A Compound Control System for FR4-Based Electromagnetic Scanning Micrograting


Abstract
1. Introduction
2. Overview of the FR4-Based Electromagnetic Scanning Micrograting
3. Design of the Compound Control System
3.1. Hardware Design of the System
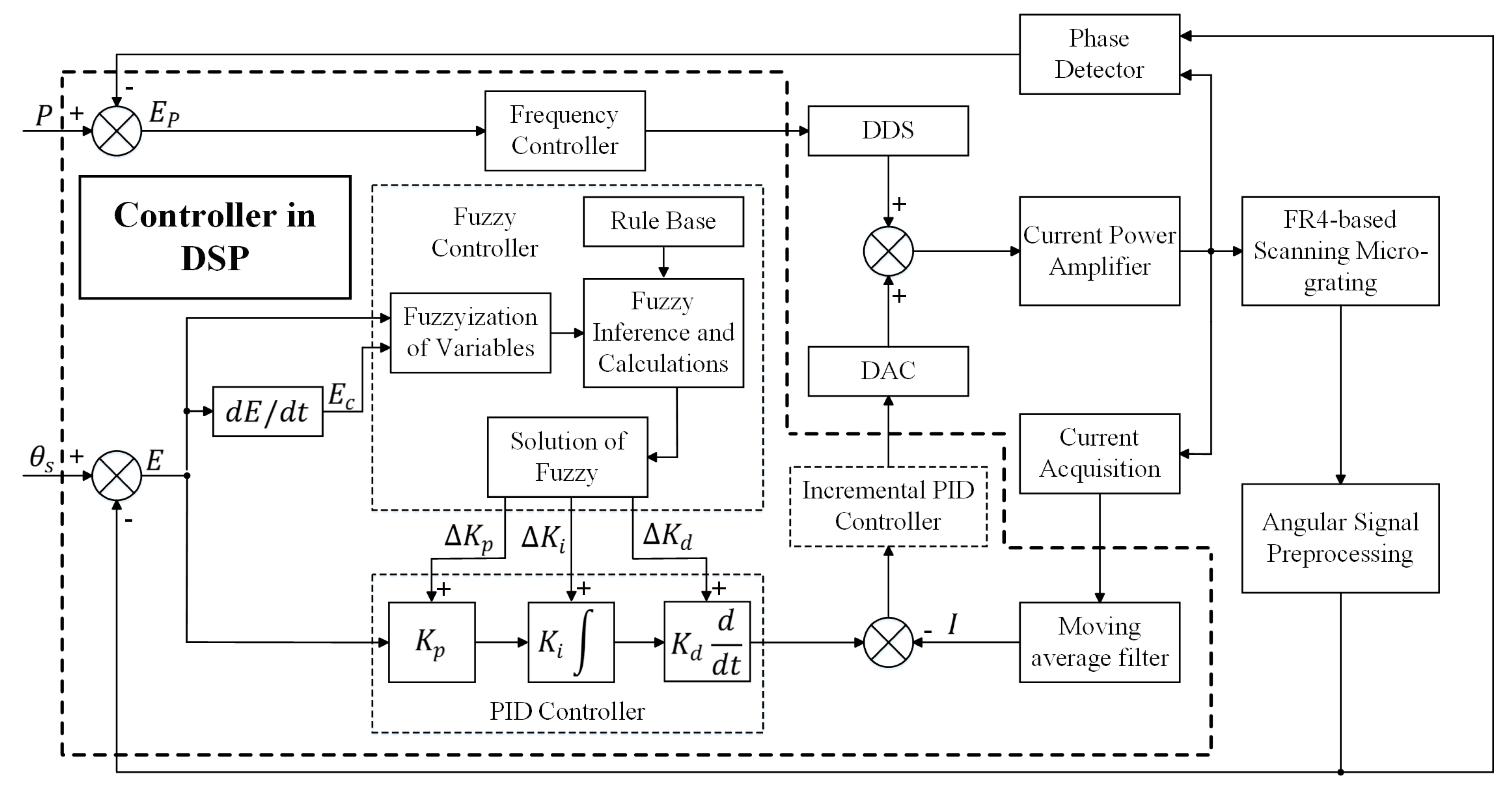
3.2. Control Algorithm Design of the System
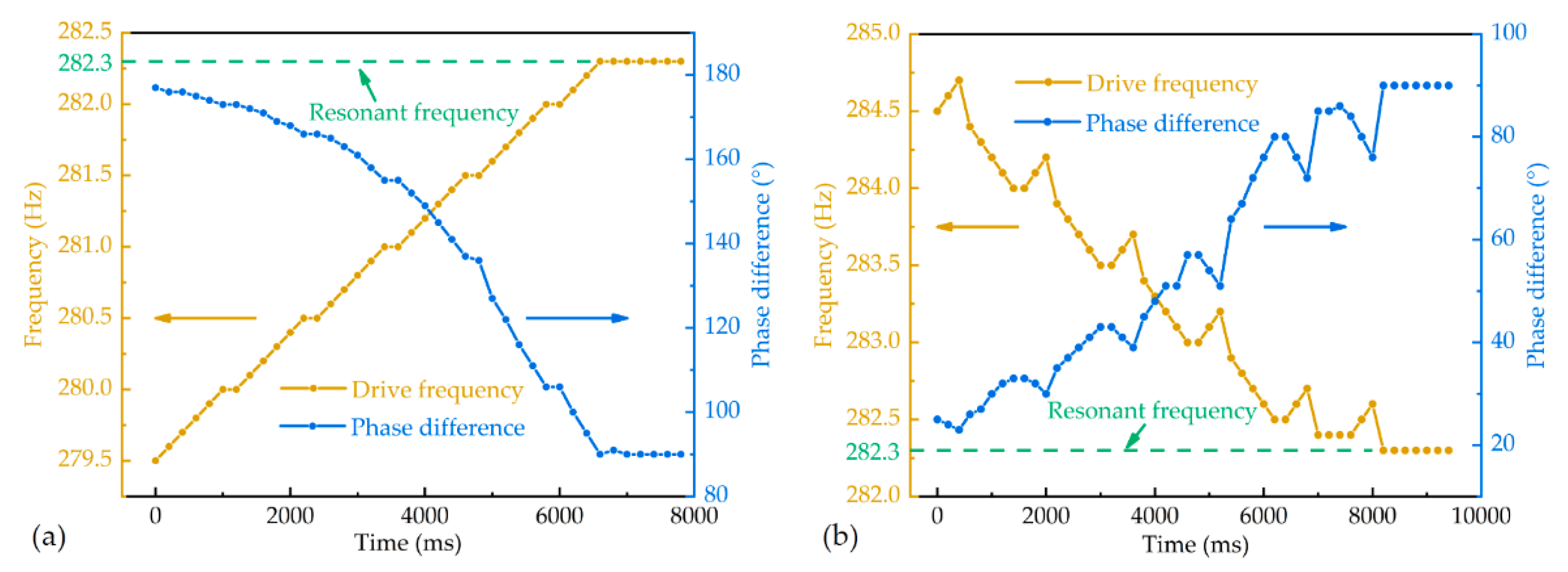
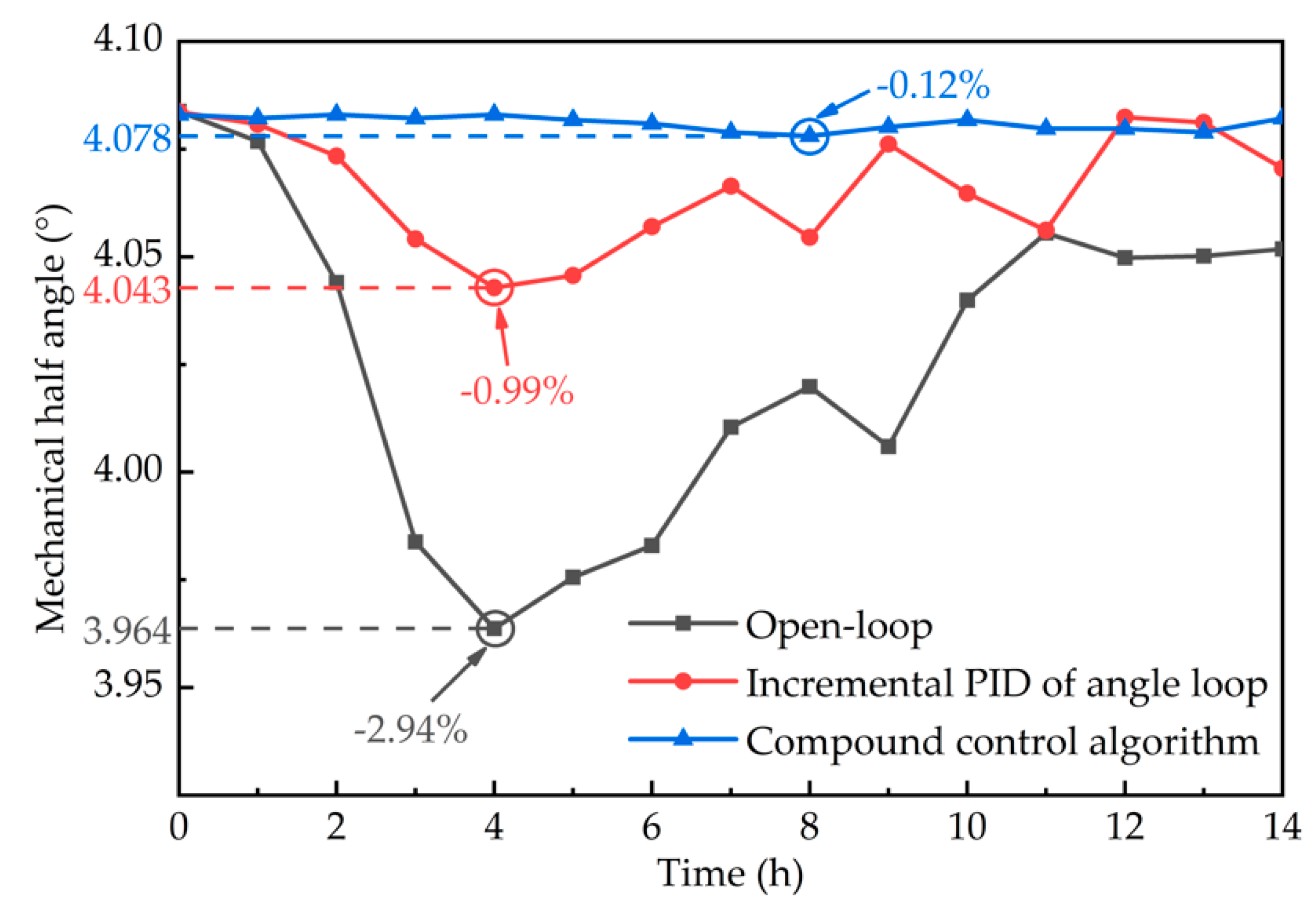
4. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, H.; Wen, Z.; Li, D.; Huang, J.; Zhou, Y.; Guo, P. A Control and Detecting System of Micro-Near-Infrared Spectrometer Based on a MOEMS Scanning Grating Mirror. Micromachines 2018, 9, 152. [Google Scholar] [CrossRef] [PubMed]
- Nicolaï, B.M.; Beullens, K.; Bobelyn, E.; Peirs, A.; Saeys, W.; Theron, K.I.; Lammertyn, J. Nondestructive measurement of fruit and vegetable quality by means of NIR spectroscopy: A review. Postharvest Boil. Technol. 2007, 46, 99–118. [Google Scholar] [CrossRef]
- Giovenzana, V.; Beghi, R.; Parisi, S.; Brancadoro, L.; Guidetti, R. Potential effectiveness of visible and near infrared spectroscopy coupled with wavelength selection for real time grapevine leaf water status measurement. J. Sci. Food Agric. 2017, 98, 1935–1943. [Google Scholar] [CrossRef] [PubMed]
- Porep, J.U.; Kammerer, D.R.; Carle, R. On-line application of near infrared (NIR) spectroscopy in food production. Trends Food Sci. Technol. 2015, 46, 211–230. [Google Scholar] [CrossRef]
- Balage, J.M.; Silva, S.D.L.E.; Gomide, C.A.; Bonin, M.D.N.; Figueira, A.C.; Bonin, M.D.N.; Figueira, A.C. Predicting pork quality using Vis/NIR spectroscopy. Meat Sci. 2015, 108, 37–43. [Google Scholar] [CrossRef]
- Sánchez, N.N.; Martínez-Marín, A.; Polvillo, O.; Fernández-Cabanás, V.M.; Carrizosa, J.; Urrutia, B.; Serradilla, J. Near Infrared Spectroscopy (NIRS) for the determination of the milk fat fatty acid profile of goats. Food Chem. 2016, 190, 244–252. [Google Scholar] [CrossRef]
- De Lima, S.M.; Silva, B.F.A.; Pontes, D.V.; Pereira, C.F.; Stragevitch, L.; Pimentel, M.F. In-line monitoring of the transesterification reactions for biodiesel production using NIR spectroscopy. Fuel 2014, 115, 46–53. [Google Scholar] [CrossRef]
- Huang, J.; Wen, Q.; Nie, Q.; Chang, F.; Zhou, Y.; Wen, Z. Miniaturized NIR Spectrometer Based on Novel MOEMS Scanning Tilted Grating. Micromachines 2018, 9, 478. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Yun, J.; Lim, J.; Gwak, M.-J.; Kim, K.-S. Two-axis Electrostatic Gimbaled Mirror Scanner with Self-aligned Tilted Stationary Combs. IEEE Photon Technol. Lett. 2016, 28, 557–560. [Google Scholar] [CrossRef]
- Han, F.; Wang, W.; Zhang, X.; Xie, H. Modeling and Control of a Large-Stroke Electrothermal MEMS Mirror for Fourier Transform Microspectrometers. J. Microelectromech. Syst. 2016, 25, 1–11. [Google Scholar] [CrossRef]
- Han, F.; Xie, H.; Wang, W.; Zhang, X. Miniature Fourier transform spectrometer with a dual closed-loop controlled electrothermal micromirror. Opt. Express 2016, 24, 22650–22660. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Wen, Q.; Huang, J.; Chang, F. An electromagnetic scanning mirror integrated with blazed grating and angle sensor for a near infrared micro spectrometer. J. Micromech. Microeng. 2017, 27. [Google Scholar] [CrossRef]
- Lei, H.; Wen, Q.; Yu, F.; Zhou, Y.; Wen, Z. FR4-Based Electromagnetic Scanning Micromirror Integrated with Angle Sensor. Micromachines 2018, 9, 214. [Google Scholar] [CrossRef] [PubMed]
- Wen, Q.; Lei, H.; Yu, F.; Li, D.; She, Y.; Huang, J.; Huang, L.; Wen, Z. Investigation of Electromagnetic Angle Sensor Integrated in FR4-Based Scanning Micromirror. Appl. Sci. 2018, 8, 2412. [Google Scholar] [CrossRef]
- Wen, Q.; Lei, H.; Huang, J.; Yu, F.; Huang, L.; Zhang, J.; Li, D.; Peng, Y.; Wen, Z. FR4-based electromagnetic scanning micro-grating integrated with angle sensor for a low-cost NIR micro-spectrometer. Appl. Opt. 2019, 58, 4642–4646. [Google Scholar] [CrossRef] [PubMed]
- Lei, H.; Wen, Q.; Yu, F.; Li, D.; Shang, Z.; Huang, J.; Wen, Z. AlN film based piezoelectric large-aperture MEMS scanning micromirror integrated with angle sensors. J. Micromech. Microeng. 2018, 28. [Google Scholar] [CrossRef]
- Ataman, C.; Urey, H. Compact Fourier transform spectrometers using FR4 platform. Sens. Actuators Phys. 2009, 151, 9–16. [Google Scholar] [CrossRef]
- Han, A.; Cho, A.R.; Ju, S.; Ahn, S.-H.; Bu, J.-U.; Ji, C.-H. Electromagnetic biaxial vector scanner using radial magnetic field. Opt. Express 2016, 24, 15813–15821. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Sun, W.; Yeow, J.T.W. An Enhanced Robust Control Algorithm Based on CNF and ISM for the MEMS Micromirror against Input Saturation and Disturbance. Micromachines 2017, 8, 326. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Sun, W.; Yeow, J.T.W. Internal Model-Based Robust Tracking Control Design for the MEMS Electromagnetic Micromirror. Sensors 2017, 17, 1215. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Symbol | Value | Unit |
|---|---|---|---|
| The area of silicon grating | 11.5 10 | ||
| The thickness of silicon grating | 0.5 | ||
| The grating constant | 4 | ||
| The blaze angle of the grating | 8.6 | ° | |
| The area of the FR4 platform | 12 12 | ||
| The thickness of the FR4 platform | 0.4 | ||
| The parameters of the folded bar | 12/0.7/1.2 | ||
| The number of turns of the driving coil | 16 | - | |
| The number of turns of the sensing coil | 4 | - | |
| The width of the coil and the spacing between the coils | 4/4 | ||
| The strength of the magnetic field | 100 |
| NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/PS/NS | NS/PS/ZO |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/PS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Wen, Q.; Lei, H.; Huang, L.; Wen, Z. A Compound Control System for FR4-Based Electromagnetic Scanning Micrograting. Electronics 2019, 8, 770. https://doi.org/10.3390/electronics8070770
Yu F, Wen Q, Lei H, Huang L, Wen Z. A Compound Control System for FR4-Based Electromagnetic Scanning Micrograting. Electronics. 2019; 8(7):770. https://doi.org/10.3390/electronics8070770
Chicago/Turabian StyleYu, Fan, Quan Wen, Hongjie Lei, Liangkun Huang, and Zhiyu Wen. 2019. "A Compound Control System for FR4-Based Electromagnetic Scanning Micrograting" Electronics 8, no. 7: 770. https://doi.org/10.3390/electronics8070770
APA StyleYu, F., Wen, Q., Lei, H., Huang, L., & Wen, Z. (2019). A Compound Control System for FR4-Based Electromagnetic Scanning Micrograting. Electronics, 8(7), 770. https://doi.org/10.3390/electronics8070770