A Method to Identify Lithium Battery Parameters and Estimate SOC Based on Different Temperatures and Driving Conditions

Abstract
:1. Introduction
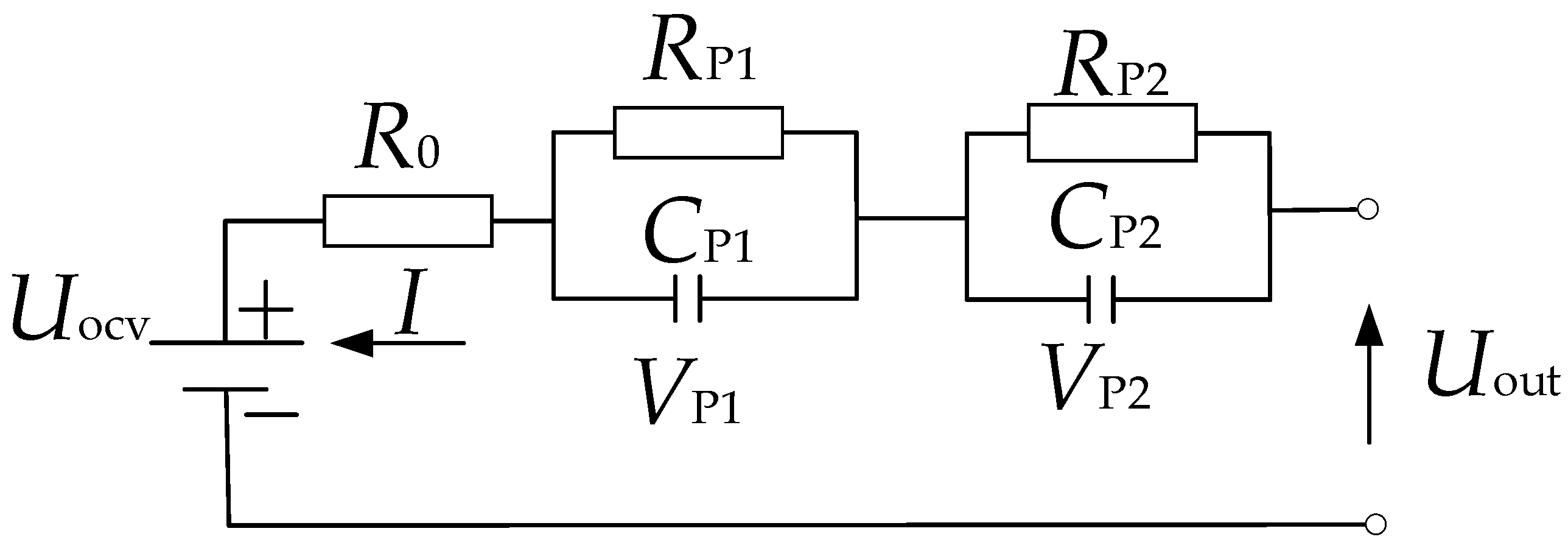
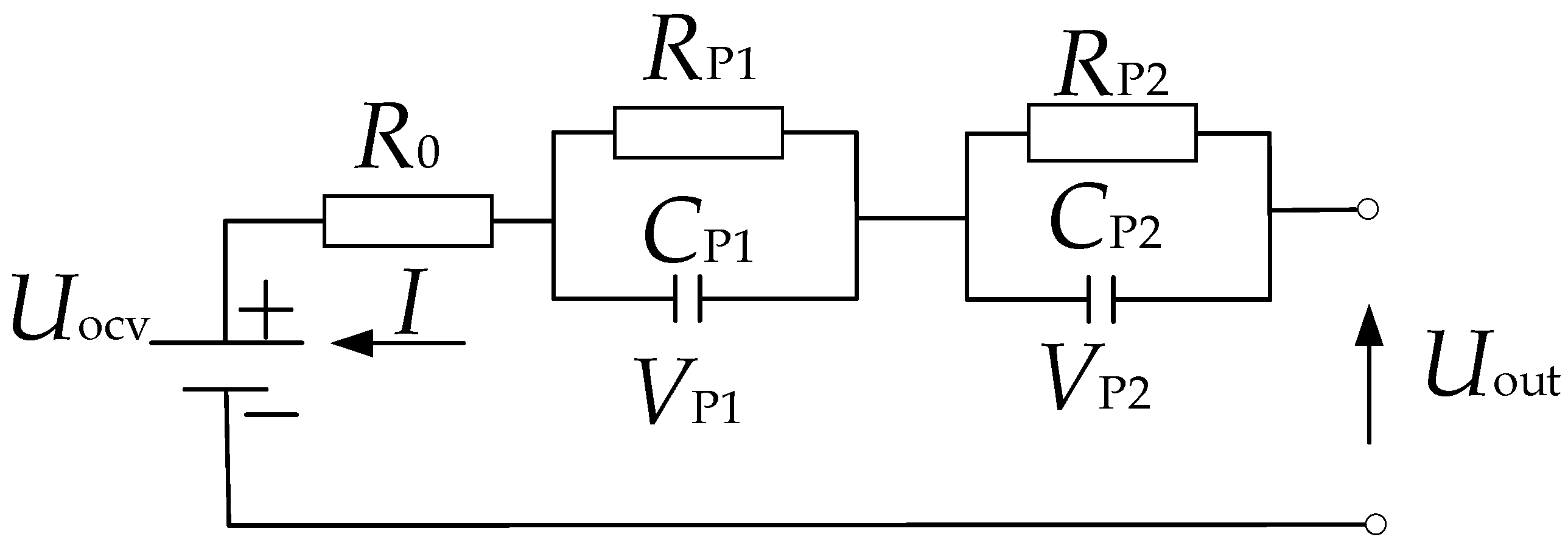
2. Battery of the Equivalent Circuit Model
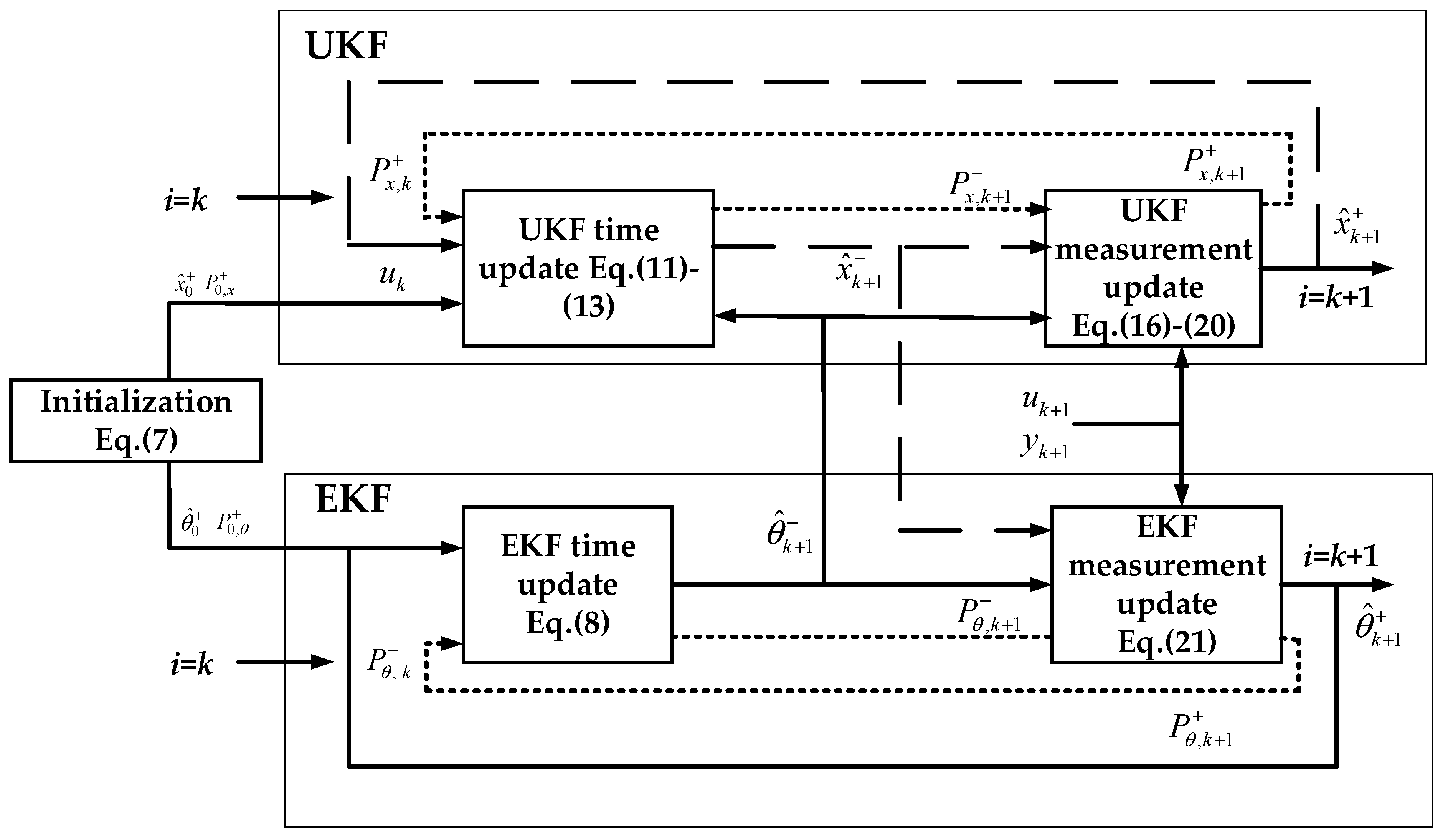
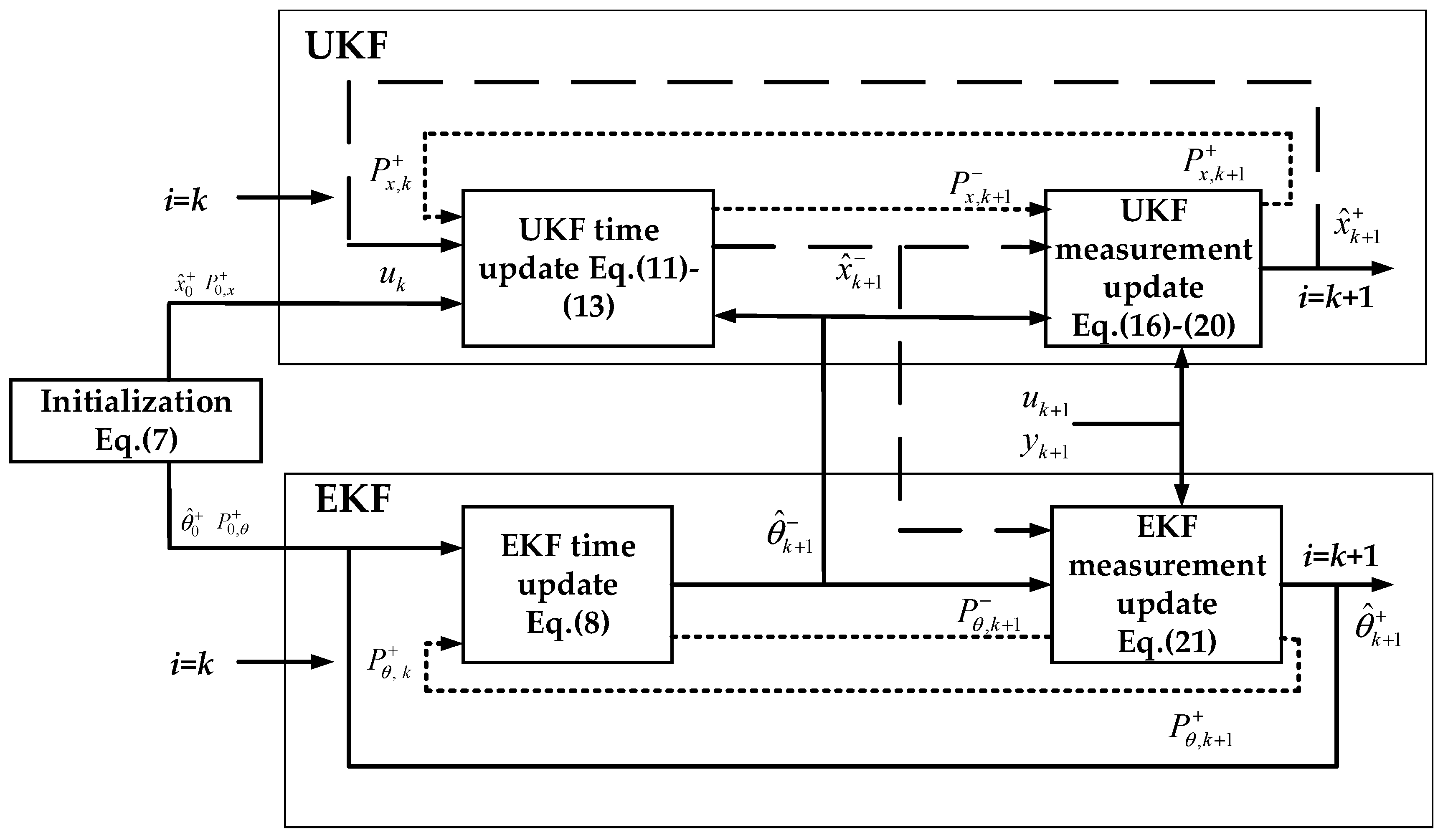
3. Dual Kalman Filter Design
- (1)
- Initialization:
- (2)
- Time update for battery parameters in EKF:
- (3)
- Sigma sampling point and weight calculate for UKF:where n is the state dimension of the battery. Λ = α2(n+k)-n, the function of α is to control the distribution of sampling points, and the parameter k usually guarantees that the variance matrix is semipositive definite. β is the non-negative weight coefficient; in this study, n = 3, α = 0.01, k = 0, β = 2.
- (4)
- State estimation and error covariance time update:
- (5)
- Update measurement with posteriori estimation:
- (6)
- Update measurement covariance:
- (7)
- Calculate UKF gain matrix:
- (8)
- State estimation and error covariance measurement update:
- (9)
- EKF measurement update for battery parameters:
4. Experimental Design
5. Results and Discussion
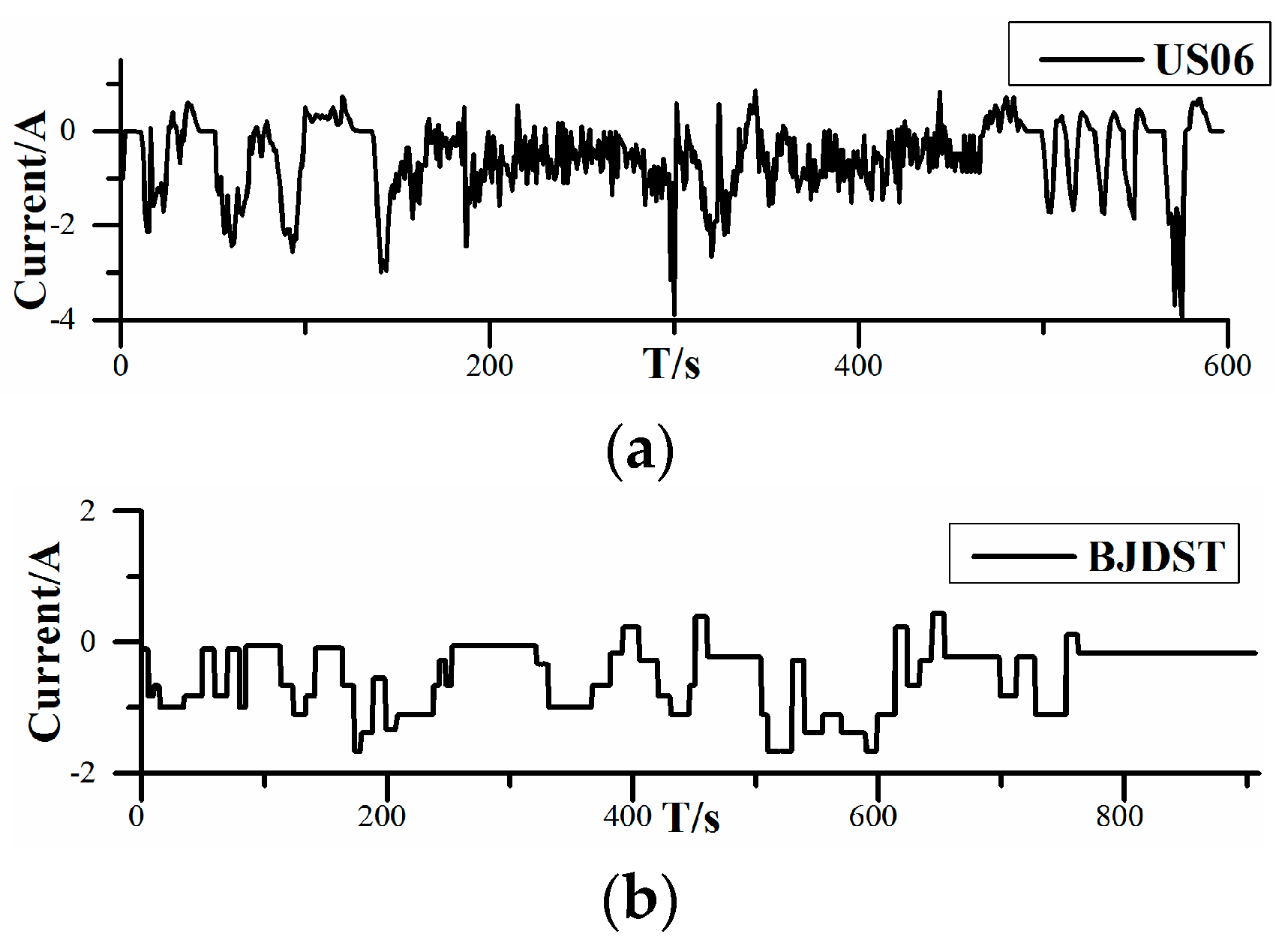
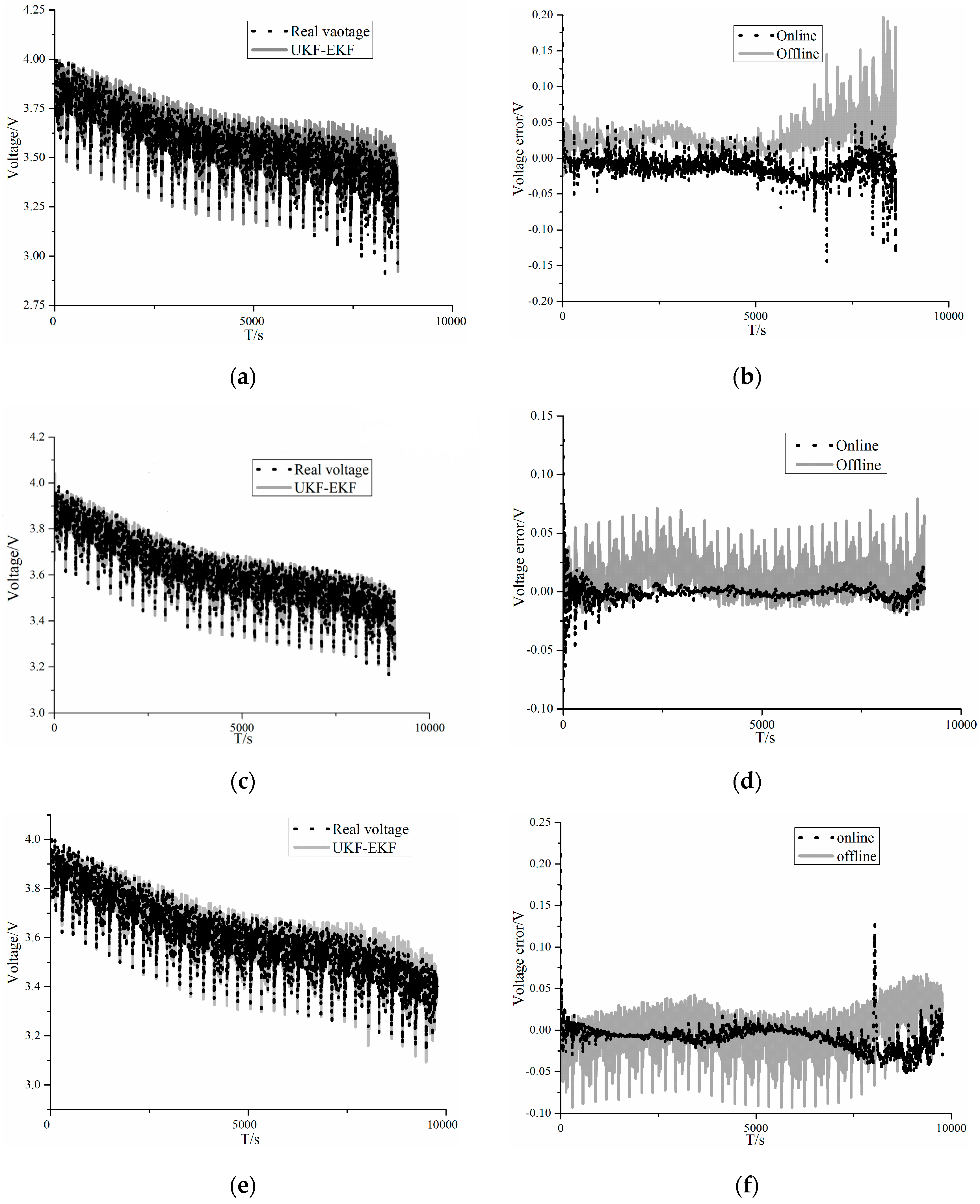
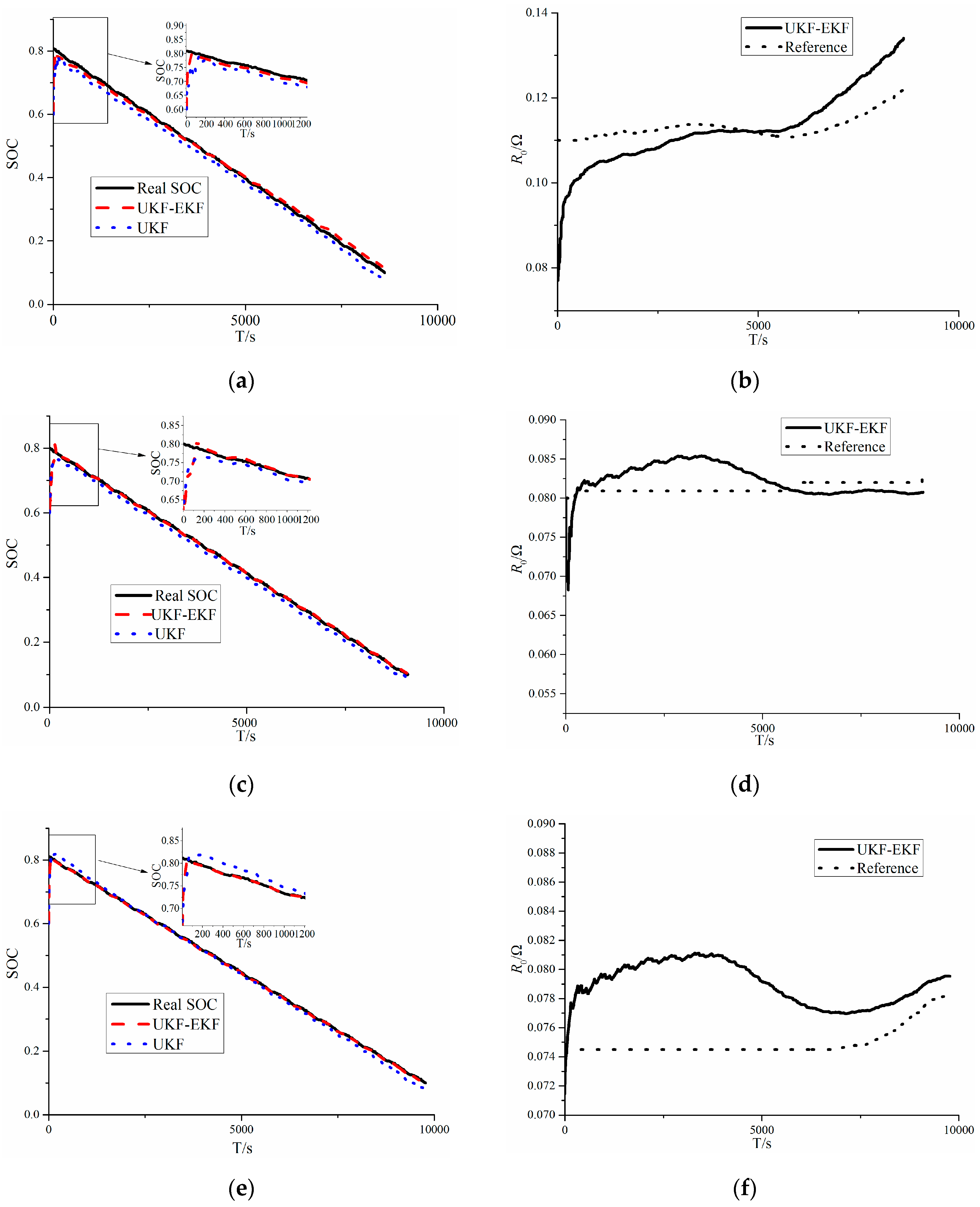
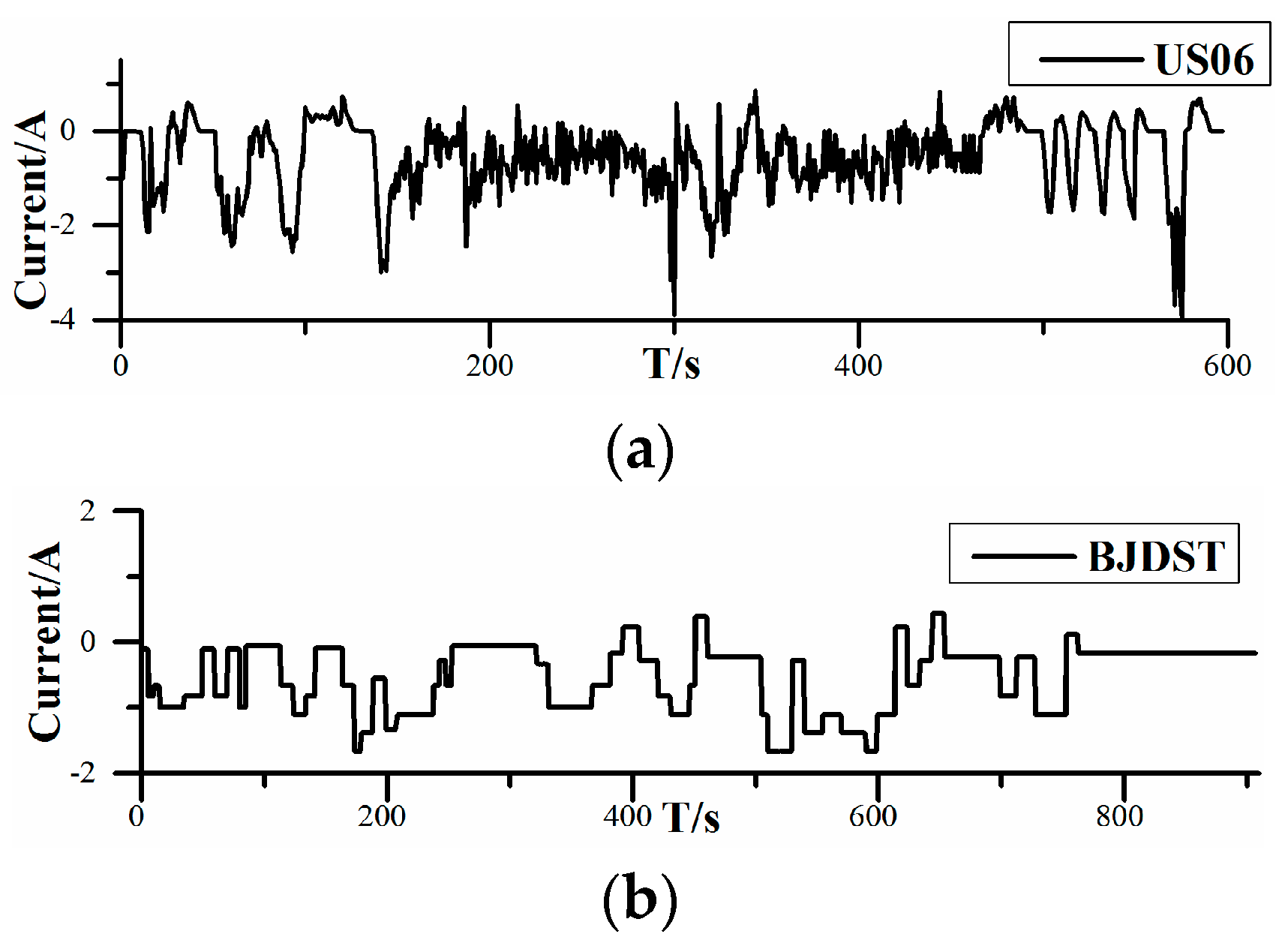
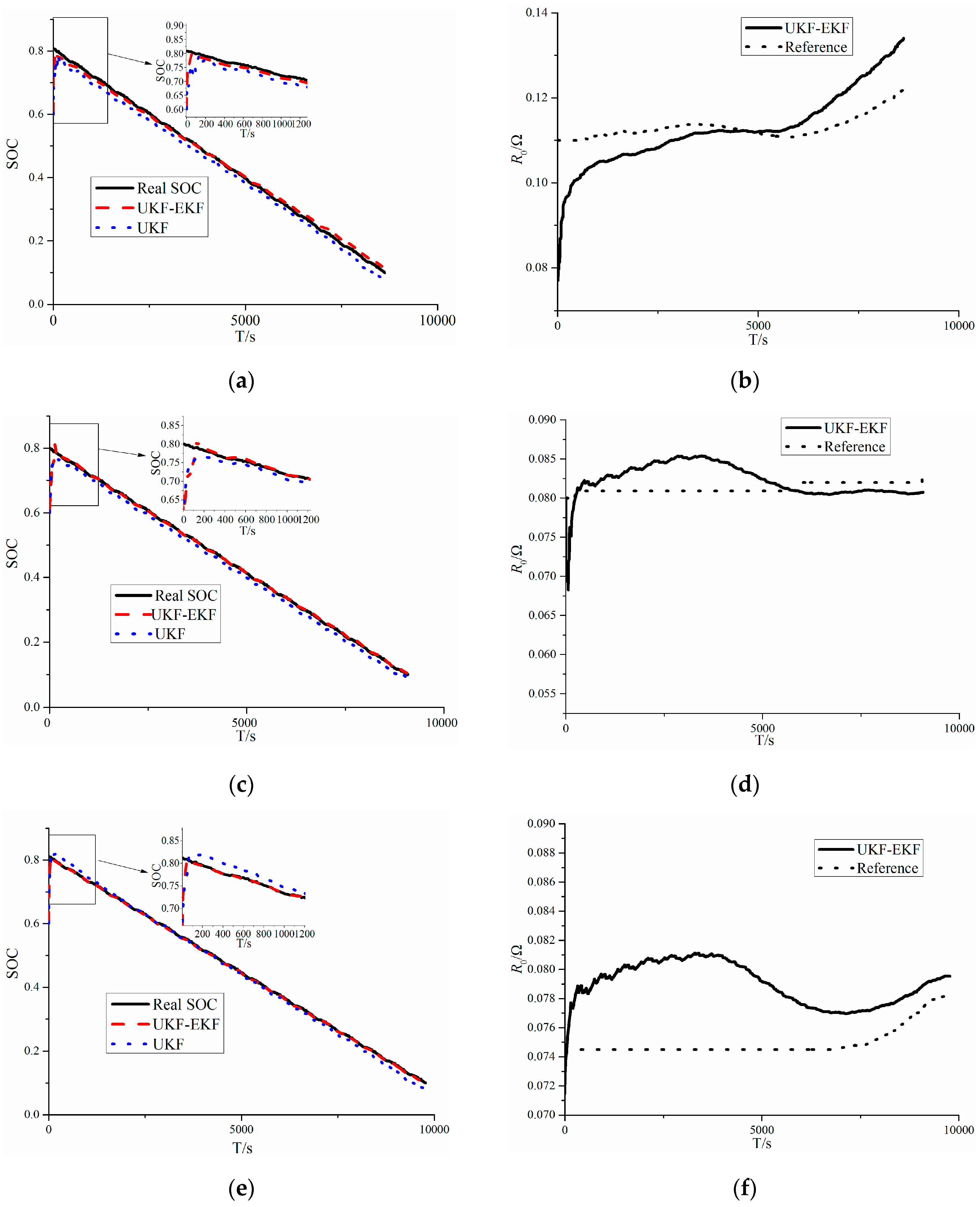
5.1. Results of US06
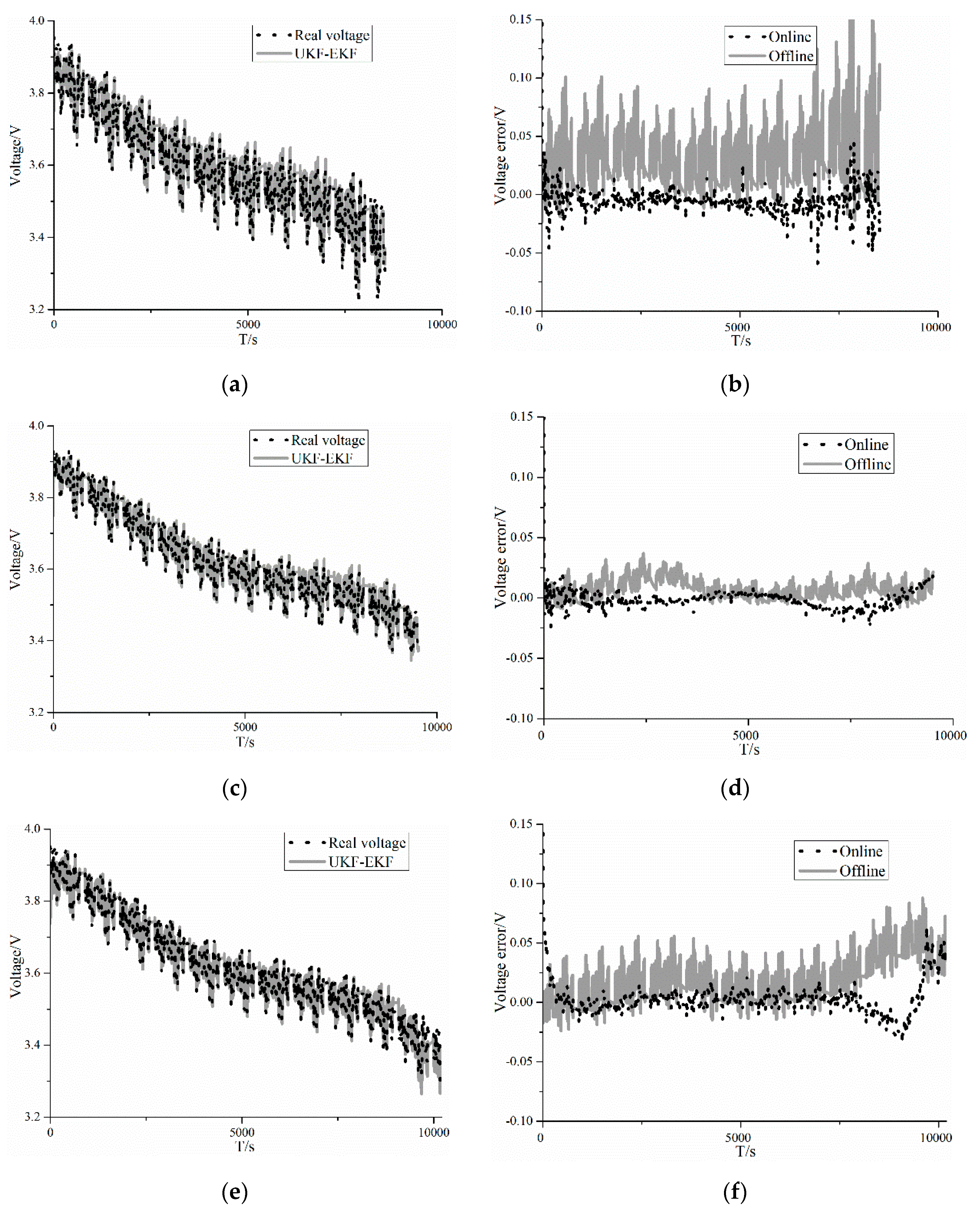
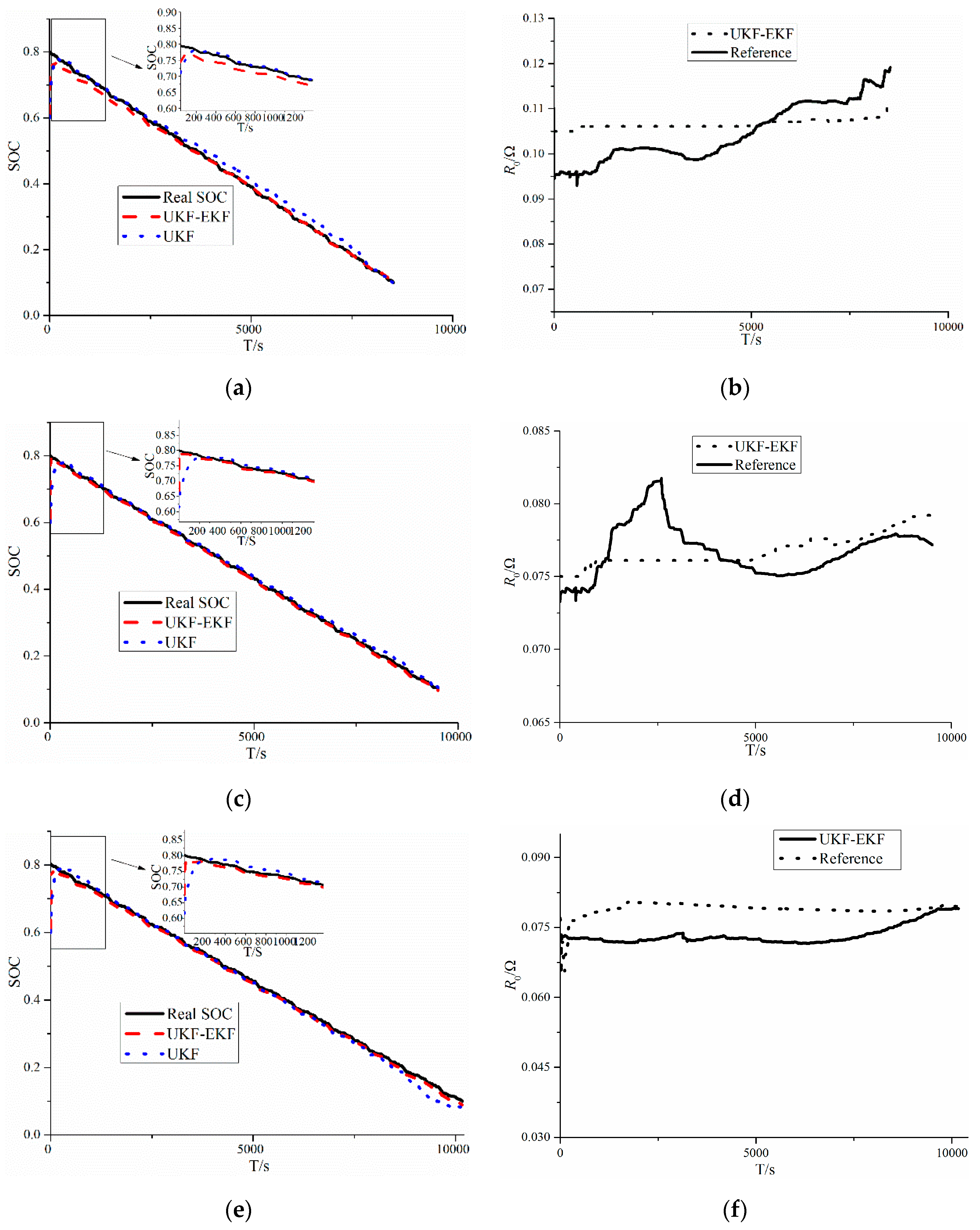
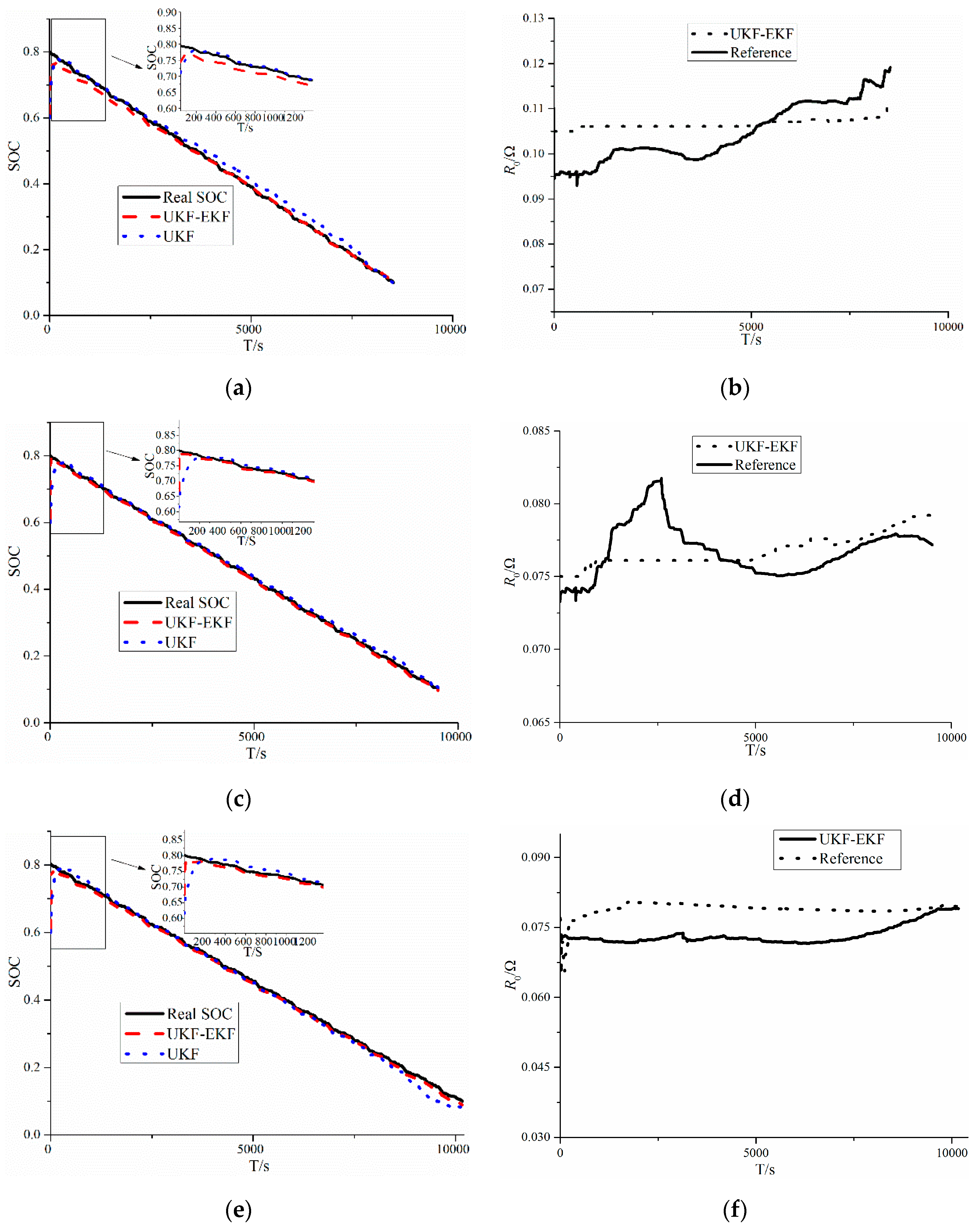
5.2. Results of BJDST
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, X.; Wang, Y.; Yang, D.; Chen, Z.H. An on-line estimation of battery pack parameters and state-of-charge using dual filters based on pack model. Energy 2016, 115, 219–229. [Google Scholar] [CrossRef]
- Ephrem, C.; Kollmeyer, P.J.; Matthias, P.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Int. J. Elec. Power Energy Syst. 2014, 62, 783–791. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y. State of charge estimation for Li-ion battery based on model from extreme learning machine. Control Eng. Pract. 2014, 26, 11–19. [Google Scholar] [CrossRef]
- Cao, W.P.; Ming, Z.; Wang, X.Z.; Cai, S.B. Improved bidirectional extreme learning machine based on enhanced random searsch. Memet. Comput. 2017, 11, 19–26. [Google Scholar] [CrossRef]
- Hu, J.N.; Hu, J.J.; Lin, H.B.; Li, X.P.; Jiang, C.L.; Qiu, X.H.; Li, W.S. State-of-charge estimation for battery management system using optimized support vector machine for regression. J. Power Sources 2014, 269, 682–693. [Google Scholar] [CrossRef]
- Xiong, B.Y.; Zhao, J.Y.; Wei, Z.B.; Skyllas-Kazacos, M. Extended Kalman filter method for state of charge estimation of vanadium redox flow battery using thermal-dependent electrical model. J. Power Sources 2014, 262, 50–61. [Google Scholar] [CrossRef]
- He, H.G.; Xiong, R.; Fan, J.X. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- He, J.G.; Chen, D.; Pan, C.F.; Chen, L.; Wang, S.H. State of charge estimation of power Li-ion batteries using a hybrid estimation algorithm based on UKF. Electrochim. Acta 2016, 21, 101–109. [Google Scholar]
- Peng, J.K.; Luo, J.Y.; He, H.W.; Lu, B. An improved state of charge estimation method based on cubature Kalman filter for lithium-ion batteries. Appl. Energy 2019, 253, 113520. [Google Scholar] [CrossRef]
- Xiong, R.; Gong, X.Z.; Mi, C.C.; Sun, F.C. A robust state-of-charge estimator for multiple types of lithium-ion batteries using adaptive extended Kalman filter. J. Power Sources 2013, 243, 805–816. [Google Scholar] [CrossRef]
- Peng, S.M.; Chen, C.; Shi, H.B.; Yao, Z.L. State of Charge Estimation of Battery Energy Storage Systems Based on Adaptive Unscented Kalman Filter with a Noise Statistics Estimator. IEEE Access 2017, 5, 13202–13212. [Google Scholar] [CrossRef]
- Xia, B.Z.; Wang, H.Q.; Yong, T.; Wang, M.W. State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter. Energies 2015, 8, 5916–5936. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.C.; He, H.W.; Nguyen, T.D. A data-driven adaptive state of charge and power capability joint estimator of lithium-ion polymer battery used in electric vehicles. Energy 2013, 63, 295–308. [Google Scholar] [CrossRef]
- Wei, Z.B.; Zhao, J.Y.; Zou, C.F.; Lim, T.M.; Tseng, K.J. Comparative study of methods for integrated model identification and state of charge estimation of lithium-ion battery. J. Power Sources 2018, 402, 189–197. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE. Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Improved extended Kalman filter for state of charge estimation of battery pack. J. Power Sources 2014, 255, 368–376. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B.; Mekhilef, S. Overview of model-based online state-of-charge estimation using Kalman filter family for lithium-ion batteries. Renew. Sust. Energy Rev. 2019, 113, 109–233. [Google Scholar] [CrossRef]
- Zheng, F.D.; Xing, Y.J.; Jiang, J.C.; Sun, B.X.; Kim, J.H. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries. Appl. Energy 2016, 183, 513–525. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | 18650 |
|---|---|
| Normal Voltage | 3.6 V |
| Normal Capacity | 2 Ah |
| Upper/lower cut-off voltage | 4.2 V/2.5 V |
| operating temperature | 0–55 °C |
| Temperatures | 0 °C | 25 °C | 45 °C | |||
|---|---|---|---|---|---|---|
| UKF–EKF | UKF | UKF–EKF | UKF | UKF–EKF | UKF | |
| SOC (%) | 1.00 | 2.12 | 0.76 | 1.72 | 0.51 | 1.31 |
| Voltage (mV) | 17.6 | 34.1 | 6.2 | 17.4 | 16.9 | 23.3 |
| R0 (mΩ) | 12.1 | - | 5.6 | - | 7.9 | - |
| Temperatures | 0 °C | 25 °C | 45 °C | |||
|---|---|---|---|---|---|---|
| UKF–EKF | UKF | UKF–EKF | UKF | UKF–EKF | UKF | |
| SOC (%) | 0.97 | 1.95 | 0.61 | 1.31 | 0.82 | 1.75 |
| Voltage (mV) | 10.7 | 17.4 | 5.8 | 9.1 | 10.1 | 24.7 |
| R0 (mΩ) | 7.3 | - | 3.3 | - | 6.1 | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; He, F.; Wang, W. A Method to Identify Lithium Battery Parameters and Estimate SOC Based on Different Temperatures and Driving Conditions. Electronics 2019, 8, 1391. https://doi.org/10.3390/electronics8121391
Zheng Y, He F, Wang W. A Method to Identify Lithium Battery Parameters and Estimate SOC Based on Different Temperatures and Driving Conditions. Electronics. 2019; 8(12):1391. https://doi.org/10.3390/electronics8121391
Chicago/Turabian StyleZheng, Yongliang, Feng He, and Wenliang Wang. 2019. "A Method to Identify Lithium Battery Parameters and Estimate SOC Based on Different Temperatures and Driving Conditions" Electronics 8, no. 12: 1391. https://doi.org/10.3390/electronics8121391
APA StyleZheng, Y., He, F., & Wang, W. (2019). A Method to Identify Lithium Battery Parameters and Estimate SOC Based on Different Temperatures and Driving Conditions. Electronics, 8(12), 1391. https://doi.org/10.3390/electronics8121391