1. Introduction
Power converters are found in a vast number of applications, such as renewable energy conversion systems, power grids and high-speed trains [
1,
2,
3]. Usually, the power devices of a converter are in a long-term state of high frequency modulation and bear high voltage and large current with relatively serious heating and large switching losses [
4]. In addition, power converters often require uninterrupted operation. Such harsh work conditions may cause a series of problems, like parameter drift and component damage, which would eventually lead to deterioration of power devices performance. It is reported that about 38% of the faults in power converters are caused by the power devices faults [
5]. The power devices faults mainly include open-circuit faults and short faults [
6,
7,
8]. When a short fault occurs, the power device will be burned out at a very limited duration and the short fault will turn to open-circuit fault finally [
9]. When an open-circuit fault occurs in a power device, the adjacent power devices will bear larger current and higher voltage. If the open-circuit fault can not be dealt with in time, the secondary fault will be triggered easily [
10].
Hence, the diagnosis and tolerance of open-circuit faults have become hot topics in the past few decades, but there is a lack of open-circuit fault data, especially in high power fields, such as high-speed trains and power grids. Physical experiment is a way to get open-circuit fault data but it is usually costly and dangerous. The hardware-in-the-loop simulation is more reliable than the off-line simulation and has become an important way to obtain data [
11,
12,
13], but a mathematical model which can represent the power converter with open-circuit faults is needed for the hardware-in-the-loop (HIL) simulation. So the modeling method of open-circuit faults has become an important problem to be solved.
There are two common types of modeling methods for the power converter, the switching function-based method and the controlled source-based method. In the former one, the arms of power converters are simplified as switching functions [
14,
15,
16,
17]. Different kinds of command signals correspond to different switching function values. Then, the model of rectifier or inverter is built as a whole. It is suitable to build the power converter models whose command signals are not very complicated, such as two-level and three-level converters in the normal condition. When open-circuit faults occur, the complexity of command signals increases sharply. Like the three-level converter, there are three kinds of command signals for one arm in the normal condition; when open-circuit faults occur in power devices, there are seven kinds. If open-circuit faults in clamping diodes are also considered, there will be thirteen kinds of operation modes for a single arm, such that the switching function-based method is inapplicable for the open-circuit fault modeling. In the latter one, the converter is equivalent to a controlled source which can be divided into state-space averaging method and dq-domain method [
18,
19,
20]. The major purpose of establishing power converter model by controlled source-based method is the stability analysis of the system. Unfortunately, the inner details of every power device are unfeasible, which leads to difficulty in building the open-circuit fault models. Most of the existing models can only express the power converter in normal condition. The attention focusing on modeling of power converters with open-circuit faults is rare. Recently, a fault-injection platform has been developed in [
21] and used for validation of various fault detection methods in [
22,
23]; it is not a mathematical model, but a circuit model. According to circuit topology, the fault-injection platform is established by commercial encapsulated modules. Note that it is an off-line simulation platform, which can be used for faults testing, but cannot be applied for hardware-in-the-loop simulation and validating the real-time of open-circuit fault detection, diagnosis and tolerance methods. A uniform modeling method is present in [
24], but there is not a model which can represent the power converter with an open-circuit fault in clamping diodes. To the best of our knowledge, there is a lack of work about modeling of power converters which can express the converter with open-circuit faults in any power device and clamping diode.
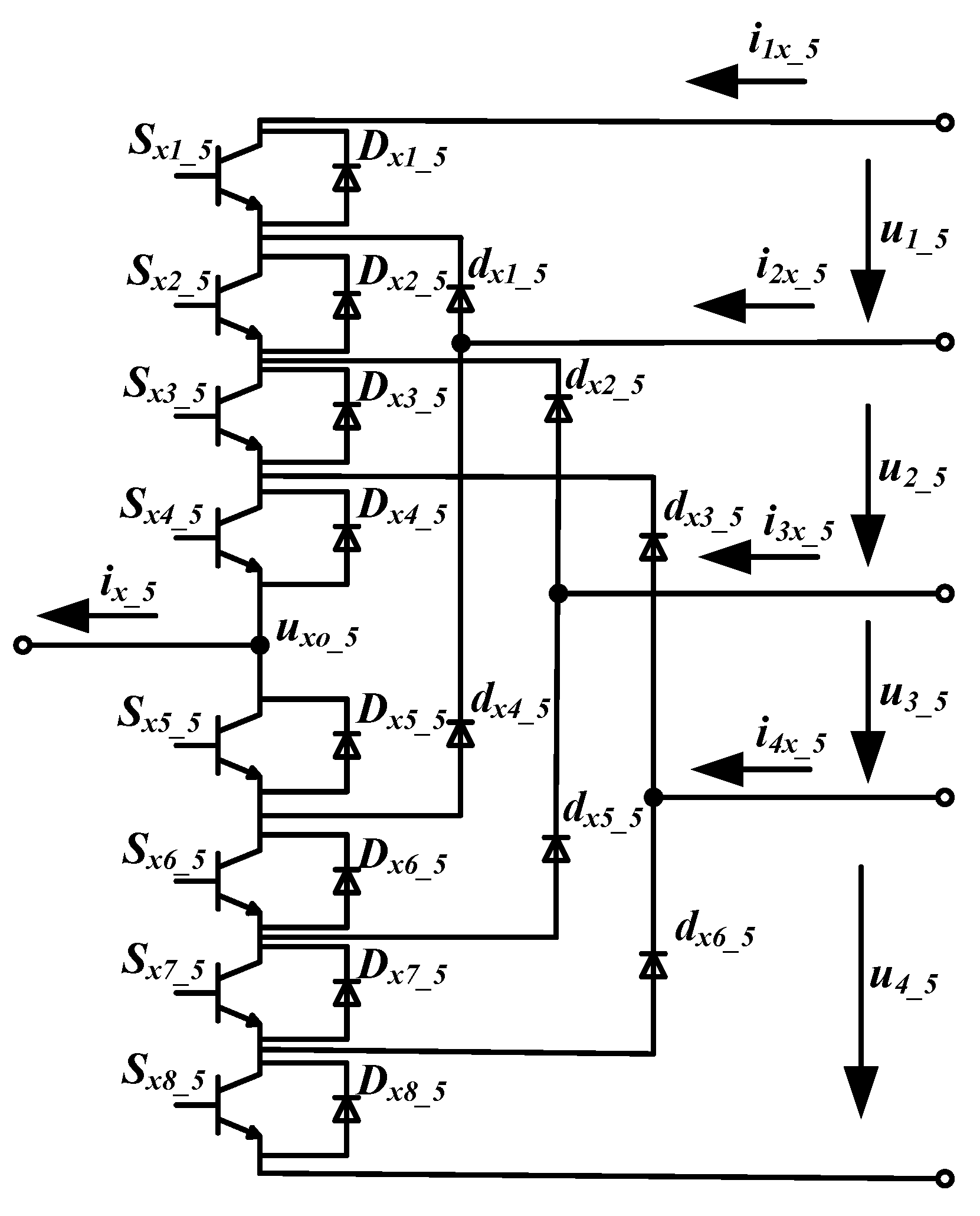
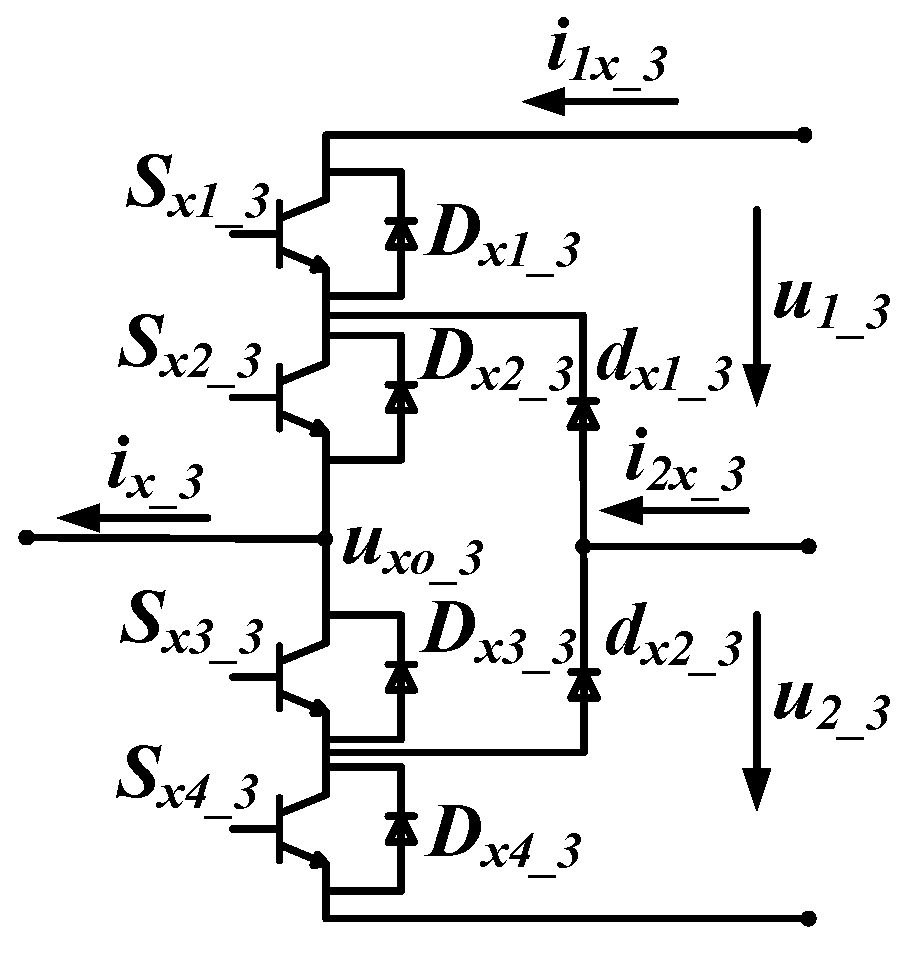
Motivated by the above discussions, a modeling method for power converters based on single arm model is proposed in this paper. To build the model of a power converter, first of all, the inputs and outputs are redefined. After that, the relationship of the inputs and outputs of the single arm are analyzed in open-circuit fault cases. Subsequently, the single arm model is established, which can represent the single arm with open-circuit faults. Finally, combining the circuit topology and the proposed model, the complete model of power converter is built.
There are two main advantages of the modeling method. One is the portability, which has two meanings. First, no matter how many power devices and clamping diodes in the power converter, the model can be established by this method. To be specific, the method can not only build the two and three level converter, but also five and even-higher-levels converters. Second, only a single arm needs to be analyzed instead of the whole power converter in the modeling process. Once the single arm model is established, it can represent all arms with the same structure, so it is the method suitable to build the models of power converters which have several identical arms. The other is the uniformity, the model established by the proposed method can represent the converter not only in normal conditions but also abnormal conditions that open-circuit faults occur in any power devices and clamping diodes. Besides, the model established by the proposed method can be used for real-time simulation. The model can be used for the hardware-in-the-loop simulation and provide a more reliable platform and data source for open-circuit fault detection, diagnosis and tolerance.
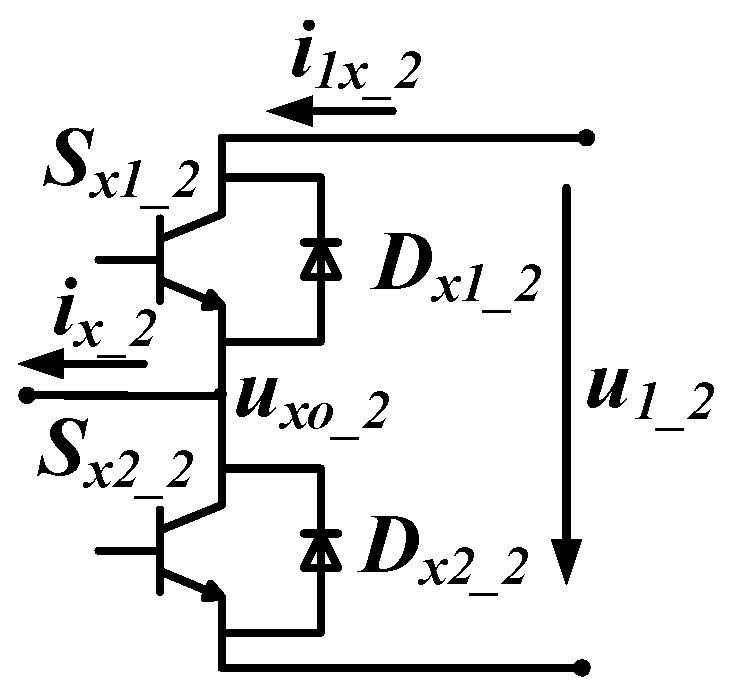
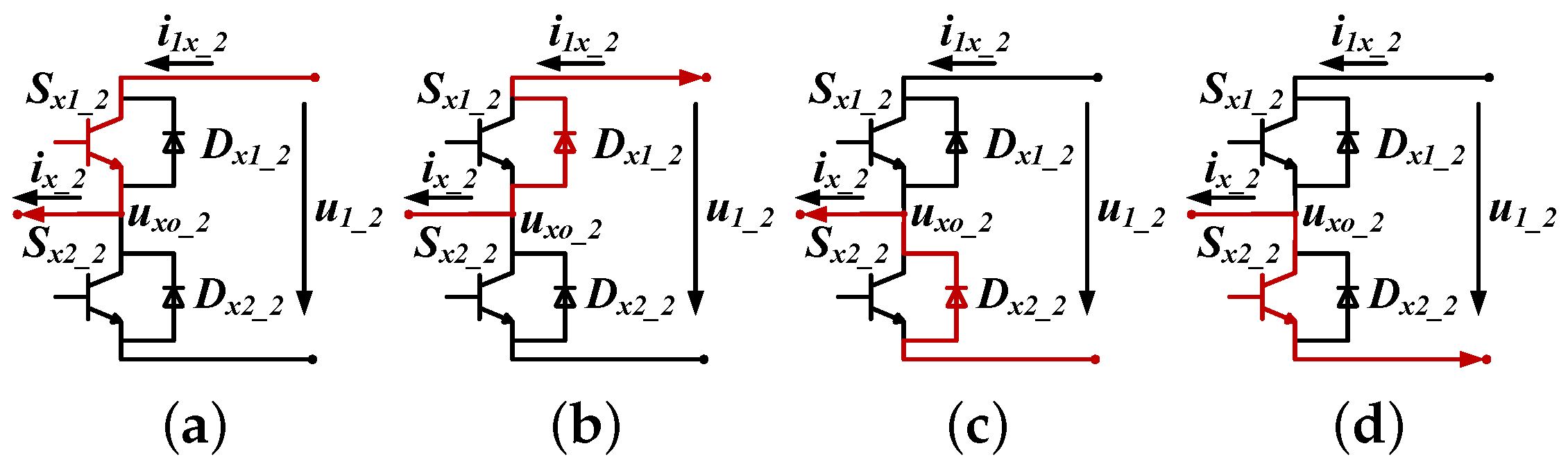
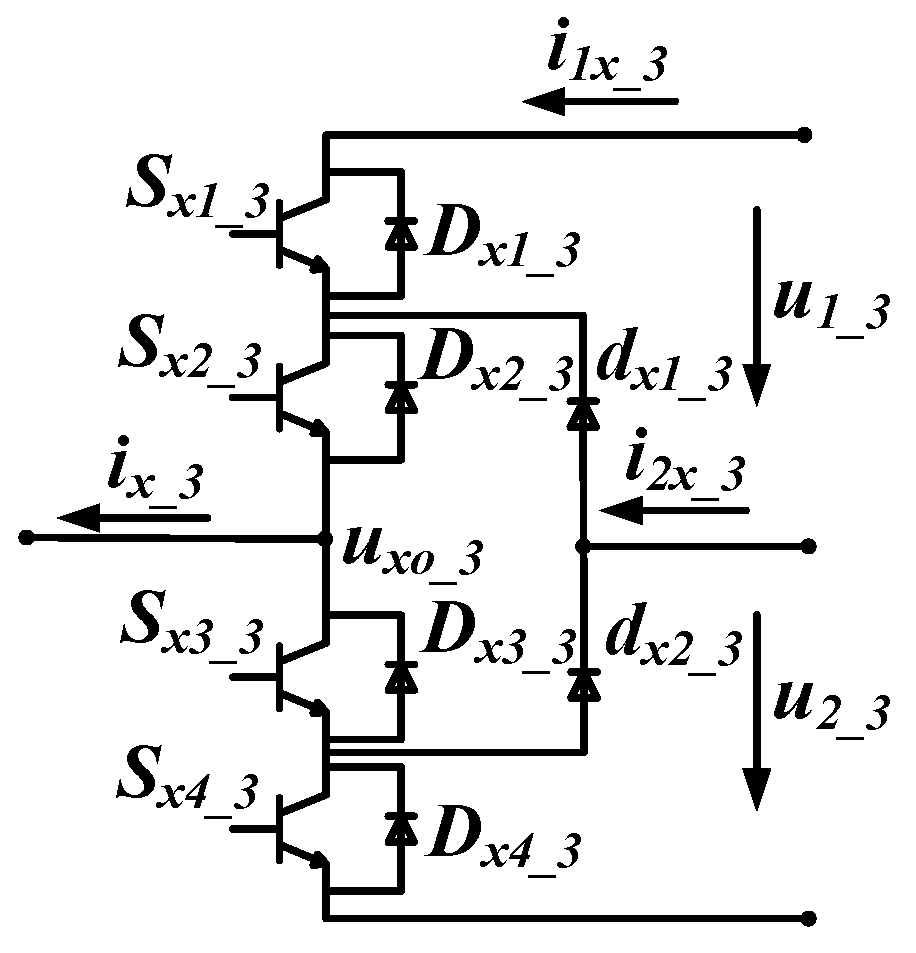
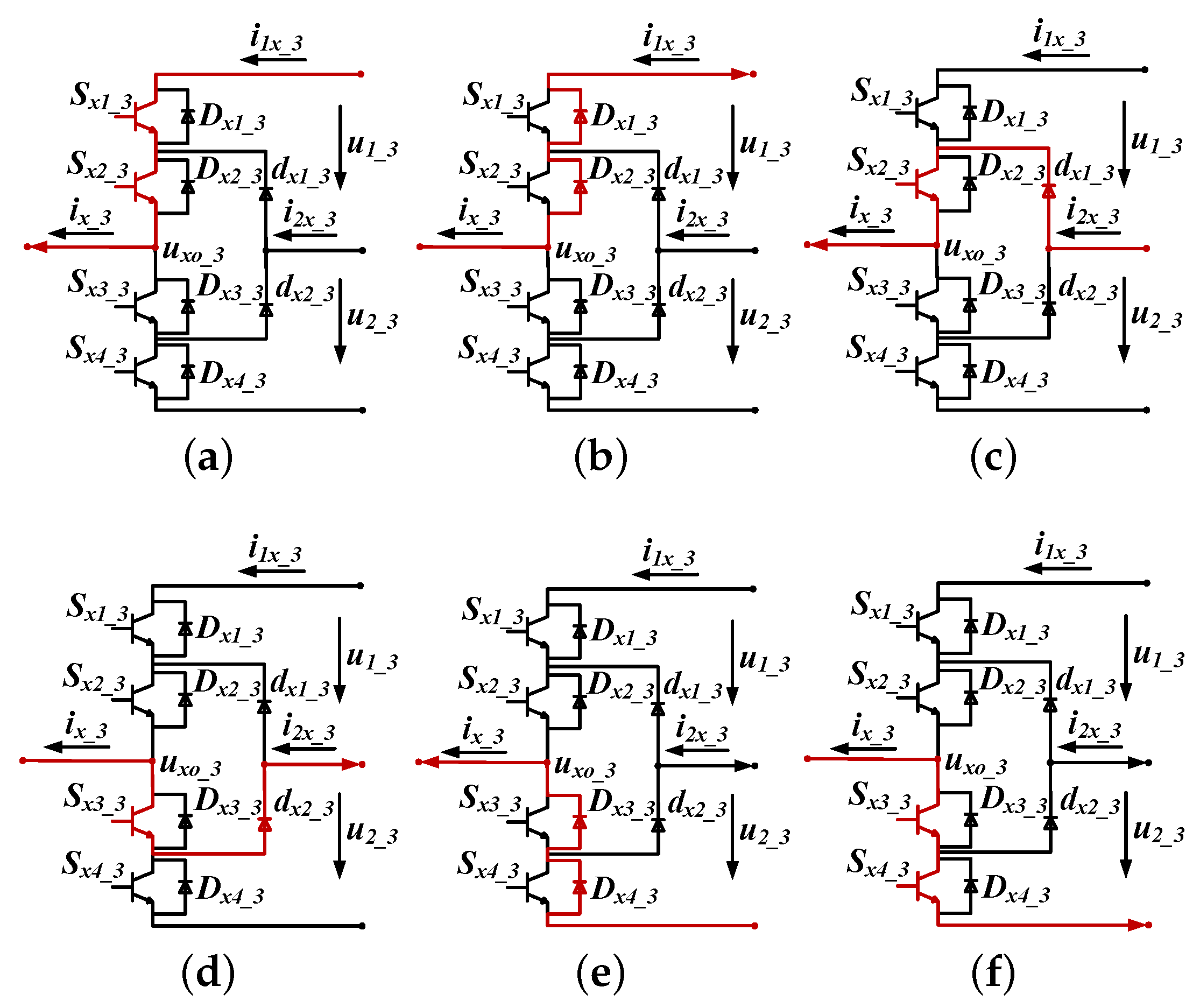
The type of AC–DC–AC converter is chosen to explain the modeling method in detail. The modeling processes of three kinds of single arms are given, which are commonly used in power converters and a general formula is given in
Section 2. Then, the general model of AC–DC–AC converter is built based on the single arm model, which is given in
Section 3. The model can represent the converter when open-circuit fault occurs. In order to verify the effectiveness and accuracy of the model and modeling method proposed, two testing platforms of three-level converters are established, the simulation and experiment results are shown in
Section 4. The conclusions are given in
Section 5.
3. Model of AC-DC-AC Converter
There are
capacitances in the DC-link of
n-level AC-DC-AC converter, the model of the DC-link is built based on state space description as follows:
where
,
...
are the capacitances in the DC-link from top to bottom.
The AC-DC-AC converter consists of the rectifier, inverter and the DC-link. The rectifier and inverter have
arms in total. Combining the single arm model and the DC-link model, the model of the converter is built, which can simulate the system characters when open-circuit faults occurr in any power devices on any arms in the converter. For using real-time simulation, the model of
n-level converter should be solved first [
28]. Euler’s method is chosen as the numerical solver in this paper. The model of
n-level converter is solved by Euler’s method, which is shown in Equation (
6).
is the size of time step for real-time simulation. Then, the timing of the model should be analyzed by static timing analysis [
29]. After the timing constraints are satisfied, the model can run without a conflict of timing. It can be used to acquire the open-circuit faults data and features of
n-level converter expediently.
4. Simulation and Experimental Results
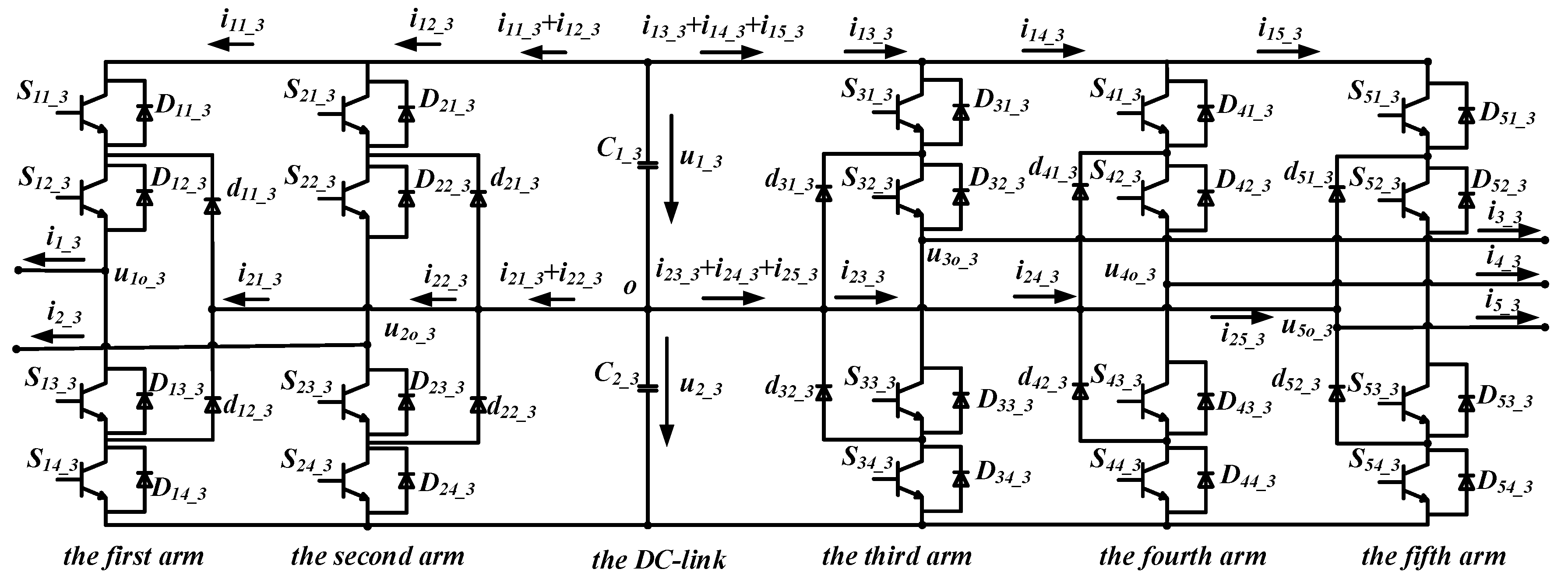
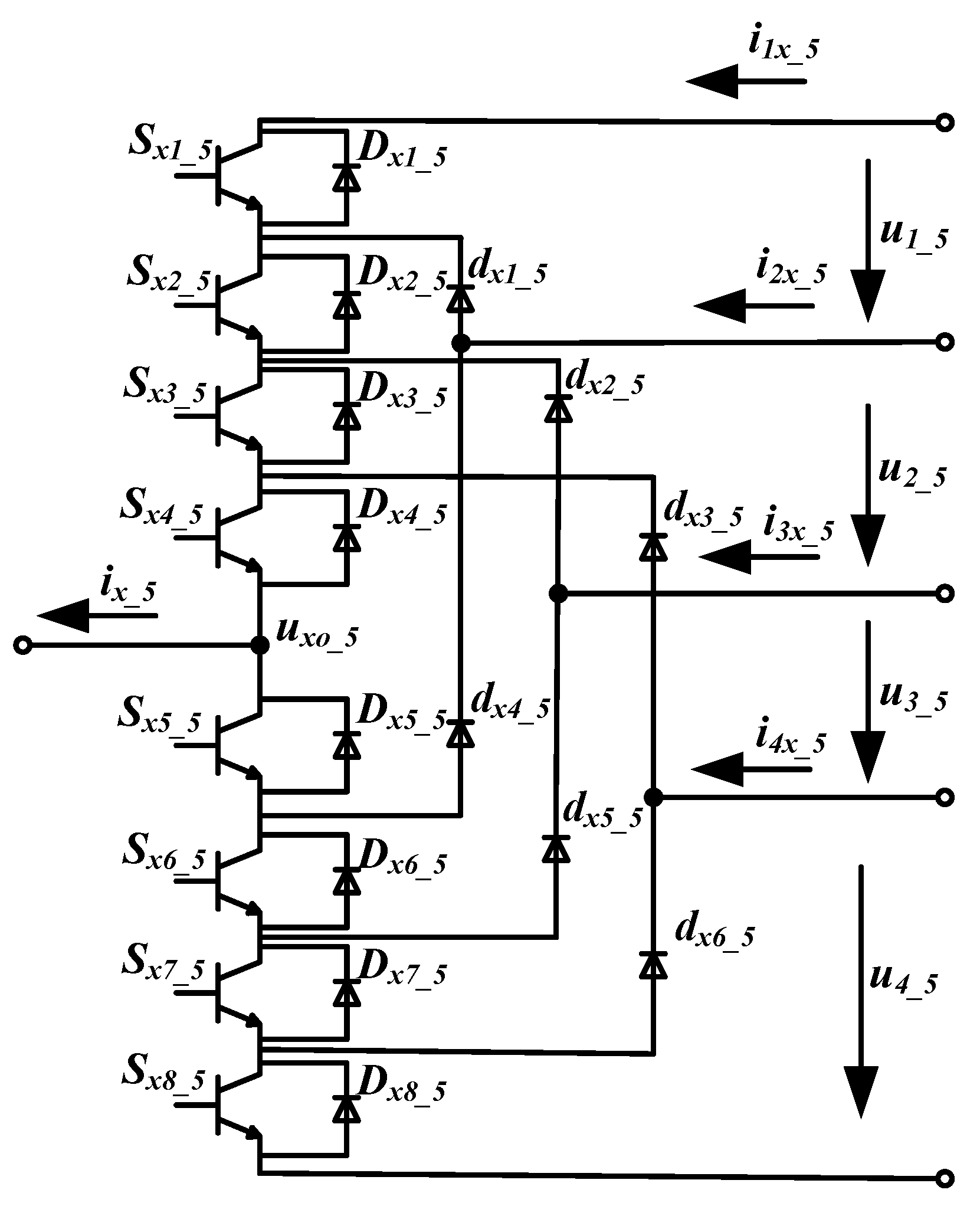
The three-level converter applied in CRH2 high-speed train is chosen to verify the effectiveness and accuracy of the proposed modeling method. The topology of the converter is shown in
Figure 7.
The converter model is established and solved by Euler’s method, which is shown in Equation (
8).
Two testing platforms of a three-level converter are constructed. One is the off-line simulation platform built by commercial encapsulated modules, the time step is 10 us. All parts of the platform are realized in personal computer (PC) and the calculation speed is slow. The software package of this platform is developed [
21,
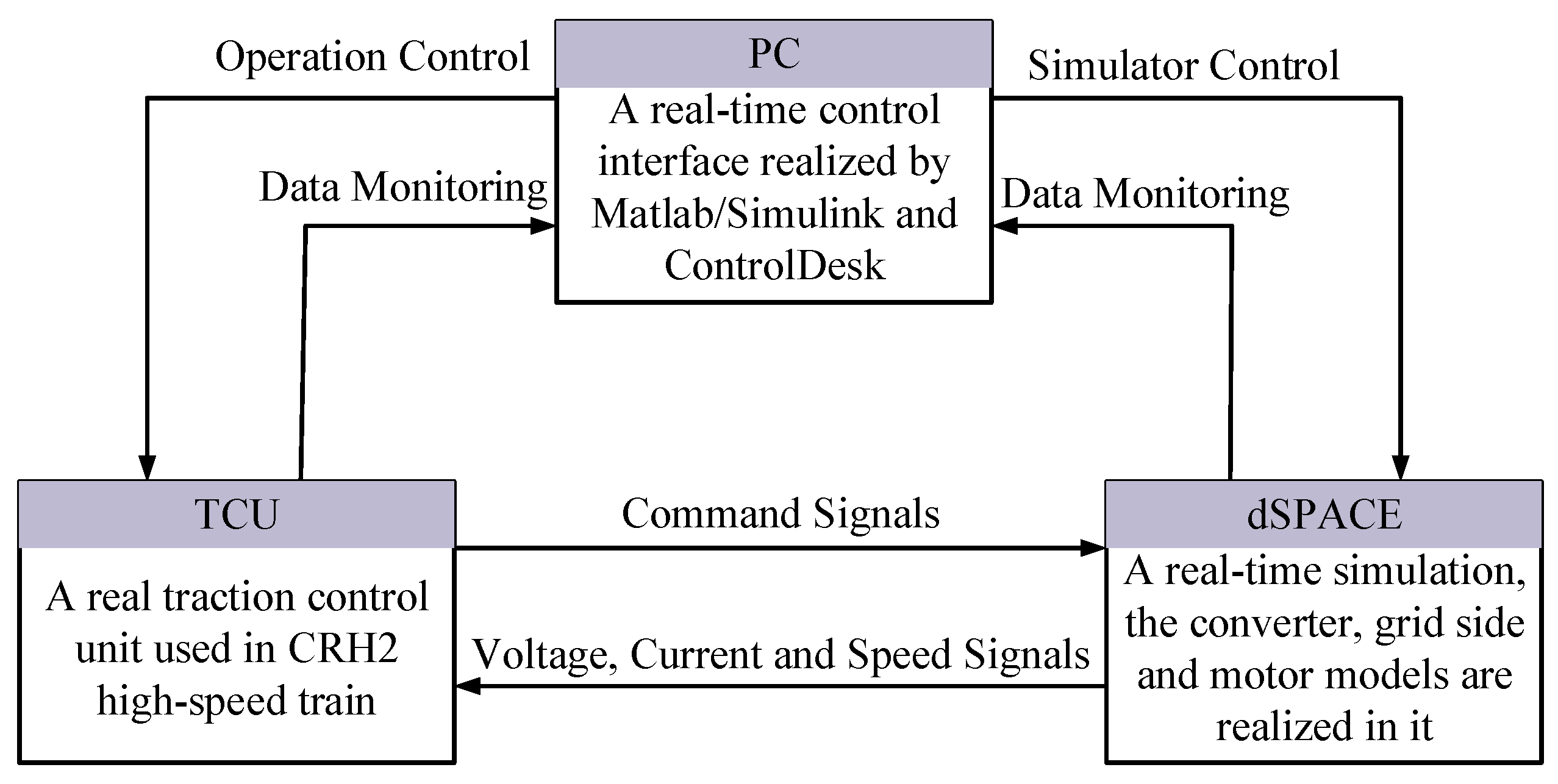
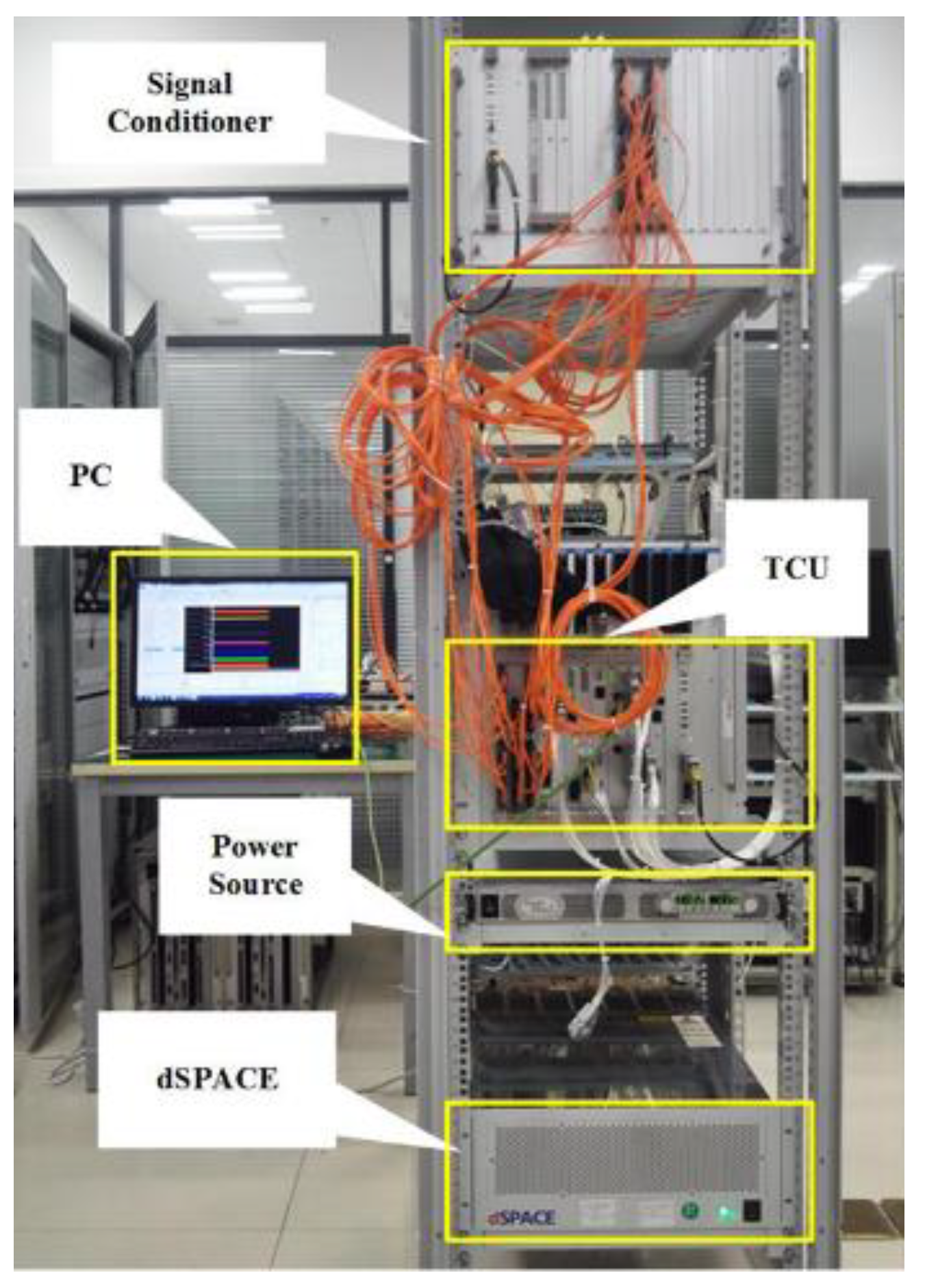
30]. The other is the HIL-based experimental platform established in a Chinese high-speed train manufacturer’s laboratory, which is shown in
Figure 8. A grid side supply to the converter and a traction motor are applied as the load. The experimental platform comprises a real traction control unit (TCU) used in CRH2 high-speed trains, and a computer as a real-time control interface. The hardware circuit, including the model of three-level converter, the grid side model, the traction motor model and the sensors are realized in dSPACE, which is a real-time simulator controlled by the ControlDesk. The open-circuit faults are introduced by changing the command signals of power devices to zero. The TCU gets the current, voltage and speed signals from the dSPACE and sends the command signals to the dSPACE after the A/D conversion and calculations. Combining the Matlab/Simulink and ControlDesk, the real-time control is realized, the time step of the whole system monitoring is 40 us. The models operating in the dSPACE at a time step of 10 ns. The relationship between different parts of the experimental platform is shown in
Figure 9. A comparison between off-line simulation platform and experimental platform is shown in
Table 3. The parameters of the grid side and converter are given in
Table 4, and the parameters of the traction motor are given in
Table 5.
4.1. Open-Circuit Faults in Rectifier
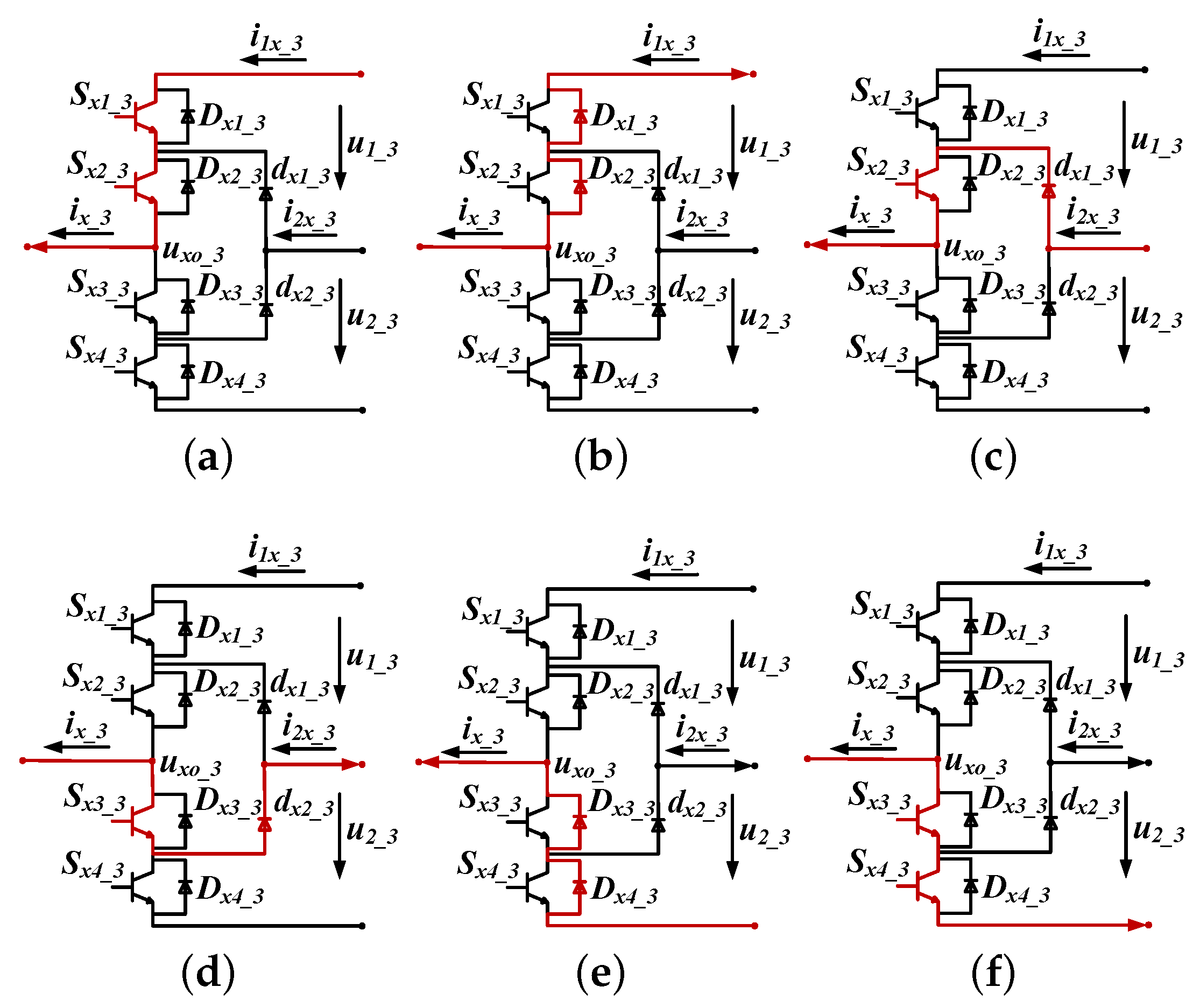
The first arm and second arm are in the rectifier. Because of structural symmetry, the phenomena of open-circuit faults happening in the second arm are similar to open-circuit faults occurring in the first arm. For the rectifier, take the first arm as an example, the results of open-circuit faults are given in
Figure 10. The results are consistent with theoretical analysis. When open-circuit faults occur in
, the current paths are changed while
is positive, so
is influenced in positive phase. The peak value of positive phase decreases, but the fault has little effect on
in negative phase, which is shown in
Figure 10a. When open-circuit faults happen in
, the current paths are changed seriously while
is positive, so the positive phase of
is almost cut off. If
is negative, the current paths do not include
, but in order to stable the power of the three-level converter, the peak value of the negative phase increases, as shown in
Figure 10b. When open-circuit faults occur in
, the influence on
is similar to
, as shown in
Figure 10e. The analysis of open-circuit faults occurring in
,
, and
is similar to open-circuit faults happening in
,
, and
, respectively. The results are shown in
Figure 10c,d,f.
4.2. Open-Circuit Faults in Inverter
The third arm, fourth arm and the fifth arm are in the inverter and have the same structure. The system characteristics of open-circuit faults happening in the fourth arm and the fifth arm are similar to open-circuit faults occurring in the third arm. For the inverter, the third arm is chosen as a representative, the results of open-circuit faults in
,
,
,
,
, and
are given in
Figure 11. The influences of open-circuit faults happening in the third arm are similar to the first arm, but there are three main differences. First, when open-circuit faults occur in
or
, the effect in positive or negative phase are more serious. Second, the inverter is a three-phase supply, when open-circuit faults occur in
or
, although the positive or negative phase is almost cut off, two other phase supplies can provide enough power, the park value of negative or positive phase does not increase obviously. Third, when open-circuit faults occur in
, and
, the influences are similar to
and
, respectively.
The simulation results are obtained by the off-line simulation platform, which is built by commercial encapsulated modules and cannot be used for real-time simulation. The experiment results are acquired by the experimental platform established in a Chinese high-speed train manufacturer’s laboratory, which includes the physical TCU and a real-time simulator. The proposed model is realized in the real-time simulator. The relative error is defined as follows:
When an open-circuit fault occurs, the most obvious change is peak to peak values of the phase current. The
δ of peak to peak values in normal condition are shown in
Table 6. The
δ of peak to peak values in
after open-circuit faults occur in first arm and the
δ of peak to peak values in
after open-circuit faults occur in third arm are shown in
Table 7. The
δ are less than 5% in all conditions, which validates effectiveness and accuracy of the modeling method proposed in this paper.
4.3. Comparison with Existing Models
The comparison between the proposed converter model and existing converter models is summarized in
Table 8. There are five indexes: Mathematical model (is it a mathematical model?); open-circuit faults location (which locations of open-circuit faults can be simulated?); real-time simulation (can it be used for real-time simulation?); portability and uniformity. As we can see in the table, the proposed model has good performance in the indexes mentioned above and the existing models have some shortcomings.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}