A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis

Abstract
1. Introduction
2. Materials and Methods
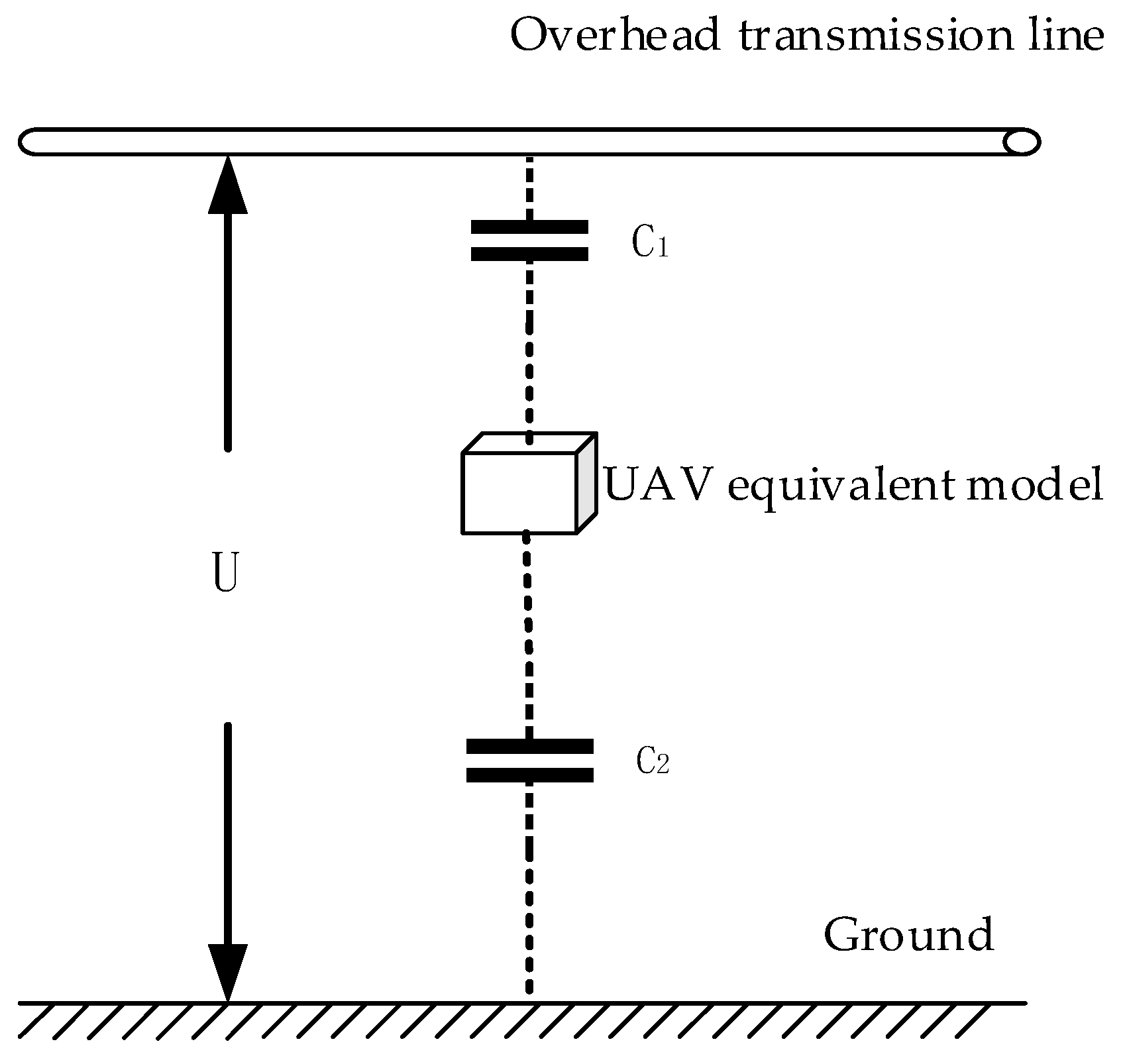
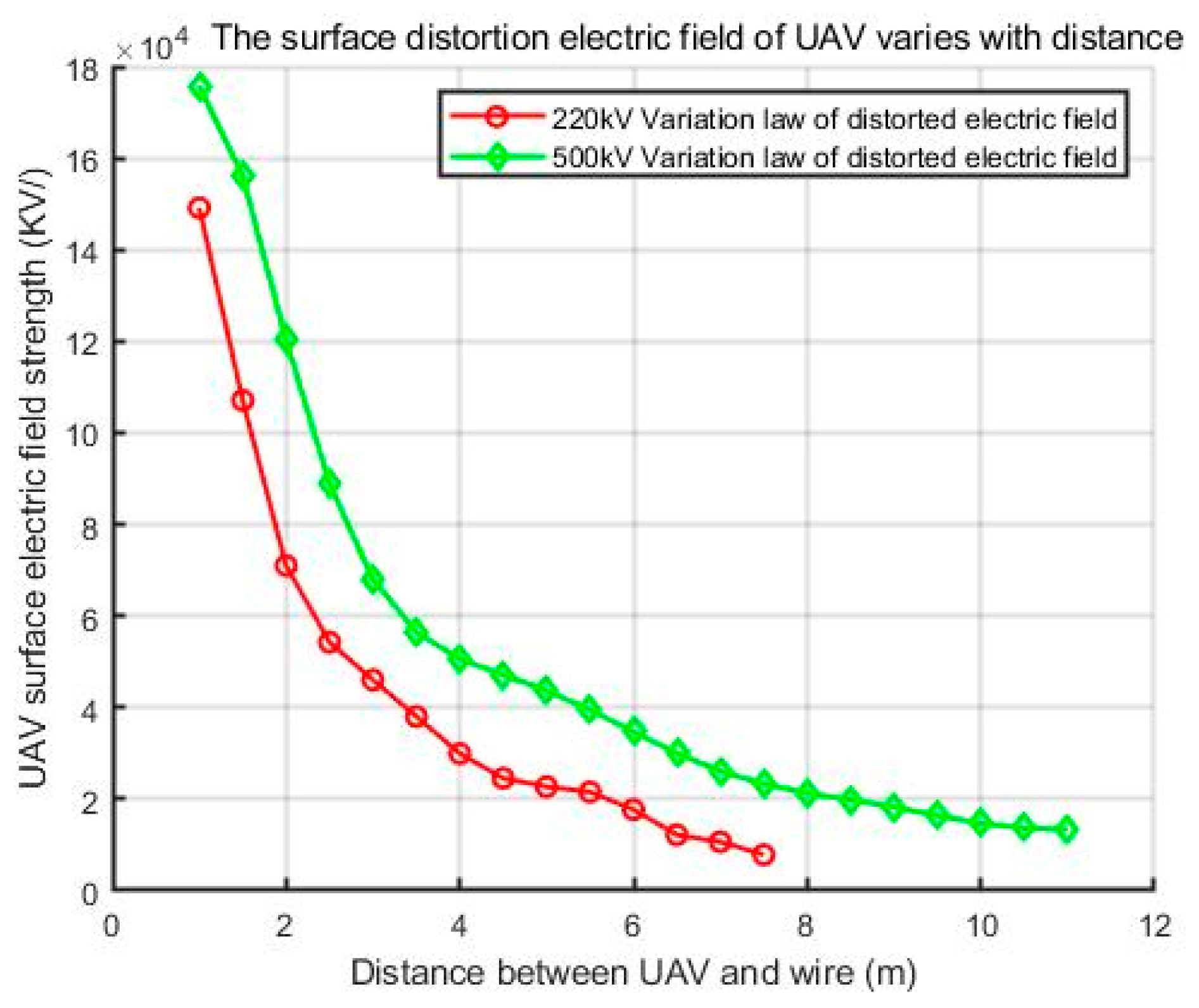
2.1. Analysis of the Influence of Distorted Electric Field on UAV
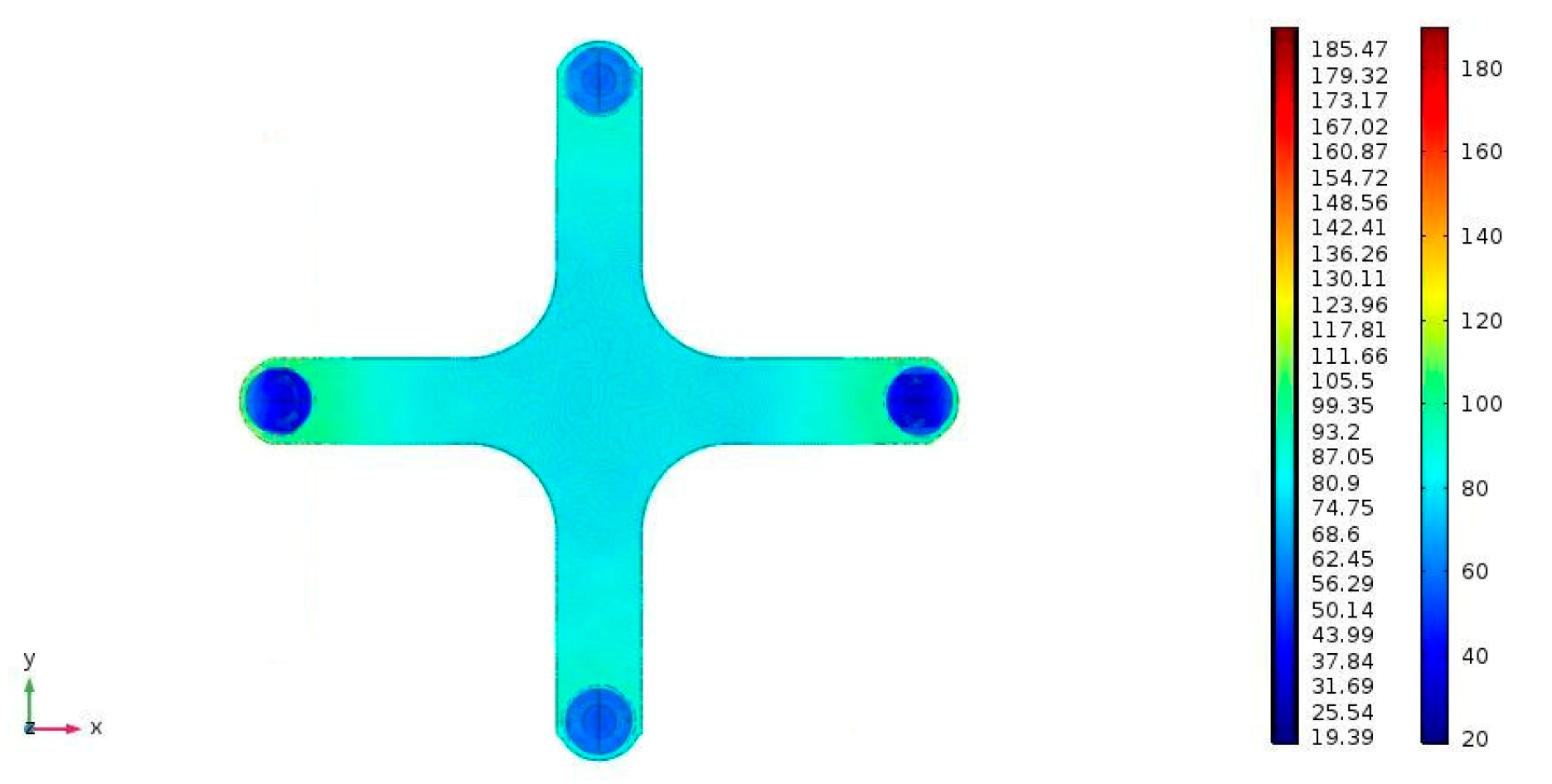
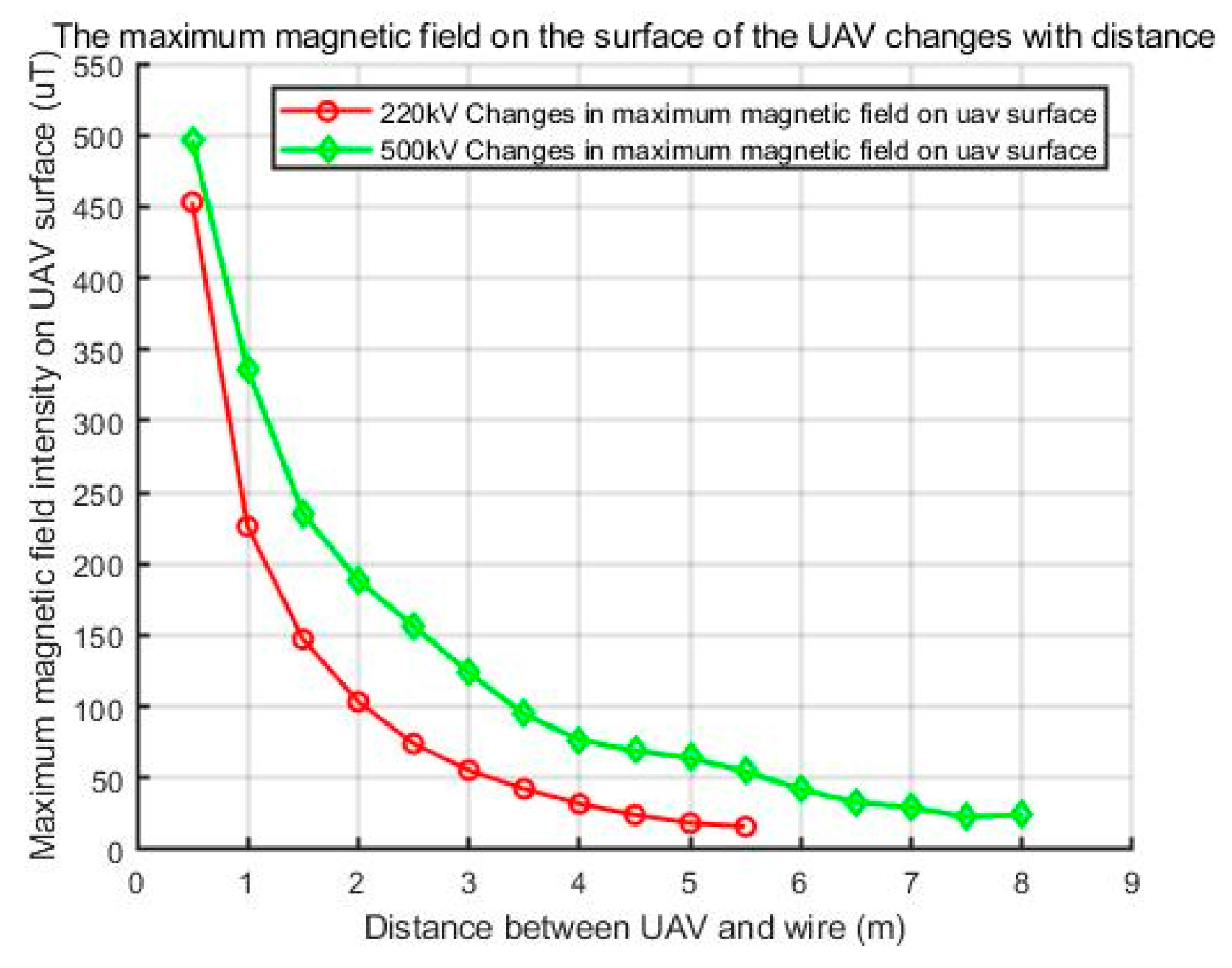
2.2. Analysis of the Influence of Magnetic Field on UAV
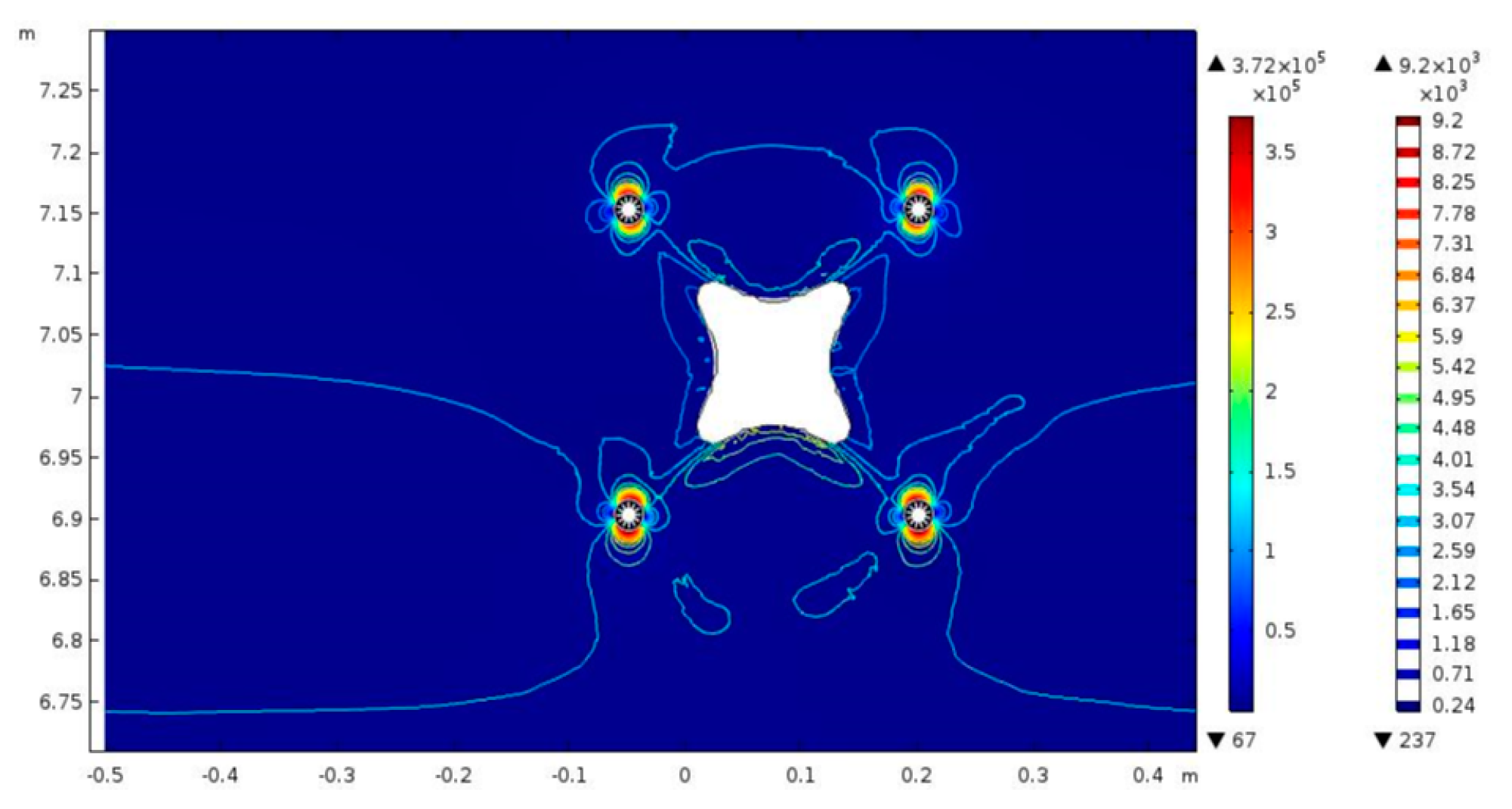
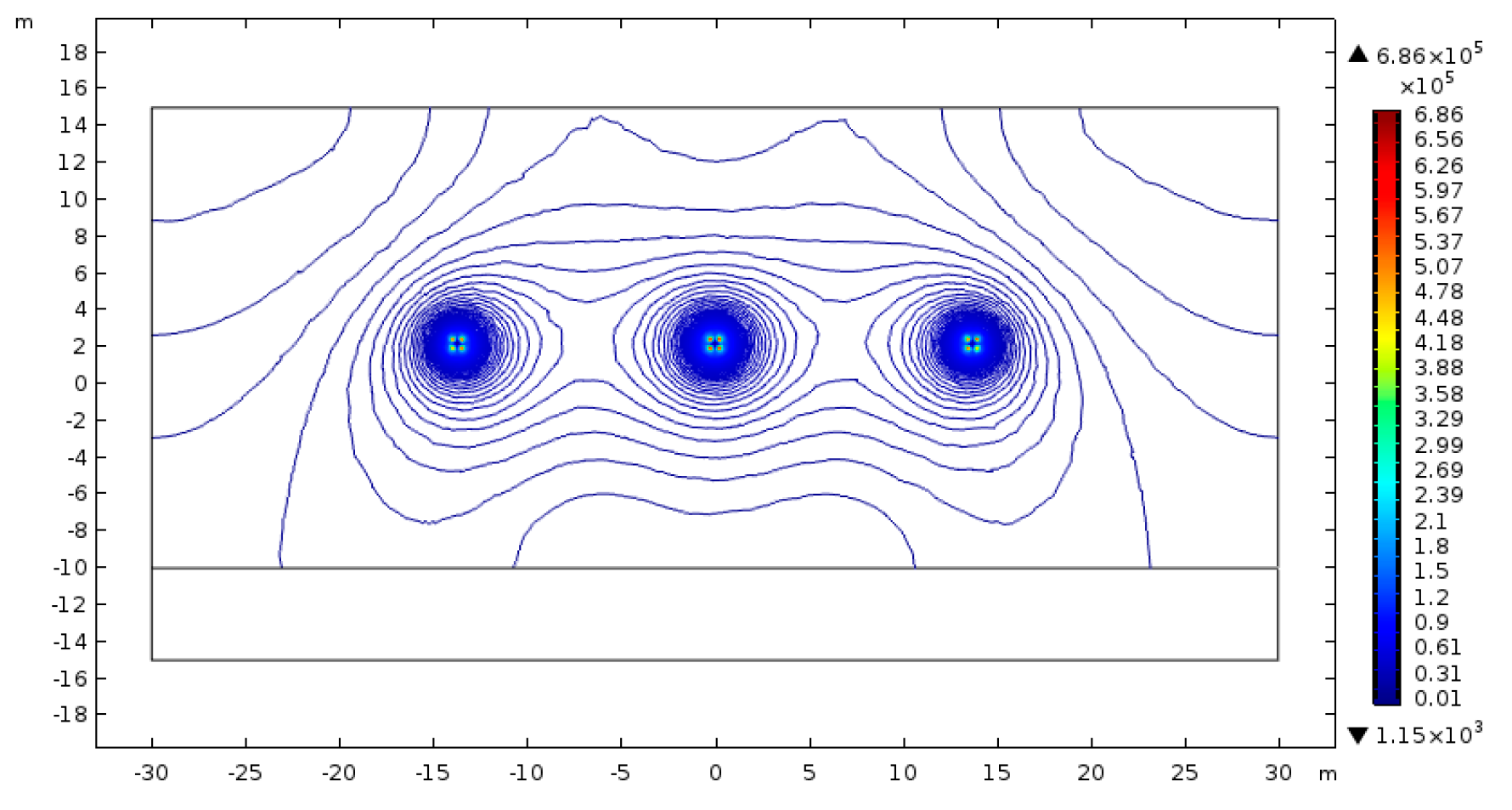
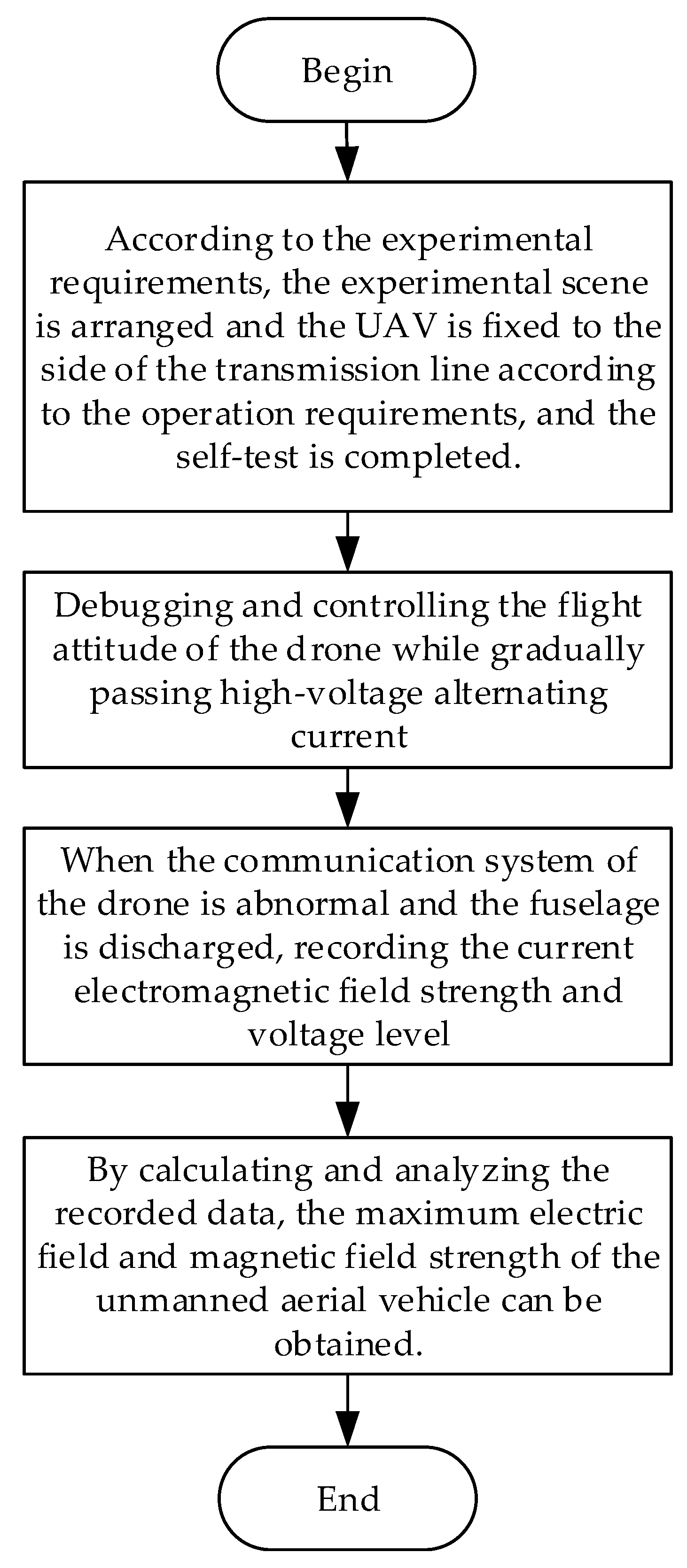
2.3. Electromagnetic Field Experiment Results and Analysis
3. Adaptive Security Threshold Data Fusion Algorithm
3.1. Analysis of the Safe Distance of the UAV Patrol Power Line
3.2. Homogeneous Multi-Source Data Adaptive Weighted Fusion Algorithm
3.3. Evidence-Based Multi-Source Information Fusion Algorithm
4. Results
Data Fusion Algorithm Verification and Analysis
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luque-Vega, L.F.; Castillo-Toledo, B.; Loukianov, A. Power line inspection via an unmanned aerial system based on the quadrotor helicopter. In Proceedings of the MELECON 2014–2014 17th IEEE Mediterranean Electrotechnical Conference, Beirut, Lebanon, 13–16 April 2014. [Google Scholar]
- Lu, J.; Huang, Q.; Mao, X.; Tan, Y.; Zhu, S.; Zhu, Y. Optimized Design of Modular Multilevel DC De-Icer for High Voltage Transmission Lines. Electronics 2018, 7, 204. [Google Scholar] [CrossRef]
- Qayyum, A.; Malik, A.S.; Saad, N.M.; Abdullah, M.F.B.; Jaafar, M.Y.H.; Abdullah, A.R.B.A.; Rasheed, W.; Iqbal, M. Measuring height of high-voltage transmission poles using unmanned aerial vehicle (uav) imagery. Imaging Sci. J. 2017, 65, 1–14. [Google Scholar] [CrossRef]
- Zhou, Y.X.; Liu, R.; Zhang, Y.X.; Zhang, X.; Guo, D.W. Corresponding Relation Between Aging Micrographs and Partial Discharge Properties of Electrical Trees in Silicone Rubber. High Volt. Eng. 2015, 41, 159–166. [Google Scholar]
- Zhang, X.Q.; Su, J.J. UAV Inspection Technology of Overhead Transmission Line; China Electric Power Press: Beijing, China, 2016. [Google Scholar]
- Azevedo, F.; Dias, A.; Almeida, J.; Oliveira, A.; Ferreira, A.; Santos, T.; Martins, A.; Silva, E. LiDAR-Based Real-Time Detection and Modeling of Power Lines for Unmanned Aerial Vehicles. Sensors 2019, 19, 1812. [Google Scholar] [CrossRef] [PubMed]
- Nuriev, M.G.; Gizatullin, Z.M.; Gizatullin, R.M. Physical modeling of electromagnetic interferences in the unmanned aerial vehicle in the case of high-voltage transmission line impact. Russ. Aeronaut. 2017, 60, 292–298. [Google Scholar] [CrossRef]
- Bhola, R.; Krishna, N.H.; Ramesh, K.N. Detection of the power lines in UAV remote sensed images using spectral-spatial methods. J. Environ. Manag. 2017, 206, 1233–1242. [Google Scholar] [CrossRef]
- Qin, X.Y.; Wu, G.P.; Lei, J.; Fan, F.; Ye, X.H.; Mei, Q.J. A Novel Method of Autonomous Inspection for Transmission Line based on Cable Inspection Robot LiDAR Data. Sensors 2018, 18, 596. [Google Scholar] [CrossRef]
- Song, B.; Li, X. Power line detection from optical images. Neurocomputing 2014, 129, 350–361. [Google Scholar] [CrossRef]
- Chen, C.; Peng, X.Y.; Song, S.; Wang, K.; Qian, J.J.; Yang, B.S. Safety Distance Diagnosis of Large Scale Transmission Line Corridor Inspection Based on LiDAR Point Cloud Collected With UAV. Power Syst. Technol. 2017, 41, 2746–2753. [Google Scholar]
- Tian, F.; Wang, Y.; Zhu, L. Power line recognition and tracking method for UAVs inspection. In Proceedings of the 2015 IEEE International Conference on Information and Automation (ICIA), Lijiang, China, 8–10 August 2015. [Google Scholar]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Larrauri, J.I.; Sorrosal, G.; González, M. Automatic system for overhead power line inspection using an Unmanned Aerial Vehicle. In Proceedings of the International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 28–31 May 2013. [Google Scholar]
- Zheng, T.R.; Sun, L.M.; Lou, T.T.; Guo, X.; Liu, Q.H. Determination Method of Safe Flight Area for UAV Inspection for Transmission Line Based on the Electromagnetic Field Calculation. Shandong Electr. Power 2018, 45, 27–30. [Google Scholar]
- Zhang, J.; Wang, S.Y.; Chen, X.; Xu, H.D.; Yu, D.K.; Yang, Z. Obstacle Avoidance for UAV Power Line Inspection Based on Cylindrical Space and Support Vector Machine. Electr. Power 2015, 66, 56–60. [Google Scholar]
- Liu, Z.; Du, Y.; Chen, Y.; Ma, J.G.; Wu, X.D.; Yao, J.S. Simulation and Experiment on the Safety Distance of Typical μ500 kV DC Transmission Lines and Towers for UAV Inspection Gaodianya Jishu. High Volt. Eng. 2019, 45, 426–432. [Google Scholar]
- Shen, J.; Liu, W.D.; Liu, H.B.; Wang, J.; Wu, Y. Safety distances of inspections on AC UHV lines of 1000 kV with a helicopter. Electr. Power 2011, 44, 41–45. [Google Scholar]
- Wu, X.; Wan, B.Q. Electromagnetic Environment of Transmission and Transformation Engineering; China Electric Power Press: Beijing, China, 2009. [Google Scholar]
- Dong, X.C.; Wu, Z.K.; Chen, Z.M.; Qu, F.R.; Li, Y.F.; Liu, G.; Zhu, N.X. Analysis of induction discharge distance between uav and overhead lines. Adv. Technol. Electr. Eng. Energy 2018, 37, P75–P81. [Google Scholar]
- Zhang, X.D.; Hao, R.R.; Liu, S.S. Protection Circuit against Strong Electromagnetic Pulse Interference; Southeast University: Nanjing, China, 2010. [Google Scholar]
- Qiu, Z.B.; Yan, J.J.; Xu, W.J.; Hang, C.P. Hybrid Prediction of the Breakdown Voltages of Short Air Gaps with Typical Electrodes. High Volt. Eng. 2018, 44, 2012–2018. [Google Scholar]
- Peng, X.T.; Qian, J.J.; Wang, K.; Mai, X.M.; Yi, L. Multi-sensor Full-automatic Inspection System for Large Unmanned Helicopter and Its Application in 500 kV Lines. Guangdong Electr. Power 2016, 29, 8–15. [Google Scholar]
- Silva, J.M.; Whitney, B. Evaluation of the Potential for Power Line Carrier (PLC) to Interfere with Use of the Nationwide Differential GPS Network. IEEE Power Eng. Rev. 2002, 22, 62. [Google Scholar]
- Liu, X.F.; Yin, H.; Wu, X. Test and Analysis on Effect of High Voltage Transmission Lines Corona Radio Interference and Scattering to GPS Signal. High Volt. Eng. 2011, 37, 2937–2944. [Google Scholar]
- Guo, L.; Ma, Y.H.; Zhang, X.E. Spatial-temporal estimation algorithm for multisensor data fusion. Syst. Eng. Electron. 2005, 27, 2016–2018. [Google Scholar]
- Zhai, Y.L.; Dai, Y.S. Study of Adaptive Weighted Fusion Estimated Algorithm of Multi-sensor Data. Acta Metrol. Sin. 1998, 19, 69–75. [Google Scholar]
- Yuan, M.; Wan, C.L.; Wei, L.S. Superiority of empirical Bayes estimator of the mean vector in multivariate normal distribution. Sci. China Math. 2016, 59, 1175–1186. [Google Scholar] [CrossRef]
- Shafer, G. A mathematical theory of evidence. Technometrics 1978, 20, 242. [Google Scholar]
- Xinyang, D.; Wen, J.; Zhen, W. Zero-sum polymatrix games with link uncertainty: A Dempster-Shafer theory solution. Appl. Math. Comput. 2019, 340, 101–112. [Google Scholar]
- Shao, L. The Multi-Sensor Data Fusion Technology Research in Animal Building Environmental Monitoring System. Master’s Thesis, Hebei Agriculture University, Baoding, China, 2013. [Google Scholar]
- Wang, J.L.; Zhang, J.Y. Multisensor Target Identification Based on Mass Function of Statistical Evidence and D-S Evidence Theory. Chin. J. Sens. Actuators 2006, 19, 862–864. [Google Scholar]
- Luan, C.J.; Wang, X.F.; Zhang, H.Z.; Jin, S.S.; Li, F. Approach for constructing basic probability assignment for evidence theory in problems of ordered propositions. Comput. Eng. Appl. 2012, 48, 217–221. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditional Attribute | Electric Field Strength (kV/m) | Magnetic Field Strength (µT) | Wind Speed (m/s) | Navigation Error (m) | Inspection Speed (m/s) | UAV Size (m) |
|---|---|---|---|---|---|---|
| Farther away | (0, 50) | (0, 180) | (0, 3) | (0, 1.5) | (3, 5) | (~, 1.5) |
| Suitable distance | (50, 150) | (180, 225) | (3, 8) | (1.5, 3) | (5, 10) | (1.5, 3) |
| Dangerous distance | (150, ~) | (225, ~) | (8, ~) | (3, ~) | (10, ~) | (3, ~) |
| A | B | C | |
|---|---|---|---|
| Electric field strength | 0.752 | 0.203 | 0.045 |
| Magnetic field strength | 0.876 | 0.113 | 0.011 |
| Inspection speed | 0.658 | 0.241 | 0.101 |
| Wind speed | 0.381 | 0.528 | 0.091 |
| Positioning error | 0.274 | 0.456 | 0.27 |
| UAV size | 0.525 | 0.373 | 0.102 |
| Proposition Hypothesis | A | B | C |
|---|---|---|---|
| Fusion result | 0.97 | 0.025 | 0.005 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Ning, Y.; Suo, C. A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis. Electronics 2019, 8, 1467. https://doi.org/10.3390/electronics8121467
Zhang W, Ning Y, Suo C. A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis. Electronics. 2019; 8(12):1467. https://doi.org/10.3390/electronics8121467
Chicago/Turabian StyleZhang, Wenbin, Youhuan Ning, and Chunguang Suo. 2019. "A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis" Electronics 8, no. 12: 1467. https://doi.org/10.3390/electronics8121467
APA StyleZhang, W., Ning, Y., & Suo, C. (2019). A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis. Electronics, 8(12), 1467. https://doi.org/10.3390/electronics8121467