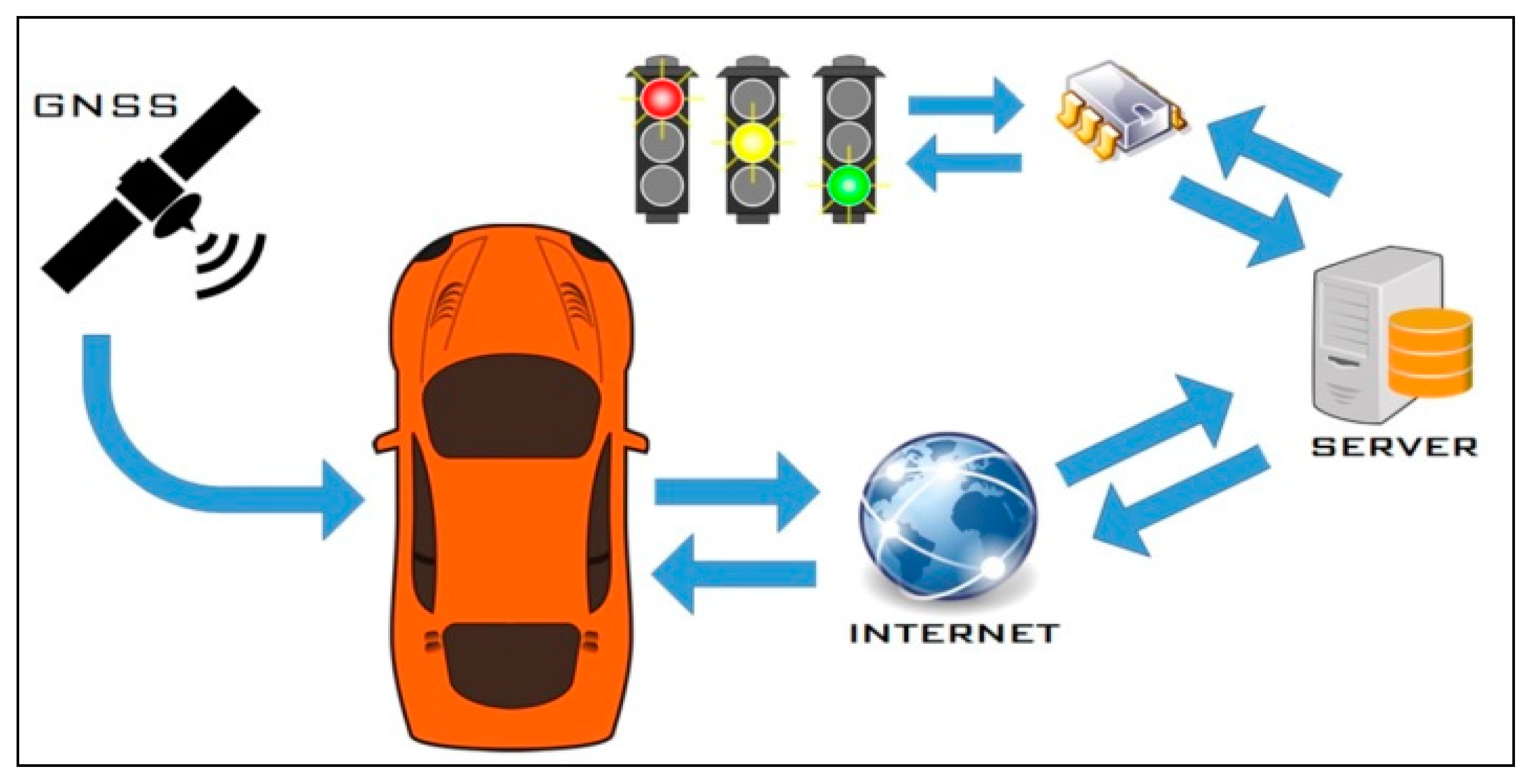
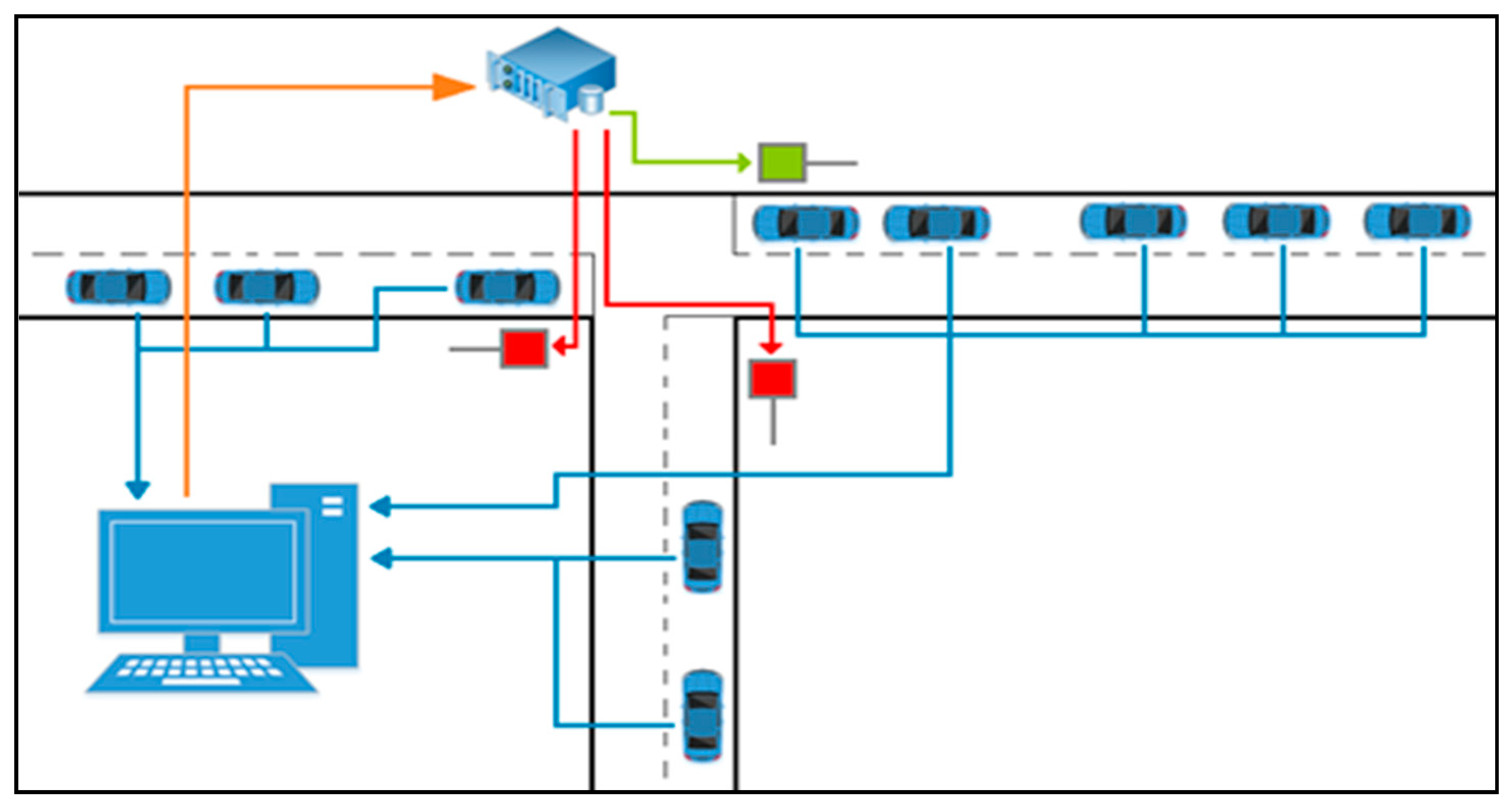
2.1. The Proposed Cooperative FCD-Based Adaptive Traffic Signal System
- In traffic signal regulation there is competition between drivers coming from different approaches of the same intersection, they compete for the available green time. In FCDATS there is also competition between “connected” vehicles and traditional vehicles, “connected” vehicles in fact could receive more green time at the expense of not “connected” vehicles that cannot be considered by FCDATS systems.
- Cooperation is naturally present in FCDATS since a “connected” vehicle sends useful information on the current state of the traffic network. This information could advantage also other vehicles which are not connected. The findings of previous works [63,64,66] based on simulation showed that when a percentage of 30% is reached all vehicles take advantage from the shared information coming from “connected” vehicles.
- the traffic lights of the intersection that are actuated by a local controller;
- the local electronic controller (Raspberry microcomputer) that is connected on the internet and that acts as a web server regulating the traffic signals at request;
- a central server that collects data from “connected” vehicles” and establishes the best traffic signal cycle according to data processing and the algorithm that are described in the following;
- the “connected” vehicles with a smartphone application that receive data relative to positions and speeds from the GNSS system and transmit them to the central server (on the common local wireless phone data network).
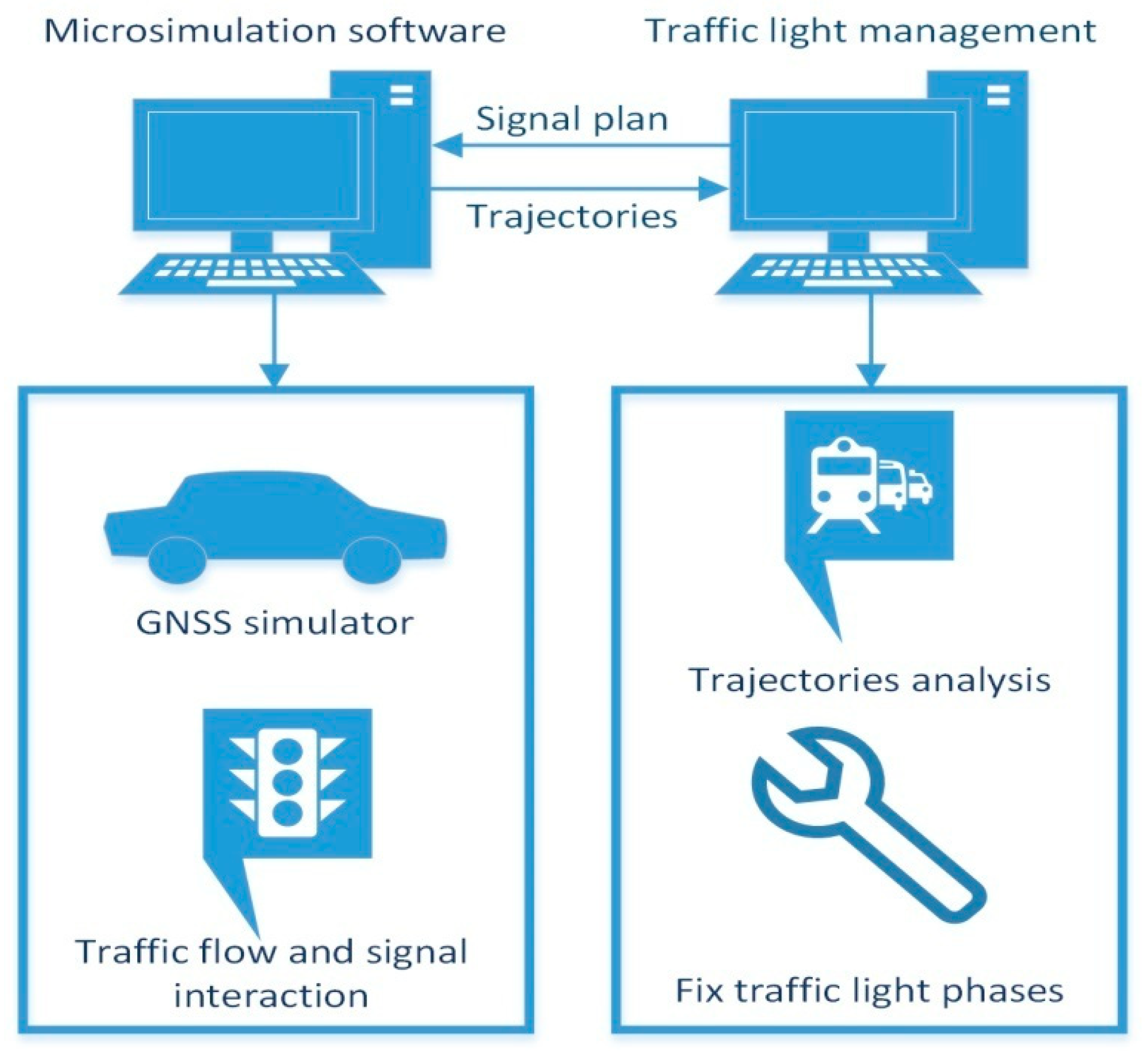
2.2. Development of a Simulation Platform and a Dedicated ITS Laboratory
- a first computer that was host for the TRITONE package combined with the GNSS error simulator. These two softwares together created a virtual reality environment based on microsimulation;
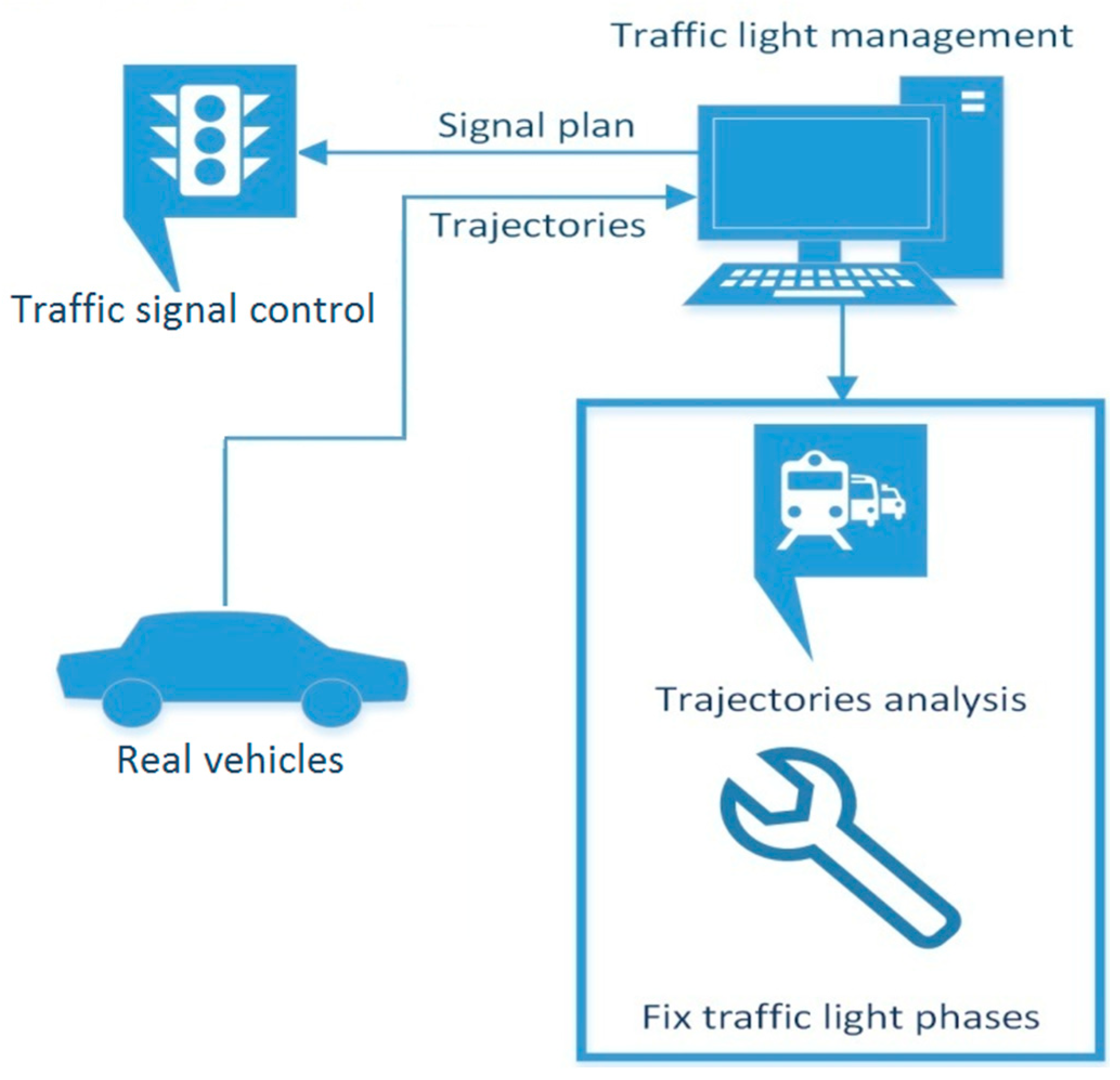
- a second computer that was designed to be the central signal control server which was designed to regulate traffic signals from vehicles trajectories. The central server was structured so that it would work, in real time, both in simulation and connected with real traffic signals.
- Scenario type A, where the satellite localization is almost perfect as the sky is almost completely clear.
- Scenario type B, where moderate urbanization can create sight disturbances that can partially reduce satellite signals (buildings on only one side of the street).
- Scenario type C, where urbanization creates disturbances with tall buildings at least 18 m on both sides of the street (urban canyon).
2.3. Evaluation and Development of Control Algorithms
2.3.1. Greedy Algorithm
2.3.2. An Algorithm Based on Nash Bargaining Equilibrium
2.3.3. Fallback on Fixed Cycle, Green Requirements
2.3.4. Obtained Results
- The overall performance in terms of total average travel time is good since average travel time is always decreasing with the increase in the percentage of “connected” vehicles.
- The overall performance in terms of total average travel time can go from a mere 5% reduction (when few vehicles are connected) to over 70% reduction (with 100% of connected vehicles and with a badly regulated intersection). This depends on different conditions of the intersection considered, it must be noted that the reduction in travel times was calculated in our simulations on real urban intersections with real measured flows and signal cycles. Moreover, we did not confront our system with a traditional real time adaptive traffic signal system.
- With a low percentage of “connected” vehicles (under 30%) these “connected” vehicles would take advantage of the system and would obtain priority over other drivers who would be slightly delayed at the traffic signals. It is important to note that in all our simulations the total travel time reduction for “connected” vehicles was always greater than the small delay that traditional vehicles have to suffer;
- With a percentage of over 30% of “connected” vehicles the system works very efficiently and offers convenient cycle lengths and phase times for all users;
- The system can potentially reduce overall traffic congestion and pollution emissions;
- The system works also for multiple intersections and can automatically coordinate green times at different intersections [64].
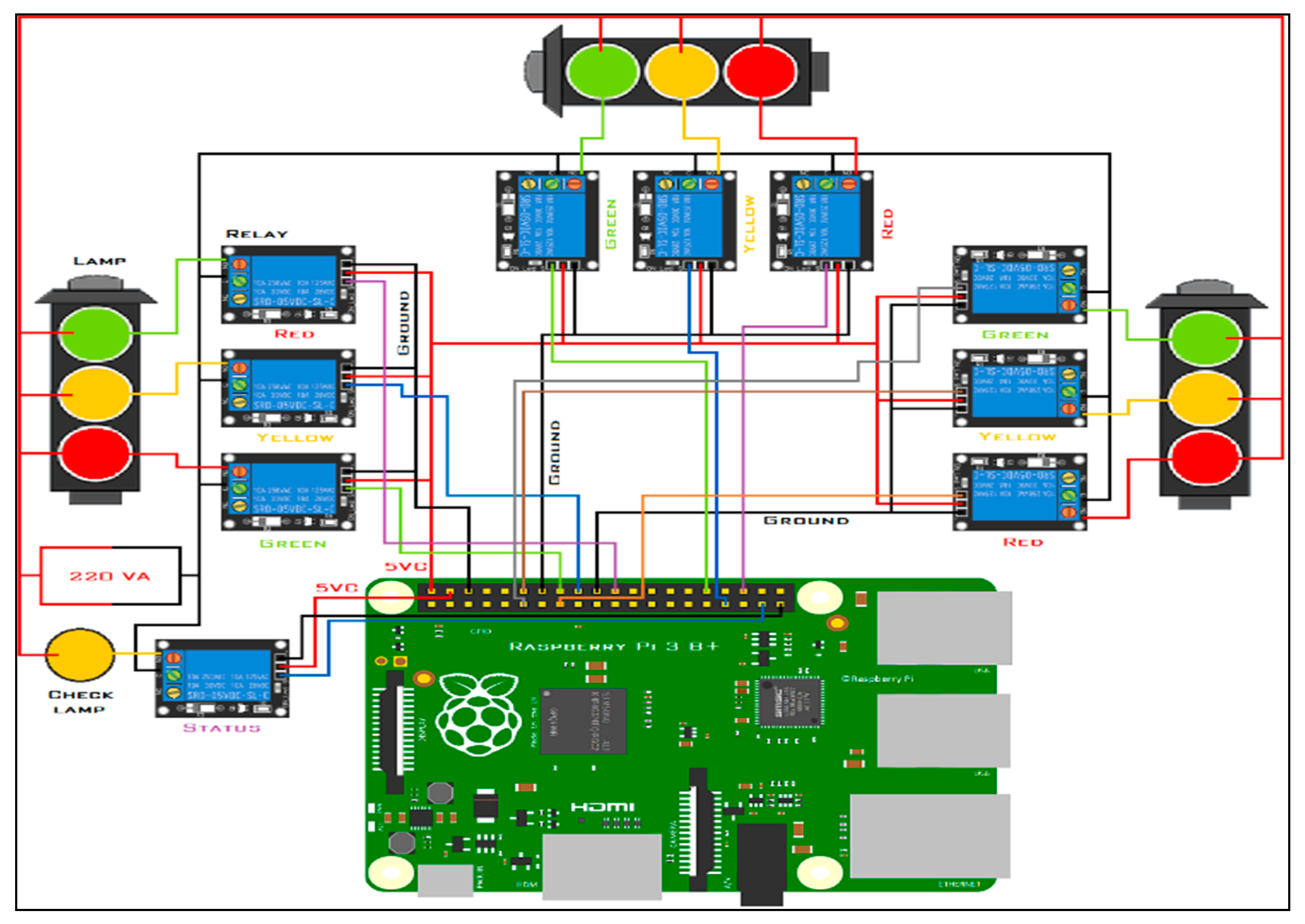
2.4. Development of a Connected Traffic Signal
2.5. Development of a Specific Smartphone Application
2.6. Development of a Specific Traffic Signal Control Server
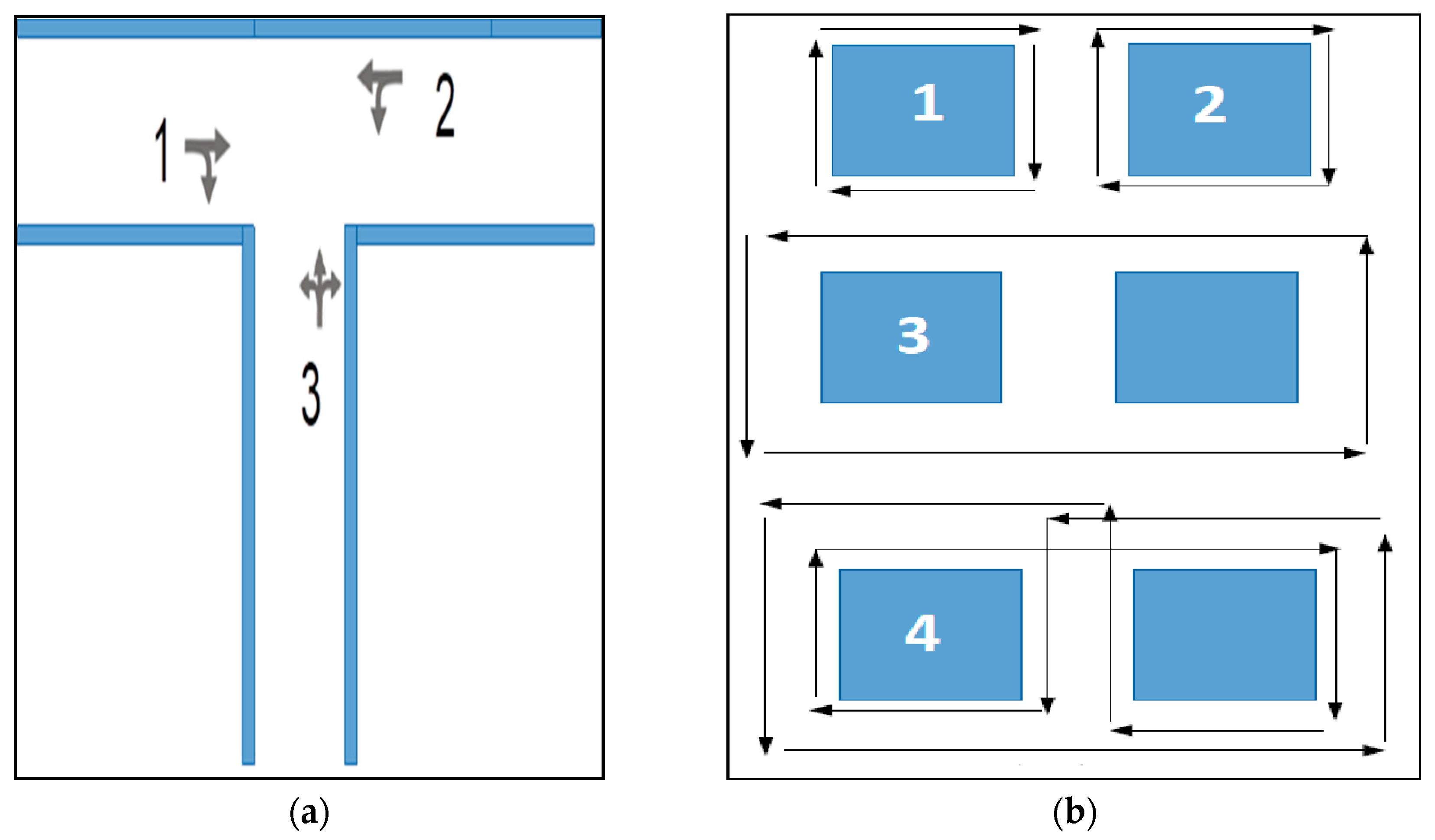
2.7. Planning and Mapping of the Experimental Site
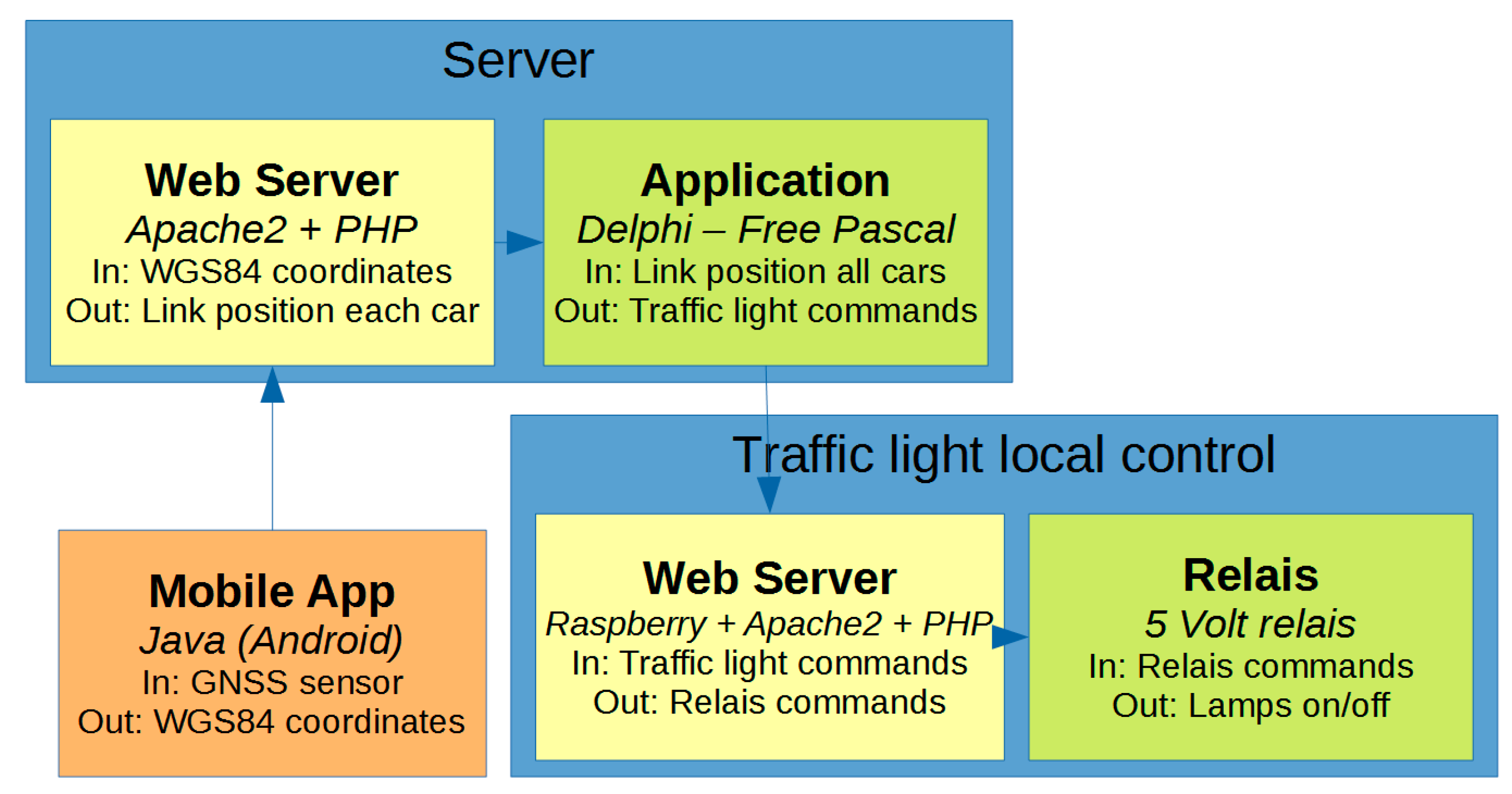
2.8. The Whole Assembled System
3. Results
- the algorithms would be unable to work with real trajectories since the localization errors could be different from the laboratory simulated errors;
- the server would fail to receive all the trajectories in real time;
- the traffic signal controller would fail to activate the phases according to the signal control server.
- the signal control server would fail.
- the mobile phone applications (which were uploaded on drivers’ smartphones just before the experiment) would suffer from compatibility issues or not work properly.
- the driver would not be able to follow the given paths.
4. Discussion
- Especially with low traffic volumes, drivers who are driving through intersections regulated by FCD data will practically always receive the green light.
- Combined results of previous works based on simulation and of the experiment of this work prove that FCD for adaptive traffic signal control not only can be very effective in reducing average travel time and pollution emissions but it is also absolutely feasible with current widespread technologies.
- Another result of this work is that simulation as a tool to evaluate FCDATS control algorithms brings results which are very similar to the results obtained in the real on-field experiment. The result is only partial since a definitive proof would need experimenting different conditions in terms of traffic flows, percentage of connected vehicles and different intersection layouts. Once this result is completely achieved it will be possible to test new algorithms and control logics just in simulation (the use of simulation is obviously less resource consuming). Once a good simulation test-bed is established a deployment of the proposed system in real city intersections can be easily performed with a good confidence that the FCDATS tested system can help to regulate traffic signals better.
- The experiment we performed involved the collaboration of more than 20 people at the experimental site involving: personnel occupied in the outline of the vehicle paths and intersection that was outlined in a big parking area, drivers, drone pilots and system operation management. This work was completed without specific funding and future development of this research is definitely possible in the direction of more experiments with different conditions.
- Adaptive real-time control of traffic signals is currently performed with data coming from induction loop detectors. The information that is elaborated is based on traffic flow counts at some given locations. The use of FCD data allows using trajectories of vehicles in adaptive traffic signal control. This information is much richer since detailed data of speeds and positions of single vehicles can be used. In other words, the proposed system is not only cheaper and simpler in the implementation it is also potentially more advanced since optimization of the traffic signal can be performed on a potentially more extended data set.
- In this work in a realistic setting with a real case study, the authors also investigated the “Deadlock” problem that is very frequent in simulation contests. Deadlock is a situation in which the informatics platform is busy because two or more competing actions are each waiting for the other to finish. In our experiment there was no case of deadlock and we met no difficulty managing the data coming from smartphones. This problem might still reveal itself with higher traffic flows and an interesting development of the research would be to exclude this possibility with other specific experiments.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mokaddem, Y.E.; Jawab, F. Researches and Applications of Intelligent Transportations Systems in Urban Area: Systematic Literature Review. ARPN J. Eng. Appl. Sci. 2019, 14, 639–652. [Google Scholar]
- Marzano, V.; Tocchi, D.; Papola, A.; Aponte, D.; Simonelli, F.; Cascetta, E. Incentives to freight railway undertakings compensating for infrastructural gaps: Methodology and practical application to Italy. Transp. Res. Part A Policy Pract. 2018, 110, 77–188. [Google Scholar] [CrossRef]
- Astarita, V.; Florian, M.; Musolino, G. A microscopic traffic simulation model for the evaluation of toll station systems. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001. [Google Scholar]
- Astarita, V.; Giofré, V.; Guido, G.; Vitale, A. Investigating road safety issues through a microsimulation model. Procedia Soc. Behav. Sci. 2011, 20, 226–235. [Google Scholar] [CrossRef]
- Young, W.; Sobhani, A.; Lenné, M.G.; Sarvi, M. Simulation of safety: A review of the state of the art in road safety simulation modelling. Accid. Anal. Prev. 2014, 66, 89–103. [Google Scholar] [CrossRef]
- Astarita, V.; Giofré, V.P. From traffic conflict simulation to traffic crash simulation: Introducing traffic safety indicators based on the explicit simulation of potential driver errors. Simul. Model. Pract. Theory 2019, 94, 215–236. [Google Scholar] [CrossRef]
- Osorio, C.; Punzo, V. Efficient calibration of microscopic car-following models for large-scale stochastic network simulators. Transp. Res. Part B Methodol. 2019, 119, 156–173. [Google Scholar] [CrossRef]
- Martinez, F.J.; Toh, C.K.; Cano, J.C.; Calafate, C.T.; Manzoni, P. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wirel. Commun. Mob. Comput. 2011, 11, 813–828. [Google Scholar] [CrossRef]
- Gentilea, G. New formulations of the stochastic user equilibrium with logit route choice as an extension of the deterministic model. Transp. Sci. 2018, 52, 1531–1547. [Google Scholar] [CrossRef]
- Gentile, G. Solving a Dynamic User Equilibrium model based on splitting rates with Gradient Projection algorithms. Transp. Res. Part B Methodol. 2016, 92, 120–147. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Di Febbraro, A.; Di Gangi, M.; Giannattasio, O. Stochastic Multi-Vehicle Assignment to Urban Transportation Networks. In Proceedings of the MT-ITS 2019—6th International Conference on Models and Technologies for Intelligent Transportation Systems, Cracow, Poland, 5–7 June 2019. [Google Scholar]
- Cantarella, G.E.; Watling, D.P. A general stochastic process for day-to-day dynamic traffic assignment: Formulation, asymptotic behaviour, and stability analysis. Transp. Res. Part B Methodol. 2016, 92, 3–21. [Google Scholar] [CrossRef]
- Trozzi, V.; Gentile, G.; Kaparias, I.; Bell, M.G.H. Effects of Countdown Displays in Public Transport Route Choice Under Severe Overcrowding. Netw. Spat. Econ. 2015, 15, 823–842. [Google Scholar] [CrossRef]
- Kucharski, R.; Gentile, G. Simulation of rerouting phenomena in Dynamic Traffic Assignment with the Information Comply Model. Transp. Res. Part B Methodol. 2018, 126, 414–441. [Google Scholar] [CrossRef]
- Marzano, V.; Papola, A.; Simonelli, F.; Papageorgiou, M. A Kalman Filter for Quasi-Dynamic o-d Flow Estimation/Updating. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3604–3612. [Google Scholar] [CrossRef]
- Papola, A.; Tinessa, F.; Marzano, V. Application of the Combination of Random Utility Models (CoRUM) to route choice. Transp. Res. Part B Methodol. 2018, 111, 304–326. [Google Scholar] [CrossRef]
- Papola, A. A new random utility model with flexible correlation pattern and closed-form covariance expression: The CoRUM. Transp. Res. Part B Methodol. 2016, 94, 80–96. [Google Scholar] [CrossRef]
- Martin, C. NO IDLE MATTER: Signal-Controlled or Signal-Free. TRAFFIC Technol. Int. 2007, 56–59. [Google Scholar]
- Steve Huntingford Traffic Lights Cause More Harm than Good. Available online: https://www.telegraph.co.uk/cars/comment/traffic-lights-cause-more-harm-than-good/ (accessed on 12 October 2018).
- Cassini, M. In your car no one can hear you scream! Are traffic controls in cities a necessary evil? Econ. Aff. 2006, 26, 75–78. [Google Scholar] [CrossRef]
- Cassini, M. Traffic lights: Weapons of mass distraction, danger and delay. Econ. Aff. 2010, 30, 79–80. [Google Scholar] [CrossRef]
- Ban, X.J.; Li, Y.; Skabardonis, A.; Margulici, J.D. Performance evaluation of travel-time estimation methods for real-time traffic applications. J. Intell. Transp. Syst. Technol. Plan. Oper. 2010, 14, 54–67. [Google Scholar] [CrossRef]
- Wright, J.; Dahlgren, J. Using Probe Vehicles Equipped with Toll Tag as Probes for Providing Travel Times; California PATH Program, Institute of Transportation Studies, University of California at Berkeley: Berkeley, CA, USA, 2001; ISSN 1055-1417. [Google Scholar]
- Priemer, C.; Friedrich, B. A decentralized adaptive traffic signal control using V2I communication data. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Astarita, V.; Festa, D.C.; Giofrè, V.P. Mobile Systems applied to Traffic Management and Safety: A state of the art. Procedia Comput. Sci. 2018, 134, 407–414. [Google Scholar] [CrossRef]
- Wahlstrom, J.; Skog, I.; Handel, P. Smartphone-Based Vehicle Telematics: A Ten-Year Anniversary. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2802–2825. [Google Scholar] [CrossRef]
- Astarita, V.; Danieli, G.; D’Elia, S. Sistema di Rilievo del Deflusso Veicolare per il Monitoraggio e Controllo del Traffico Basato Sulla Registrazione della Localizzazione dei Terminali di Telefonia Mobile. Patent 0001322707, 26 January 2000. [Google Scholar]
- Wasson, J.S.; Sturdevant, J.R.; Bullock, D.M. Real-time travel time estimates using media access control address matching. ITE J. (Institute Transp. Eng.) 2008, 78, 20–23. [Google Scholar]
- Young, S. Bluetooth Traffic Monitoring Technology: Concept of Operation & Deployment Guidelines; University of Maryland: College Park, MD, USA, 2008. [Google Scholar]
- Barceló, J.; Montero, L.; Marqués, L.; Carmona, C. Travel Time Forecasting and Dynamic Origin-Destination Estimation for Freeways Based on Bluetooth Traffic Monitoring. Transp. Res. Rec. J. Transp. Res. Board 2010, 2175, 19–27. [Google Scholar] [CrossRef]
- Barceló, J.; Montero, L.; Bullejos, M.; Serch, O.; Carmona, C. A kalman filter approach for exploiting bluetooth traffic data when estimating time-dependent od matrices. J. Intell. Transp. Syst. Technol. Plan. Oper. 2013, 17, 123–141. [Google Scholar] [CrossRef]
- Bachmann, C.; Roorda, M.J.; Abdulhai, B.; Moshiri, B. Fusing a bluetooth traffic monitoring system with loop detector data for improved freeway traffic speed estimation. J. Intell. Transp. Syst. Technol. Plan. Oper. 2013, 17, 152–164. [Google Scholar] [CrossRef]
- Ygnace, J.L.; Drane, C.; Yim, Y.B.; De Lacvivier, R. Travel Time Estimation on the San Francisco Bay Area Network Using Cellular Phones as Probes; California PATH Program, Institute of Transportation Studies, University of California at Berkeley: Berkeley, CA, USA, 2000; ISSN 1055-1417. [Google Scholar]
- Bolla, R.; Davoli, F.; Giordano, A. Estimating Road Traffic Parameters from Mobile Communications. In Proceedings of the 7th World Congress on Intelligent Systems, Turin, Italy, 6–9 November 2000; pp. 1107–1112. [Google Scholar]
- Rose, G. Mobile Phones as Traffic Probes: Practices, Prospects and Issues. Transp. Rev. 2006, 26, 275–291. [Google Scholar] [CrossRef]
- Astarita, V.; Bertini, R.L.; d’Elia, S.; Guido, G. Motorway traffic parameter estimation from mobile phone counts. Eur. J. Oper. Res. 2006, 175, 1435–1446. [Google Scholar] [CrossRef]
- Sohn, K.; Hwang, K. Space-based passing time estimation on a freeway using cell phones as traffic probes. IEEE Trans. Intell. Transp. Syst. 2008, 9, 559. [Google Scholar] [CrossRef]
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.; Jacobson, Q.; Bayen, A.M. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. Part C Emerg. Technol. 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Bar-Gera, H. Evaluation of a cellular phone-based system for measurements of traffic speeds and travel times: A case study from Israel. Transp. Res. Part C Emerg. Technol. 2007, 15, 380–391. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Saccomanno, F.F.; Carmine, F.D.; Astarita, V.; Rogano, D.; Gallelli, V. Using Smartphones As a Tool to Capture Road Traffic Attributes. Appl. Mech. Mater. 2013, 432, 513–519. [Google Scholar] [CrossRef]
- Guido, G.; Saccomanno, F.F.; Vitale, A.; Gallelli, V.; Festa, D.C.; Astarita, V.; Rogano, D.; Carvelli, D. Extracting vehicle tracking data from smartphone sensors. In Proceedings of the 92th Annual Meeting of Transportation Research Board, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Jiang, Y.; Zhang, J. Influence of Smartphone Apps with Driving Safety Related Diagnosis Functions on Expressway Driving Speed Changes. J. Transp. Eng. Part A Syst. 2017, 144, 04017069. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Astarita, V.; Saccomanno, F.; Giofré, V.P.; Gallelli, V. Estimation of Safety Performance Measures from Smartphone Sensors. Procedia Soc. Behav. Sci. 2012, 54, 1095–1103. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, J.; Wang, Y.; Wang, W. Drivers’ behavioral responses to driving risk diagnosis and real-time warning information provision on expressways: A smartphone app–based driving experiment. J. Transp. Saf. Secur. 2018, 1–29. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Giofrè, V.P. Co-operative ITS: Smartphone based measurement systems for road safety assessment. Procedia Comput. Sci. 2014, 37, 404–409. [Google Scholar] [CrossRef][Green Version]
- Astarita, V.; Guido, G.; Mongelli, D.; Giofrè, V.P. A co-operative methodology to estimate car fuel consumption by using smartphone sensors. Transport 2015, 30, 307–311. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Mongelli, D.W.E.; Giofrè, V.P. Ecosmart and TutorDrive: Tools for fuel consumption reduction. In Proceedings of the 2014 IEEE International Conference on Service Operations and Logistics, and Informatics, SOLI, Qingdao, China, 8–10 October 2014. [Google Scholar]
- Astarita, V.; Festa, D.C.; Mongelli, D.W.E. EcoSmart: An Application for Smartphones for Monitoring Driving Economy. Adv. Mat. Res. 2014, 827, 360–367. [Google Scholar] [CrossRef]
- Astarita, V.; Festa, D.C.; Mongelli, D.W.E.; Mongelli, N.; Ruffolo, O.; Servino, A. EcoSmart: A Survey and Sector Analysis of Mobile Phone Application Market for Fuel Consumption Reduction; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 519–520, ISBN 9783038350194. [Google Scholar]
- Astarita, V.; Caruso, M.V.; Danieli, G.; Festa, D.C.; Giofrè, V.P.; Iuele, T.; Vaiana, R. A Mobile Application for Road Surface Quality Control: UNIquALroad. Procedia Soc. Behav. Sci. 2012, 54, 1135–1144. [Google Scholar] [CrossRef]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008. [Google Scholar]
- Festa, D.C.; Mongelli, D.W.E.; Astarita, V.; Giorgi, P. First results of a new methodology for the identification of road surface anomalies. In Proceedings of the 2013 IEEE International Conference on Service Operations and Logistics, and Informatics, SOLI, Dongguan, China, 28–30 July 2013. [Google Scholar]
- Bierlaire, M.; Chen, J.; Newman, J.P. Modeling Route Choice Behavior From Smartphone GPS Data; Report TRANSP-OR 101016; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2010. [Google Scholar]
- Dailey, D.J.; Cathey, F.W. Virtual speed sensors using transit vehicles as traffic probes. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Singapore, 6 September 2002. [Google Scholar]
- Axer, S.; Friedrich, B. Level of service estimation based on low-frequency floating car data. Transp. Res. Procedia 2014, 3, 1051–1058. [Google Scholar] [CrossRef]
- Biral, F.; Da Lio, M.; Bertolazzi, E. Combining safety margins and user preferences into a driving criterion for optimal control-based computation of reference maneuvers for an ADAS of the next generation. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005. [Google Scholar]
- Vaiana, R.; Iuele, T.; Astarita, V.; Caruso, M.V.; Tassitani, A.; Zaffino, C.; Giofrè, V.P. Driving behavior and traffic safety: An acceleration-based safety evaluation procedure for smartphones. Mod. Appl. Sci. 2014, 8, 88. [Google Scholar] [CrossRef]
- Barthauer, M.; Friedrich, B. Evaluation of a signal state prediction algorithm for car to infrastructure applications. Transp. Res. Procedia 2014, 3, 982–991. [Google Scholar] [CrossRef][Green Version]
- Olaverri-Monreal, C.; Errea-Moreno, J.; Díaz-Álvarez, A. Implementation and Evaluation of a Traffic Light Assistance System Based on V2I Communication in a Simulation Framework. J. Adv. Transp. 2018. [Google Scholar] [CrossRef]
- Hu, J.; Fontaine, M.D.; Park, B.B.; Ma, J. Field evaluations of an adaptive traffic signal—Using private-sector probe data. J. Transp. Eng. 2015, 142, 04015033. [Google Scholar] [CrossRef]
- Saust, F.; Bley, O.; Kutzner, R.; Wille, J.M.; Friedrich, B.; Maurer, M. Exploitability of vehicle related sensor data in cooperative systems. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010. [Google Scholar]
- Krajzewicz, D.; Heinrich, M.; Milano, M. COLOMBO: Investigating the Potential of V2X for Traffic Management Purposes assuming low penetration Rates. In Proceedings of the 9th ITS European Congress, Dublin, Ireland, 4–7 June 2013. [Google Scholar]
- Astarita, V.; Vincenzo Pasquale, G.; GUIDO, G.; Vitale, A. A Single Intersection Cooperative-Competitive Paradigm in Real Time Traffic Signal Settings Based on Floating Car Data. Energies 2019, 12, 409. [Google Scholar] [CrossRef]
- Astarita, V.; Festa, D.C.; Vincenzo, G. Cooperative-competitive paradigm in traffic signal synchronization based on floating car data. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018. [Google Scholar]
- Gradinescu, V.; Gorgorin, C.; Diaconescu, R.; Cristea, V.; Iftode, L. Adaptive traffic lights using car-to-car communication. In Proceedings of the IEEE Vehicular Technology Conference, Dublin, Ireland, 22–25 April 2007. [Google Scholar]
- Astarita, V.; Giofrè, V.P.; Guido, G.; Vitale, A. The Use of Adaptive Traffic Signal Systems Based on Floating Car Data. Wirel. Commun. Mob. Comput. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Chandan, K.; Seco, A.M.; Silva, A.B. Real-time Traffic Signal Control for Isolated Intersection, using Car-following Logic under Connected Vehicle Environment. Transp. Res. Procedia 2017, 25, 1610–1625. [Google Scholar] [CrossRef]
- Zhang, R.; Ishikawa, A.; Wang, W.; Striner, B.; Tonguz, O. Intelligent Traffic Signal Control: Using Reinforcement Learning with Partial Detection. arXiv 2018, arXiv:1807.01628. [Google Scholar]
- Sharma, S.; Lubmann, J.; So, J. Controller Independent Software-in-the-Loop Approach to Evaluate Rule-Based Traffic Signal Retiming Strategy by Utilizing Floating Car Data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3585–3594. [Google Scholar] [CrossRef]
- Marinelli, M.; Palmisano, G.; Astarita, V.; Ottomanelli, M.; Dell’Orco, M. A Fuzzy set-based method to identify the car position in a road lane at intersections by smartphone GPS data. Transp. Res. Procedia 2017, 27, 444–451. [Google Scholar] [CrossRef]
- Giofre, V.P.; Astarita, V.; Guido, G.; Vitale, A. Localization issues in the use of ITS. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, Naples, Italy, 26–28 June 2017. [Google Scholar]
- Giofrè, V.P.; Maciejewski, M.; Merkisz Guranowska, A.; Piątkowski, B.; Astarita, V. Real road network application of a new microsimulation tool TRITONE. Arch. Transp. 2013, 27, 111–121. [Google Scholar] [CrossRef]
- Astarita, V.; Giofrè, V.; Guido, G.; Vitale, A.; Festa, D.; Vaiana, R.; Iuele, T.; Mongelli, D.; Rogano, D.; Gallelli, V. New features of Tritone for the evaluation of traffic safety performances. In Transport Infrastructure and Systems; Taylor & Francis Group: London, UK, 2017; pp. 625–632. [Google Scholar]
- Astarita, V.; Giofré, V.; Guido, G.; Vitale, A. Calibration of a new microsimulation package for the evaluation of traffic safety performances. PROCEDIA Soc. Behav. Sci. 2012, 54, 1019–1026. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Vitale, A.; Giofré, V. A new microsimulation model for the evaluation of traffic safety performances. Eur. Transp. Trasp. Eur. 2012, 51, 1–16. [Google Scholar]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of {SUMO—Simulation of Urban MObility}. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Ekeila, W.; Sayed, T.; El Esawey, M. Development of Dynamic Transit Signal Priority Strategy. Transp. Res. Rec. J. Transp. Res. Board 2009. [Google Scholar] [CrossRef]
- Tan, L.; Zhao, X.; Hu, D.; Shang, Y.; Wang, R. A study of single intersection traffic signal control based on two-player cooperation game model. In Proceedings of the 2010 WASE International Conference on Information Engineering, ICIE, Beidaihe, China, 14–15 August 2010. [Google Scholar]
- Abdelghaffar, H.M.; Yang, H.; Rakha, H.A. Isolated traffic signal control using a game theoretic framework. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | |
|---|---|---|---|
| Static cycle | 381 | 97 | 2.26 |
| FCDATL | 549 | 44 | 4.97 |
| Percentage gain | 44.09% | 54.60% | 120.28% |
| Total Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | |
|---|---|---|---|
| Static cycle | 209 | 156 | 1.43 |
| FCDATL | 450 | 42 | 5.33 |
| Percentage gain | 115.97% | 73.11% | 271.83% |
| Approach n° | Static Cycle | FCDATL | ||||
|---|---|---|---|---|---|---|
| Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | Total Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | |
| 1 | 102.0 | 34.24 | 2.44 | 148.0 | 15.96 | 5.24 |
| 2 | 91.0 | 39.91 | 1.94 | 149.0 | 15.23 | 5.08 |
| 3 | 188.0 | 22.90 | 2.53 | 252.0 | 12.88 | 4.50 |
| Approach n° | Static Cycle | FCDATL | ||||
|---|---|---|---|---|---|---|
| Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | Total Outflow [veh/h] | Average Travel Time [s] | Average Speed [km/h] | |
| 1 | 41.7 | 68.20 | 1.32 | 119.9 | 14.73 | 6.11 |
| 2 | 75.1 | 40.94 | 2.02 | 138.0 | 13.97 | 5.93 |
| 3 | 91.8 | 46.55 | 1.08 | 192.5 | 13.17 | 3.83 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Astarita, V.; Giofré, V.P.; Festa, D.C.; Guido, G.; Vitale, A. Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles. Electronics 2020, 9, 114. https://doi.org/10.3390/electronics9010114
Astarita V, Giofré VP, Festa DC, Guido G, Vitale A. Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles. Electronics. 2020; 9(1):114. https://doi.org/10.3390/electronics9010114
Chicago/Turabian StyleAstarita, Vittorio, Vincenzo Pasquale Giofré, Demetrio Carmine Festa, Giuseppe Guido, and Alessandro Vitale. 2020. "Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles" Electronics 9, no. 1: 114. https://doi.org/10.3390/electronics9010114
APA StyleAstarita, V., Giofré, V. P., Festa, D. C., Guido, G., & Vitale, A. (2020). Floating Car Data Adaptive Traffic Signals: A Description of the First Real-Time Experiment with “Connected” Vehicles. Electronics, 9(1), 114. https://doi.org/10.3390/electronics9010114