A Data-Driven Based Voltage Control Strategy for DC-DC Converters: Application to DC Microgrid

 ,
, 
 ,
,  , and
, and
Abstract
:1. Introduction
- DC-DC power converters are characterized by three different modes of operation, namely rising inductor current, falling inductor current and zero inductor current (which happens in discontinuous conduction operation), where each mode features linear continuous-time dynamics. Such complexities may even lead to chaotic behavior of the DC-DC converters [8].
- Converter topology requires the control input of the converter (i.e., duty cycle) to be bounded between zero and one.
- The inductor current of power converter must be non-negative when it is operating in the discontinuous conduction mode (DCM) [9].
- Stage 1: Identification of the power converter dynamics directly from measured data.
- Stage 2: Design of the voltage regulator based on the identified converter model.
2. Identification Methodology
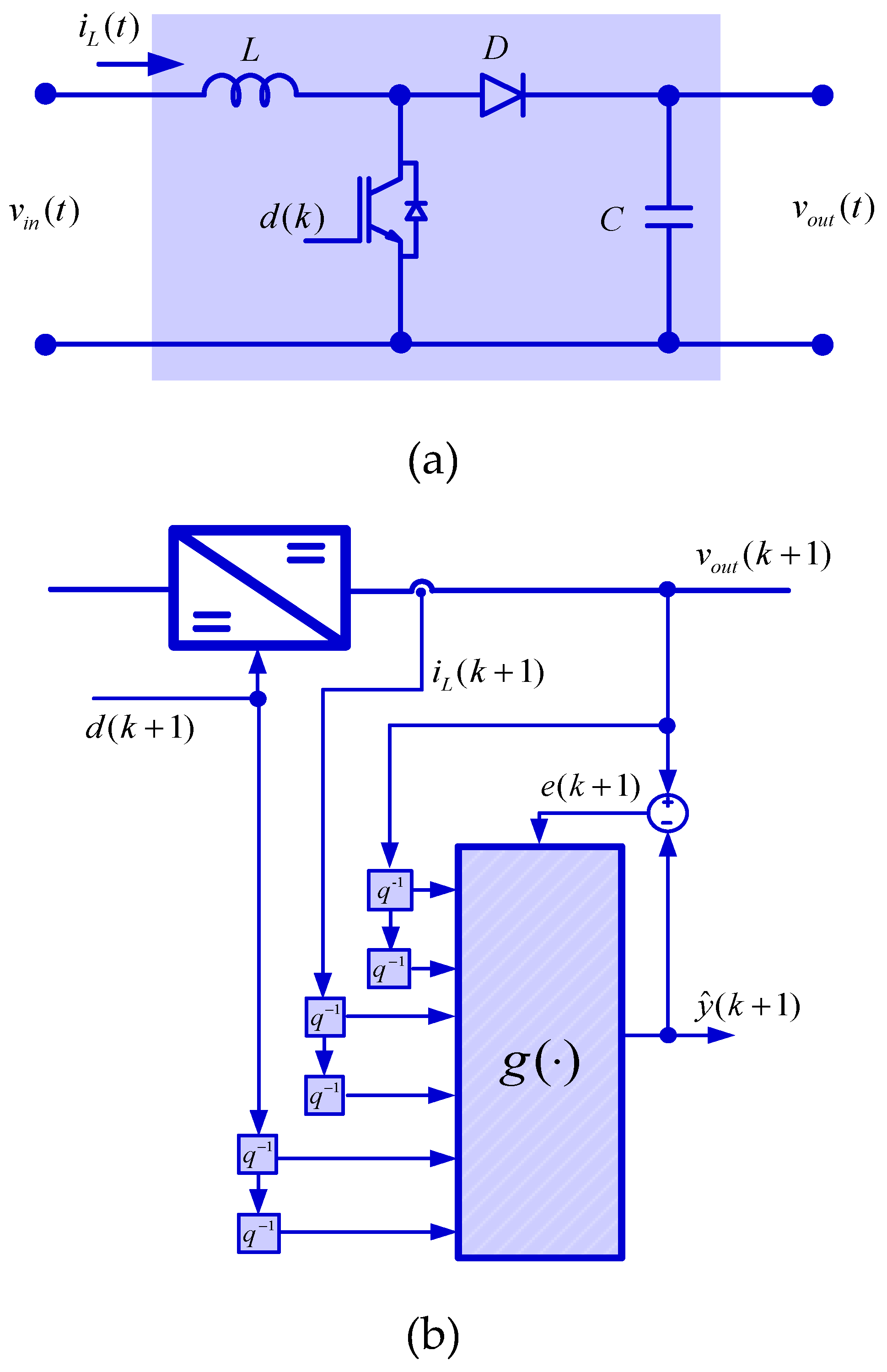
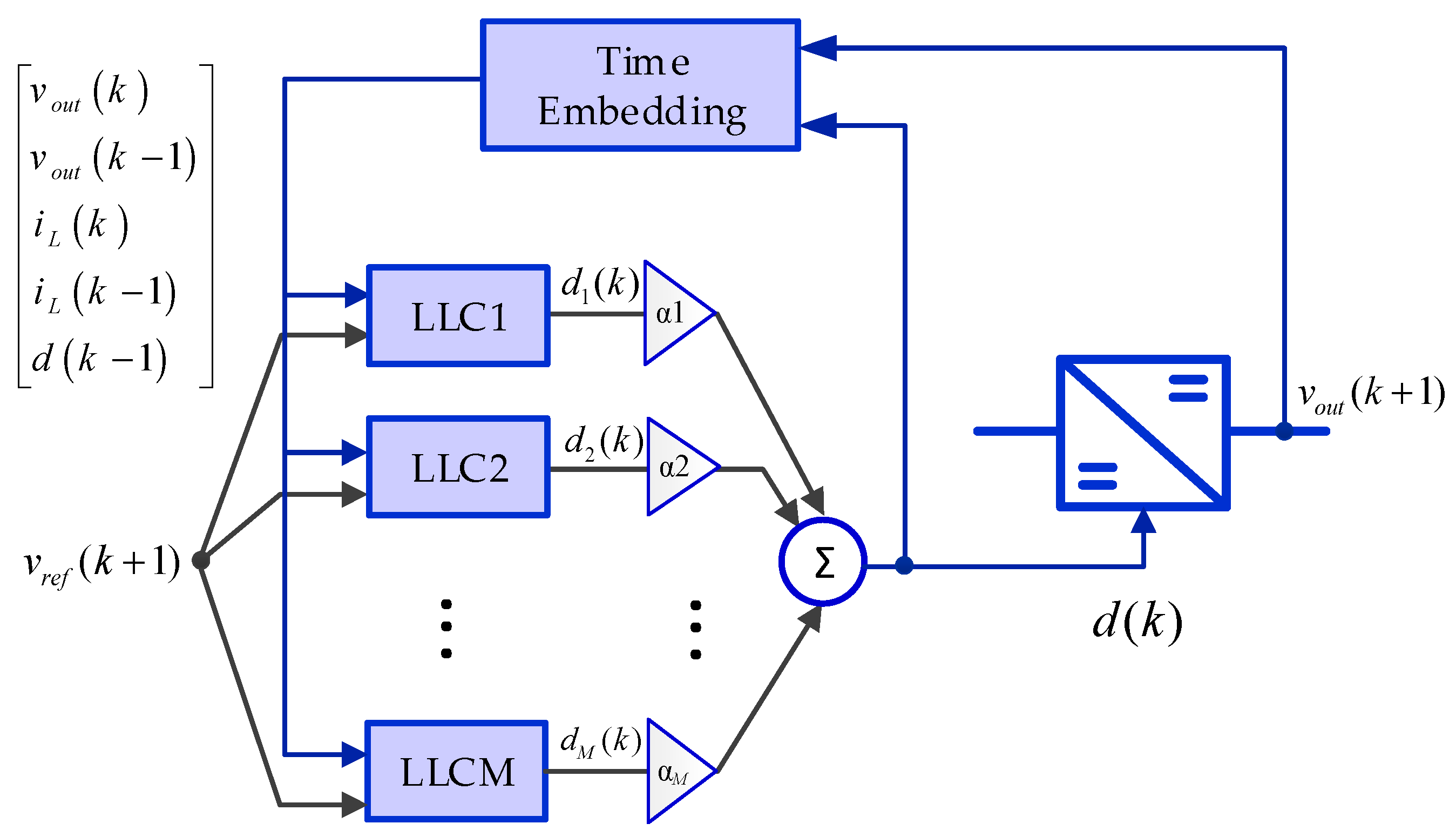
3. Framework
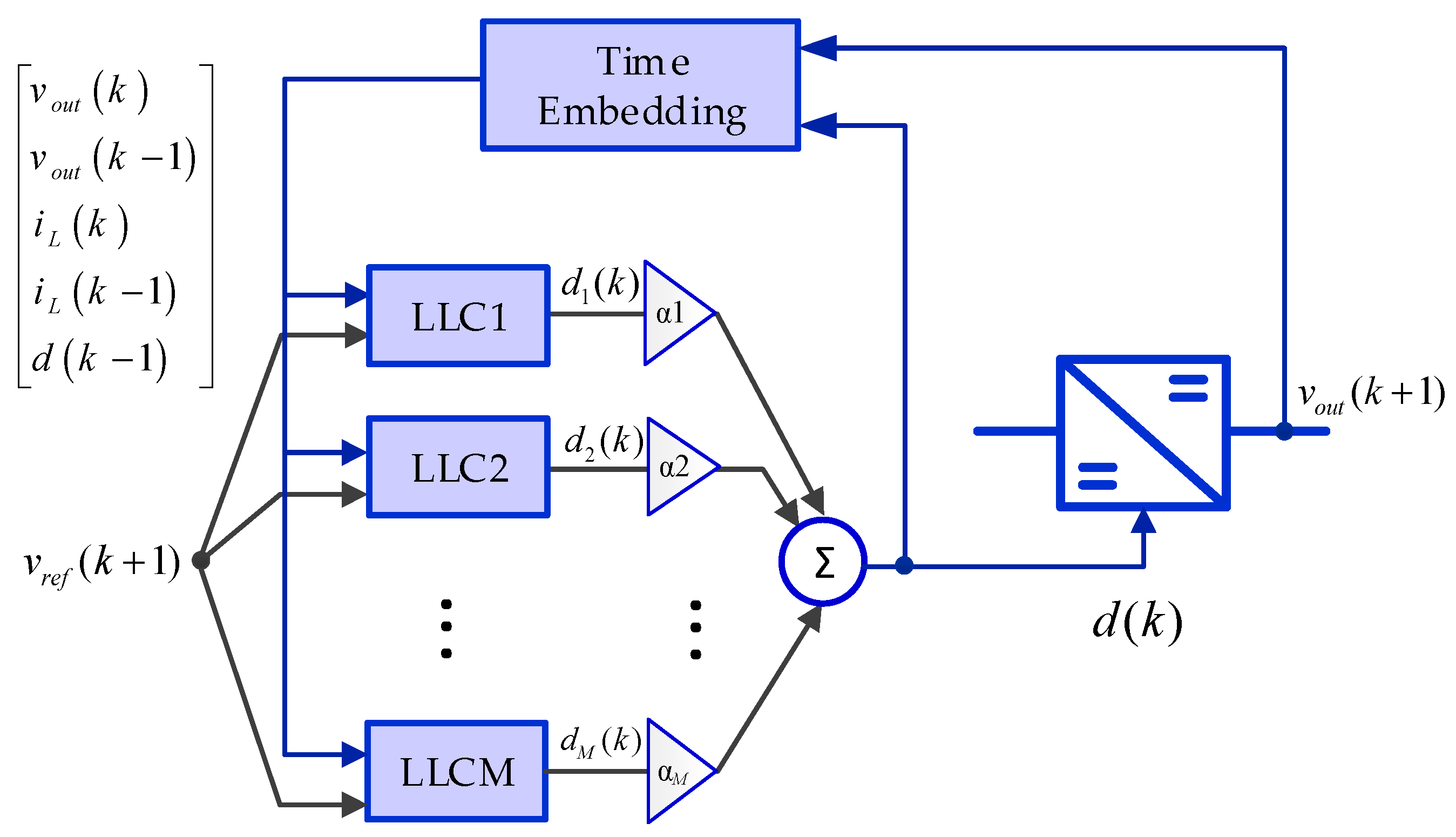
3.1. Network Structure
3.2. Estimation of LLMs’ Parameters
3.3. Learning Algorithm
4. Design of Local Linear Control
5. Simulation Results for a Standalone Boost Converter
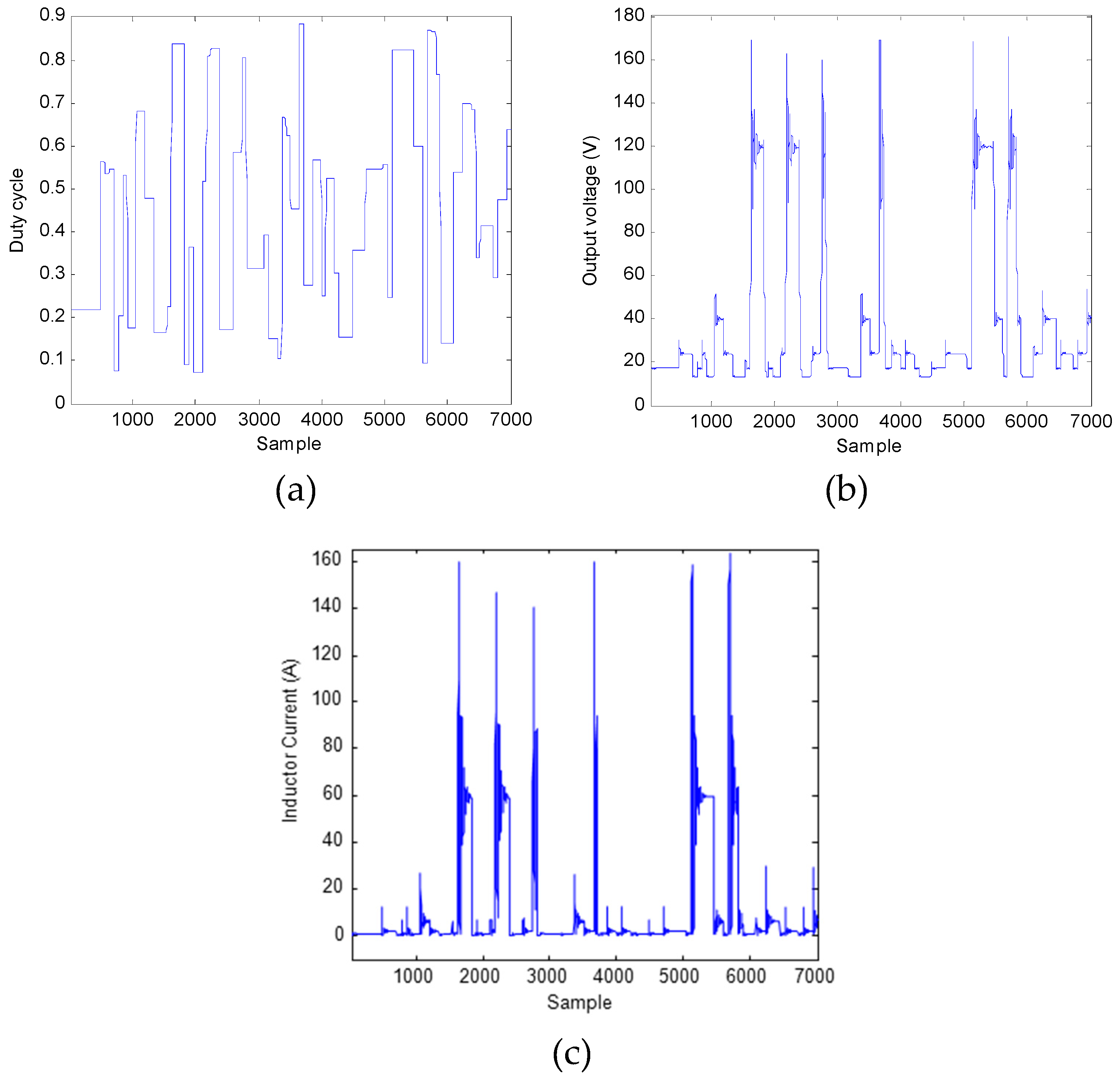
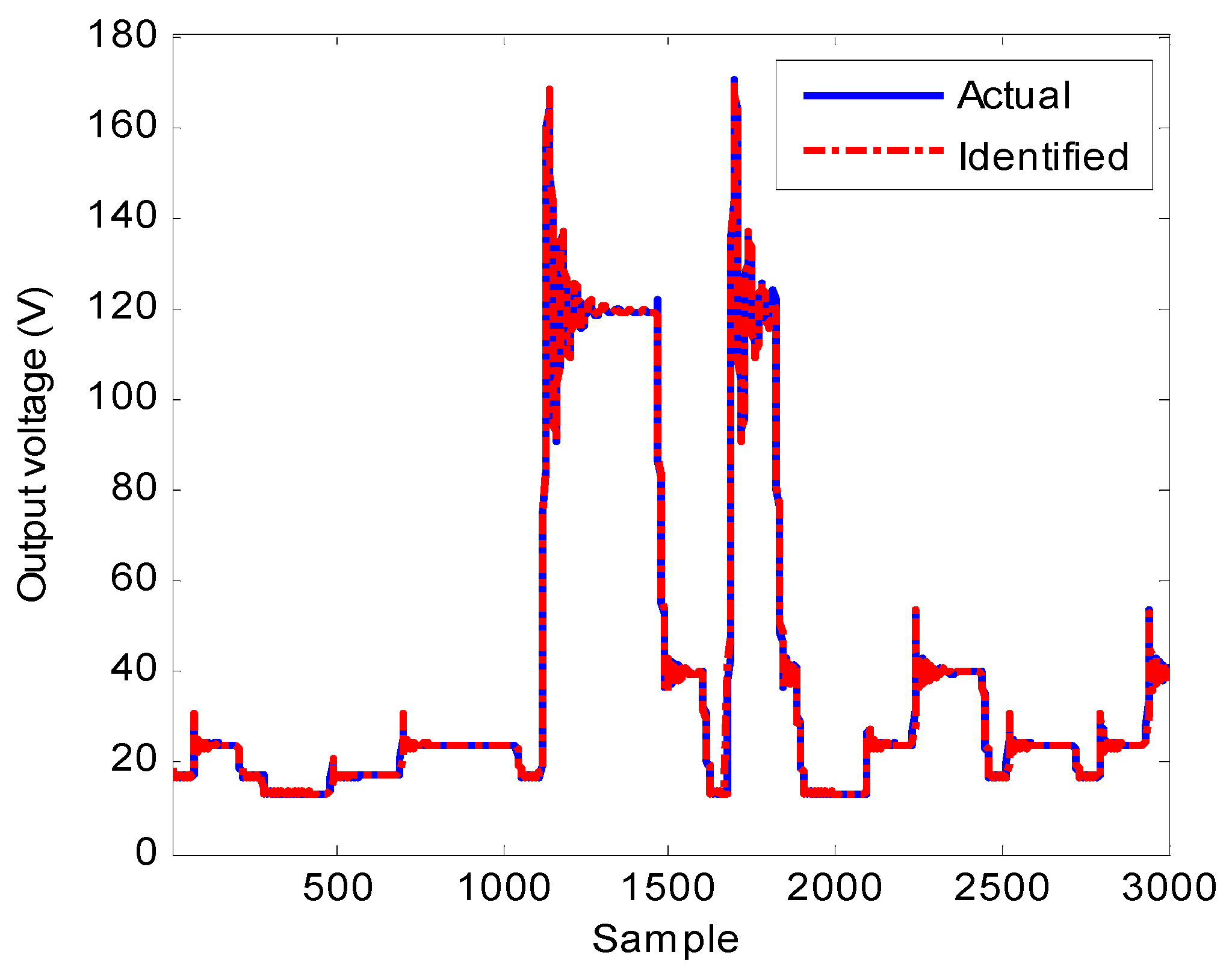
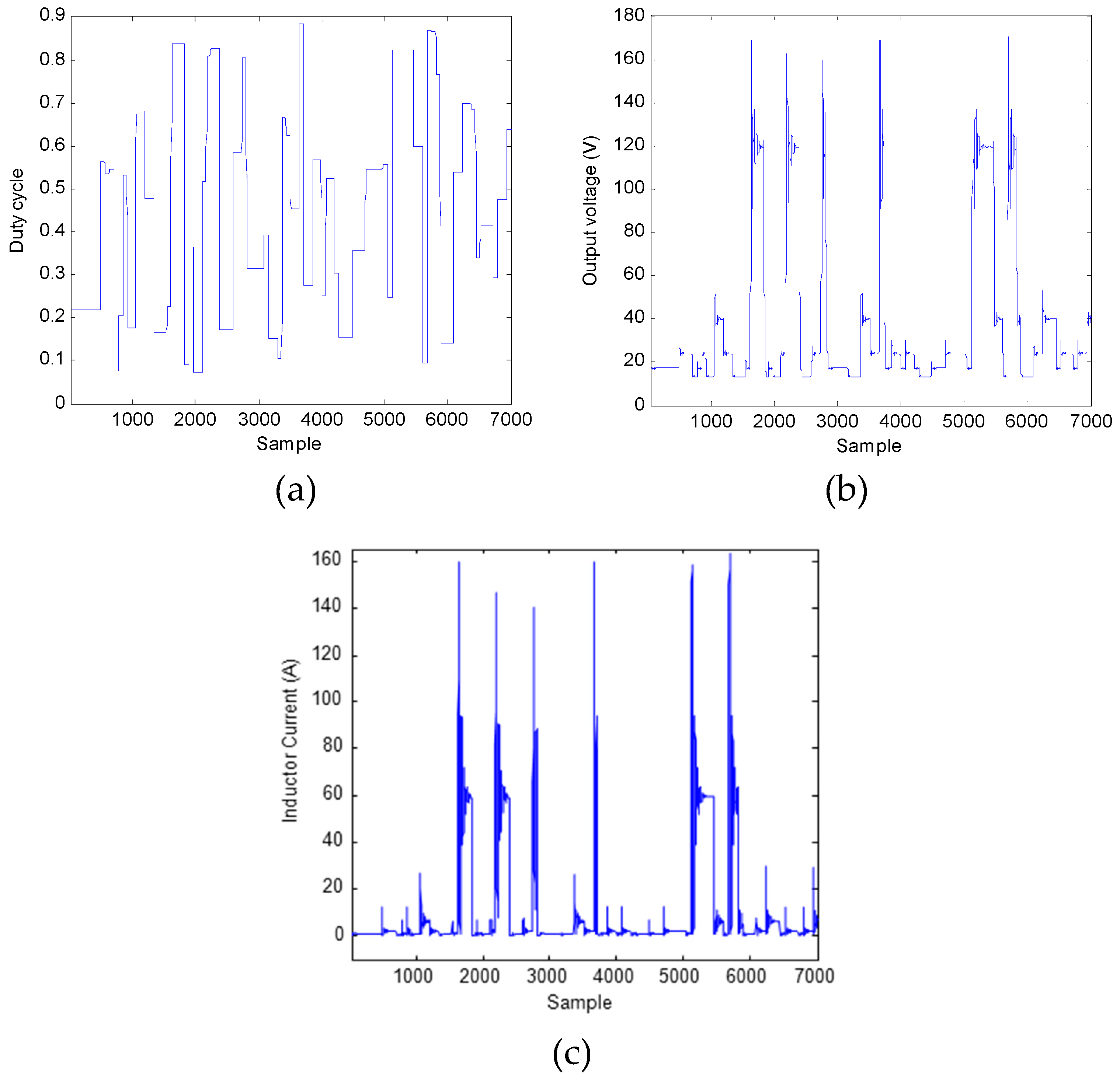
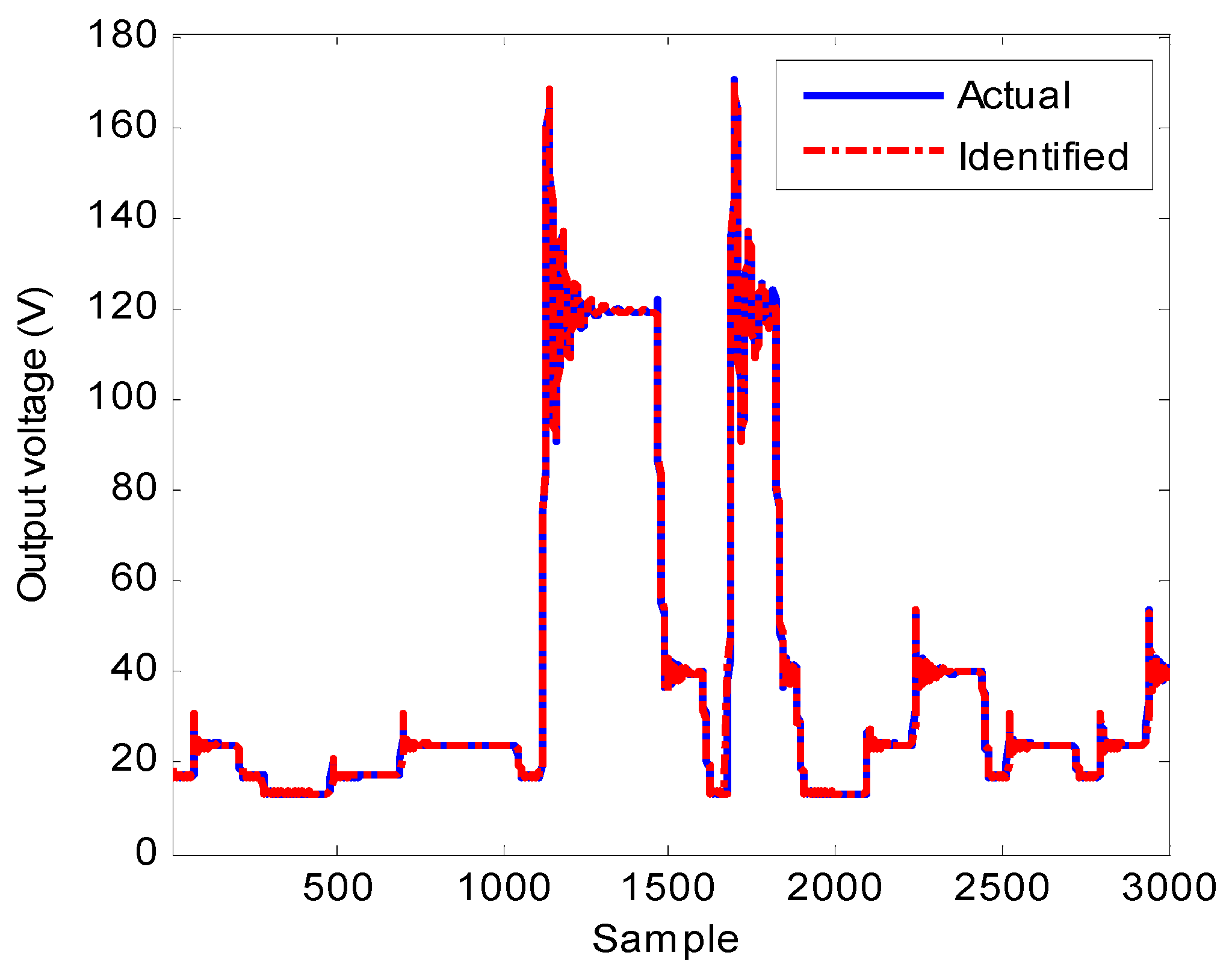
5.1. Results of Converter Identification
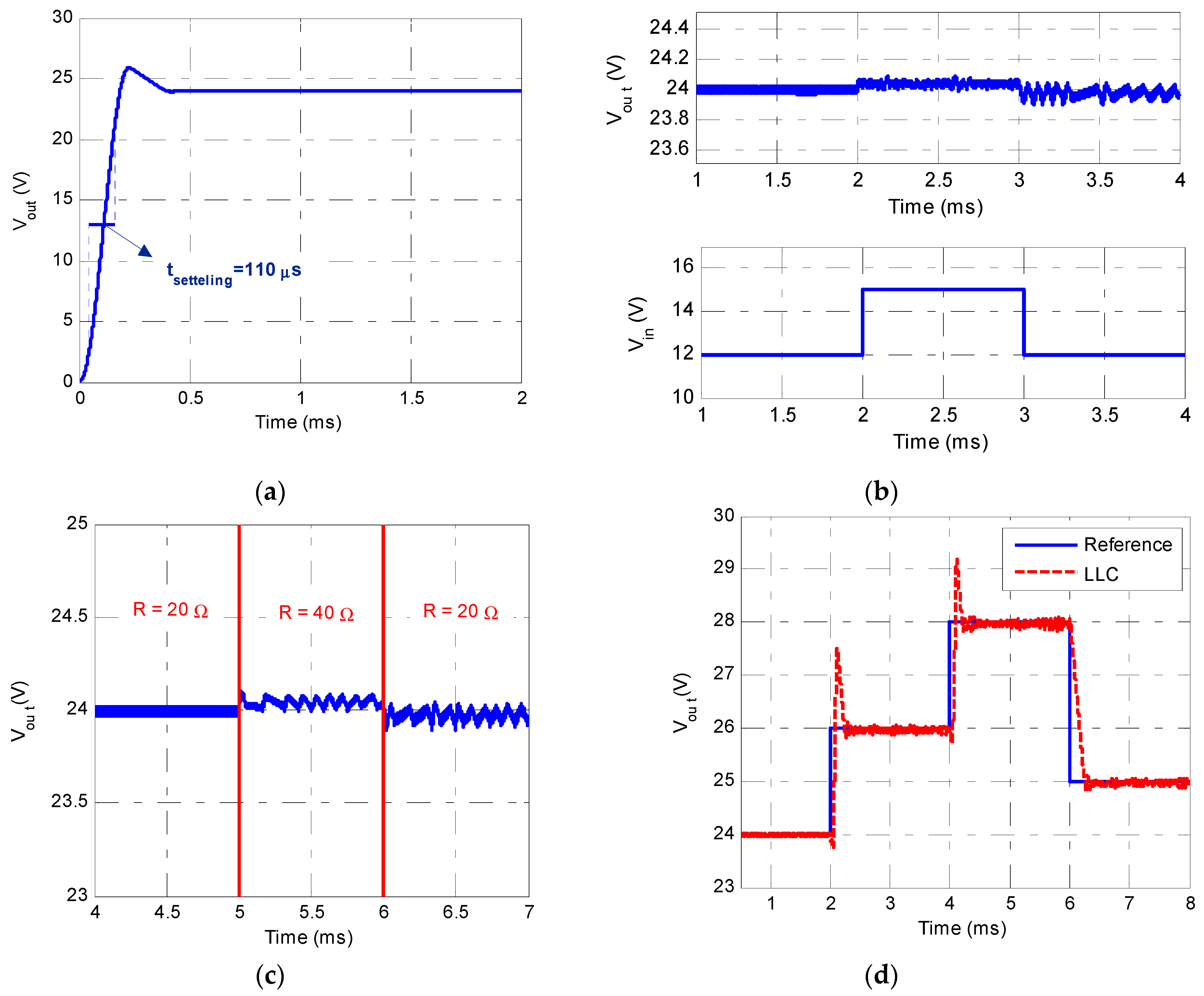
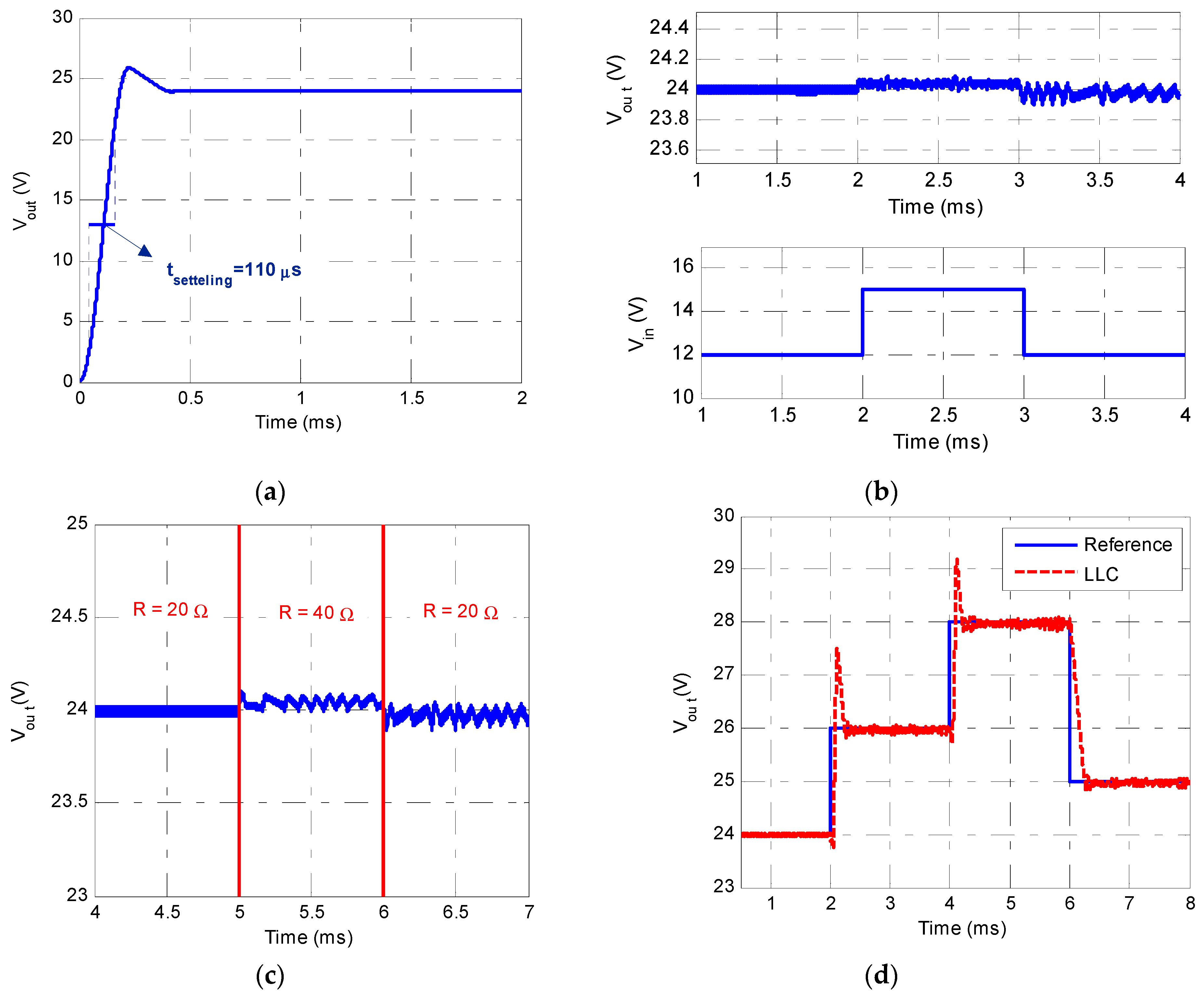
5.2. Voltage Regulation
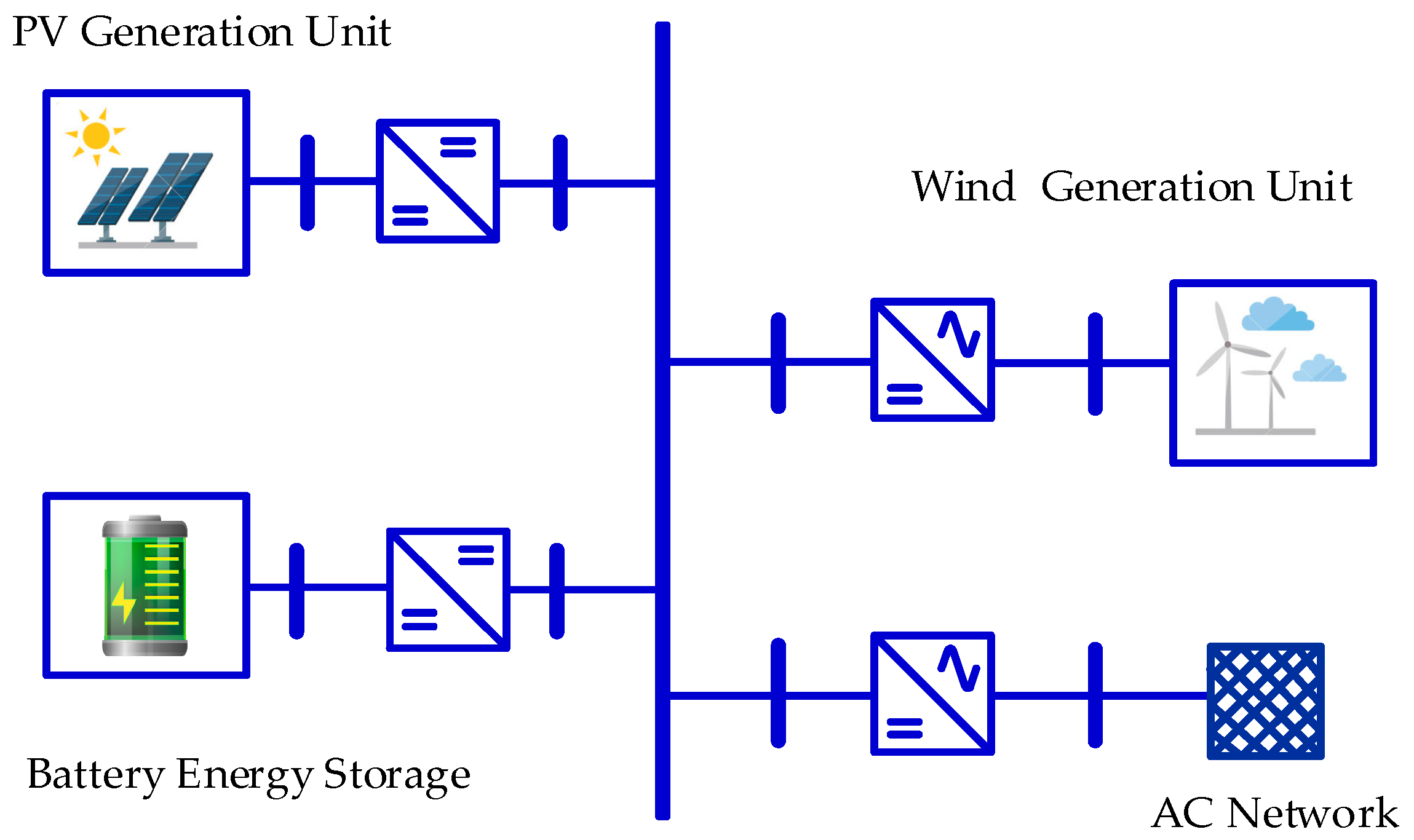
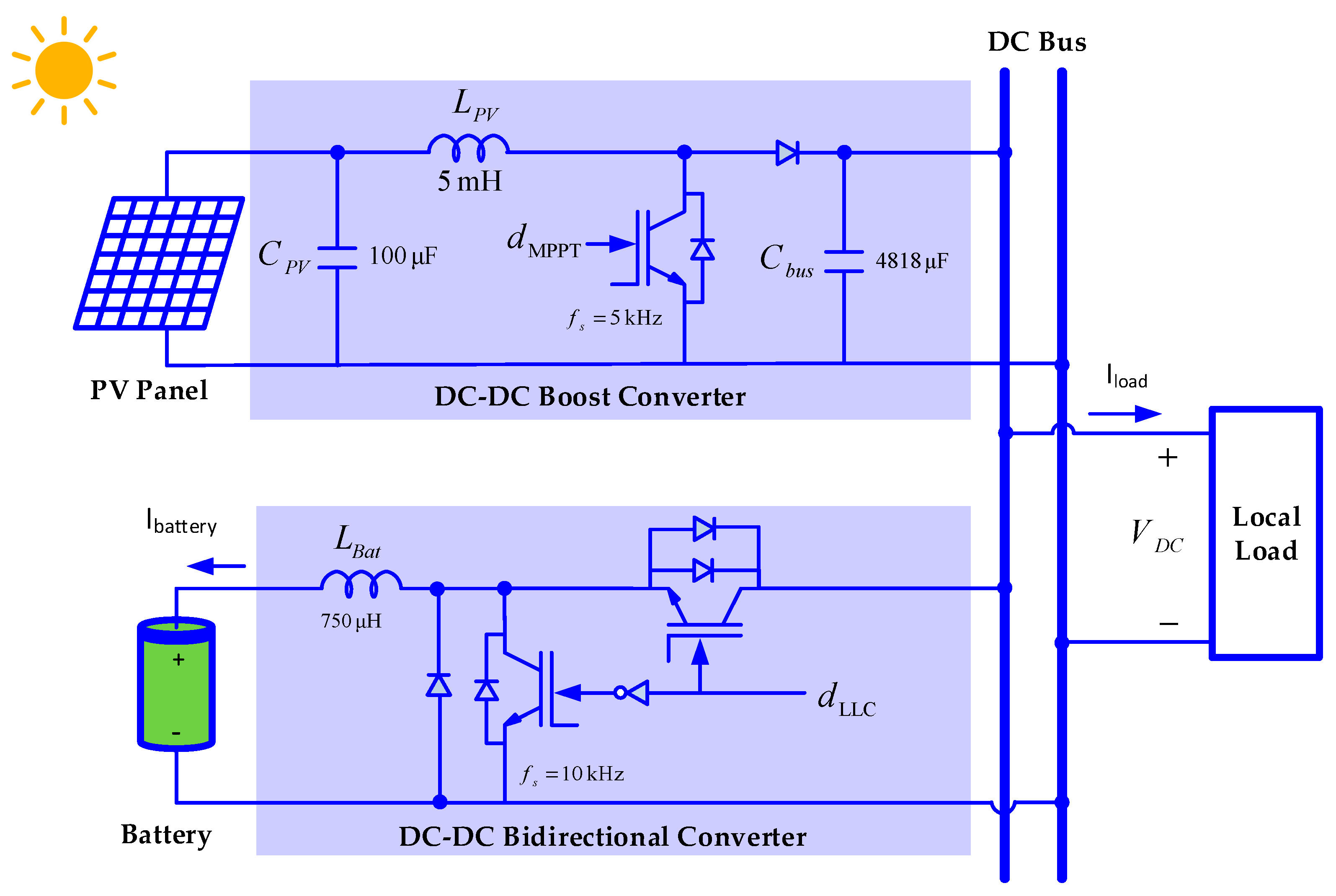
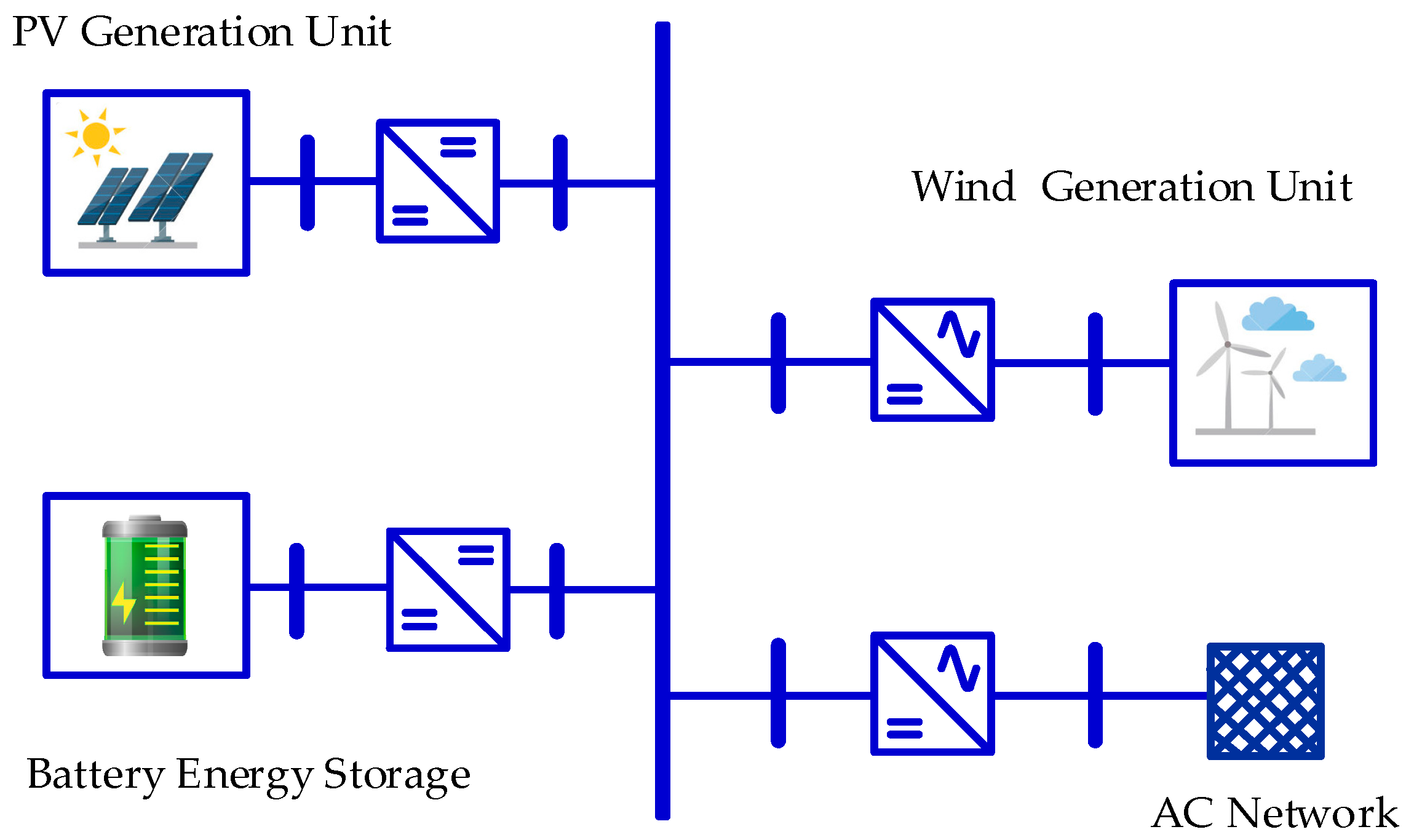
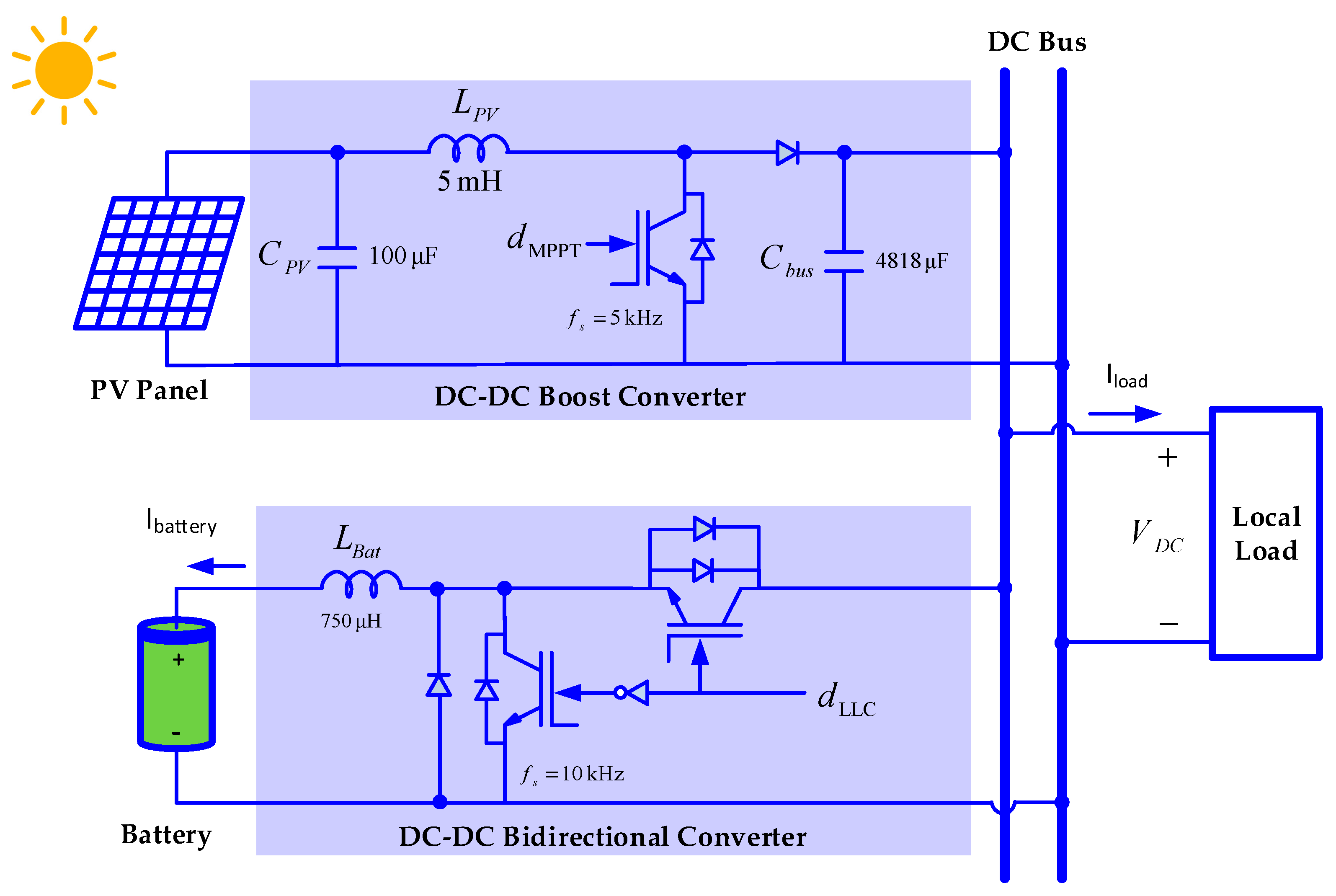
6. Application to a test DC Microgrid
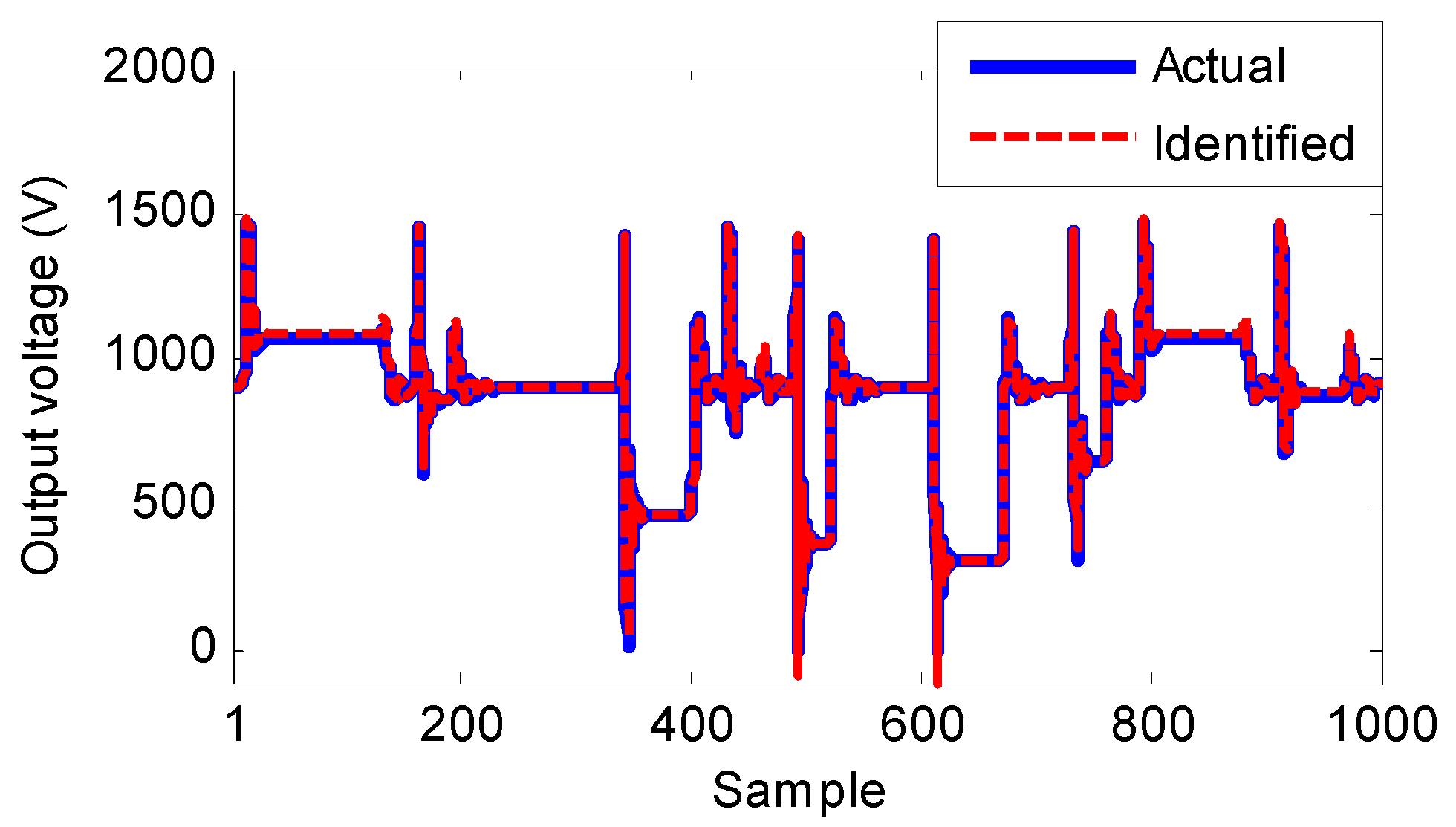
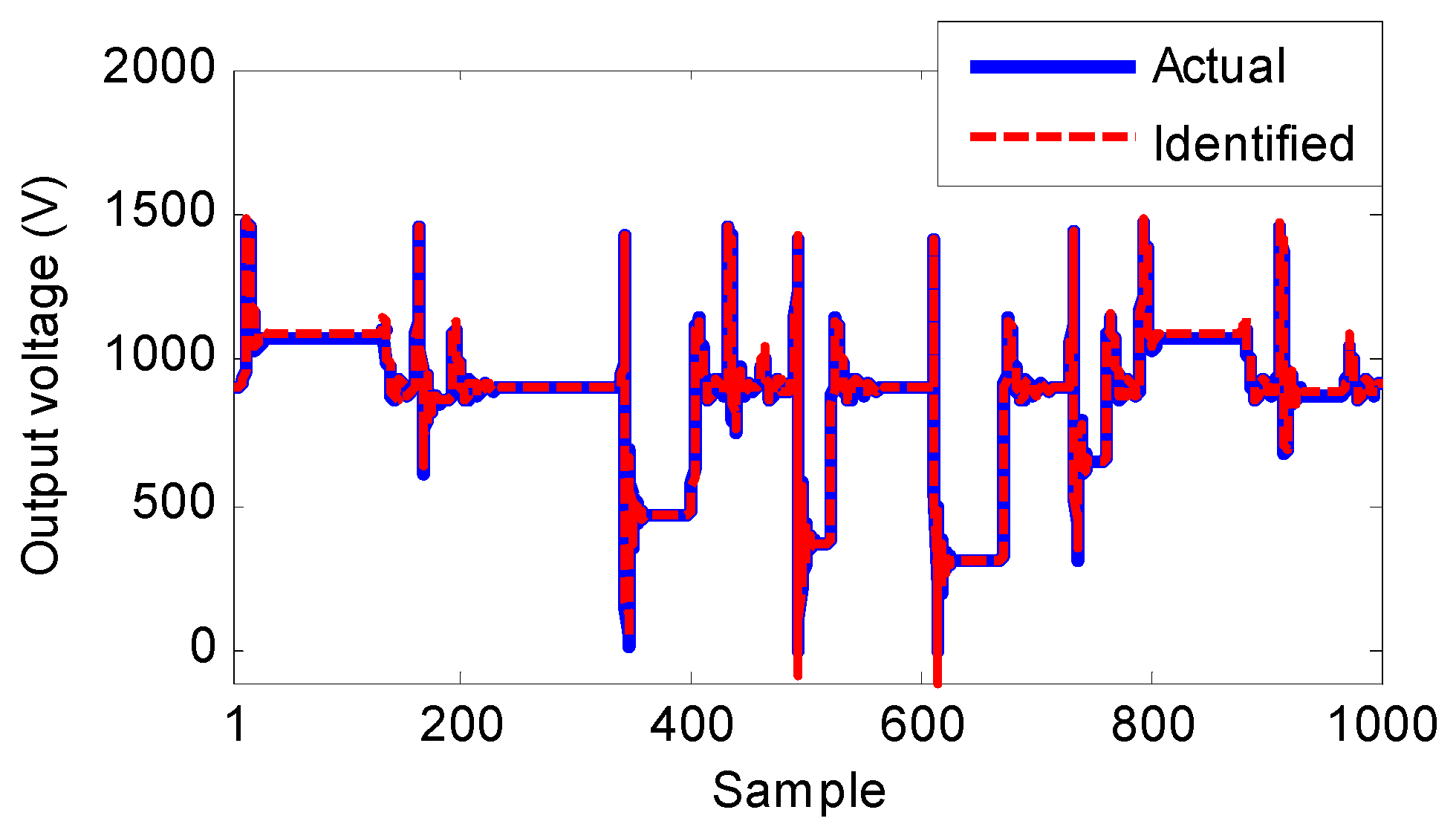
6.1. Identification of Bidirectional Converter Dynamics
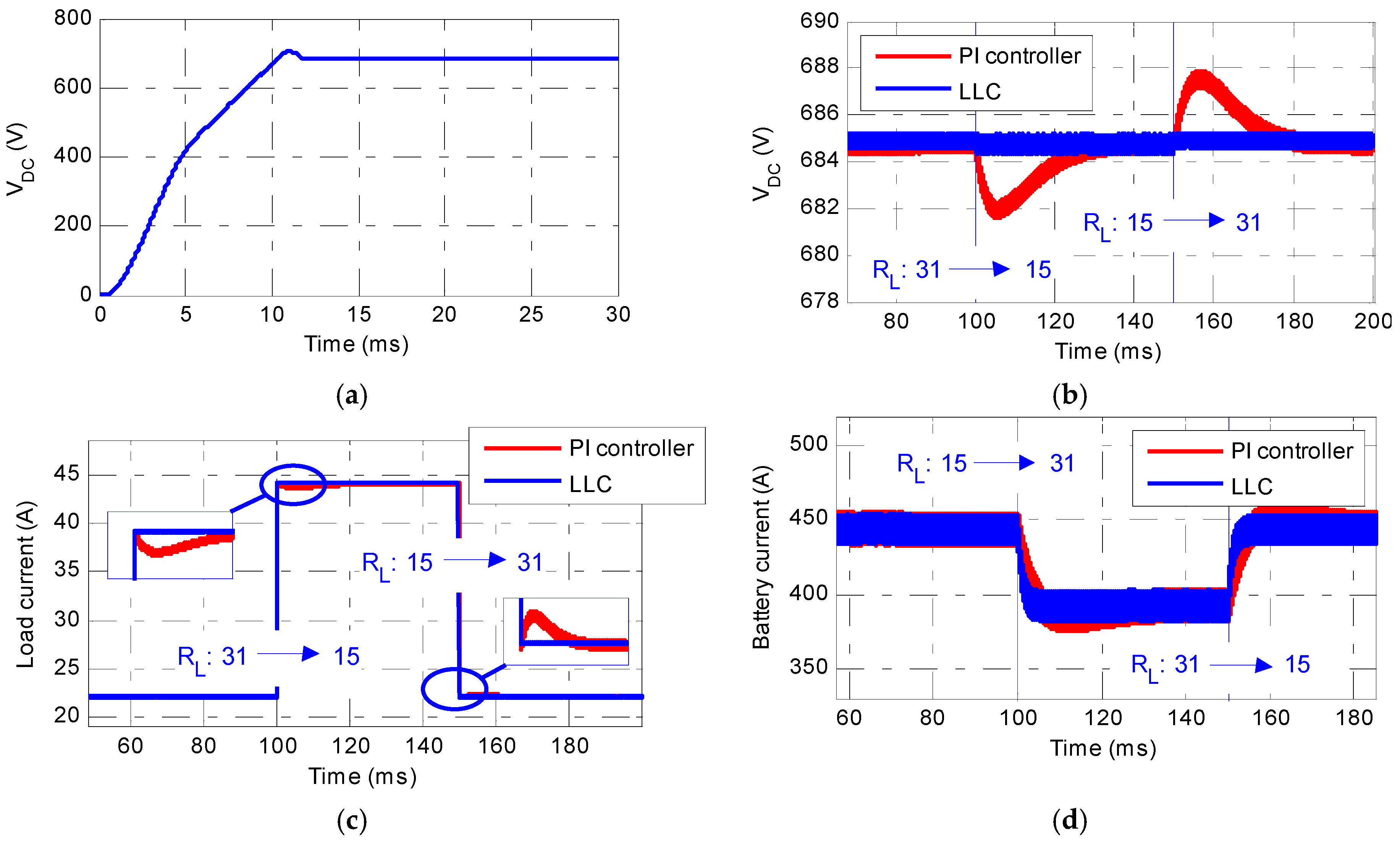
6.2. LLC of the Bidirectional Converter
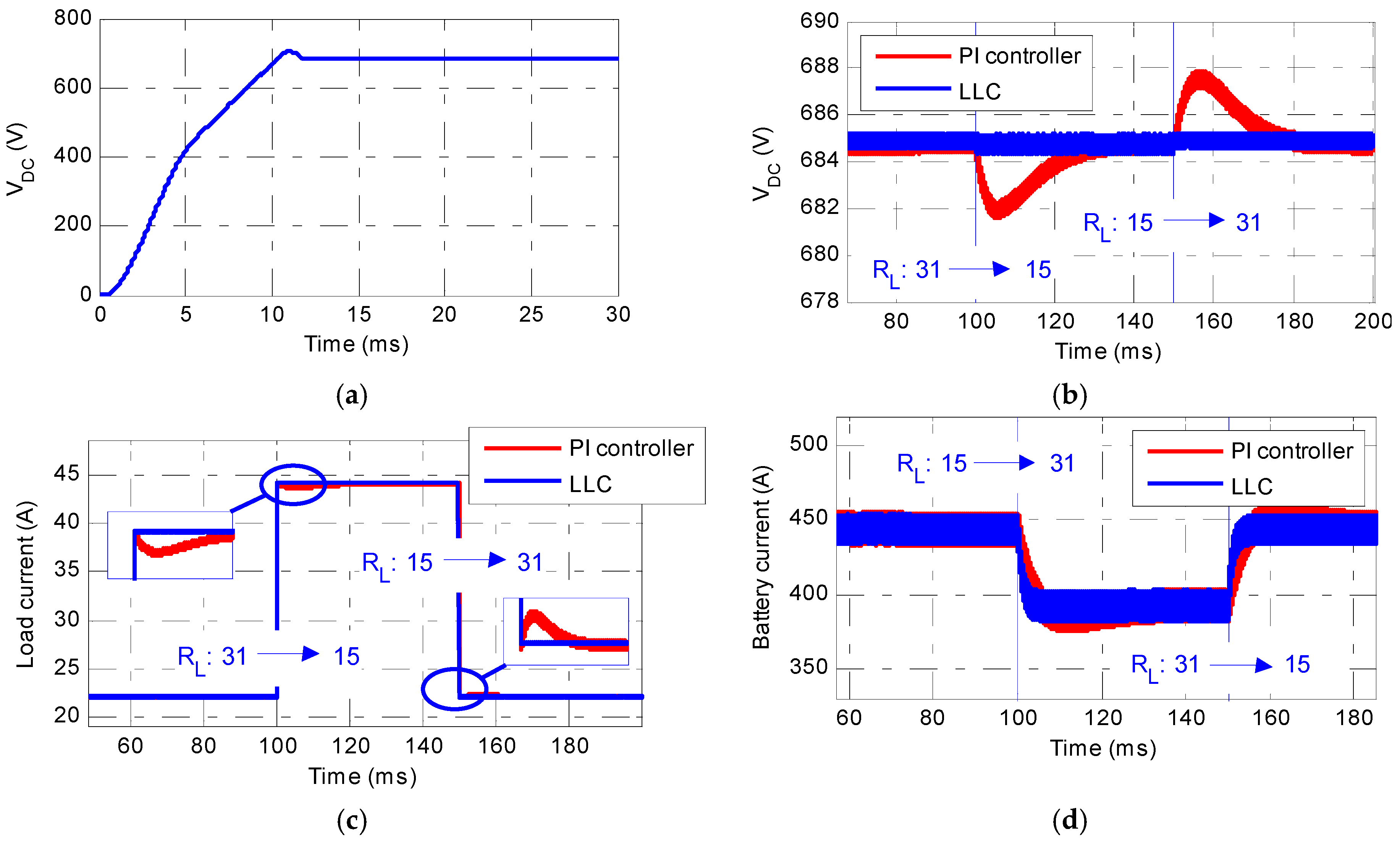
6.2.1. Response to Step Change
6.2.2. Load variations
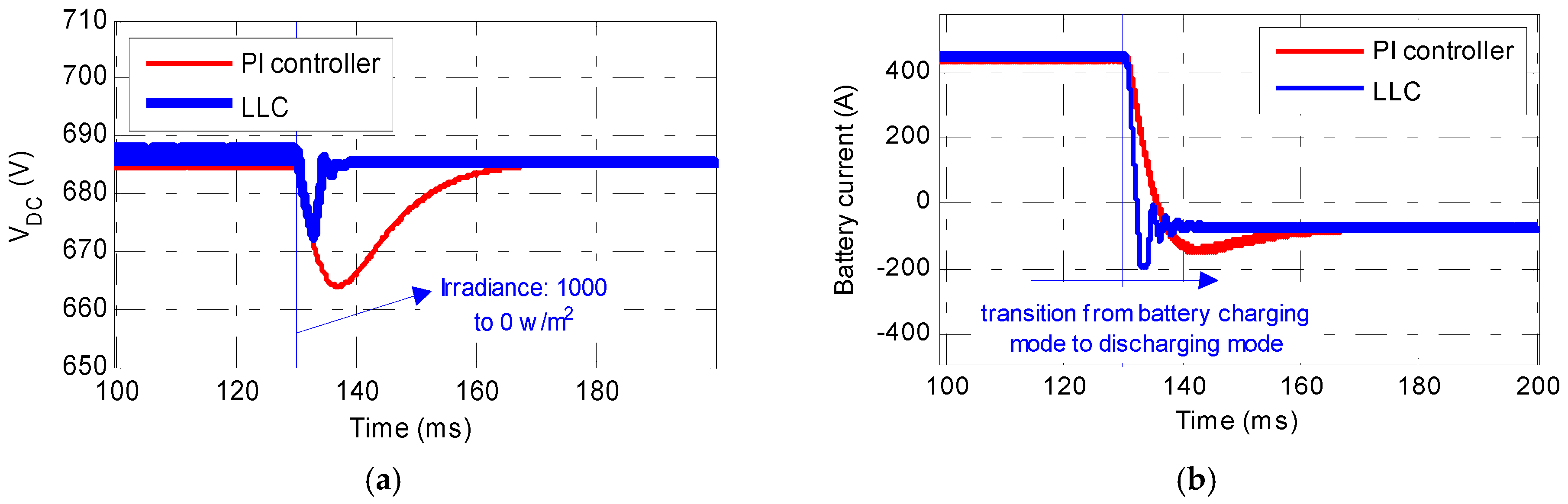
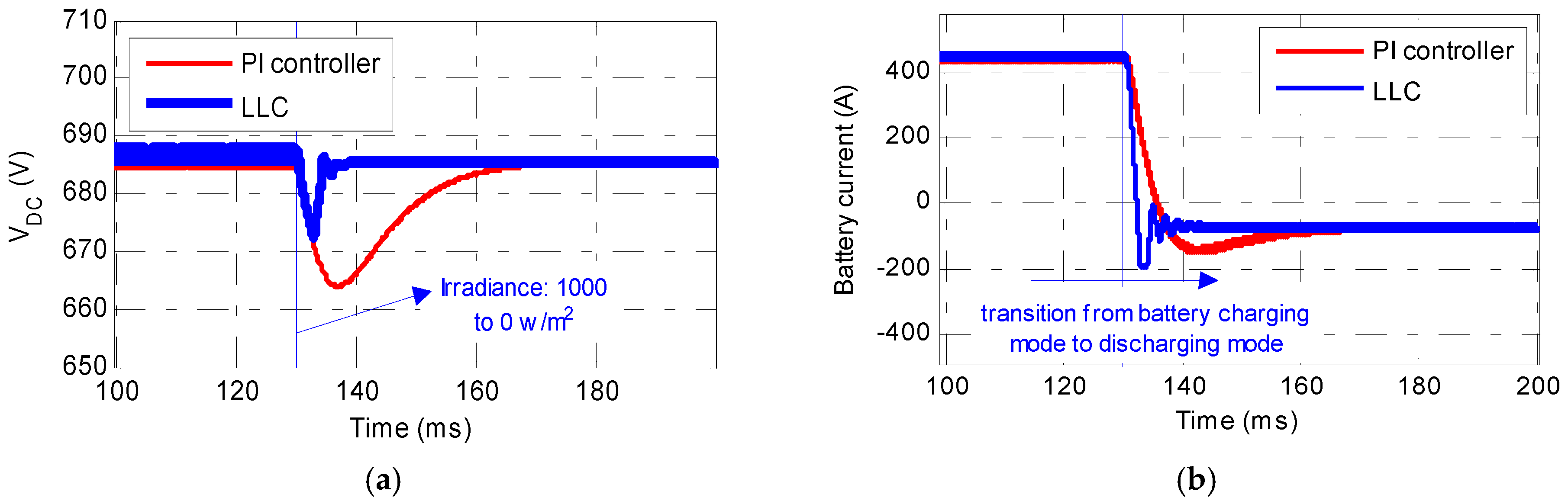
6.2.3. Variations in Solar Irradiance
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rouzbehi, K.; Candela, J.I.; Luna, A.; Gharehpetian, G.B.; Rodriguez, P. Flexible Control of Power Flow in Multiterminal DC Grids using DC–DC Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1135–1144. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Yazdi, S.S.H.; Moghadam, N.S. Power Flow Control in Multi-Terminal HVDC Grids using a Serial-Parallel DC Power Flow Controller. IEEE Access. 2018, 6, 56934–56944. [Google Scholar] [CrossRef]
- Yazdi, S.S.H.; Milimonfared, J.; Fathi, S.H.; Rouzbehi, K. Optimal Placement and Control Variable Setting of Power Flow Controllers in Multi-terminal HVDC Grids for Enhancing Static Security. Int. J. Electr. Power Energy Syst. 2018, 102, 272–286. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Gharehpetian, G.B.; Candela, J.; Luna, A.; Harnefors, L.; Rodriguez, P. Multi-terminal DC grids: Operating analogies to ac power systems. Renew. Sustain. Energy Rev. 2017, 70, 886–895. [Google Scholar] [CrossRef]
- Rodriguez, P.; Rouzbehi, K. Multi-Terminal DC grids: Challenges and Prospects. Mod. Power Syst. Clean Energy 2017, 5, 515–523. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Luna, A.; Rodriguez, P. Towards fully controllable multi-terminal DC grids using flexible DC transmission systems. Energy Convers. Congr. Expo. (ECCE) 2014, 5312–5316. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Candela, J.I.; Luna, A.; Rodriguez, P. A hybrid power flow controller for flexible operation of multi-terminal DC grids. In Proceedings of the International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19−22 October 2014; pp. 550–555. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Candela, J.I.; Luna, A.; Rodriguez, P. Proposals for flexible operation of multi-terminal dc grids: Introducing flexible dc transmission system (FDCTS). In Proceedings of the International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19−22 October 2014; pp. 180–184. [Google Scholar]
- De Medeiros, R.L.P.; Barra, W.; De Bessa, I.V.; Filho, J.E.C.; Ayres, F.A.D.C.; Das Neves, C.C. Robust Decentralized Controller for Minimizing Coupling Effect in Single Inductor Multiple Output DC-DC Converter Operating in Continuous Conduction. Mode. ISA Trans. 2018, 73, 112–129. [Google Scholar] [CrossRef] [PubMed]
- Restrepo, C.; Calvente, J.; Romero, A.; Vidal-Idiarte, E.; Giral, R. Current-Mode Control of A Coupled-Inductor Buck–Boost DC–DC Switching Converter. IEEE Trans. Power Electron. 2012, 27, 2536–2549. [Google Scholar] [CrossRef]
- Shen, L.; Li, C.; Lu, D.D.C. Adaptive Sliding Mode Control Method for DC–DC Converters. IET Power Electron. 2015, 8, 1723–1732. [Google Scholar] [CrossRef]
- Elshaer, M.; Mohamed, A.; Mohammed, O. Smart Optimal Control of DC-DC Boost Converter in PV Systems. In Proceedings of the Transmission and Distribution Conference and Exposition, Sao Paulo, Brazil, 8–10 November 2010. [Google Scholar]
- Cheng, K.H.; Hsu, C.F.; Lin, C.M.; Lee, T.T.; Li, C. Fuzzy–Neural Sliding-Mode Control for DC-DC Converters Using Asymmetric Gaussian Membership Functions. IEEE Trans. Ind. Electron. 2007, 54, 1528–1536. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Citro, C.; Luna, A.; Rodriguez, P. Enhanced Average Current-Mode Control for DC-DC Converters Based on An Optimized Fuzzy Logic Controller. In Proceedings of the IECON 2012—38th Annual Conference of IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 382–387. [Google Scholar]
- Bastos, R.F.; Aguiar, C.R.; Gonçalves, A.F.Q.; Machado, R.Q. An Intelligent Control System Used to Improve Energy Production From Alternative Sources With DC/DC Integration. IEEE Trans. Smart Grid. 2014, 5, 2486–2495. [Google Scholar] [CrossRef]
- Naik, B.; Mehta, A. Sliding mode controller with modified sliding function for DC-DC Buck Converter. ISA Trans. 2017, 70, 279–287. [Google Scholar] [CrossRef]
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models; Springer-Verlag: Berlin, Germany, 2001. [Google Scholar]
- Hametner, C.; Jakubek, S. Nonlinear Identification with Local Model Networks using GTLS Techniques and Equality Constraints. IEEE Trans. Neural Networks 2011, 22, 1406–1418. [Google Scholar] [CrossRef] [PubMed]
- Kazemi, R.; Abdollahzade, M. Introducing an Evolving Local Neuro-Fuzzy Model—Application to modeling of car-following behavior. ISA Trans. 2015, 59, 375–384. [Google Scholar] [CrossRef] [PubMed]
- Oysal, Y.; Yilmaz, S. Fuzzy Wavelet Neural Network Models for Prediction and Identification of Dynamical Systems. IEEE Trans. Neural Networks. 2010, 21, 1599–1609. [Google Scholar]
- Takagi, T.; Sugeno, M. Fuzzy Identification of Systems and Its Applications to Modeling and Control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Miranian, A.; Abdollahzade, M. Developing a Local LSSVM-Based Neuro-Fuzzy Model for Nonlinear and Chaotic Time Series Prediction. IEEE Trans. Neural Netw. 2013, 24, 207–218. [Google Scholar] [CrossRef]
- Miranian, A.; Rouzbehi, K. Nonlinear Power System Load Identification Using Local Model Networks. IEEE Trans. Power Syst. 2013, 28, 2872–2881. [Google Scholar] [CrossRef]
- Narendra, K.; Lin, Y.-H.; Valavani, L. Stable Adaptive Controller Design, Part II: Proof of Stability. IEEE Trans. Autom. 1980, 25, 440–448. [Google Scholar] [CrossRef]
- Alonge, F.; Rabbeni, R.; Pucci, M.; Vitale, G. Identification and Robust Control of a Quadratic DC/DC Boost Converter by Hammerstein Model. IEEE Trans. Ind. Appl. 2015, 51, 3975–3985. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.; Palmer, P.; Capel, A. Application of Centered Differentiation and Steepest Descent to Maximum Power Point Tracking. IEEE Trans. Ind. Electron. 2007, 54, 2539–2549. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Study | RMSE (Volt) | MAPE (Percent) |
|---|---|---|
| Clean data | 0.5504 | 1.0553 |
| Noise contaminated | 0.5806 | 1.0905 |
| Controller | Criterion | ||
|---|---|---|---|
| Rise Time | Settling Time | Overshoot | |
| PI | 340 μs | 850 μs | 12% |
| LLC | 110 μs | 350 μs | 6.2% |
| Parameters Variation | ITAE |
|---|---|
| −10% | 3.12 × 10−7 |
| −5% | 3.31 × 10−7 |
| Base case | 3.51 × 10−7 |
| 5% | 5.17 × 10−7 |
| 10% | 7.66 × 10−7 |
| Device | Specification |
|---|---|
| PV panel converter with MPPT | 20 kW |
| Bidirectional converter | 20 kW |
| Battery | 500 Ah |
| Load | 15 kW |
| Controller | Criterion | ||
|---|---|---|---|
| Rise Time (ms) | Settling Time (ms) | Overshoot (%) | |
| PI | 14.15 | 35.66 | 6.12 |
| LLC | 7.01 | 11.10 | 2.62 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rouzbehi, K.; Miranian, A.; Escaño, J.M.; Rakhshani, E.; Shariati, N.; Pouresmaeil, E. A Data-Driven Based Voltage Control Strategy for DC-DC Converters: Application to DC Microgrid. Electronics 2019, 8, 493. https://doi.org/10.3390/electronics8050493
Rouzbehi K, Miranian A, Escaño JM, Rakhshani E, Shariati N, Pouresmaeil E. A Data-Driven Based Voltage Control Strategy for DC-DC Converters: Application to DC Microgrid. Electronics. 2019; 8(5):493. https://doi.org/10.3390/electronics8050493
Chicago/Turabian StyleRouzbehi, Kumars, Arash Miranian, Juan Manuel Escaño, Elyas Rakhshani, Negin Shariati, and Edris Pouresmaeil. 2019. "A Data-Driven Based Voltage Control Strategy for DC-DC Converters: Application to DC Microgrid" Electronics 8, no. 5: 493. https://doi.org/10.3390/electronics8050493
APA StyleRouzbehi, K., Miranian, A., Escaño, J. M., Rakhshani, E., Shariati, N., & Pouresmaeil, E. (2019). A Data-Driven Based Voltage Control Strategy for DC-DC Converters: Application to DC Microgrid. Electronics, 8(5), 493. https://doi.org/10.3390/electronics8050493