Joint Space and Time Processing for Unknown Mutual Coupling Blind Calibration and Mixed Sources Identification Using Uniform Circular Array


Abstract
:1. Introduction
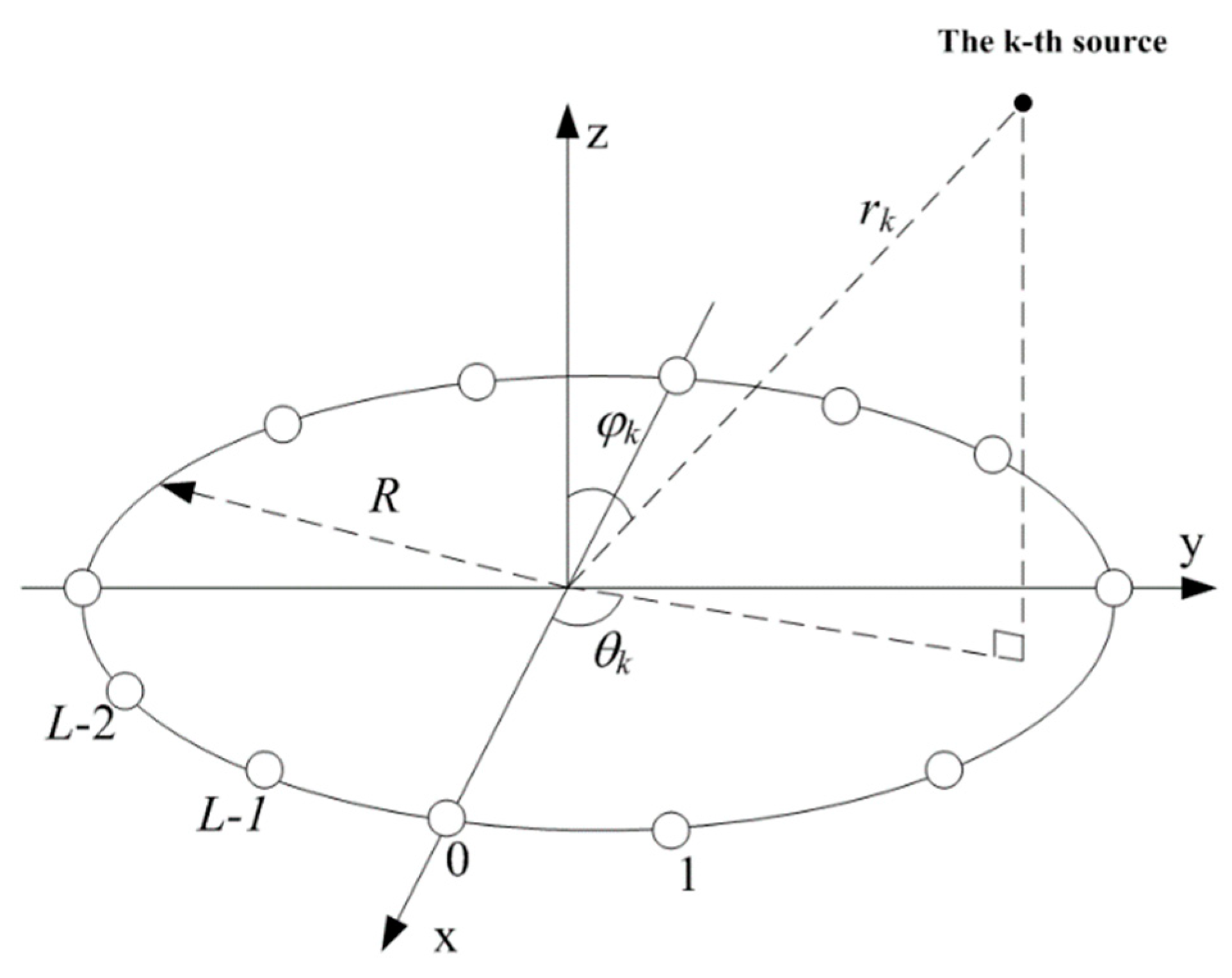
2. Signal Model
- The incoming source signals are statistically independent and zero-mean stationary random process;
- The sensor noise is the additive Gaussian one, which is independent from the source signals;
- The number of sources K1 and K2 are known as prior, and it satisfies K ≤ M.
3. Proposed Solution to Classification and Localization
3.1. Space–Time Covariance Matrix
3.2. FF Sources DOA and MCCs Estimation
3.3. NF Sources DOA Estimation
3.4. NF Sources Range Estimation
3.5. The Proposed Algorithm Summary
- STEP 1.
- Estimate the STP covariance matrix through Formula (19).
- STEP 2.
- Eigen decompose the STP covariance matrix to generate its noise subspace.
- STEP 3.
- Estimate the FF sources’ DOAs through the RERA estimator by Formula (32) or (33).
- STEP 4.
- Obtain the MCCs by Formula (34), and construct the MCM by Formula (6).
- STEP 5.
- Compensate the MCM and by Formula (40).
- STEP 6.
- Construct the differencing matrix by Formula (45).
- STEP 7.
- Eigen decompose the differencing matrix to generate its noise subspace.
- STEP 8.
- Estimate the DOAs of NF sources through Formula (52) or (53).
- STEP 9.
- Estimate the range parameter of NF sources through Formula (54).
4. Discussion
4.1. Number of Required Array Elements
4.2. Contribution of STP
4.3. Computational Complexity
4.4. Capacity for Mixed Sources Classification
4.5. DOA Ambiguity
5. Simulation Results
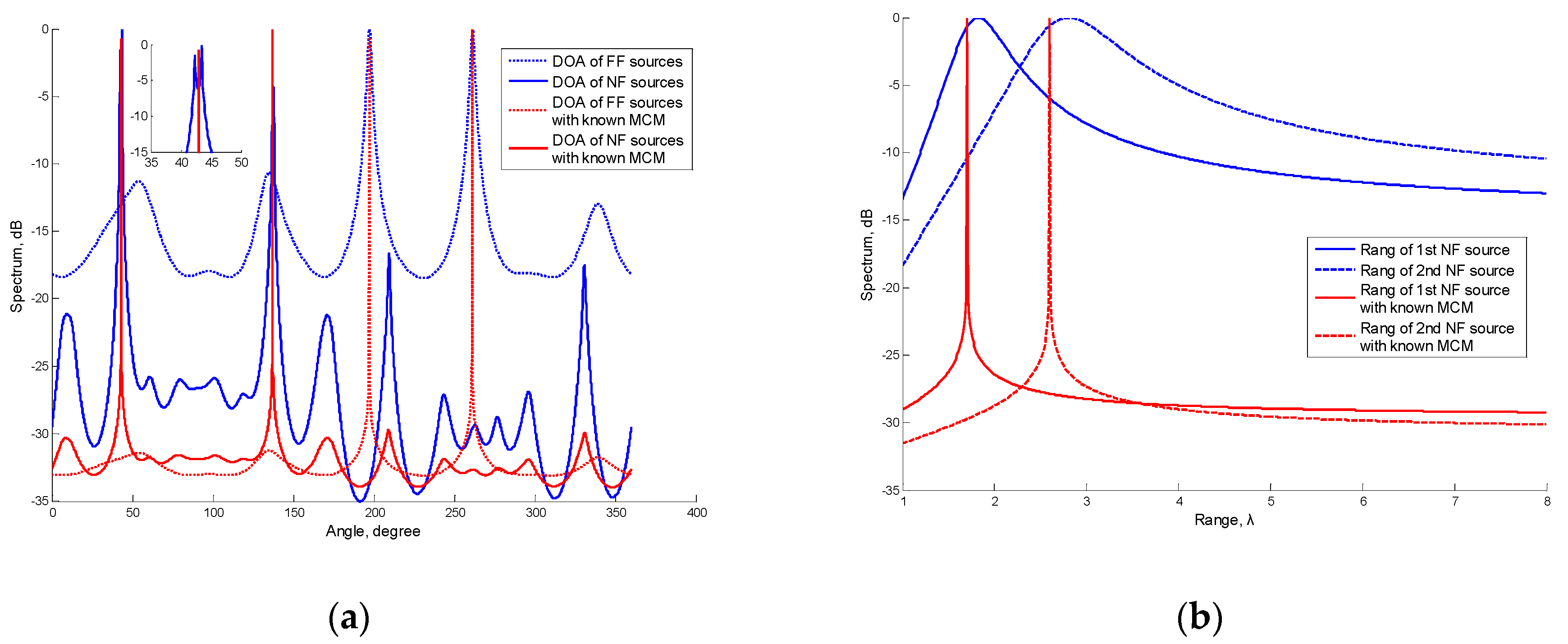
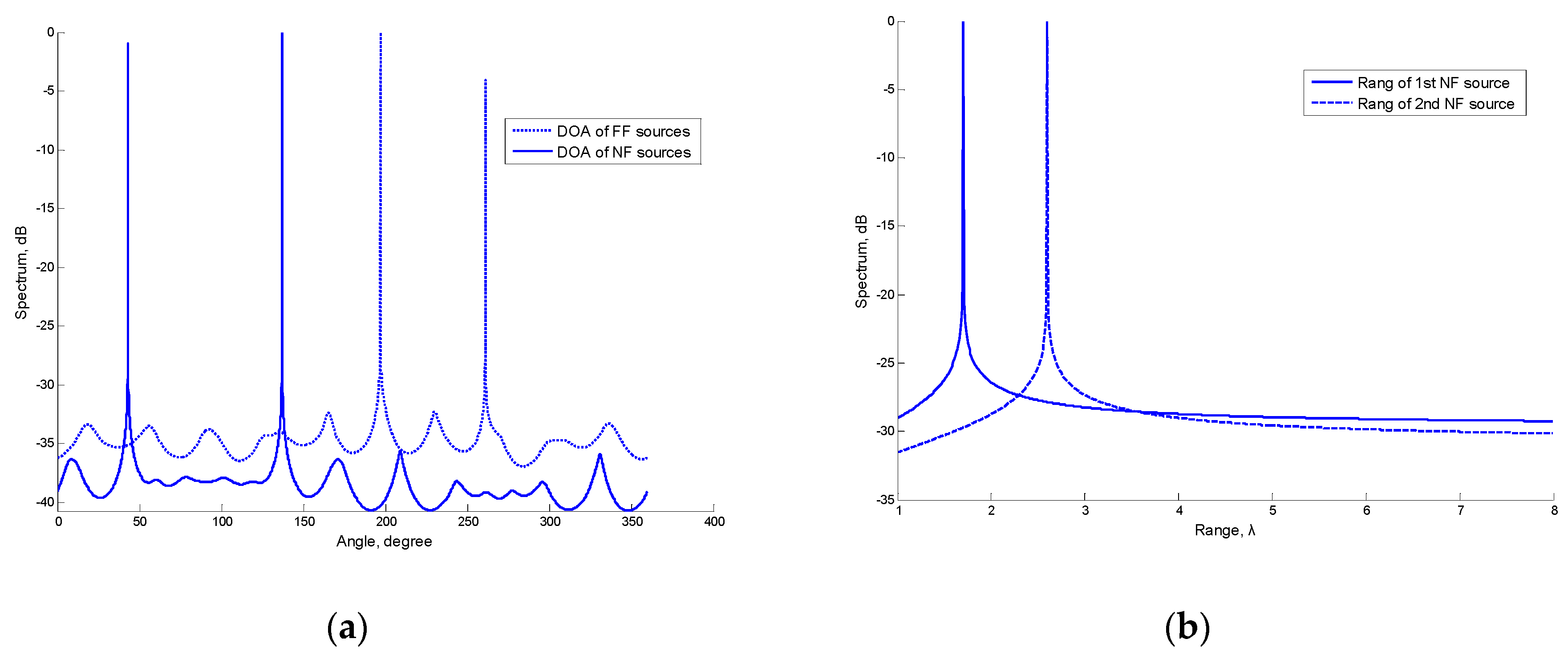
5.1. Spectrums of DOA and Range Estimation
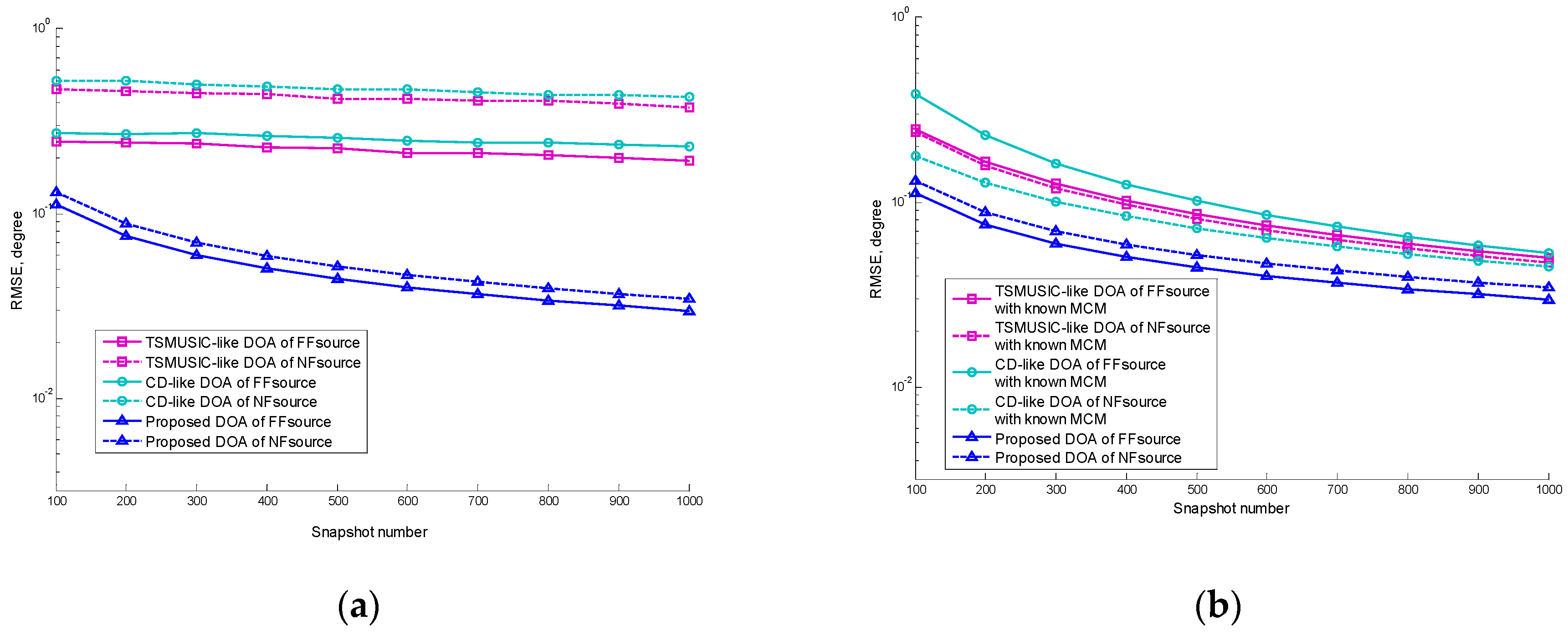
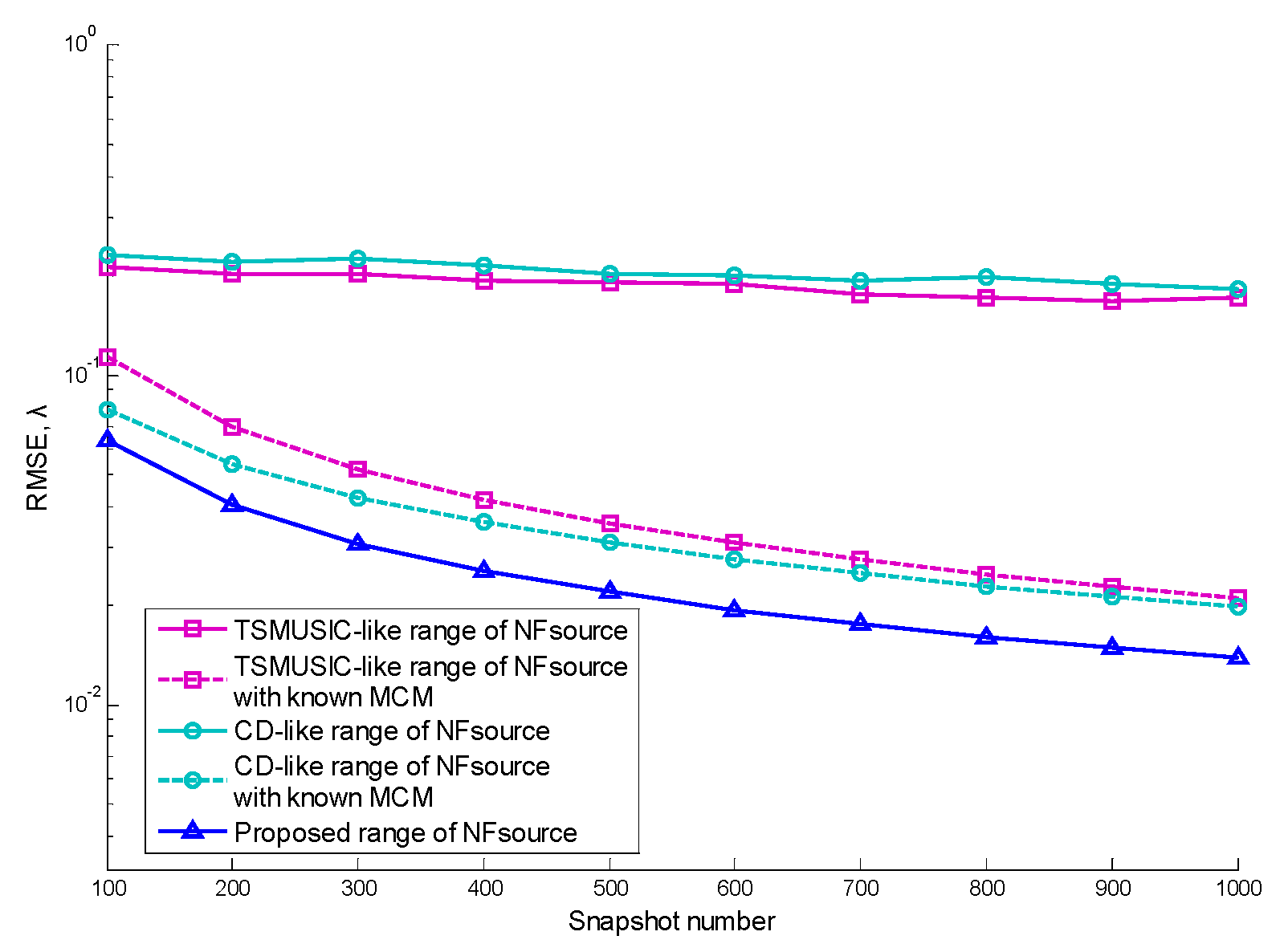
5.2. Performance versus Snapshot Number
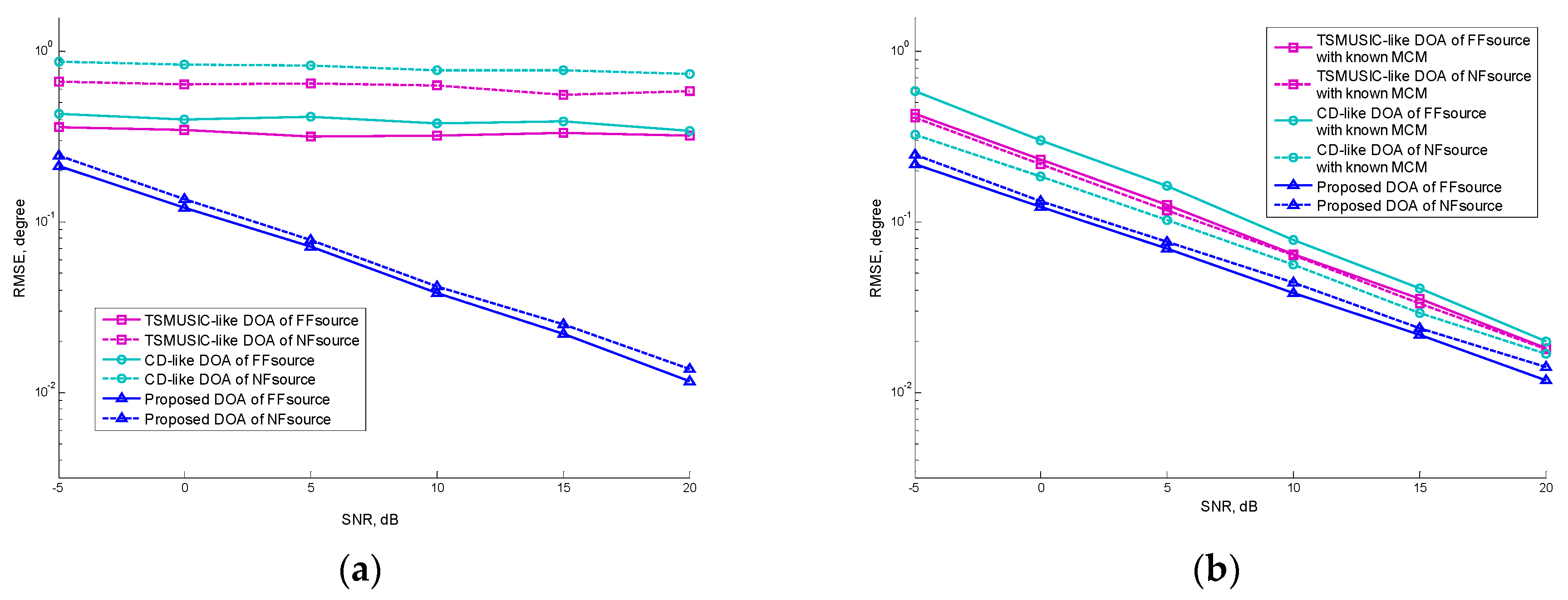
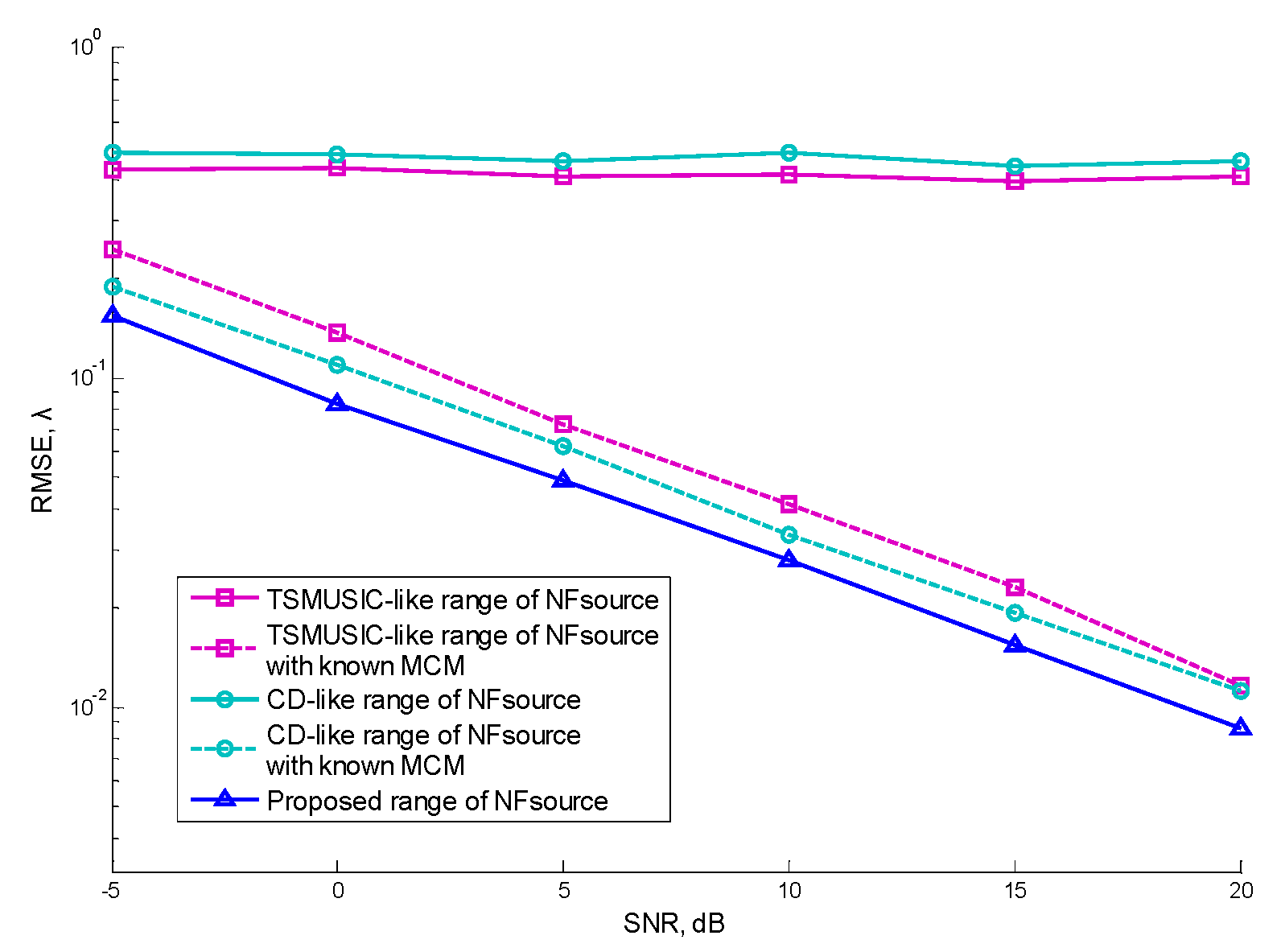
5.3. Performance versus SNR
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Cao, M.Y.; Huang, L.; Qian, C.; Xue, J.Y.; So, H.C. Underdetermined DOA estimation of quasi-stationary signals via Khatri–Rao structure for uniform circular array. Signal Process. 2015, 106, 41–48. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Qian, C.; Huang, L.; SO, H.C. Computationally efficient ESPRIT algorithm for direction-of-arrival estimation based on Nyström method. Signal Process. 2014, 94, 74–80. [Google Scholar] [CrossRef]
- Wang, Y.; Trinkle, M.; NG, B.W.-H. DOA estimation under unknown mutual coupling and multipath with improved effective array aperture. Sensors 2015, 15, 30856–30869. [Google Scholar] [CrossRef]
- Huang, Y.; Barkat, M. Near-field multiple source localization by passive sensor array. IEEE Trans. Antennas Propag. 1991, 39, 968–975. [Google Scholar] [CrossRef]
- Zhi, W.; Chia, M.Y.W. Near-field source localization via symmetric subarrays. IEEE Signal Process. Lett. 2007, 14, 409–412. [Google Scholar] [CrossRef]
- He, J.; Ahmad, M.O.; Swamy, M. Near-field localization of partially polarized sources with a cross-dipole array. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 857–870. [Google Scholar] [CrossRef]
- Tao, J.; Liu, L.; Lin, Z. Joint DOA, range, and polarization estimation in the Fresnel region. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2657–2672. [Google Scholar] [CrossRef]
- Xie, J.; Tao, H.; Rao, X.; Su, J. Efficient method of passive localization for near-field noncircular sources. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1223–1226. [Google Scholar] [CrossRef]
- Xie, J.; Tao, H.; Rao, X.; Su, J. Real-valued localisation algorithm for near-field non-circular sources. Electron. Lett. 2015, 51, 1330–1331. [Google Scholar] [CrossRef]
- Lee, J.; Chen, Y.; Yeh, C. Covariance approximation method for near-field direction-finding using a uniform linear array. IEEE Trans. Signal Process. 1995, 43, 1293–1298. [Google Scholar]
- Noh, H.; Lee, C.A. covariance approximation method for near-field coherent sources localization using uniform linear array. IEEE J. Ocean. Eng. 2015, 40, 187–195. [Google Scholar] [CrossRef]
- Grosicki, E.; Abed-Meraim, K.; Hua, Y. A weighted linear prediction method for near-field source localization. IEEE Trans. Signal Process. 2005, 53, 3651–3660. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. Passive localization of near-field sources using cumulant. IEEE Sens. J. 2009, 9, 953–960. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. Passive localization of mixed near-field and far-field sources using two-stage MUSIC algorithm. IEEE Trans. Signal Process. 2010, 58, 108–120. [Google Scholar] [CrossRef]
- He, J.; Swamy, M.N.S.; Ahmad, M.O. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources. IEEE Trans. Signal Process. 2012, 60, 2066–2070. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Sun, X. Mixed sources localization based on sparse signal reconstruction. IEEE Signal Process. Lett. 2012, 19, 487–490. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, Y.; Liu, J. Mixed-order MUSIC algorithm for localization of far-field and near-field sources. IEEE Signal Process. Lett. 2013, 20, 311–314. [Google Scholar] [CrossRef]
- Liu, G.; Sun, X. Two-stage matrix differencing algorithm for mixed far-field and near-field sources classification and localization. IEEE Sens. J. 2014, 14, 1957–1965. [Google Scholar]
- Liu, G.; Sun, X.; Liu, Y.; Qin, Y. Low-complexity estimation of signal parameters via rotational invariance techniques algorithm for mixed far-field and near-field cyclostationary sources localization. IET Signal Process. 2013, 7, 382–388. [Google Scholar] [CrossRef]
- Jiang, J.; Duan, F.; Chen, J.; Li, Y.; Hua, X. Mixed near-field and far-field sources localization using the uniform linear sensor array. IEEE Sens. J. 2013, 13, 3136–3143. [Google Scholar] [CrossRef]
- Ye, Z.; Dai, J.; Xu, X.; Wu, X. DOA estimation for uniform linear array with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 280–288. [Google Scholar]
- Xu, X.; Ye, Z.; Zhang, Y. DOA estimation for mixed signals in the presence of mutual coupling. IEEE Trans. Signal Process. 2009, 57, 3523–3532. [Google Scholar] [CrossRef]
- Liu, C.; Ye, Z.; Zhang, Y. DOA estimation based on fourth-order cumulants with unknown mutual coupling. Signal Process. 2009, 89, 1819–1843. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Z.G.; Chan, S.C. DOA estimation and tracking of ULAs with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef]
- Xie, J.; Tao, H.; Rao, X.; Su, J. Localization of mixed far-field and near-field sources under unknown mutual coupling. IEEE Trans. Signal Process. 2016, 50, 229–239. [Google Scholar] [CrossRef]
- Wu, Y.; So, H.C. Simple and accurate two dimensional angle estimation for a single source with uniform circular array. IEEE Antennas Wirel. Propag. Lett. 2008, 7, 78–80. [Google Scholar]
- Goossens, R.; Rogier, H. A hybrid UCA-RARE/Root-MUSIC approach for 2-D direction of arrival estimation in uniform circular arrays in the presence of mutual coupling. IEEE Trans. Antennas Propag. 2007, 55, 841–849. [Google Scholar] [CrossRef]
- Qi, C.; Wang, Y.; Zhang, Y.; Chen, H. DOA estimation and self-calibration algorithm for uniform circular array. Electron. Lett. 2009, 41, 1092–1094. [Google Scholar] [CrossRef]
- Lin, M.; Yang, L. Blind calibration and DOA estimation with uniform circular arrays in the presence of mutual coupling. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 315–318. [Google Scholar] [CrossRef]
- Xiang, L.; Ye, Z.; Xu, X.; Chang, C.; Xu, W.; Hung, Y.S. Direction of arrival estimation for uniform circular array based on fourth-order cumulants in the presence of unknown mutual coupling. IET Microw. Antennas Propag. 2008, 2, 281–287. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, H.; Zhang, Y.; Wang, Y. Multiple near-field source localisation with uniform circular array. Electron. Lett. 2013, 49, 1509–1510. [Google Scholar] [CrossRef]
- Xue, B.; Fang, G.; Ji, Y. Passive localisation of mixed far-field and near-field sources using uniform circular array. Electron. Lett. 2016, 52, 1690–1692. [Google Scholar] [CrossRef]
- Cristallini, D.; Burger, W. A Robust Direct Data Domain Approach for STAP. IEEE Trans. Signal Process. 2012, 60, 1283–1294. [Google Scholar] [CrossRef]
- Ahmadi, M.; Mohamed-pour, K. Robust space-time adaptive processing against Doppler and direction-of-arrival mismatches. In Proceedings of the Microwaves, Radar and Remote Sensing Symposium, Kiev, Ukraine, 25–27 August 2011; pp. 305–308. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Statistical Matrices | EVDs | Spectral Search |
|---|---|---|---|
| TSMUSIC-like | |||
| CD-like | |||
| Proposed |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Wang, L.; Xie, J.; Wang, Y.; Zhang, Z. Joint Space and Time Processing for Unknown Mutual Coupling Blind Calibration and Mixed Sources Identification Using Uniform Circular Array. Electronics 2019, 8, 525. https://doi.org/10.3390/electronics8050525
Wang K, Wang L, Xie J, Wang Y, Zhang Z. Joint Space and Time Processing for Unknown Mutual Coupling Blind Calibration and Mixed Sources Identification Using Uniform Circular Array. Electronics. 2019; 8(5):525. https://doi.org/10.3390/electronics8050525
Chicago/Turabian StyleWang, Kai, Ling Wang, Jian Xie, Yuexian Wang, and Zhanolin Zhang. 2019. "Joint Space and Time Processing for Unknown Mutual Coupling Blind Calibration and Mixed Sources Identification Using Uniform Circular Array" Electronics 8, no. 5: 525. https://doi.org/10.3390/electronics8050525
APA StyleWang, K., Wang, L., Xie, J., Wang, Y., & Zhang, Z. (2019). Joint Space and Time Processing for Unknown Mutual Coupling Blind Calibration and Mixed Sources Identification Using Uniform Circular Array. Electronics, 8(5), 525. https://doi.org/10.3390/electronics8050525