Multiterminal Medium Voltage DC Distribution Network Hierarchical Control


Abstract
1. Introduction
2. DC OPF-Based Secondary Control
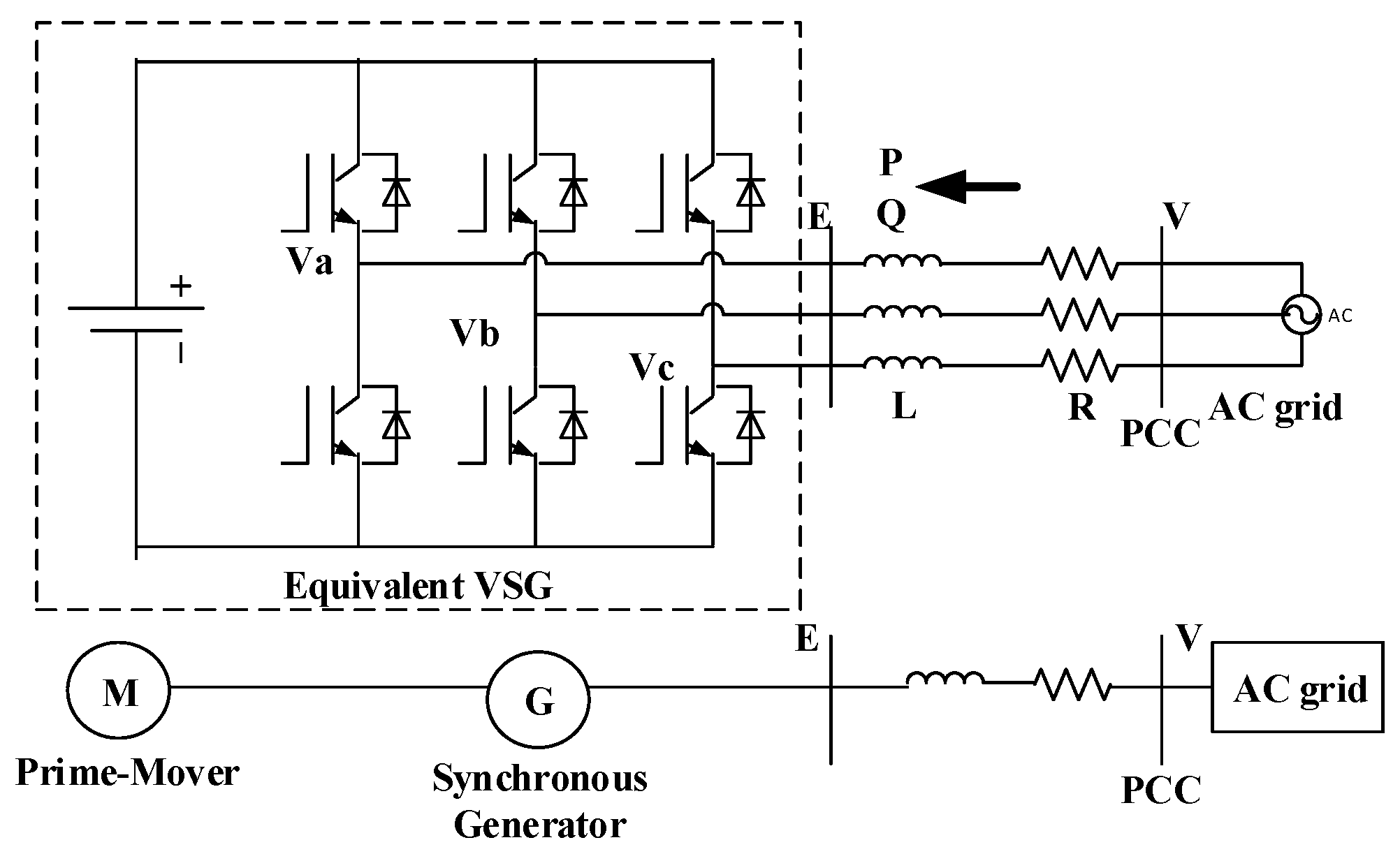
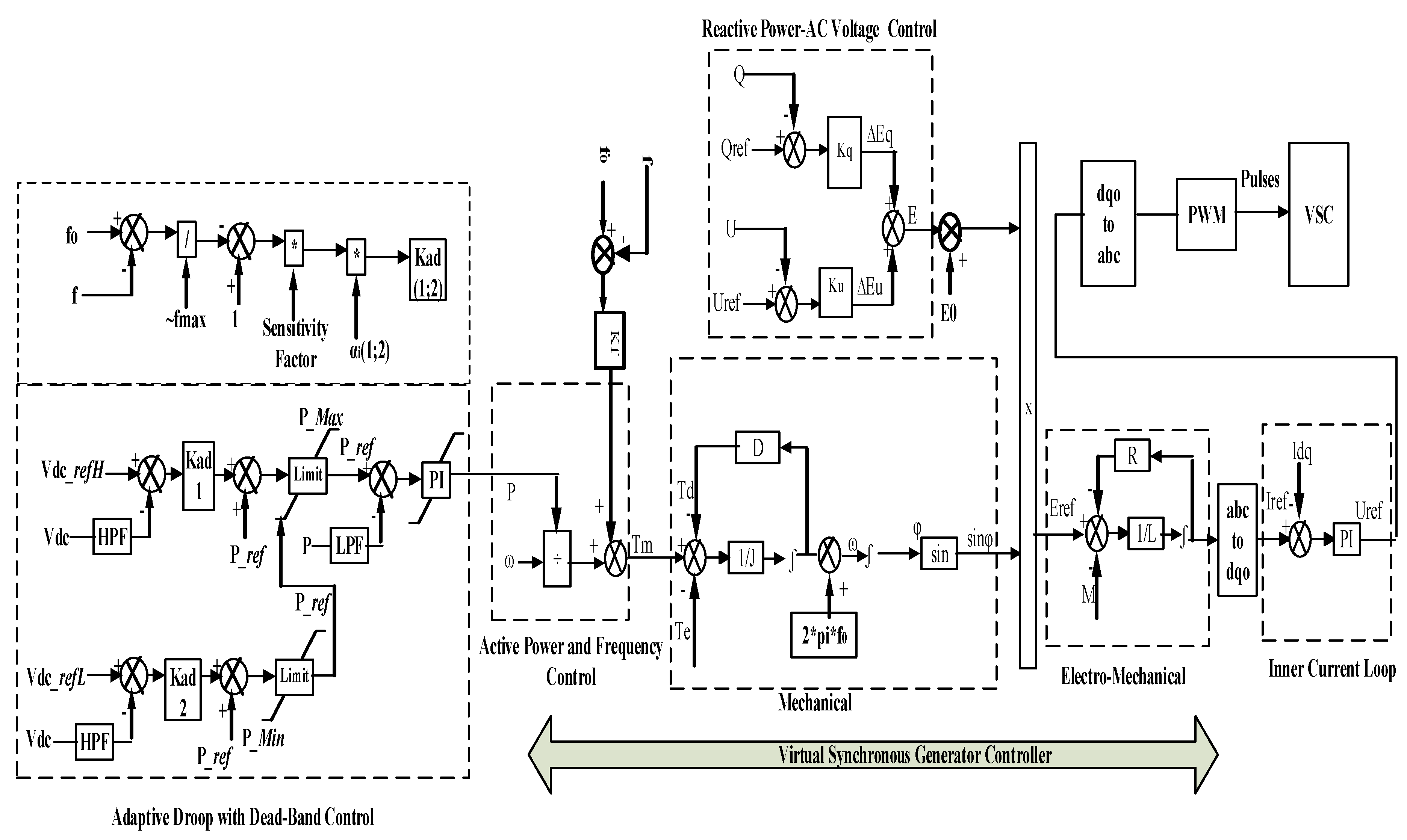
3. Adaptive Droop with a Dead-band and VSG
4. Hierarchical Control System
5. Simulation Test System, Results and Discussion
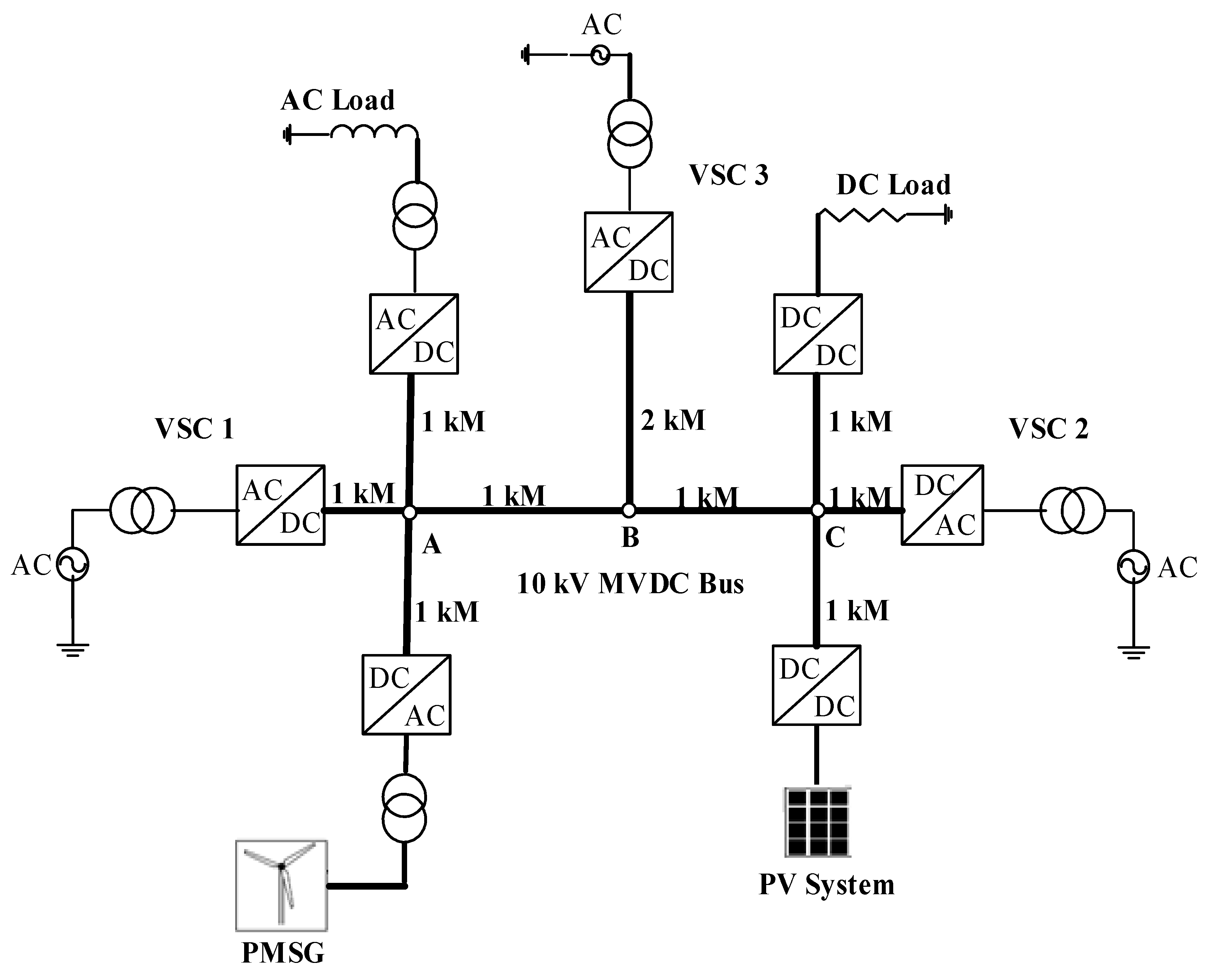
5.1. Test System
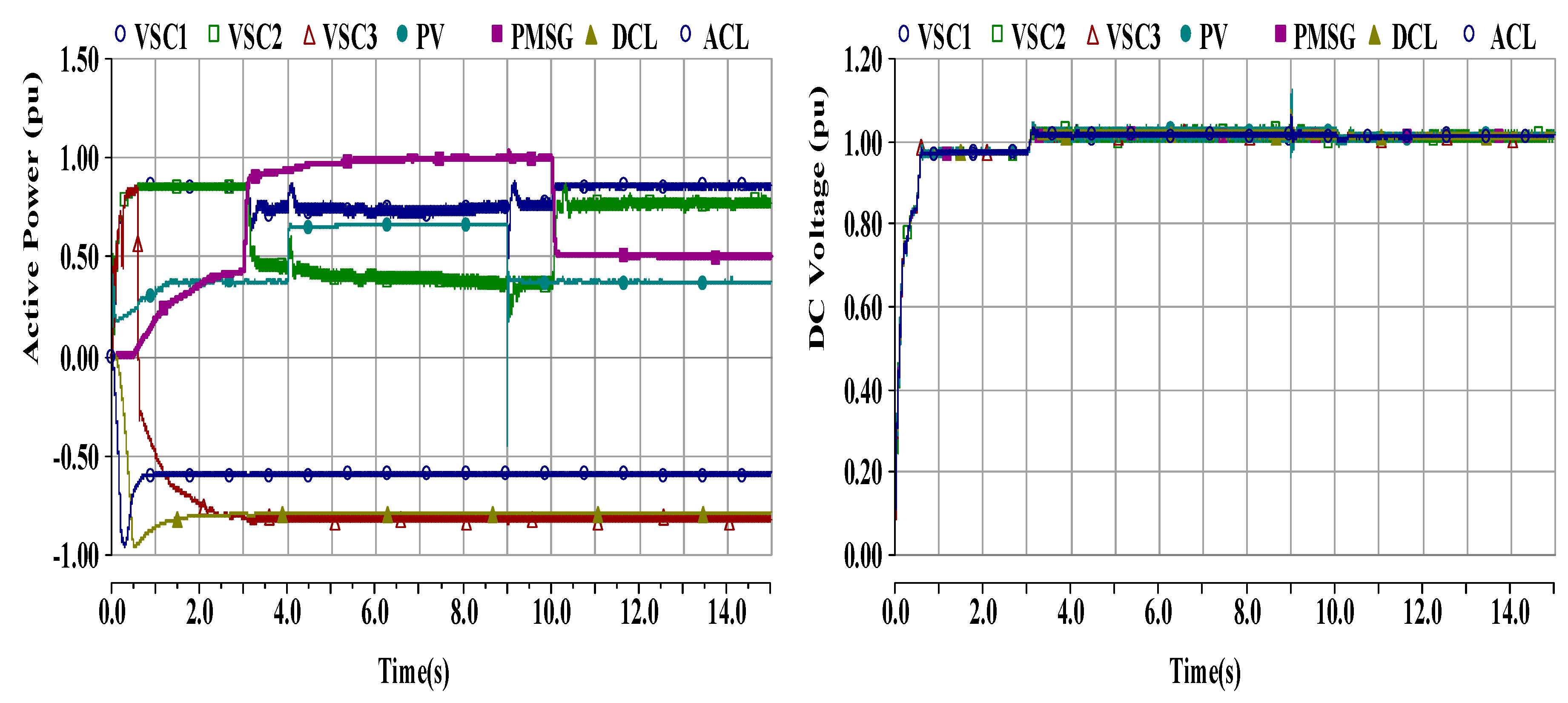
5.2. Simulation Results and Discussion
5.2.1. Case 1: Primary Control
5.2.2. Case 2: Primary and Secondary Control
Scenarios with Non-Optimal and Optimal Secondary Control
Scenario with Optimal Secondary Control
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Reed, G.F.; Grainger, B.M.; Sparacino, A.R.; Mao, Z. Ship to Grid: Medium-Voltage DC Concepts in Theory and Practice. IEEE Power Energy Mag. 2012, 10, 70–79. [Google Scholar] [CrossRef]
- Giannakis, A.; Peftitsis, D. MVDC Distribution Grids and Potential Applications: Future Trends and Protection Challenges. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018. [Google Scholar]
- Stieneker, M.; Doncker, R.W.D. Medium-voltage DC distribution grids in urban areas. In Proceedings of the 2016 IEEE 7th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Vancouver, BC, Canada, 27–30 June 2016. [Google Scholar]
- Gómez-Expósito, A.; Mauricio, J.M.; Maza-Ortega, J.M. VSC-Based MVDC Railway Electrification System. IEEE Trans. Power Deliv. 2014, 29, 422–431. [Google Scholar] [CrossRef]
- Reed, G.F.; Grainger, B.M.; Korytowski, M.J.; Taylor, E.J. Modeling, analysis, and validation of a preliminary design for a 20 kV medium voltage DC substation. In Proceedings of the IEEE 2011 EnergyTech, Cleveland, OH, USA, 25–26 May 2011. [Google Scholar]
- Kusic, G.L.; Reed, G.F.; Svensson, J.; Wang, Z. A case for medium voltage DC for distribution circuit applications. In Proceedings of the 2011 IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011. [Google Scholar]
- Mura, F.; Doncker, R.W.D. Design aspects of a medium-voltage direct current (MVDC) grid for a university campus. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, South Korea, 30 May–3 June 2011. [Google Scholar]
- Korompili, A.; Sadu, A.; Ponci, F.; Monti, A. Flexible Electric Networks of the Future: Project on Control and Automation in MVDC grids. In Proceedings of the International ETG Congress 2015; Die Energiewende - Blueprints for the new energy age, Bonn, Germany, 17–18 November 2015. [Google Scholar]
- Huang, Z.; Ma, J.; Zeng, J.; Gao, Y.; Yuan, Z.; Hu, Z.; Zhao, Y.; Liu, G. Research status and prospect of control and protection technology for DC distribution network. In Proceedings of the 2014 China International Conference on Electricity Distribution (CICED), Shenzhen, China, 23–26 September 2014. [Google Scholar]
- Yang, M.; Xie, D.; Zhu, H.; Lou, Y. Architectures and Control for Multi-terminal DC (MTDC) Distribution Network-A Review. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Aragüés-Peñalba, M.; Egea-Àlvarez, A.; Gomis-Bellmunt, O.; Sumper, A. Optimum voltage control for loss minimization in HVDC multi-terminal transmission systems for large offshore wind farms. Electr. Power Syst. Res. 2012, 89, 54–63. [Google Scholar] [CrossRef]
- Vrana, T.K.; Beerten, J.; Belmans, R.; Fosso, O.B. A classification of DC node voltage control methods for HVDC grids. Electr. Power Syst. Res. 2013, 103, 137–144. [Google Scholar] [CrossRef]
- Pinto, R.T.; Bauer, P.; Rodrigues, S.F.; Wiggelinkhuizen, E.J.; Pierik, J.; Ferreira, B. A Novel Distributed Direct-Voltage Control Strategy for Grid Integration of Offshore Wind Energy Systems Through MTDC Network. IEEE Trans. Ind. Electron. 2013, 60, 2429–2441. [Google Scholar] [CrossRef]
- Gavriluta, C.; Candela, I.; Luna, A.; Gomez-Exposito, A.; Rodriguez, P. Hierarchical Control of HV-MTDC Systems With Droop-Based Primary and OPF-Based Secondary. IEEE Trans. Smart Grid 2015, 6, 1502–1510. [Google Scholar] [CrossRef]
- Meng, K.; Zhang, W.; Li, Y.; Dong, Z.Y.; Xu, Z.; Wong, K.P.; Zheng, Y. Hierarchical SCOPF Considering Wind Energy Integration Through Multiterminal VSC-HVDC Grids. IEEE Trans. Power Syst. 2017, 32, 4211–4221. [Google Scholar] [CrossRef]
- Ji, Y.; Yuan, Z.; Zhao, J.; Lu, C.; Wang, Y.; Zhao, Y.; Li, Y.; Han, Y. Hierarchical control strategy for MVDC distribution network under large disturbance. IET Gener. Transm. Distrib. 2018, 12, 2557–2565. [Google Scholar] [CrossRef]
- Ji, Y.; Yuan, Z.; Zhao, J.; Zhao, Y.; Li, G.; Li, Y. Control scheme for multi-terminal VSC-based medium-voltage DC distribution networks. J. Eng. 2019, 2019, 2935–2940. [Google Scholar] [CrossRef]
- Yousefpoor, N.; Bhattacharya, S. Control and dynamic performance evaluation of Multi-Terminal DC grid. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Simiyu, P.; Xin, A.; Bitew, G.T.; Shahzad, M.; Kunyu, W.; Tuan, L.K. Review of the DC voltage coordinated control strategies for multi-terminal VSC-MVDC distribution network. J. Eng. 2019, 2019, 1462–1468. [Google Scholar] [CrossRef]
- Wang, R.; Chen, L.; Zheng, T.; Mei, S. VSG-based adaptive droop control for frequency and active power regulation in the MTDC system. CSEE J. Power Energy Syst. 2017, 3, 260–268. [Google Scholar] [CrossRef]
- Kuang, Y.; Li, Y.; Wang, W.; Cao, Y. An adaptive virtual synchronous generator control strategy for VSC-MTDC systems and sensitivity analysis of the parameters. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018. [Google Scholar]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, P.B.; Hansen, M.T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Zhong, Q. Virtual Synchronous Machines: A unified interface for grid integration. IEEE Power Electron. Mag. 2016, 3, 18–27. [Google Scholar] [CrossRef]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison Between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, W.; Li, Y.; Tan, Y.; Chen, C.; He, L.; Häger, U.; Rehtanz, C. A Virtual Synchronous Generator Control Strategy for VSC-MTDC Systems. IEEE Trans. Energy Convers. 2018, 33, 750–761. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Li, C.; Li, Y.; Cao, Y.; Zhu, H.; Rehtanz, C.; Häger, U. Virtual Synchronous Generator Control for Damping DC-Side Resonance of VSC-MTDC System. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1054–1064. [Google Scholar] [CrossRef]
- Bathurst, G.; Hwang, G.; Tejwani, L. MVDC—The New Technology for Distribution Networks. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Hunter, L.; Booth, C.; Finney, S.; Ferré, A.J. MVDC Network Balancing for Increased Penetration of Low Carbon Technologies. In Proceedings of the 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Sarajevo, Bosnia-Herzegovina, 21–25 October 2018. [Google Scholar]
- Bibaya, L.; Liu, C.; Li, G. Optimal Hierarchical Voltage Control for VSC-MTDC Distribution Network. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019. [Google Scholar]
- Liu, Y.; Hao, M.; He, Y.; Zang, C.; Zeng, P. Review and Applications of Virtual Synchronous Machines Technologies. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019. [Google Scholar]
- Rouzbehi, K.; Miranian, A.; Luna, A.; Rodriguez, P. DC Voltage Control and Power Sharing in Multiterminal DC Grids Based on Optimal DC Power Flow and Voltage-Droop Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1171–1180. [Google Scholar] [CrossRef]
- Beerten, J.; Cole, S.; Belmans, R. Generalized Steady-State VSC MTDC Model for Sequential AC/DC Power Flow Algorithms. IEEE Trans. Power Syst. 2012, 27, 821–829. [Google Scholar] [CrossRef]
- Khazaei, J.; Miao, Z.; Piyasinghe, L.; Fan, L. Minimizing DC system loss in multi-terminal HVDC systems through adaptive droop control. Electr. Power Syst. Res. 2015, 126, 78–86. [Google Scholar] [CrossRef]
- Hu, B.; Xie, K.; Yang, H.; Jiang, Z. Evaluation model and algorithm for wind farm capacity credit considering effect of storage systems using the bisection method. In Proceedings of the 2014 IEEE PES General Meeting | Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Parameters | Nominal Value |
|---|---|---|
| 1. | Utility AC Voltage/Frequency | 10 kV/50 Hz |
| 2. | Reactor Resistance/Inductance | 0.003 Ω/0.002 H |
| 3. | AC Transformer Ratings | 100 MVA;10/5 kV |
| 4. | VSC 1/2/3 Active Power Rating | 8.1/8.1/8.1 MW |
| 5. | MVDC Link Capacitance | 20000 μF |
| 6. | MVDC Grid Voltage | 10 kV |
| 7. | PMSG rated Voltage/Power | 0.69 kV/5 MVA |
| 8. | PMSG Side Transformer Rating | 0.69/5 kV |
| 9. | PV Array Power | 3.34 MW |
| 10. | PV Array Output Voltage/Vmpp | 5 kV |
| 11. | Boost Converter Inductance | 0.05 H |
| 12. | PV-side Capacitance | 1000 μF |
| 13. | Buck Converter Inductance | 1 H |
| 14. | Buck-side Capacitance | 1000 μF |
| 14. | DC Load Voltage/Power | 4 kV/8.0 MW |
| 15. | AC load Power | 2.0 kV/6.0 MW |
| 16. | π-DC Cable R/ L/C per kM | 139 mΩ/15.9 mH/23.1 μF |
| 17. | Virtual Inertia/Damping Factor | 81 kg.m2/8765 N.m.s/rad |
| From | To | Rline (Ω) |
|---|---|---|
| 1 | 2 | 0.139 |
| 2 | 3 | 0.139 |
| 2 | 4 | 0.139 |
| 2 | 5 | 0.139 |
| 5 | 6 | 0.278 |
| 5 | 7 | 0.139 |
| 7 | 8 | 0.139 |
| 7 | 9 | 0.139 |
| 7 | 10 | 0.139 |
| Node | Type | Power Min (pu) | Power Max (pu) | Droop (p.u) |
|---|---|---|---|---|
| 1 | AC-DC | −1.0 | 1.0 | 0.30 |
| 2 | - | 0.0 | 0.0 | 0.00 |
| 3 | AC-DC | −0.6 | −1.0 | 0.00 |
| 4 | AC-DC | 0.7 | 1.0 | 0.00 |
| 5 | - | 0.0 | 0.0 | 0.00 |
| 6 | AC-DC | −1.0 | 1.0 | 0.15 |
| 7 | - | 0.0 | 0.0 | 0.00 |
| 8 | DC-DC | −0.7 | −0.7 | 0.00 |
| 9 | DC-DC | 0.4 | 0.65 | 0.00 |
| 10 | AC-DC | −1.0 | 1.0 | 0.20 |
| Nodes | Vdc (pu) | P (pu) |
|---|---|---|
| 1 | 1.0111 | 0.8431 |
| 2 | 1.0103 | 0.0000 |
| 3 | 1.0005 | −0.5963 |
| 4 | 1.0200 | 0.5000 |
| 5 | 1.0097 | 0.0000 |
| 6 | 1.0112 | −0.8100 |
| 7 | 1.0084 | 0.0000 |
| 8 | 0.9984 | −0.8000 |
| 9 | 1.0142 | 0.3650 |
| 10 | 1.0114 | 0.7703 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simiyu, P.; Xin, A.; Wang, K.; Adwek, G.; Salman, S. Multiterminal Medium Voltage DC Distribution Network Hierarchical Control. Electronics 2020, 9, 506. https://doi.org/10.3390/electronics9030506
Simiyu P, Xin A, Wang K, Adwek G, Salman S. Multiterminal Medium Voltage DC Distribution Network Hierarchical Control. Electronics. 2020; 9(3):506. https://doi.org/10.3390/electronics9030506
Chicago/Turabian StyleSimiyu, Patrobers, Ai Xin, Kunyu Wang, George Adwek, and Salman Salman. 2020. "Multiterminal Medium Voltage DC Distribution Network Hierarchical Control" Electronics 9, no. 3: 506. https://doi.org/10.3390/electronics9030506
APA StyleSimiyu, P., Xin, A., Wang, K., Adwek, G., & Salman, S. (2020). Multiterminal Medium Voltage DC Distribution Network Hierarchical Control. Electronics, 9(3), 506. https://doi.org/10.3390/electronics9030506