A Mixed Deep Recurrent Neural Network for MEMS Gyroscope Noise Suppressing


 ,
, 
Abstract
:1. Introduction
- (1)
- It was the first time a mixed LSTM and GRU method has been applied to MEMS gyroscope noise modeling, which might be an inspiration for applying DL in MEMS IMU de-noising.
- (2)
- It was a bright idea to develop a mixed multi-layer RNN; detailed analysis of the multi-layer LSTM, multi-layer GRU, LSTM–GRU, and GRU–LSTM were presented and compared, which could provide valid reference while selecting proper methods for MEMS gyroscope noise modeling.
2. Methods
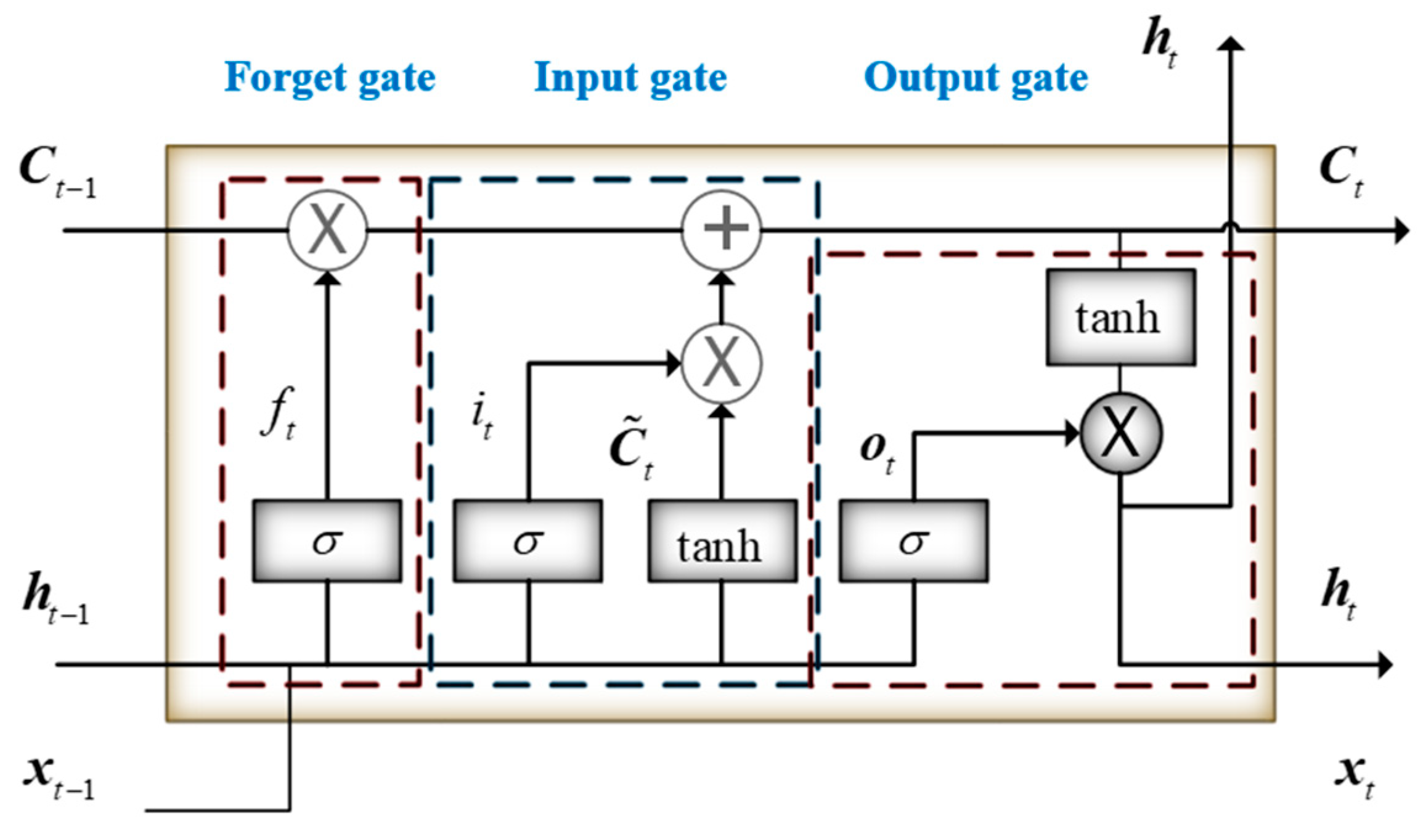
2.1. Long Short Term Memory (LSTM)
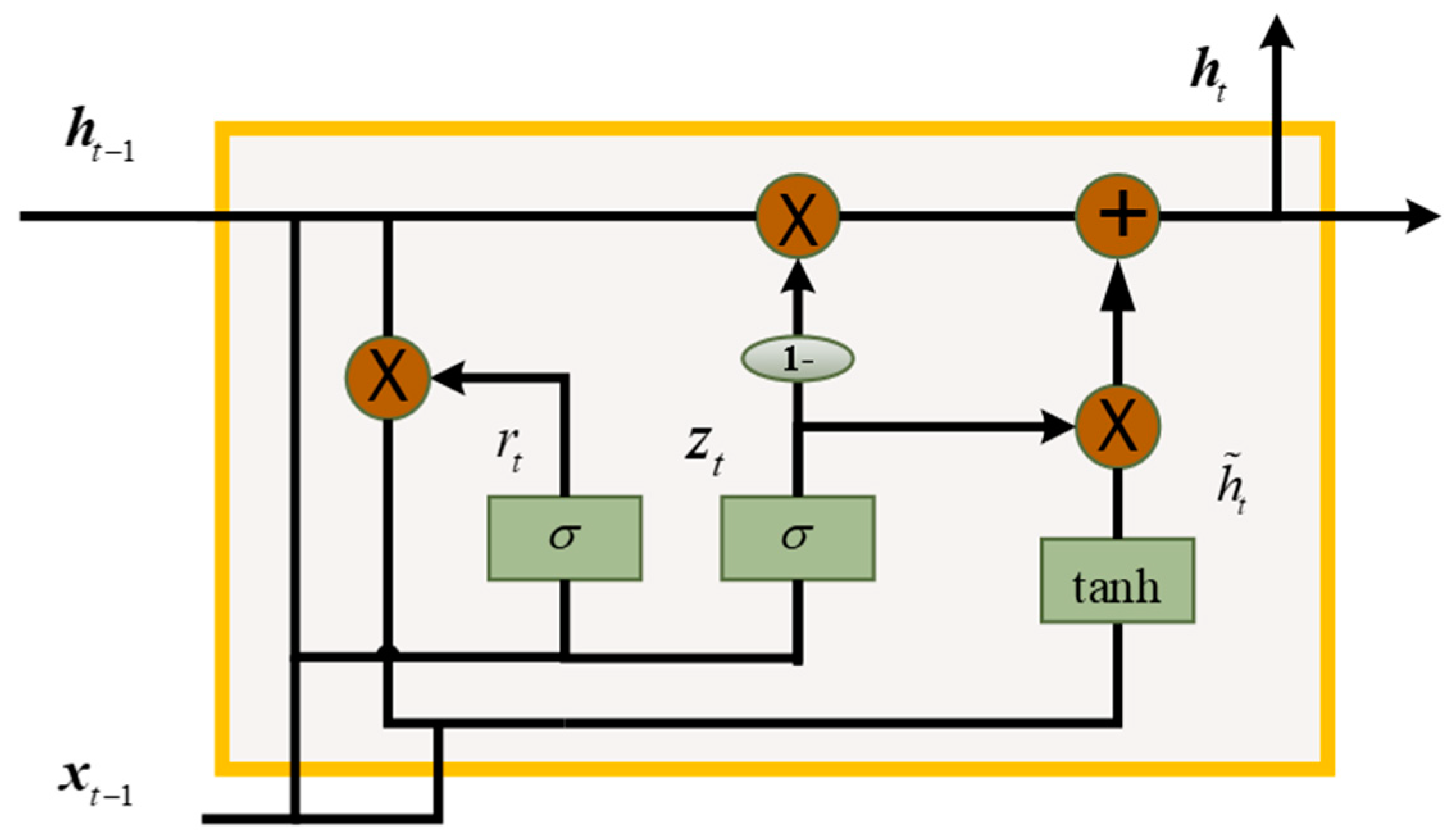
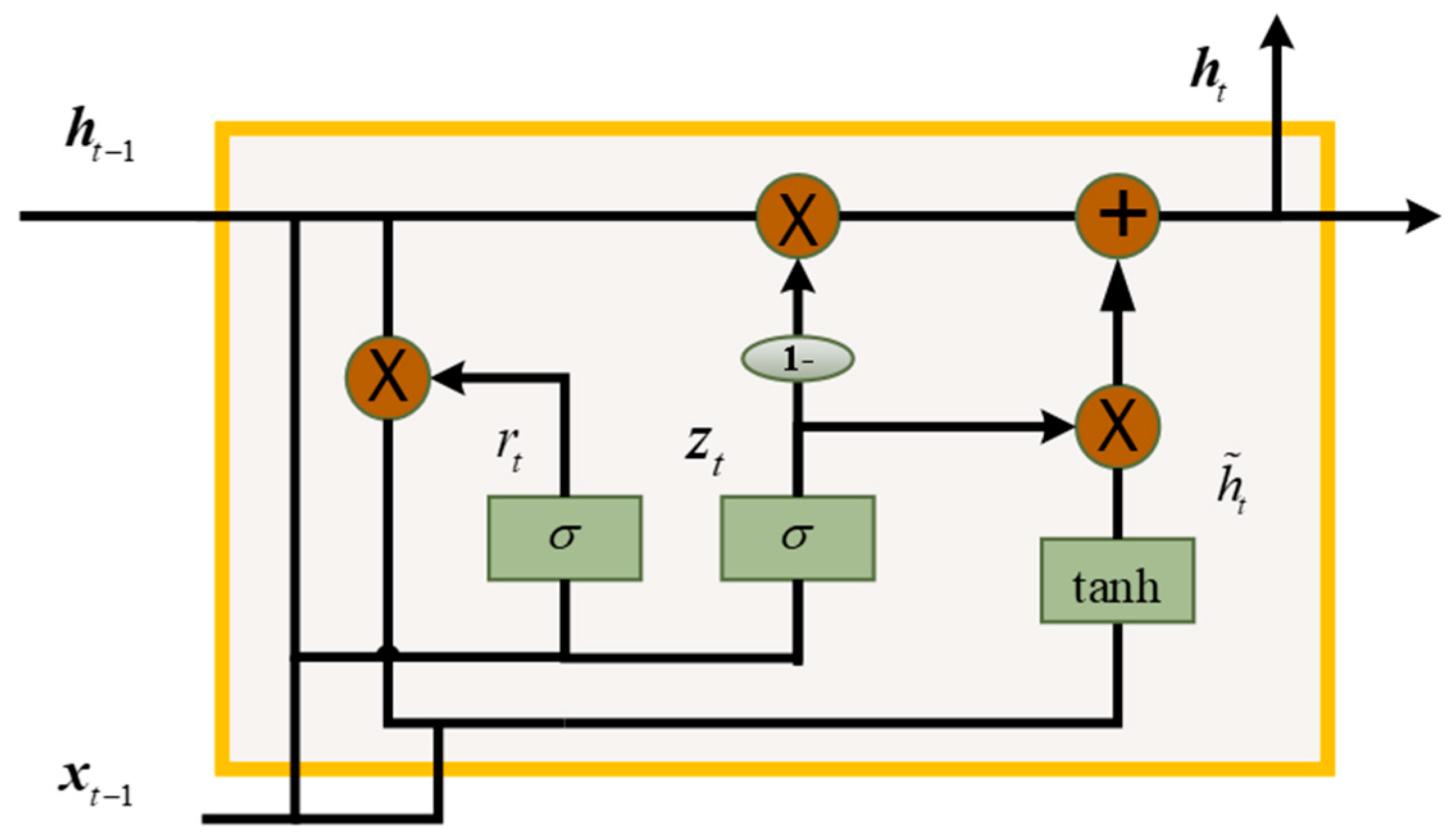
2.2. Gated Recurrent Unit (GRU)
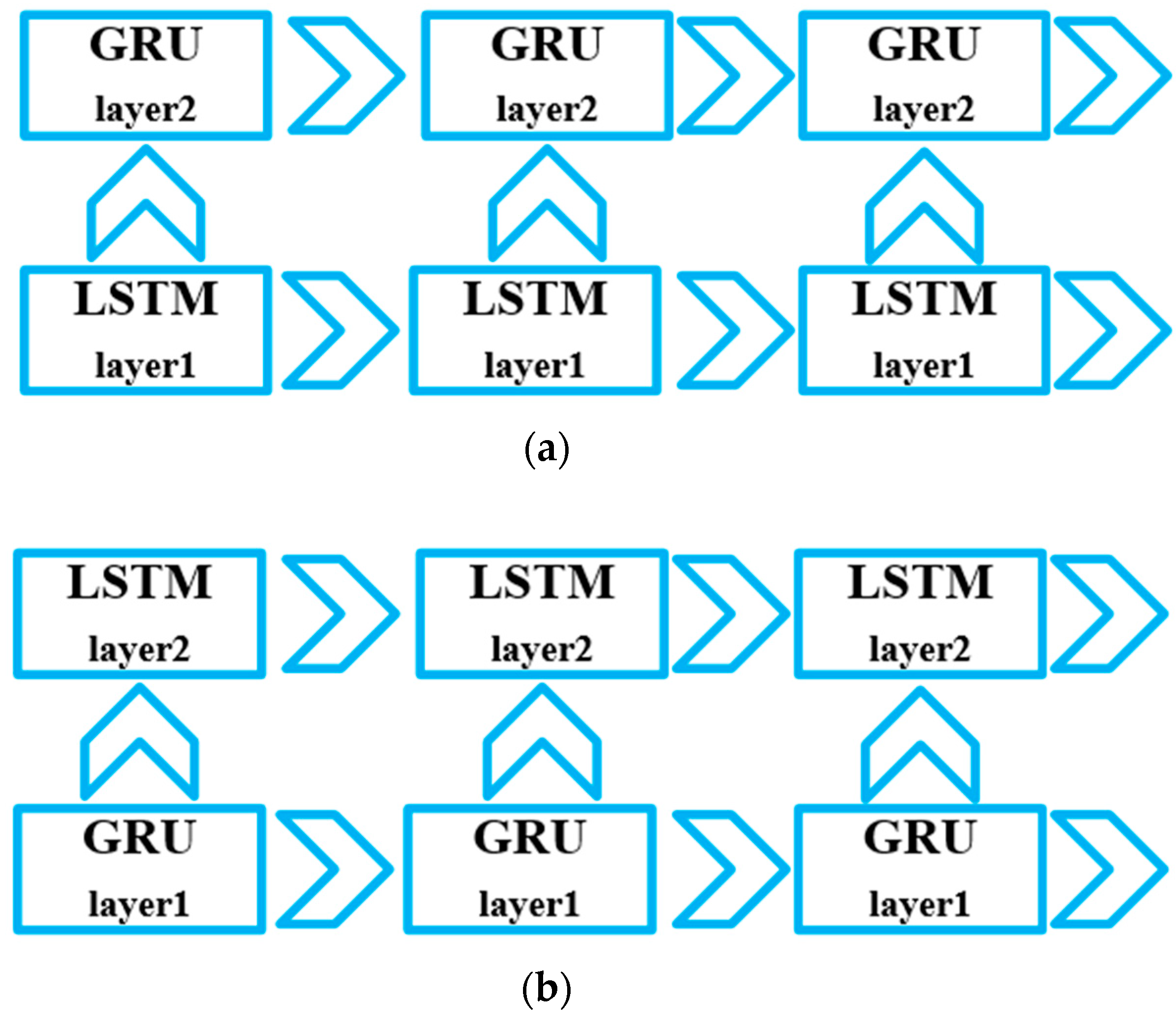
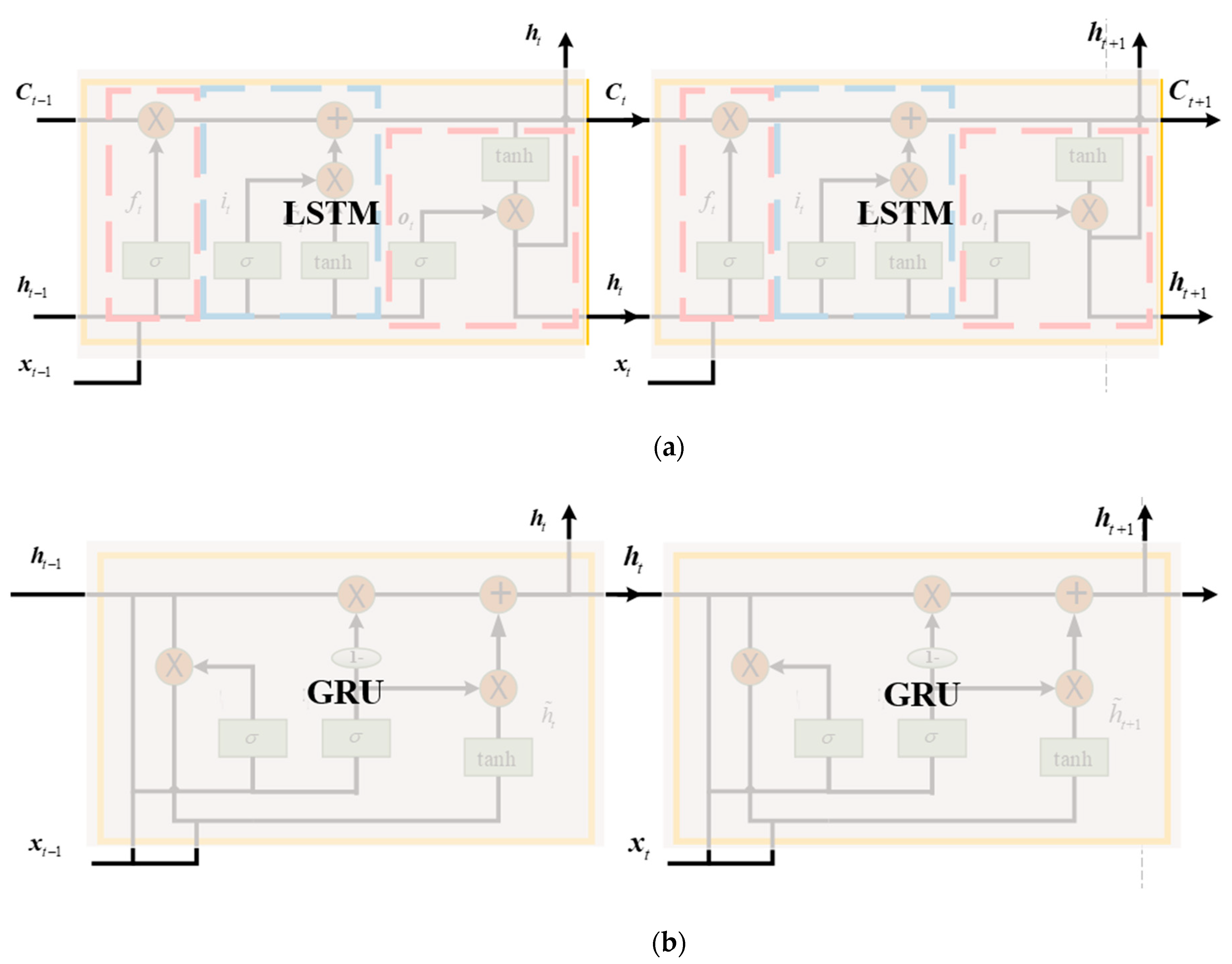
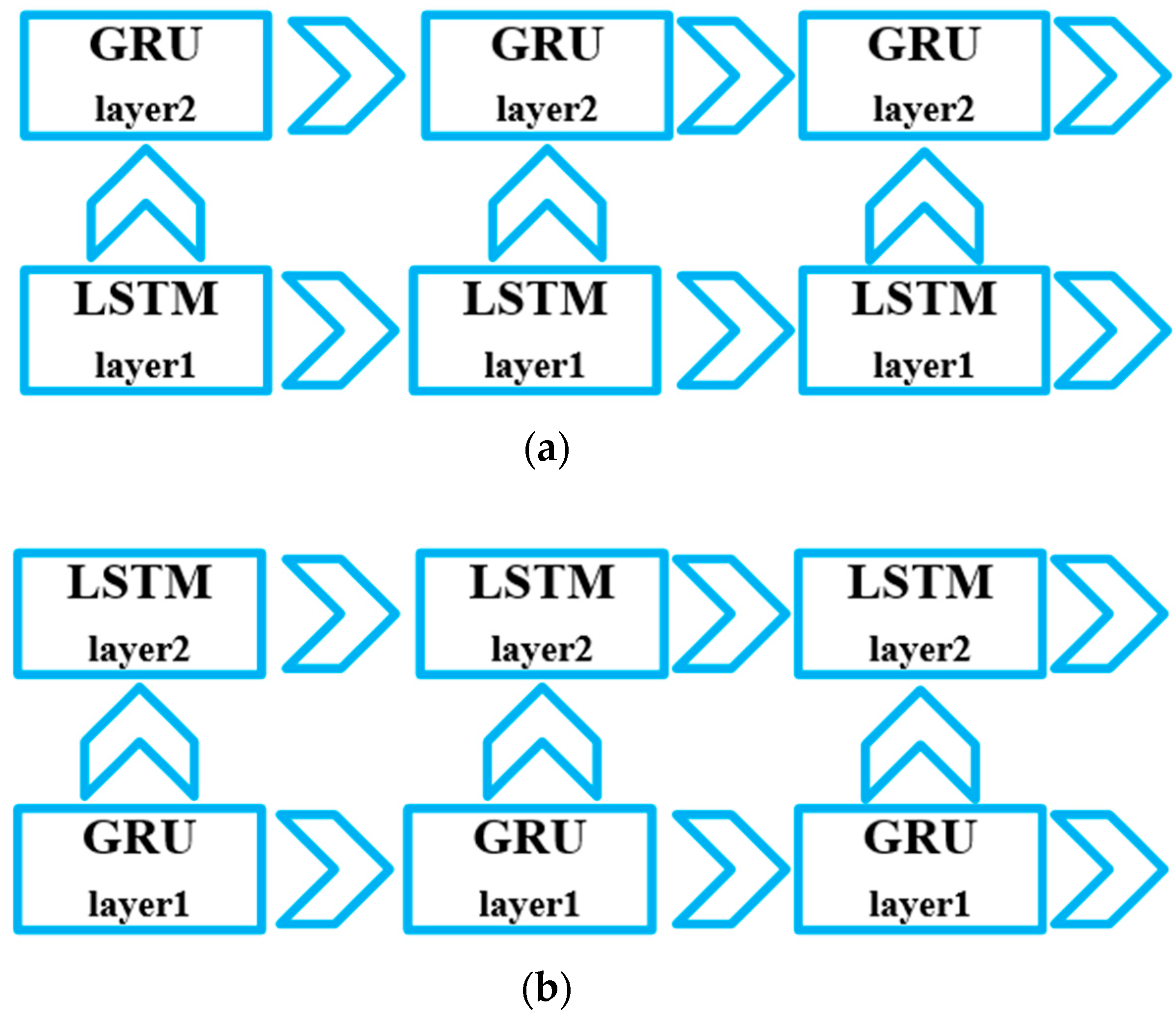
2.3. Mixed LSTM and GRU
3. Results
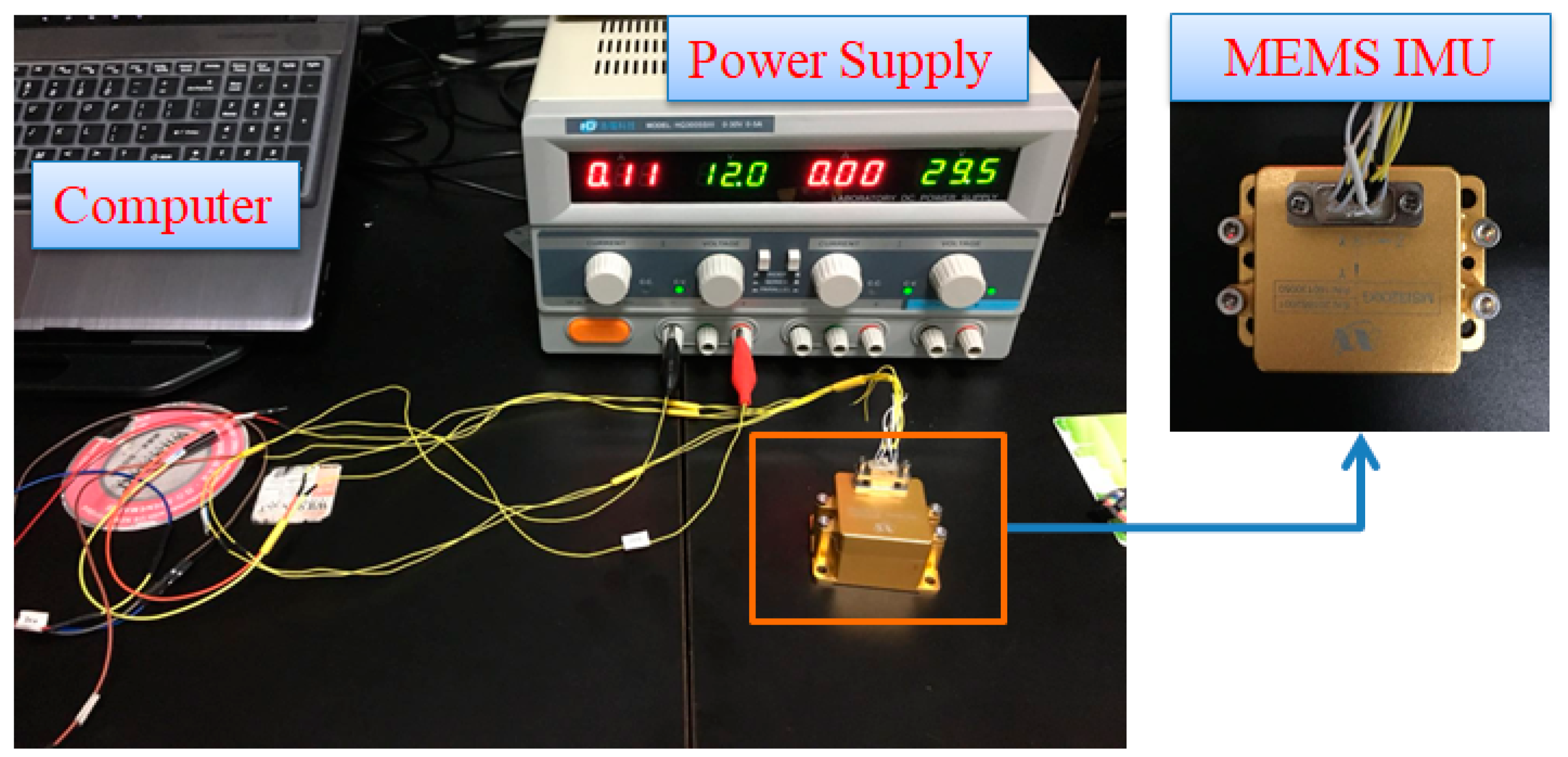
3.1. Input Data and Training
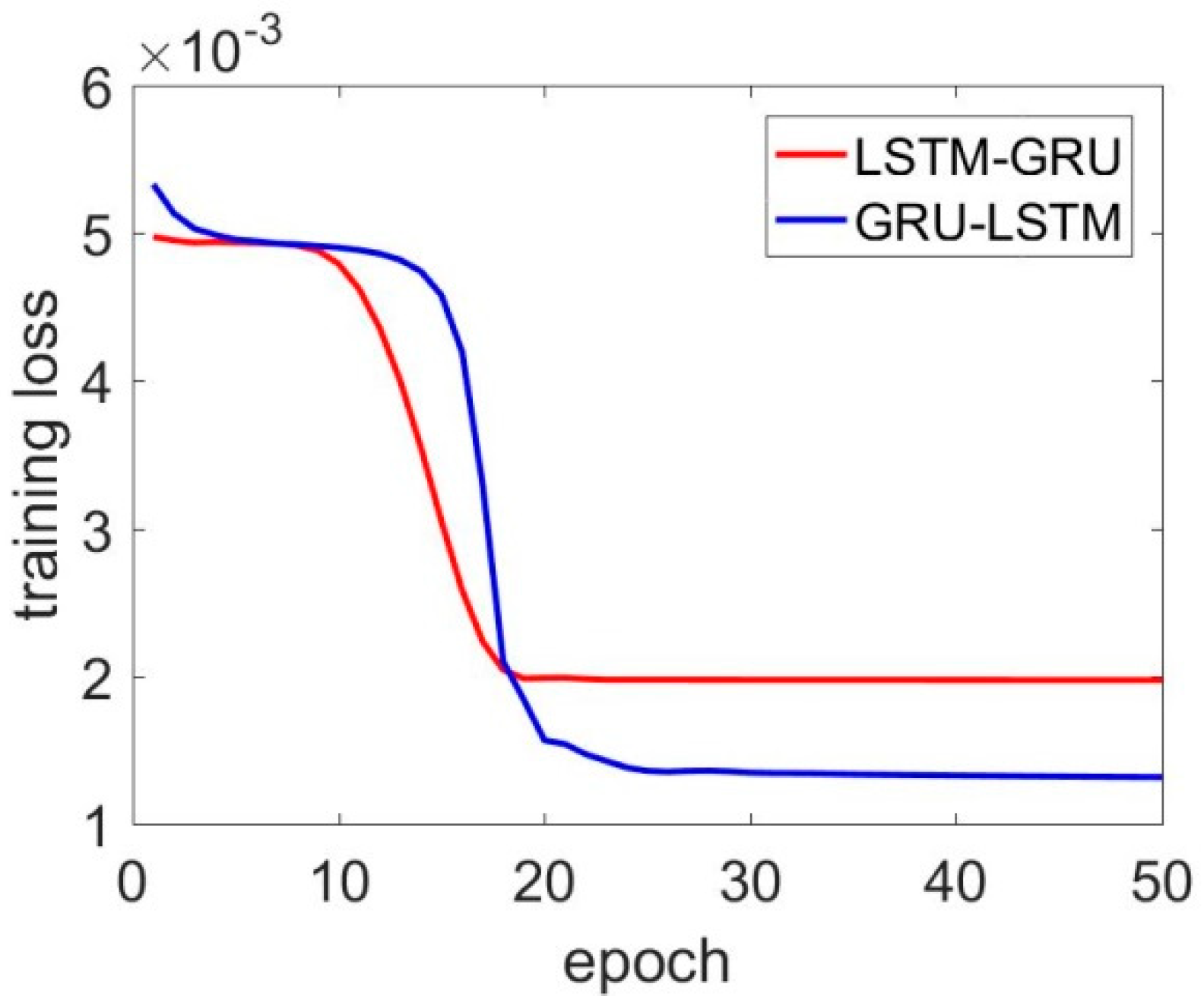
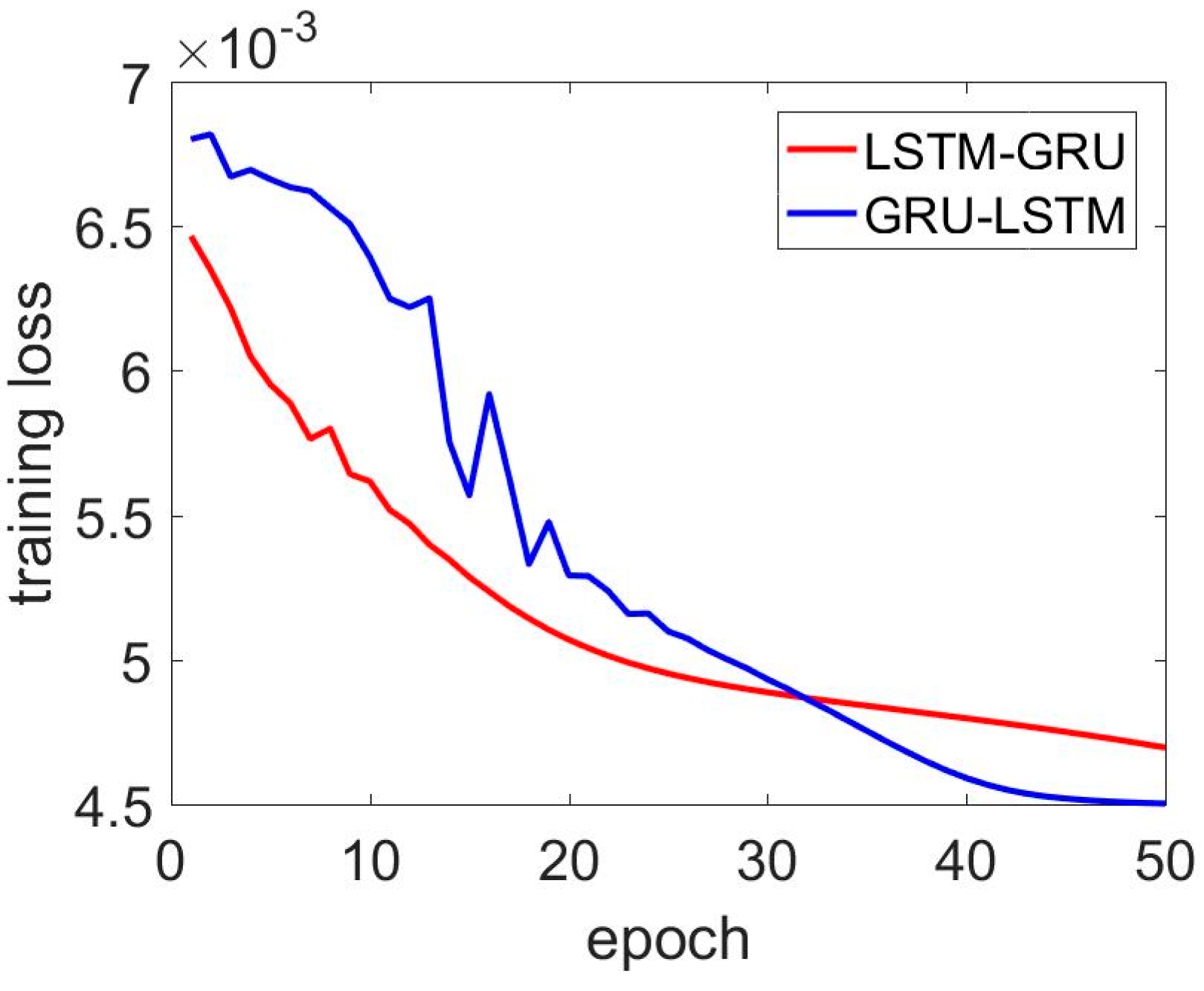
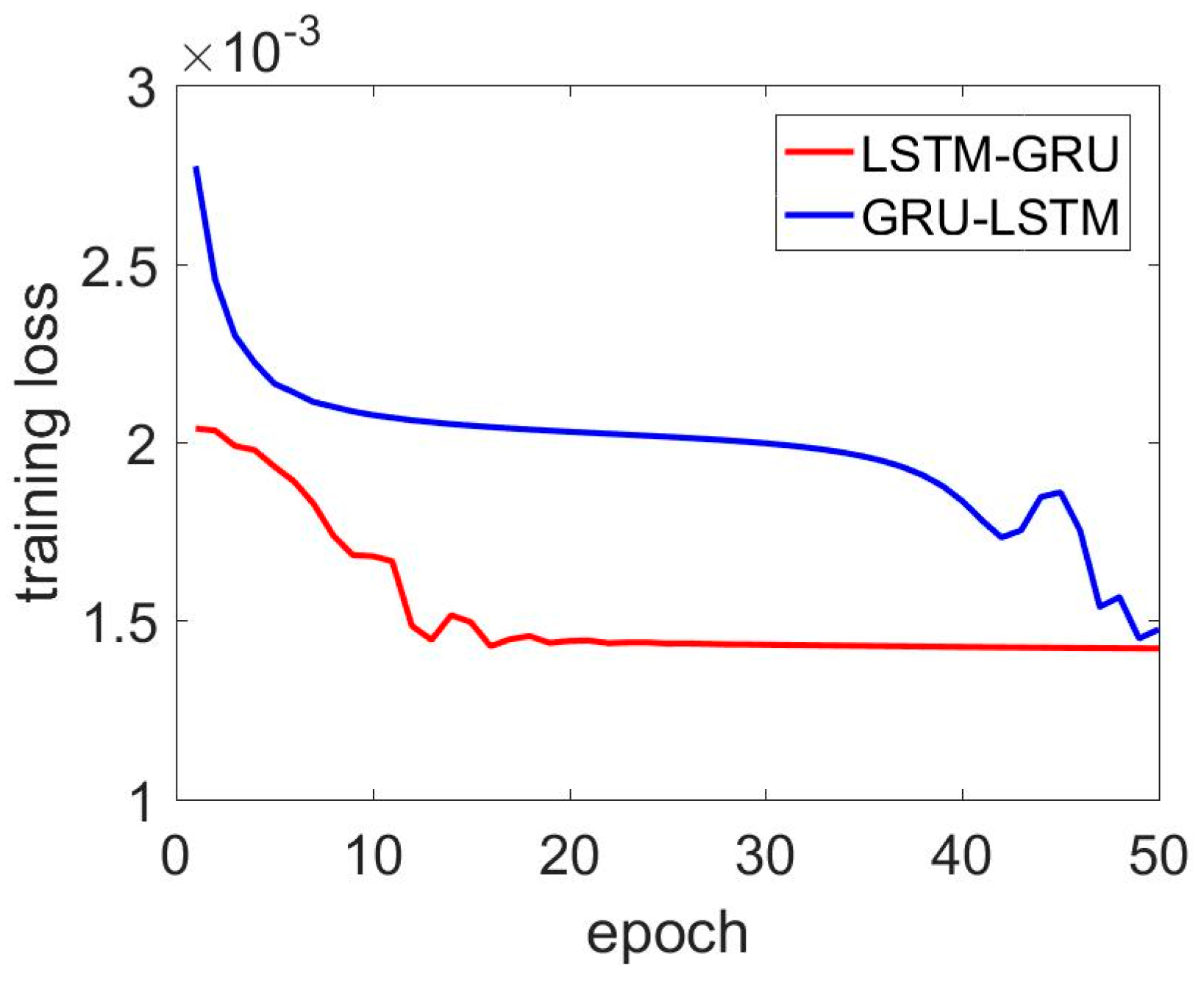
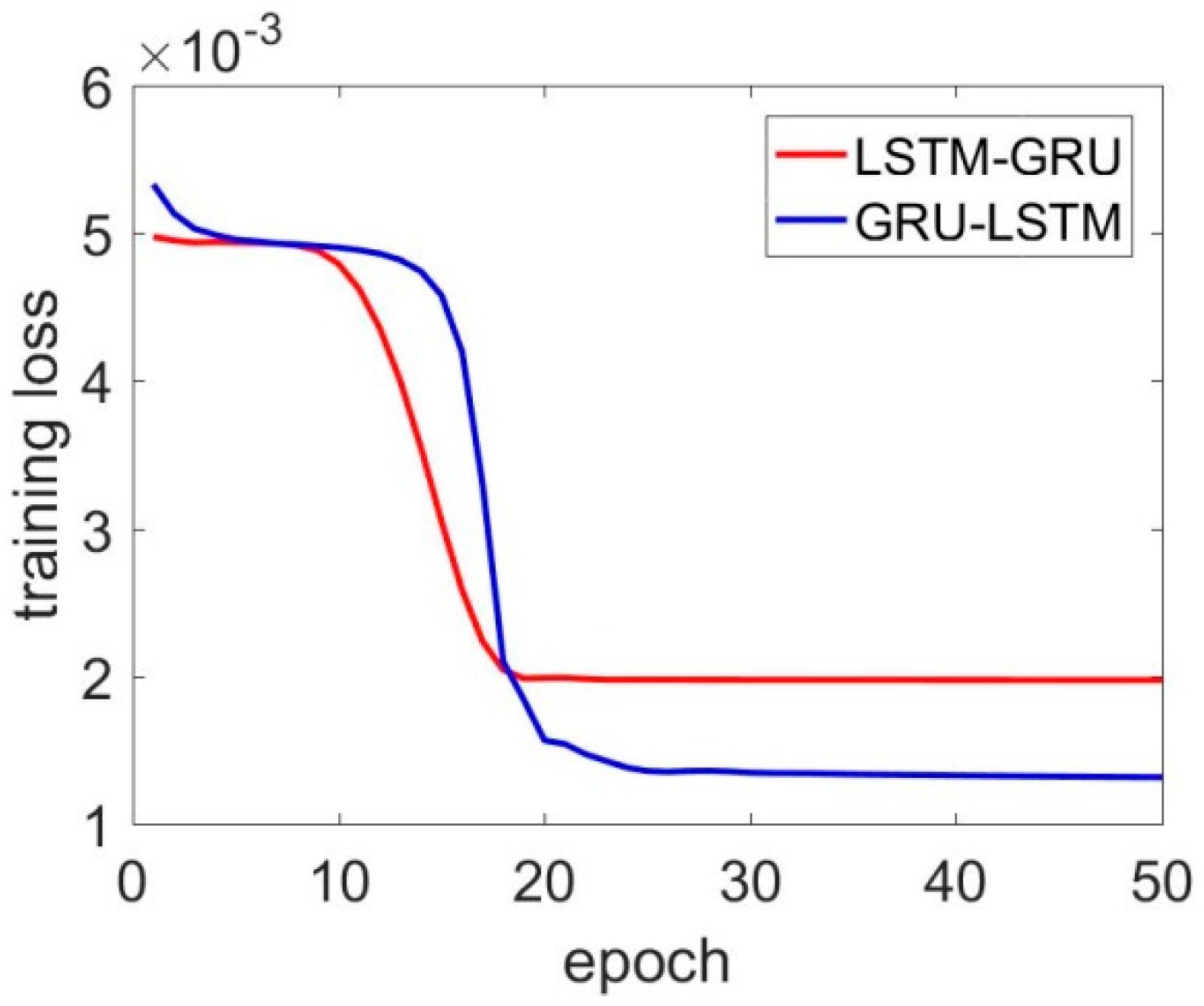
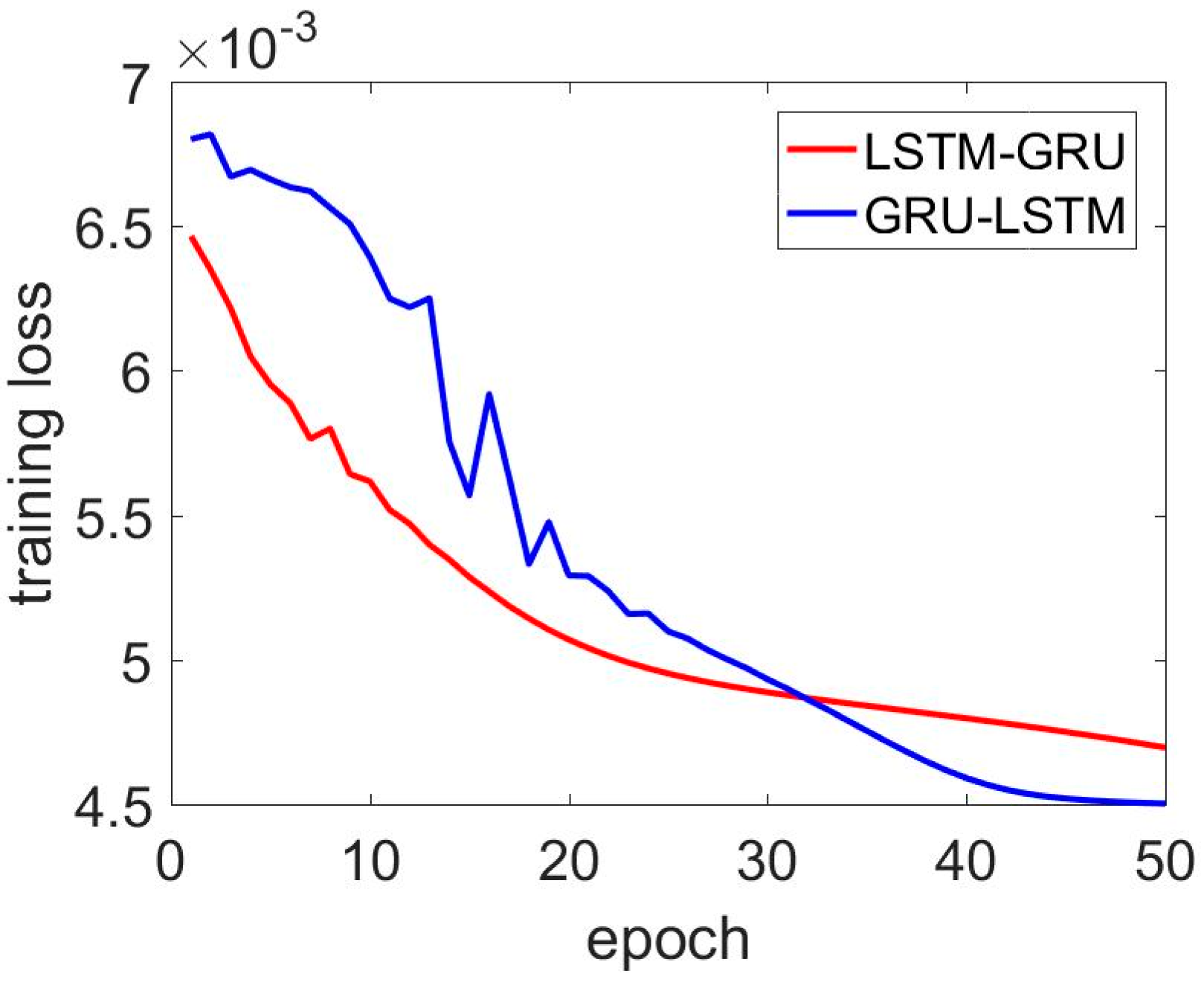
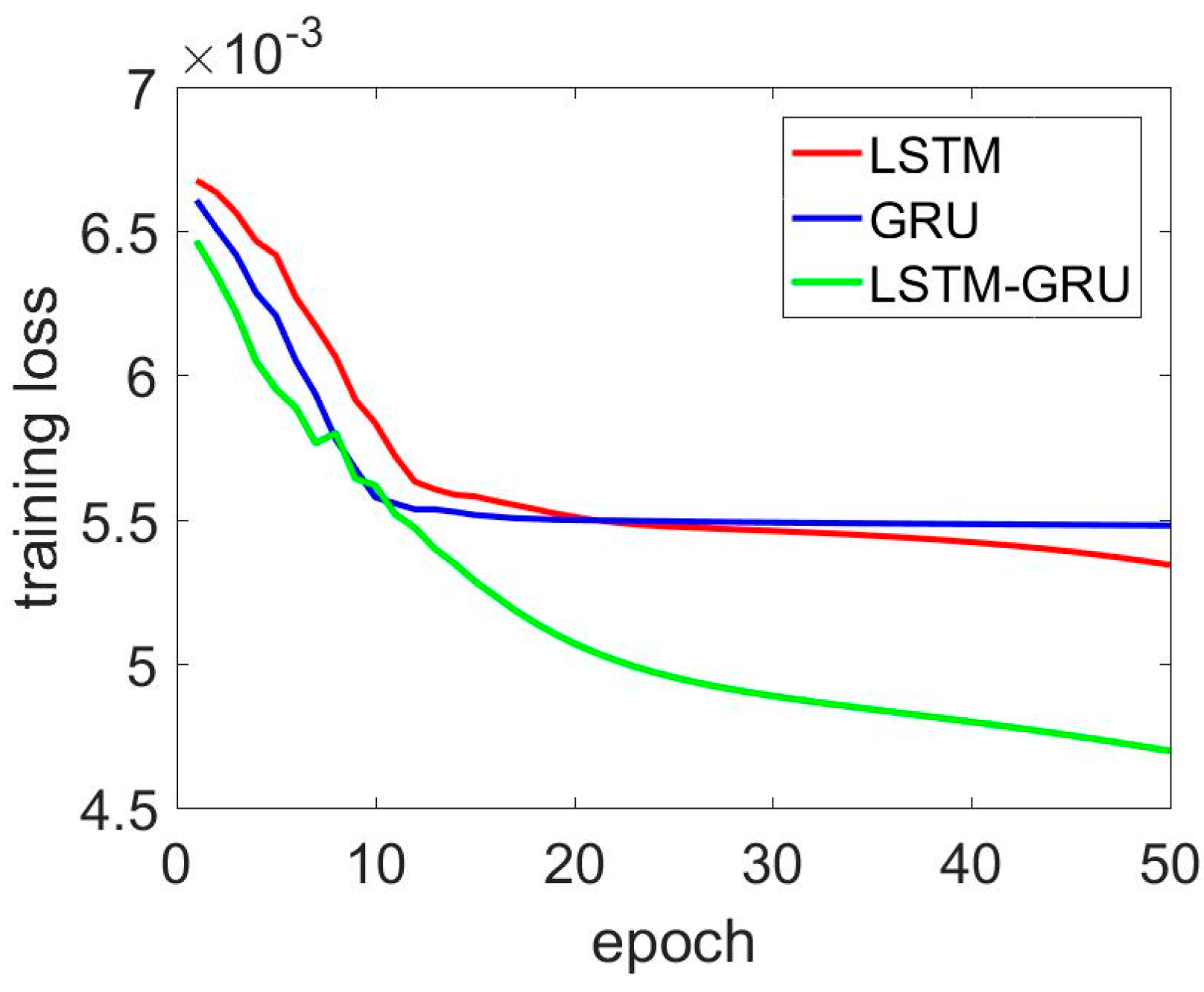
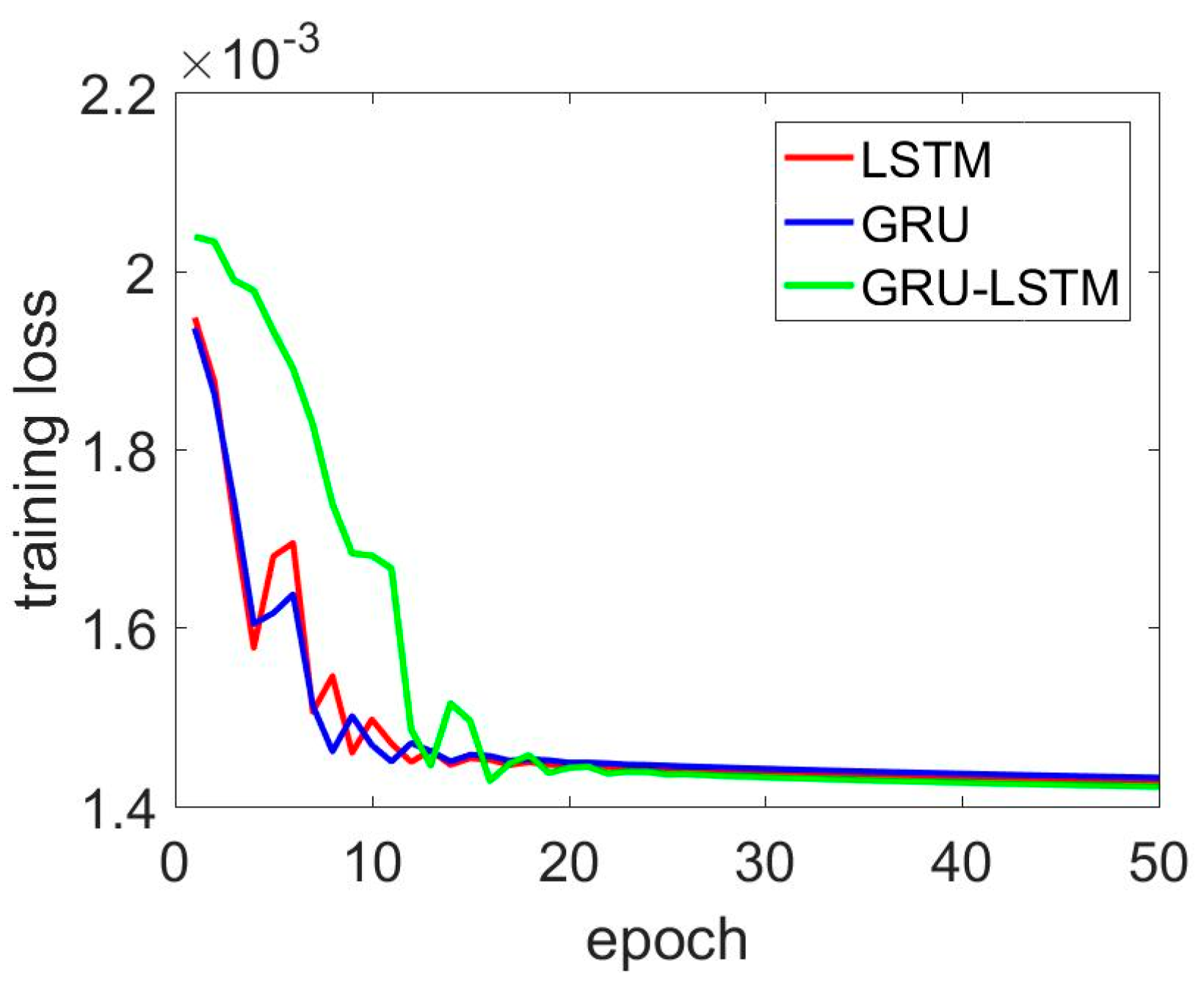
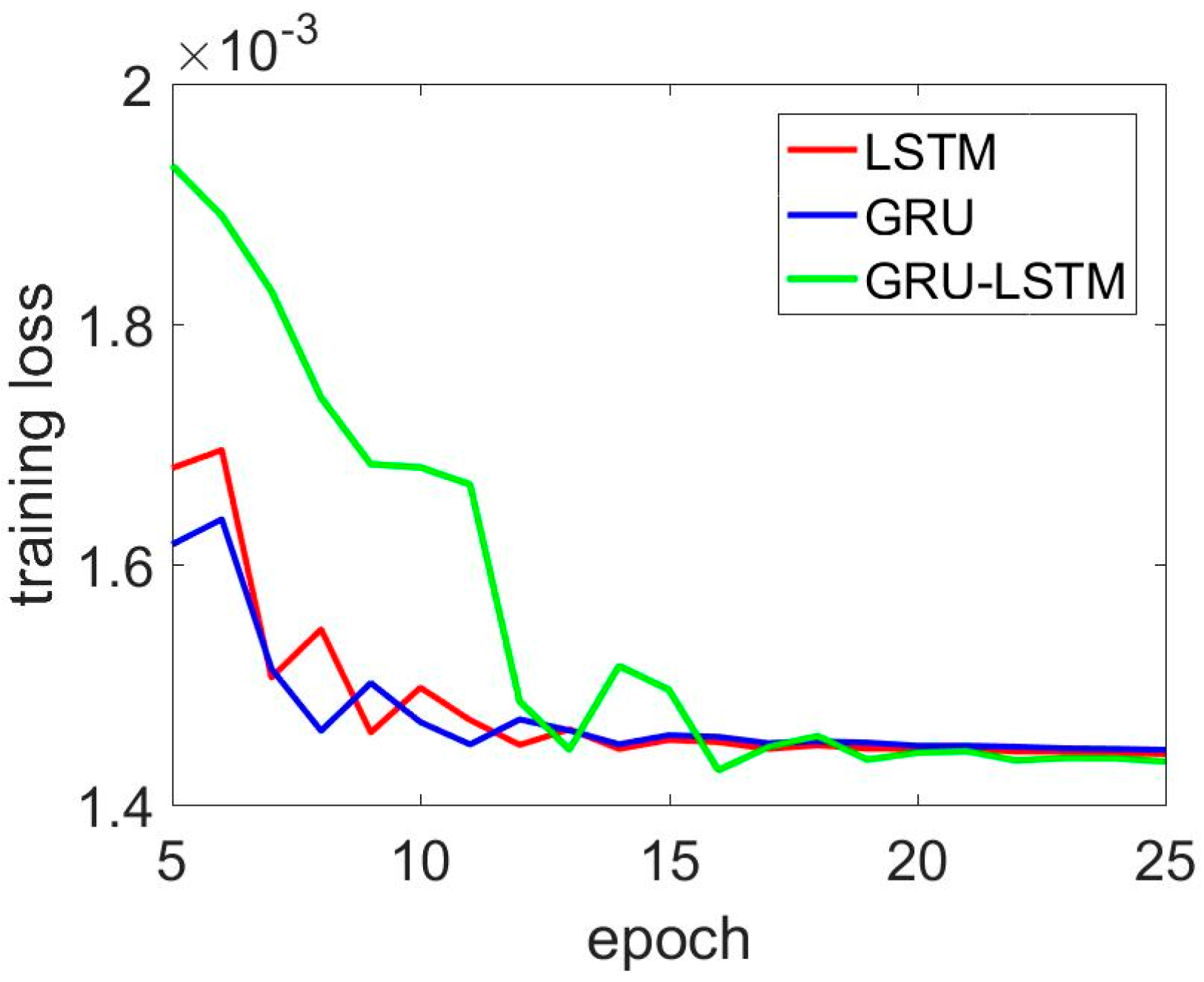
3.2. Comparison of LSTM–GRU and GRU–LSTM
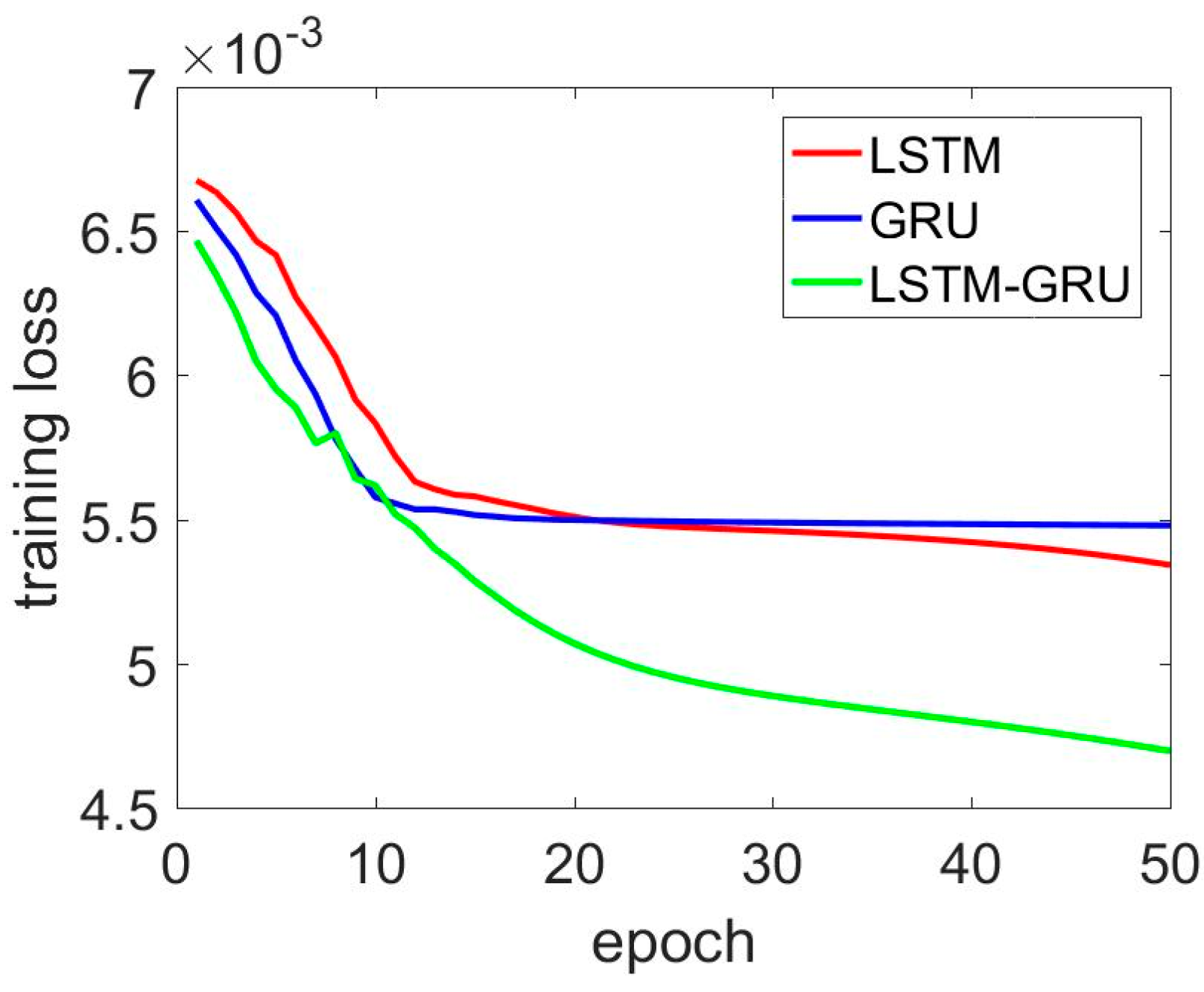
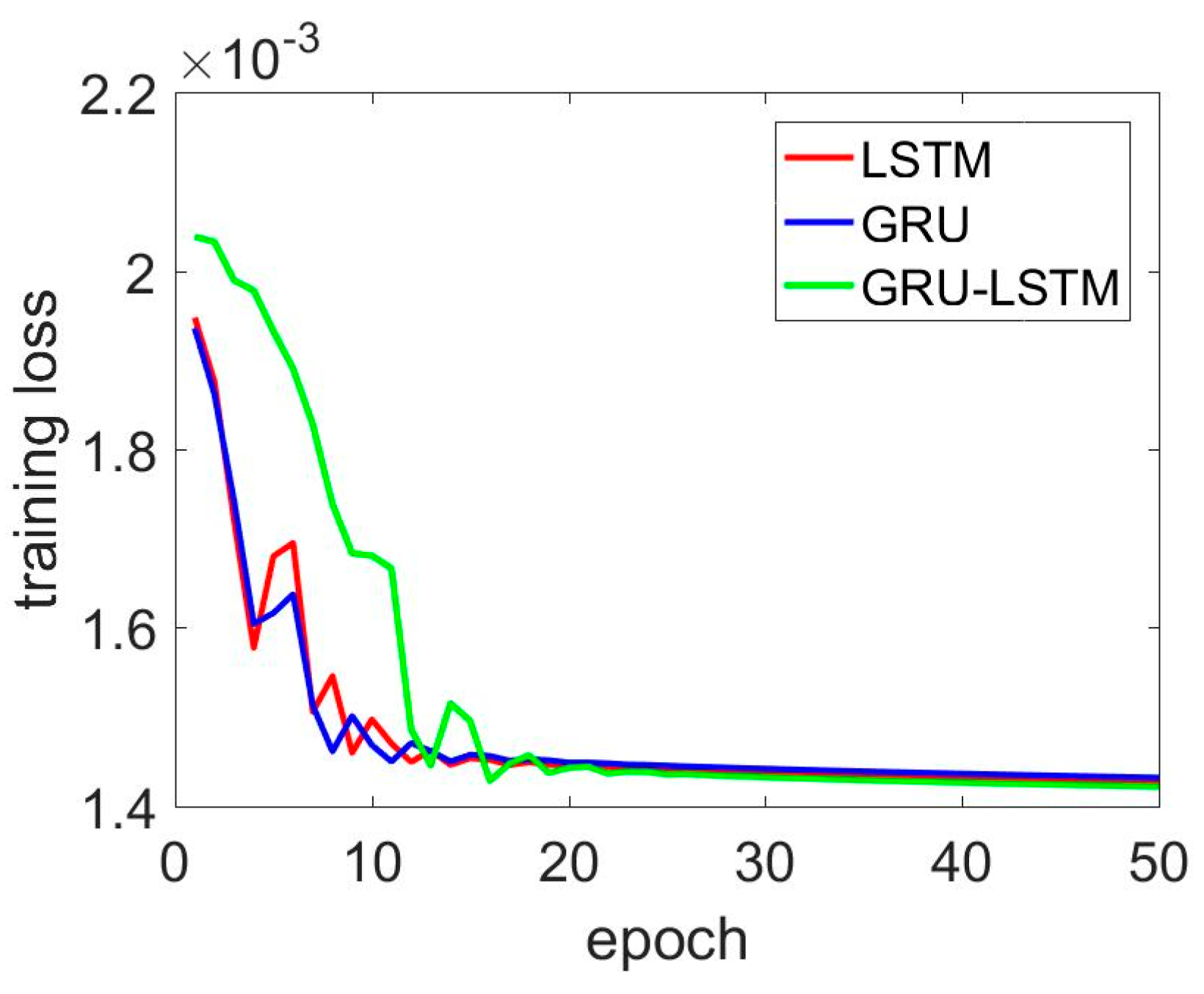
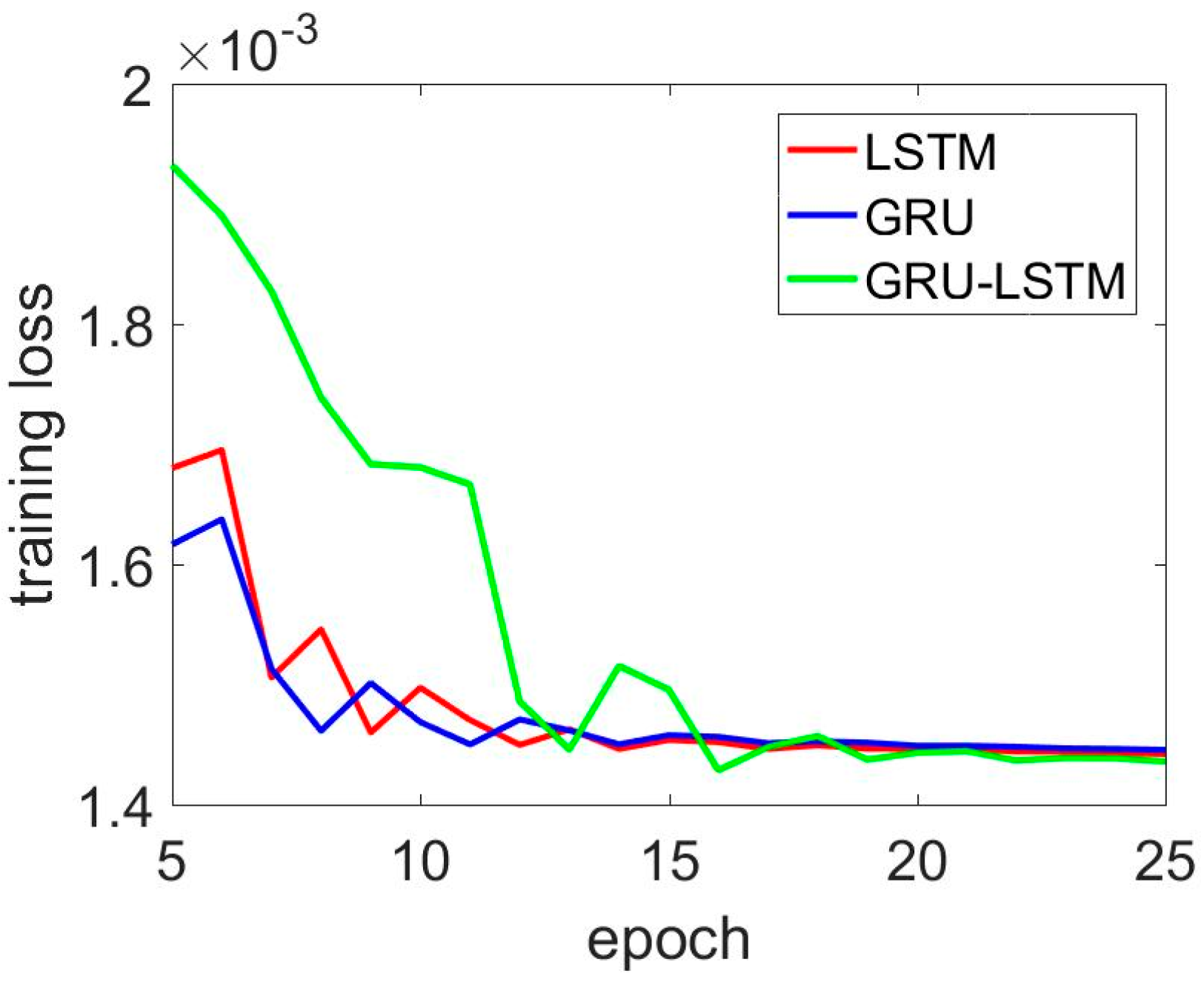
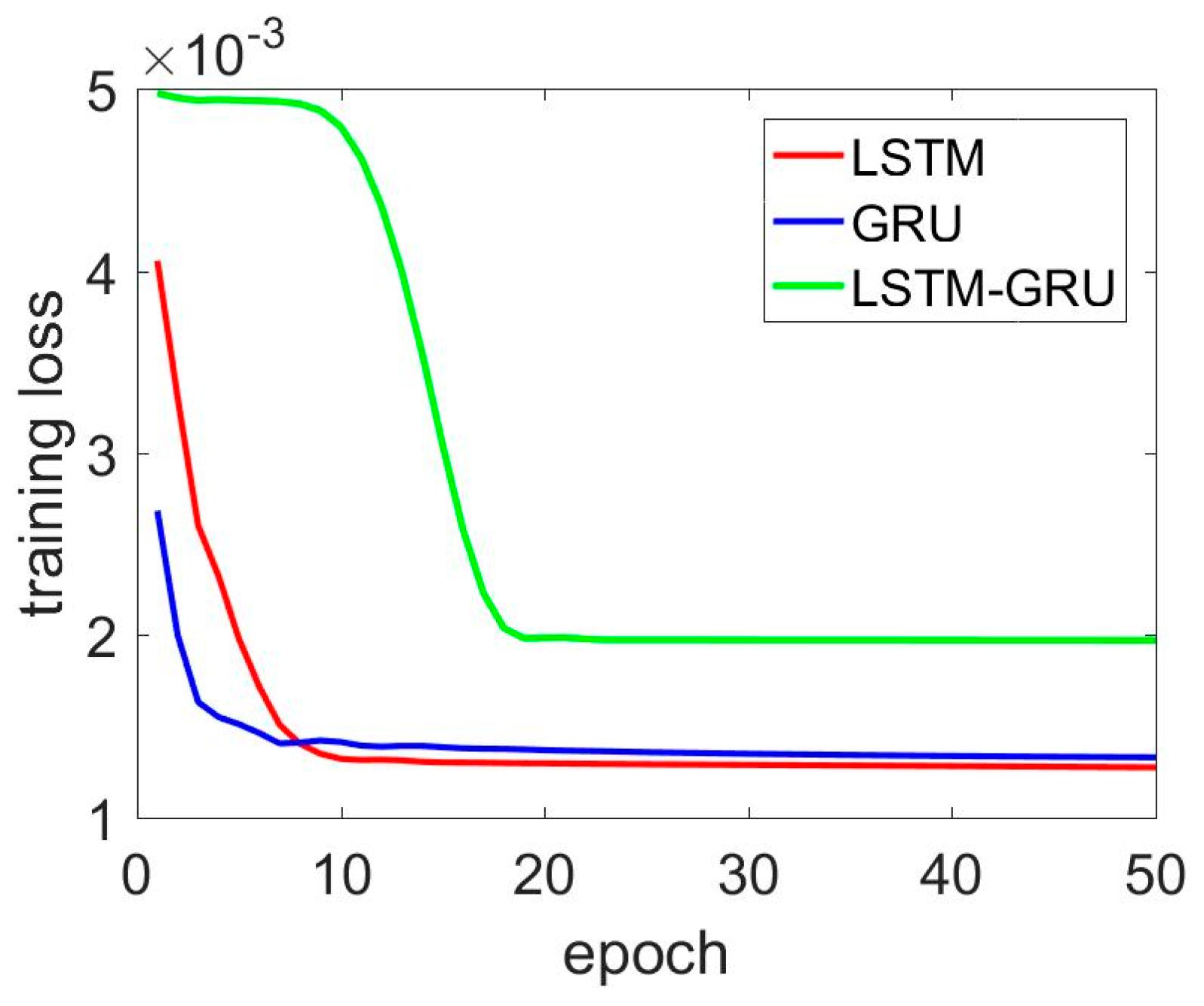
3.3. Comparison of LSTM–GRU, Two-Layer LSTM, and Two-Layer GRU
- (1)
- There was an obvious improvement in the attitude errors for all the three deep neural networks. The two-layer LSTM performed 64.4%, 49.3%, and 53.3% improvements in attitude errors, the two-layer GRU performed 56.3%, 54.5%, and 47.9% decreases in attitude errors, and the attitude errors of LSTM–GRU decreased by 72.2%, 69.3%, and 58.4%.
- (2)
- Specifically, for the x axis gyroscope data, LSTM–GRU had a large training loss, but the LSTM–GRU still showed 7.8% and 15.9% improvements compared with the two-layer LSTM and two-layer GRU. The minor difference of the standard deviation of the de-noised signals may account for this.
4. Discussion
5. Conclusions
- (1)
- Two-layer LSTM, two-layer GRU, LSTM–GRU, and GRU–LSTM were effective for this application. The two-layer LSTM performed a 64.4%, 49.3%, and 53.3% improvement in attitude errors, the two-layer GRU performed a 56.3%, 49.3%, and 47.9% decrease in attitude errors, and the attitude errors of LSTM–GRU decreased by 72.2%, 69.3%, and 58.4%;
- (2)
- With a limited training dataset, LSTM–GRU outperformed GRU–LSTM; LSTM–GRU had a large training loss, but the LSTM–GRU still showed an improvement compared with the two-layer LSTM and two-layer GRU.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dow, J.M.; Ruth, E.N.; Chris, R. The international GNSS service in a changing landscape of global navigation satellite systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Hewitson, S.; Wang, J. GNSS receiver autonomous integrity monitoring (RAIM) performance analysis. GPS Solut. 2006, 10, 155–170. [Google Scholar] [CrossRef]
- Lashley, M.; Bevly, D.M.; Hung, J.Y. Performance analysis of vector tracking algorithms for weak GPS signals in high dynamics. IEEE J. Sel. Top. Sign. Process. 2009, 3, 661–673. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Bo, Y.; Wang, C.; Tao, W. Performance analysis of GNSS Vector tracking loop based GNSS/CSAC integrated navigation system. J. Aeronaut. Astronaut. Aviat. 2017, 49, 289–297. [Google Scholar]
- Chen, R.; Chen, Y.; Pei, L.; Chen, W.; Liu, J.; Kuusniemi, H.; Takala, J. A DSP-based multi-sensor multi-network positioning platform. In Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 615–621. [Google Scholar]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Zhou, H. The accuracy comparison of three simultaneous localization and mapping (SLAM)-based indoor mapping technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Chen, S.; Chen, Y.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU de-noising method using long short term memory recurrent neural networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef]
- Chiang, K.W.; Huang, Y.W. An intelligent navigator for seamless INS/GPS integrated land vehicle navigation applications. Appl. Soft Comput. 2008, 8, 722–733. [Google Scholar] [CrossRef]
- Chiang, K.W.; Duong, T.T.; Liao, J.K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897. [Google Scholar] [CrossRef]
- Cho, S.Y.; Park, C.G. MEMS based pedestrian navigation system. J. Navig. 2006, 59, 135–153. [Google Scholar] [CrossRef]
- Brown, A.K. GPS/INS uses low-cost MEMS IMU. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 3–10. [Google Scholar] [CrossRef]
- Jiang, C.H.; Chen, S.; Chen, Y.Y.; Bo, Y.M. Research on chip scale atomic clock driven GNSS/SINS deeply coupled navigation system for augmented performance. IET Radar. Sonar Navig. 2018. [Google Scholar] [CrossRef]
- Ning, Y.; Wang, J.; Han, H.; Tan, X.; Liu, T. an optimal radial basis function neural network enhanced adaptive robust Kalman filter for GNSS/INS integrated systems in complex urban areas. Sensors 2018, 18, 3091. [Google Scholar] [CrossRef] [PubMed]
- Niu, X.; Nassar, S.; El-Sheimy, N. An accurate land-vehicle MEMS IMU/GPS navigation system using 3D auxiliary velocity updates. Navigation 2007, 54, 177–188. [Google Scholar] [CrossRef]
- Li, W.; Wang, J. Effective adaptive Kalman filter for MEMS-IMU/magnetometers integrated attitude and heading reference systems. J. Navig. 2013, 66, 99–113. [Google Scholar] [CrossRef]
- Bhatt, D.; Aggarwal, P.; Devabhaktuni, V.; Bhattacharya, P. A novel hybrid fusion algorithm to bridge the period of GPS outages using low-cost INS. Expert Syst. Appl. 2014, 41, 2166–2173. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.Y.; Niu, X.J. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2008, 57, 140–149. [Google Scholar] [CrossRef]
- Allan, D.W. Historicity, strengths, and weaknesses of Allan variances and their general applications. Gyroscopy Navig. 2016, 7, 1–17. [Google Scholar] [CrossRef]
- Radi, A.; Nassar, S.; El-Sheimy, N. Stochastic error modeling of smartphone inertial sensors for navigation in varying dynamic conditions. Gyroscopy Navig. 2018, 9, 76–95. [Google Scholar] [CrossRef]
- Aggarwal, P.; Syed, Z.; Niu, X.X.; EI-Sheimy, N. A standard testing and calibration procedure for low cost MEMS inertial sensors and units. J. Navig. 2008, 61, 323–336. [Google Scholar] [CrossRef]
- Wang, D.; Dong, Y.; Li, Q.; Li, Z.; Wu, J. Using Allan variance to improve stochastic modeling for accurate GNSS/INS integrated navigation. GPS Solut. 2018, 22, 53. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; Wang, S.; Pei, C. Application of improved fast dynamic Allan variance for the characterization of MEMS gyroscope on UAV. J. Sens. 2018. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, C.; Gao, S.; Wang, T.; Lin, T.; Li, X. Application of fast dynamic Allan variance for the characterization of FOGs-Based measurement while drilling. Sensors 2016, 16, 2078. [Google Scholar] [CrossRef] [PubMed]
- Su, W.P.; Hao, Y.S.; Li, Q.C. Arma-akf model of mems gyro rotation data random drift compensation. Appl. Mech. Mater. 2013, 321–324, 549–552. [Google Scholar] [CrossRef]
- Huang, L. Auto regressive moving average (ARMA) modeling method for Gyro random noise using a robust Kalman filter. Sensors 2015, 15, 25277–25286. [Google Scholar] [CrossRef] [PubMed]
- Khashei, M.; Bijari, M. A novel hybridization of artificial neural networks and ARIMA models for time series forecasting. Appl. Soft Comput. 2011, 11, 2664–2675. [Google Scholar] [CrossRef]
- Waegli, A.; Skaloud, J.; Guerrier, S.; Parés, M.E.; Colomina, I. Noise reduction and estimation in multiple micro-electro-mechanical inertial systems. Meas. Sci. Technol. 2010, 21, 156–158. [Google Scholar] [CrossRef]
- Bhatt, D.; Priyanka, A.; Prabir, B.; Vijay, D. An enhanced mems error modeling approach based on nu-support vector regression. Sensors 2012, 12, 9448–9466. [Google Scholar] [CrossRef]
- Xing, H.F.; Hou, Bo.; Lin, Z.H.; Guo, M.F. Modeling and compensation of random drift of MEMS gyroscopes based on least squares support vector machine optimized by chaotic particle swarm optimization. Sensors 2017, 17, 2335. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Bo, Y.; Han, L.; Guo, J.; Feng, Z.; Zhou, H. Performance Analysis of a Deep Simple Recurrent Unit Recurrent Neural Network (SRU-RNN) in MEMS Gyroscope De-Noising. Sensors 2018, 18, 4471. [Google Scholar] [CrossRef]
- Understanding LSTM Networks. Available online: https://colah.github.io/posts/20150–8-Understanding-LSTMs/ (accessed on 27 August 2015).
- Hosseinyalamdary, S. Deep Kalman filter: Simultaneous multi-sensor integration and modelling; A GNSS/IMU case study. Sensors 2018, 18, 1316. [Google Scholar] [CrossRef] [PubMed]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Gated feedback recurrent neural networks. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 2067–2075. [Google Scholar]
- Gers, F.A.; Schraudolph, N.N.; Schmidhuber, J. Learning precise timing with LSTM recurrent networks. J. Mach. Learn. Res. 2002, 3, 115–143. [Google Scholar]
- Ordóñez, F.J.; Roggen, D. Deep convolutional and LSTM recurrent neural networks for multimodal wearable activity recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef] [PubMed]
- MSI3200. Available online: http://www.mtmems.com/product_view.asp?id=28 (accessed on 5 August 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MEMS IMU | Gyroscope | range | 300 °/s |
| Bias stability (1 ) | 10 °/h | ||
| Bias stability (Allan) | 2 °/h | ||
| Angle random walk | 10 °/ | ||
| Accelerometer | range | 15 g | |
| Bias stability (1 ) | 0.5 mg | ||
| Bias stability (Allan) | 0.5 mg | ||
| Power consumption | 1.5 W | ||
| Weight | 250 g | ||
| Size | |||
| Sampling rate | 400 Hz | ||
| X (degree/s) | Y (degree/s) | Z (degree/s) | |
|---|---|---|---|
| Training loss | 0.00132 | 0.00534 | 0.00139 |
| LSTM-RNN | 0.060 | 0.037 | 0.025 |
| Original signals | 0.069 | 0.083 | 0.047 |
| X (degree/s) | Y (degree/s) | Z (degree/s) | |
|---|---|---|---|
| Training loss | 0.00136 | 0.0055 | 0.00142 |
| LSTM-RNN | 0.059 | 0.034 | 0.026 |
| Original signals | 0.069 | 0.083 | 0.047 |
| X (degree/s) | Y (degree/s) | Z (degree/s) | |
|---|---|---|---|
| Training loss | 0.00127 | 0.00469 | 0.00134 |
| LSTM-RNN | 0.060 | 0.035 | 0.0246 |
| Original signals | 0.069 | 0.083 | 0.047 |
| X (degree) | Y (degree) | Z (degree) | |
|---|---|---|---|
| two-layer LSTM | 0.136 | 0.240 | 0.184 |
| two-layer GRU | 0.167 | 0.215 | 0.205 |
| LSTM–GRU | 0.104 | 0.145 | 0.164 |
| Original signals | 0.382 | 0.473 | 0.394 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Chen, Y.; Chen, S.; Bo, Y.; Li, W.; Tian, W.; Guo, J. A Mixed Deep Recurrent Neural Network for MEMS Gyroscope Noise Suppressing. Electronics 2019, 8, 181. https://doi.org/10.3390/electronics8020181
Jiang C, Chen Y, Chen S, Bo Y, Li W, Tian W, Guo J. A Mixed Deep Recurrent Neural Network for MEMS Gyroscope Noise Suppressing. Electronics. 2019; 8(2):181. https://doi.org/10.3390/electronics8020181
Chicago/Turabian StyleJiang, Changhui, Yuwei Chen, Shuai Chen, Yuming Bo, Wei Li, Wenxin Tian, and Jun Guo. 2019. "A Mixed Deep Recurrent Neural Network for MEMS Gyroscope Noise Suppressing" Electronics 8, no. 2: 181. https://doi.org/10.3390/electronics8020181
APA StyleJiang, C., Chen, Y., Chen, S., Bo, Y., Li, W., Tian, W., & Guo, J. (2019). A Mixed Deep Recurrent Neural Network for MEMS Gyroscope Noise Suppressing. Electronics, 8(2), 181. https://doi.org/10.3390/electronics8020181