Cyber-Physical System Framework for Measurement and Analysis of Physical Activities




Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Background
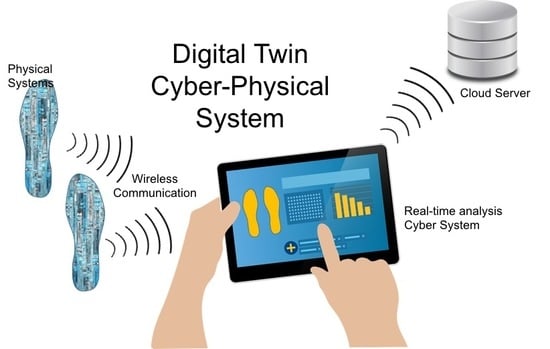
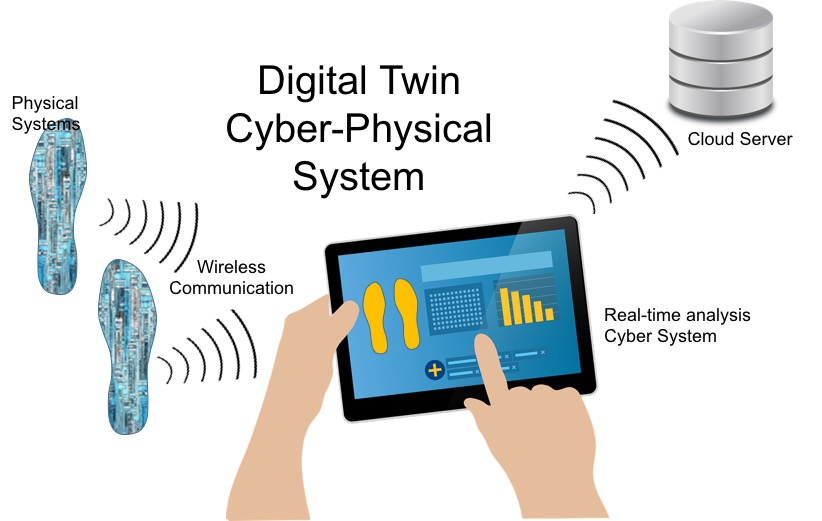
3. A CPS Framework for Physical Activity Monitoring
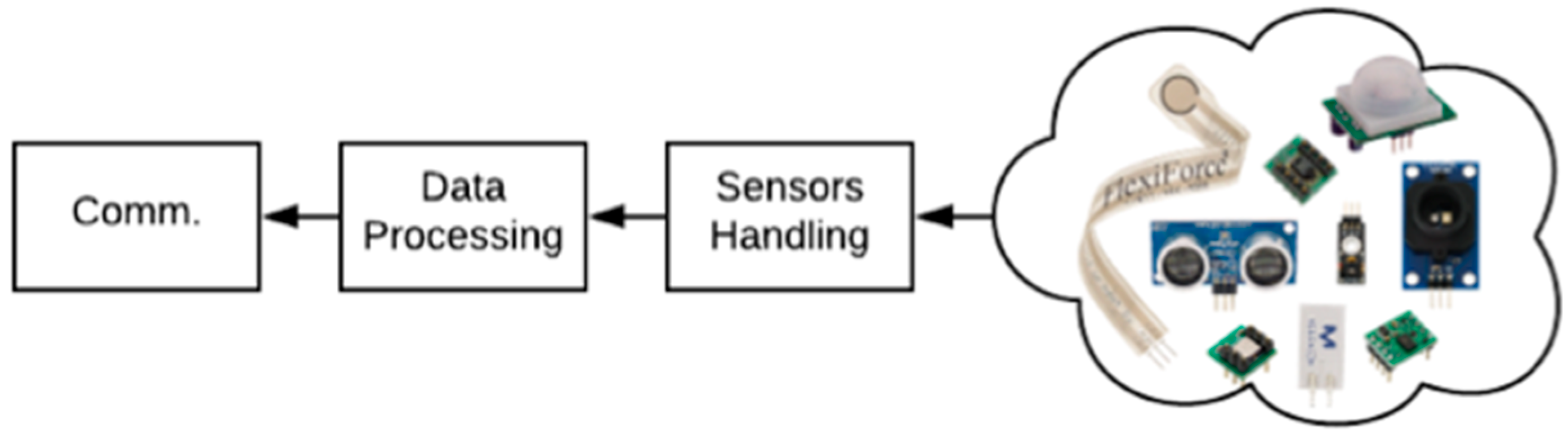
3.1. Physical System—A Sensor Network as a Single Measurement Device
3.1.1. Sensors Handling Module
3.1.2. Data Processing Module
3.1.3. Physical System Communication (PSC) Module
3.2. Cyber System
3.2.1. Cyber System Communication (CSC) Module
3.2.2. Data Processing Module
- Shoe/foot side detection: The circuit and sensor placement for the designed hardware (SmartInsole) is identical for all sizes (i.e., the same circuit can be used for the right foot and the left foot). However, the data processing module in the Cyber System is able to identify which foot it is getting data from by performing simple verification using the accelerometers’ Z-axis data where negative and positive values at startup indicate which foot this SmartInsole is used on.
- Number of steps: Estimating the number of steps is performed by each foot individually, and adding the right and left foot’s steps result on the overall steps performed by the user. This information is calculated by many fitness trackers and smartphone apps, such as FitBit, using intelligent algorithms and embedded accelerometers. However, step count using the SmartInsole is difficult to cheat since a step is only counted if the user performs an actual step on the insole. In our system, the average pressure is measured and continuously updated to control a threshold. A step is detected each time the real-time average pressure exceeds the dynamic threshold. The threshold value is updated continuously throughout the user activity to account for the user’s changing pace. The step count for each insole is calculated as follows:where S(x) is the number of steps for insole x, A(x) is the real-time average FSR values for insole x, and α is the dynamic threshold.
- Cadence: Cadence is defined as the number of steps performed per minute. It is an important statistic in gait analysis for healthcare and for sports analysis. By extracting the timestamps for heel-strike (HS) and toe-off (TO), we can accurately calculate the number of steps and the duration between each step. Using this information, we calculate cadence as the number of steps occurring per minute.
3.2.3. Physical Systems Profiler
3.2.4. Visualization Module
3.2.5. DBMS
3.3. Communication and Composition of CPS Components
4. Evaluation Case Study
4.1. Design
4.2. Implementation
4.3. Experiment
- 30-m forward walk.
- 30-m backward walk.
- 30-m forward jog.
- 30-m backward jog.
- 50-m sprint.
- 30-s jumping.
- Kicking a soccer ball.
4.4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- El Saddik, A. Digital Twins: The Convergence of Multimedia Technologies. IEEE Multimed. 2018, 25, 87–92. [Google Scholar] [CrossRef]
- Alam, K.M.; El Saddik, A. C2PS: A Digital Twin Architecture Reference Model for the Cloud-Based Cyber-Physical Systems. IEEE Access 2017, 5, 2050–2062. [Google Scholar] [CrossRef]
- Soegijoko, S. A brief review on existing cyber-physical systems for healthcare applications and their prospective national developments. In Proceedings of the 2013 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 7–8 November 2013; p. 2. [Google Scholar]
- Avrunin, G.S.; Clarke, L.A.; Osterweil, L.J.; Goldman, J.M.; Rausch, T. Smart checklists for human-intensive medical systems. In Proceedings of the IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN 2012), Boston, MA, USA, 25–28 June 2012. [Google Scholar] [CrossRef]
- Haque, S.A.; Aziz, S.M. False Alarm Detection in Cyber-physical Systems for Healthcare Applications. AASRI Procedia 2013, 5, 54–61. [Google Scholar] [CrossRef]
- Lee, I.; Sokolsky, O.; Chen, S.; Hatcliff, J.; Jee, E.; Kim, B.; King, A.; Mullen-Fortino, M.; Park, S.; Roederer, A.; et al. Challenges and Research Directions in Medical Cyber-Physical Systems. Proc. IEEE 2012, 100, 75–90. [Google Scholar] [CrossRef]
- Postolache, O.A.; Postolache, G.B. Development and selection of balance sensing devices. IEEE Instrum. Meas. Mag. 2017, 20, 38–48. [Google Scholar] [CrossRef]
- De Venuto, D.; Annese, V.F.; Ruta, M.; Di Sciascio, E.; Sangiovanni Vincentelli, A.L. Designing a Cyber-Physical System for Fall Prevention by Cortico–Muscular Coupling Detection. IEEE Des. Test 2016, 33, 66–76. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiu, M.; Tsai, C.; Hassan, M.M.; Alamri, A. Health-CPS: Healthcare Cyber-Physical System Assisted by Cloud and Big Data. IEEE Syst. J. 2017, 11, 88–95. [Google Scholar] [CrossRef]
- Alamri, A.; Cha, J.; El Saddik, A. AR-REHAB: An Augmented Reality Framework for Poststroke-Patient Rehabilitation. IEEE Trans. Instrum. Meas. 2010, 59, 2554–2563. [Google Scholar] [CrossRef]
- Grispos, G.; Glisson, W.B.; Choo, K.-K.R. Medical Cyber-Physical Systems Development: A Forensics-Driven Approach. In Proceedings of the 2017 IEEE/ACM International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Philadelphia, PA, USA, 17–19 July 2017; pp. 108–113. [Google Scholar] [CrossRef]
- Leitão, P.; Colombo, A.W.; Karnouskos, S. Industrial automation based on cyber-physical systems technologies: Prototype implementations and challenges. Comput. Ind. 2016, 81, 11–25. [Google Scholar] [CrossRef]
- Abid, H.; Phuong, L.T.T.; Wang, J.; Lee, S.; Qaisar, S. V-Cloud: Vehicular Cyber-Physical Systems and Cloud Computing. In Proceedings of the 4th International Symposium on Applied Sciences in Biomedical and Communication Technologies, Barcelona, Spain, 26–29 October 2011. [Google Scholar] [CrossRef]
- Xiang, X.; Lv, N.; Zhai, M.; El Saddik, A. Real-Time Parking Occupancy Detection for Gas Stations Based on Haar-AdaBoosting and CNN. IEEE Sens. J. 2017, 17, 6360–6367. [Google Scholar] [CrossRef]
- Mukherjee, A.; Paul, H.S.; Dey, S.; Banerjee, A. ANGELS for distributed analytics in IoT. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 565–570. [Google Scholar]
- Pirbhulal, S.; Zhang, H.; E Alahi, M.; Ghayvat, H.; Mukhopadhyay, S.; Zhang, Y.-T.; Wu, W. A Novel Secure IoT-Based Smart Home Automation System Using a Wireless Sensor Network. Sensors 2016, 17, 69. [Google Scholar] [CrossRef] [PubMed]
- Derhamy, H.; Eliasson, J.; Delsing, J.; Priller, P. A survey of commercial frameworks for the Internet of Things. In Proceedings of the IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), Luxembourg, 8–11 September 2015; pp. 1–8. [Google Scholar]
- Ammar, M.; Russello, G.; Crispo, B. Internet of Things: A survey on the security of IoT frameworks. J. Inf. Secur. Appl. 2018, 38, 8–27. [Google Scholar] [CrossRef]
- Li, F.; Vogler, M.; Claessens, M.; Dustdar, S. Towards Automated IoT Application Deployment by a Cloud-Based Approach. In Proceedings of the IEEE 6th International Conference on Service-Oriented Computing and Applications, Koloa, HI, USA, 16–18 January 2014; pp. 61–68. [Google Scholar]
- Yang, B.; Dong, H.; El Saddik, A. Development of a Self-Calibrated Motion Capture System by Nonlinear Trilateration of Multiple Kinects v2. IEEE Sens. J. 2017, 17, 2481–2491. [Google Scholar] [CrossRef]
- Panahandeh, G.; Mohammadiha, N.; Leijon, A.; Handel, P. Continuous Hidden Markov Model for Pedestrian Activity Classification and Gait Analysis. IEEE Trans. Instrum. Meas. 2013, 62, 1073–1083. [Google Scholar] [CrossRef]
- Rahman, M.A.; El Saddik, A.; Gueaieb, W. Building Dynamic Social Network From Sensory Data Feed. IEEE Trans. Instrum. Meas. 2010, 59, 1327–1341. [Google Scholar] [CrossRef]
- Lee, H.; Sullivan, S.J.; Schneiders, A.G. The use of the dual-task paradigm in detecting gait performance deficits following a sports-related concussion: a systematic review and meta-analysis. J. Sci. Med. Sport 2013, 16, 2–7. [Google Scholar] [CrossRef] [PubMed]
- Di Stasi, S.L.; Logerstedt, D.; Gardinier, E.S.; Snyder-Mackler, L. Gait patterns differ between ACL-reconstructed athletes who pass return-to-sport criteria and those who fail. Am. J. Sports Med. 2013, 41, 1310–1318. [Google Scholar] [CrossRef]
- Godfrey, A.; Del Din, S.; Barry, G.; Mathers, J.C.; Rochester, L. Instrumenting gait with an accelerometer: A system and algorithm examination. Med. Eng. Phys. 2015, 37, 400–407. [Google Scholar] [CrossRef]
- Del Din, S.; Godfrey, A.; Rochester, L. Validation of an Accelerometer to Quantify a Comprehensive Battery of Gait Characteristics in Healthy Older Adults and Parkinson’s Disease: Toward Clinical and at Home Use. IEEE J. Biomed. Heal. Inform. 2016, 20, 838–847. [Google Scholar] [CrossRef]
- Mota, F.A.O.; Biajo, V.H.M.; Mota, H.O.; Vasconcelos, F.H. A wireless sensor network for the biomechanical analysis of the gait. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Hafidh, B.; Al Osman, H.; El Saddik, A. SmartInsole: A foot-based activity and gait measurement device. In Proceedings of the 2013 IEEE International Conference on Multimedia and Expo Workshops (ICMEW), San Jose, CA, USA, 15–19 July 2013; pp. 1–4. [Google Scholar]
- Zhuang, Y.; Gong, J.; Kerrigan, D.C.; Bennett, B.C.; Lach, J.; Russell, S. Gait tracker shoe for accurate step-by-step determination of gait parameters. In Proceedings of the 2016 IEEE 13th International Conference on Wearable and Implantable Body Sensor Networks (BSN), San Francisco, CA, USA, 14–17 June 2016; pp. 13–18. [Google Scholar]
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef] [PubMed]
- Jagos, H.; Pils, K.; Haller, M.; Wassermann, C.; Chhatwal, C.; Rafolt, D.; Rattay, F. Mobile gait analysis via eSHOEs instrumented shoe insoles: A pilot study for validation against the gold standard GAITRite. J. Med. Eng. Technol. 2017, 41, 375–386. [Google Scholar] [CrossRef] [PubMed]
- Gerlach, C.; Krumm, D.; Illing, M.; Lange, J.; Kanoun, O.; Odenwald, S.; Hubler, A. Printed MWCNT-PDMS-Composite Pressure Sensor System for Plantar Pressure Monitoring in Ulcer Prevention. IEEE Sens. J. 2015, 15, 3647–3656. [Google Scholar] [CrossRef]
- Weizman, Y.; Fuss, F.K. Development of Instrumented Soccer Footwear for Kicking Analysis and Training Purposes. Procedia Eng. 2015, 112, 157–162. [Google Scholar] [CrossRef]
- Tan, A.M.; Fuss, F.K.; Weizman, Y.; Troynikov, O. Development of a smart insole for medical and sports purposes. Procedia Eng. 2015, 112, 152–156. [Google Scholar] [CrossRef]
- Motha, L.; Kim, J.; Kim, W.S. Instrumented rubber insole for plantar pressure sensing. Org. Electron. Phys. Mater. Appl. 2015, 23, 82–86. [Google Scholar] [CrossRef]
- Crea, S.; Donati, M.; De Rossi, S.; Oddo, C.; Vitiello, N. A Wireless Flexible Sensorized Insole for Gait Analysis. Sensors 2014, 14, 1073–1093. [Google Scholar] [CrossRef] [PubMed]
- Braun, B.J.; Veith, N.T.; Hell, R.; Döbele, S.; Roland, M.; Rollmann, M.; Holstein, J.; Pohlemann, T. Validation and reliability testing of a new, fully integrated gait analysis insole. J. Foot Ankle Res. 2015, 8, 54. [Google Scholar] [CrossRef] [PubMed]
- Minto, S.; Zanotto, D.; Boggs, E.M.; Rosati, G.; Agrawal, S.K. Validation of a Footwear-Based Gait Analysis System With Action-Related Feedback. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 971–980. [Google Scholar] [CrossRef] [PubMed]
- Connect Multiple Bluetooth Devices to one Computer. Available online: support.apple.com/HT201171 (accessed on 13 November 2017).
- Srisooksai, T.; Keamarungsi, K.; Lamsrichan, P.; Araki, K. Practical data compression in wireless sensor networks: A survey. J. Netw. Comput. Appl. 2012, 35, 37–59. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Melodia, T.; Chowdhury, K.R. A survey on wireless multimedia sensor networks. Comput. Netw. 2007, 51, 921–960. [Google Scholar] [CrossRef]
- Misra, S.; Reisslein, M.; Xue, G. A survey of multimedia streaming in wireless sensor networks. IEEE Commun. Surv. Tutor. 2008, 10, 18–39. [Google Scholar] [CrossRef]
- Badawi, H.; Laamarti, F.; Arafsha, F.; El Saddik, A. Standardizing a Shoe Insole Based on ISO/IEEE 11073 Personal Health Device (X73-PHD) Standards. In Information Technology and Systems. ICITS 2019. Advances in Intelligent Systems and Computing; Rocha, Á., Ferrás, C., Paredes, M., Eds.; Springer: Cham, Switzerland, 2019; Volume 918, pp. 764–778. ISBN 978-3-030-11890-7. [Google Scholar]
- Arafsha, F.; Hanna, C.; Aboualmagd, A.; Fraser, S.; El Saddik, A. Instrumented Wireless SmartInsole System for Mobile Gait Analysis: A Validation Pilot Study with Tekscan Strideway. J. Sens. Actuator Netw. 2018, 7, 36. [Google Scholar] [CrossRef]
- Arafsha, F.; Laamarti, F.; Saddik, A. El Development of a wireless CPS for gait parameters measurement and analysis. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–5. [Google Scholar]
- Yaniger, S.I. Force Sensing Resistors: An Overview of the Technology. In Proceedings of the Electro International, New York, NY, USA, 16–18 April 1991; pp. 666–668. [Google Scholar]
- SparkFun IMU Breakout-MPU-9250. Available online: https://www.sparkfun.com/products/13762 (accessed on 2 February 2018).
- Arafsha, F. Configurable Medical Cyber-Physical System Framework for Physical Activity Monitoring. Ph.D. Thesis, University of Ottawa, Ottawa, ON, Canada, February 2019. Available online: https://ruor.uottawa.ca/handle/10393/38793 (accessed on 6 February 2019).
- Howell, A.M. Insole-Based Gait Analysis. 2012. Available online: https://search.proquest.com/openview/f3f0e8280a937d295579bdb3fbe5cae4/1?pq-origsite=gscholar&cbl=18750&diss=y (accessed on 2 February 2018).
- Tao, Y.; Wu, X.; Yang, Y.; Qian, H.; Zhang, C.; Xu, Y. An intelligent shoe system: Evaluation of weight load approaches by gait analysis. In Proceedings of the 2012 International Conference on Computerized Healthcare (ICCH), Hong Kong, China, 17–18 December 2012; pp. 145–151. [Google Scholar]
- Edgar, S.R.; Swyka, T.; Fulk, G.; Sazonov, E.S. Wearable shoe-based device for rehabilitation of stroke patients. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3772–3775. [Google Scholar] [CrossRef]
- Howell, A.M.; Kobayashi, T.; Hayes, H.A.; Foreman, K.B.; Bamberg, S.J.M. Kinetic gait analysis using a low-cost insole. IEEE Trans. Biomed. Eng. 2013, 60, 3284–3290. [Google Scholar] [CrossRef] [PubMed]
- Periyasamy, R.; Mishra, A.; Anand, S.; Ammini, A.C. Preliminary investigation of foot pressure distribution variation in men and women adults while standing. Foot 2011, 21, 142–148. [Google Scholar] [CrossRef] [PubMed]
- Florez, J.A.; Velasquez, A. Calibration of force sensing resistors (fsr) for static and dynamic applications. In Proceedings of the 2010 IEEE ANDESCON, Bogota, Colombia, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Strideway System. Available online: https://www.tekscan.com/products-solutions/systems/strideway-system (accessed on 12 February 2018).
- Rouhani, H.; Favre, J.; Crevoisier, X.; Aminian, K. A wearable system for multi-segment foot kinetics measurement. J. Biomech. 2014, 47, 1704–1711. [Google Scholar] [CrossRef] [PubMed]
- Kolodner, E.K.; Tal, S.; Kyriazis, D.; Naor, D.; Allalouf, M.; Bonelli, L.; Brand, P.; Eckert, A.; Elmroth, E.; Gogouvitis, S.V.; et al. A Cloud Environment for Data-intensive Storage Services. In Proceedings of the 2011 IEEE Third International Conference on Cloud Computing Technology and Science, Athens, Greece, 29 November–1 December 2011; pp. 357–366. [Google Scholar]
- Kocabas, O.; Soyata, T.; Aktas, M.K. Emerging Security Mechanisms for Medical Cyber Physical Systems. IEEE/ACM Trans. Comput. Biol. Bioinform. 2016, 13, 401–416. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arafsha, F.; Laamarti, F.; El Saddik, A. Cyber-Physical System Framework for Measurement and Analysis of Physical Activities. Electronics 2019, 8, 248. https://doi.org/10.3390/electronics8020248
Arafsha F, Laamarti F, El Saddik A. Cyber-Physical System Framework for Measurement and Analysis of Physical Activities. Electronics. 2019; 8(2):248. https://doi.org/10.3390/electronics8020248
Chicago/Turabian StyleArafsha, Faisal, Fedwa Laamarti, and Abdulmotaleb El Saddik. 2019. "Cyber-Physical System Framework for Measurement and Analysis of Physical Activities" Electronics 8, no. 2: 248. https://doi.org/10.3390/electronics8020248
APA StyleArafsha, F., Laamarti, F., & El Saddik, A. (2019). Cyber-Physical System Framework for Measurement and Analysis of Physical Activities. Electronics, 8(2), 248. https://doi.org/10.3390/electronics8020248