Motion Planning of a Second-Order Nonholonomic Chained Form System Based on Holonomy Extraction


Abstract
:1. Introduction
- As a canonical form for nonholonomic systems, the chained form is often used over all kinds of constraints.
- Many studies have been attracted to a feedback control problem related Brockett’s theorem independently of the type of constraints.
- For kinematic nonholonomic systems, there are some control approaches that explicitly use holonomy especially in motion planning; for dynamic or third-order nonholonomic systems, there is no such control approach.
- A specific way to extract holonomy of the second-order chained form system was proposed. Based on holonomy extraction, a motion planning algorithm was constructed.
- The holonomy-based motion planning algorithm was applied to an underactuated manipulator. The usefulness of the proposed algorithm was validated through some simulation results.
- To the best of the author’s knowledge, no control approach that makes explicit use of the holonomy for the second-order chained form system has been previously reported as shown in Table 1.
2. Second-Order Nonholonomic Chained Form System and Its Controllability
3. Motion Planning Based on Holonomy Extraction
3.1. Problem Formulation
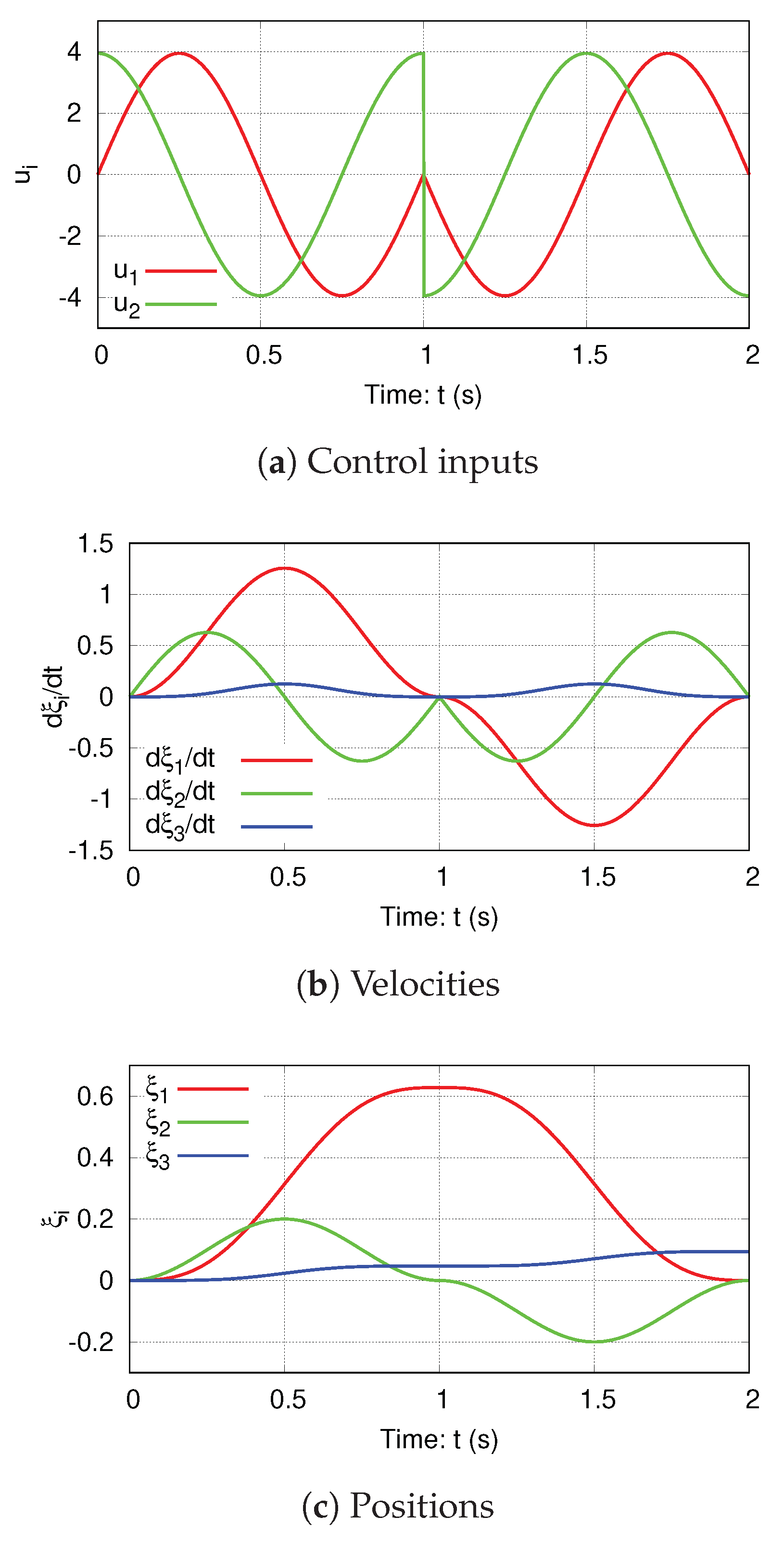
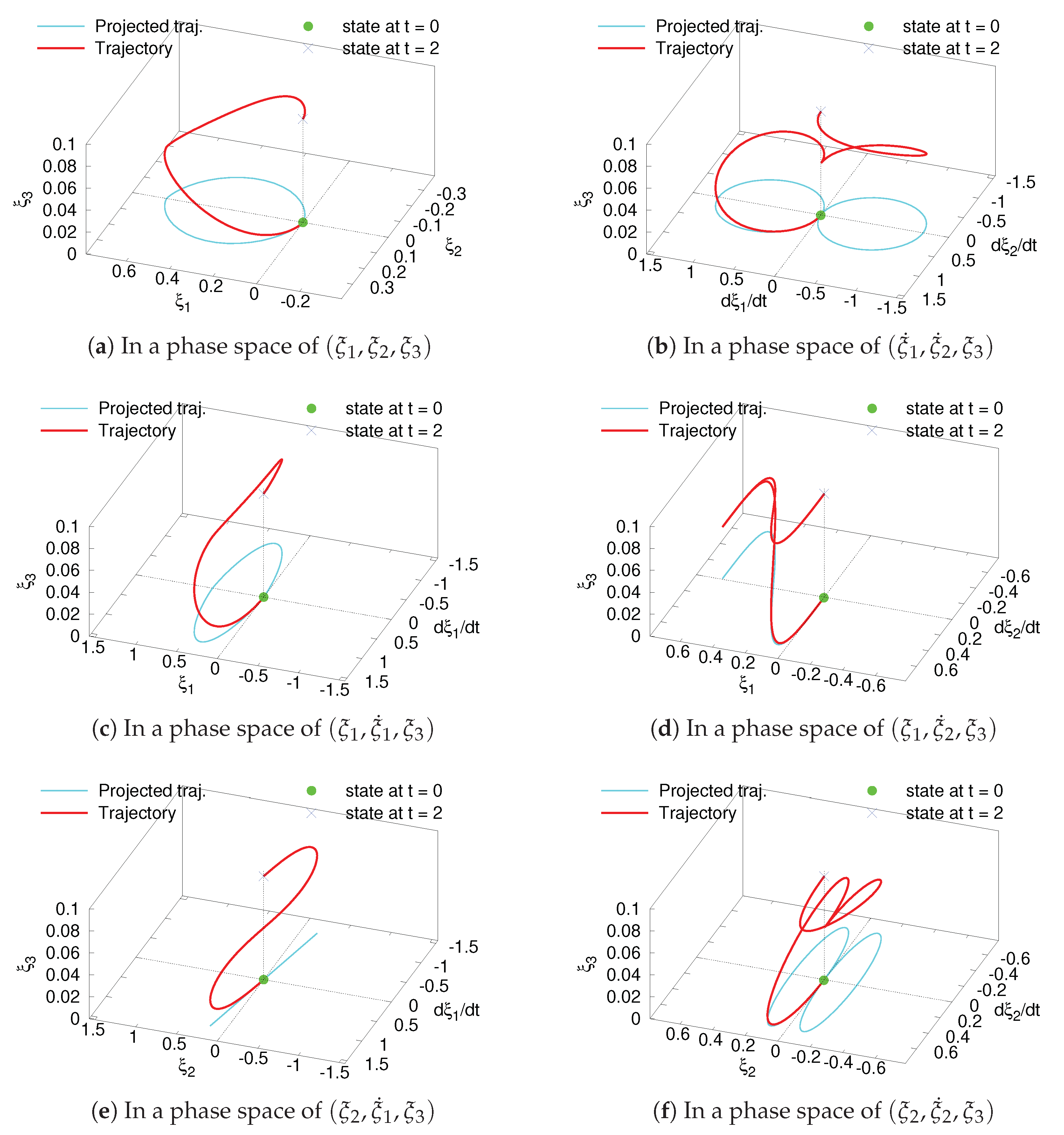
3.2. Holonomy Extraction by Using Sinusoidal Inputs
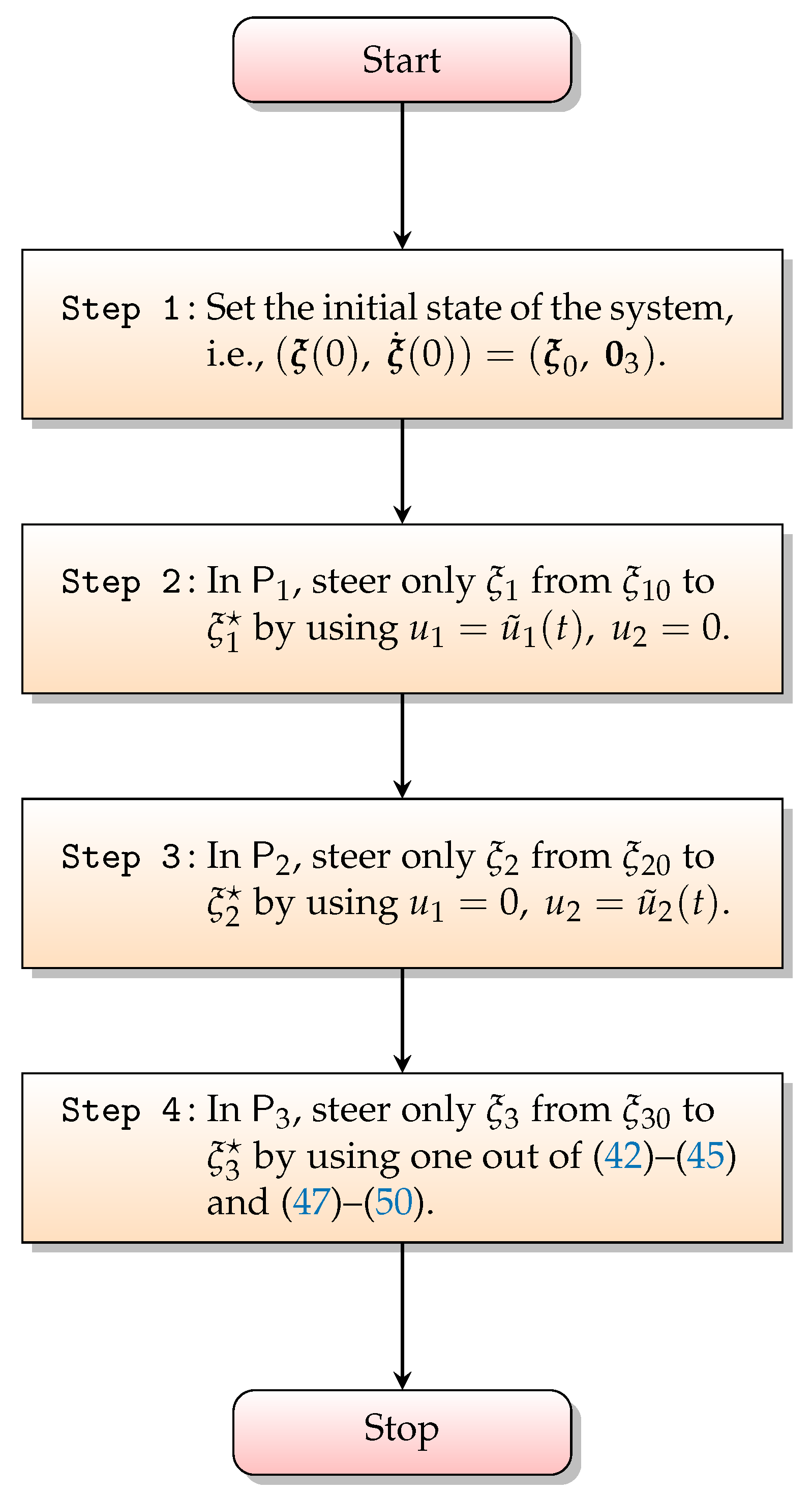
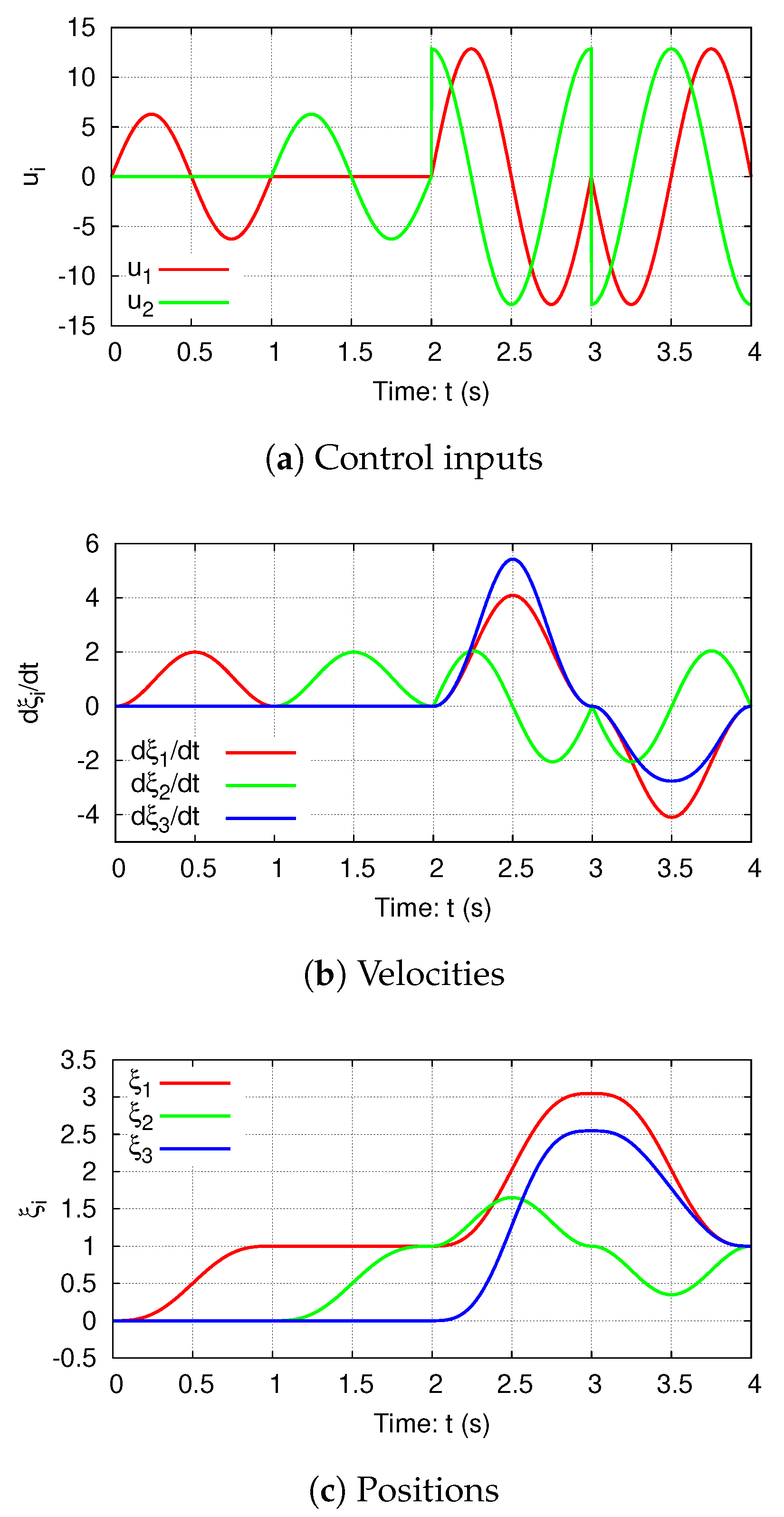
3.3. Holonomy-Based Motion Planning Algorithm
- The entire motion planning consists of three phases: , and . Also, the periods of and are T, whereas that of is .
- At the beginning and end of each phase, the system (1) stops; that is to say, each velocity is zero.
- Let , , be an appropriate sinusoidal function whose period is T.
- Step 1:
- Set the initial state of the system, that is, .
- Step 2:
- In , steer only from to by using .
- Step 3:
- In , steer only from to by using .
- Step 4:
- to realize , and must be
- to realize , and should be assigned as, for example,
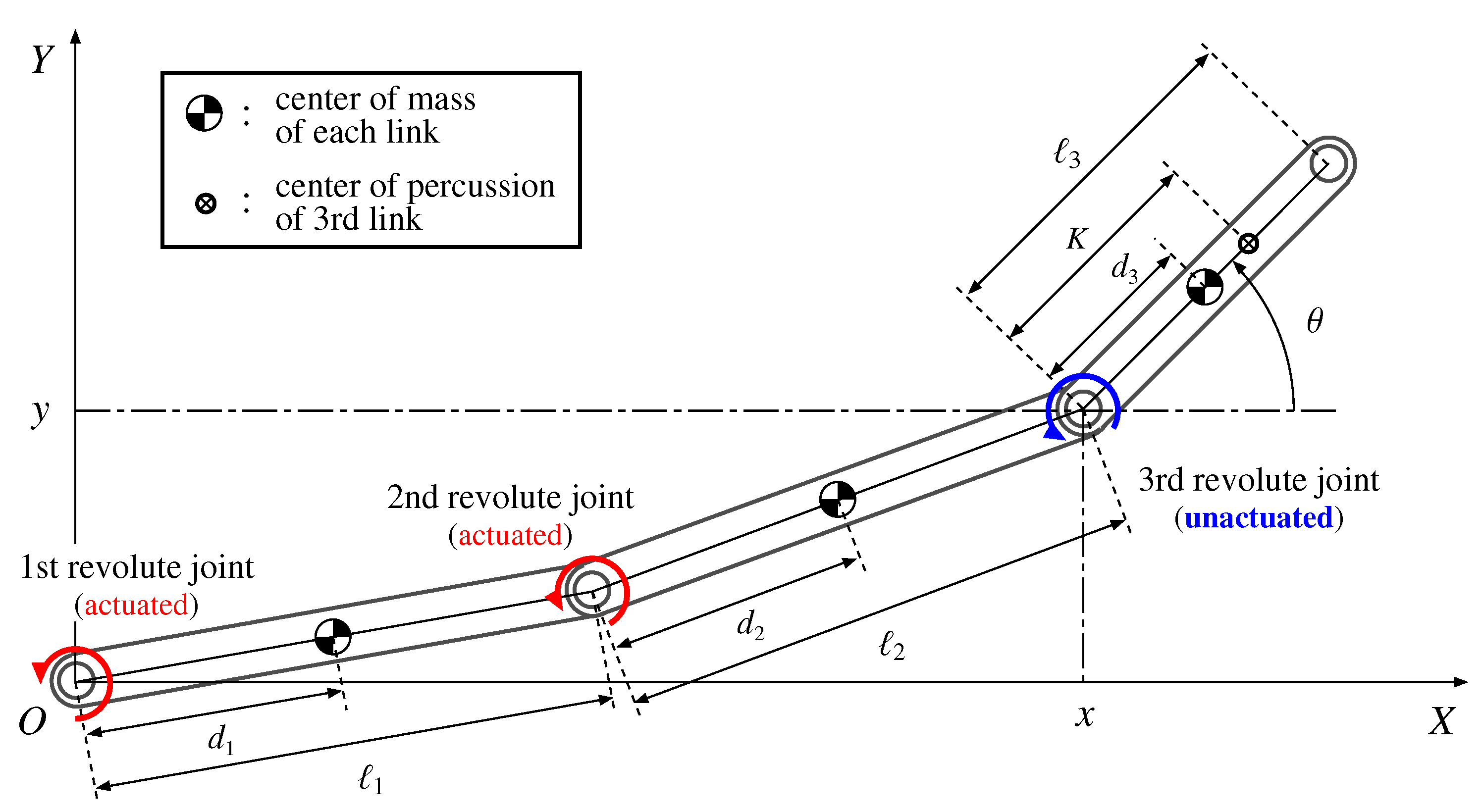
4. Application to Rest-to-Rest Motion of a Three-Joint Manipulator with Passive Third Joint
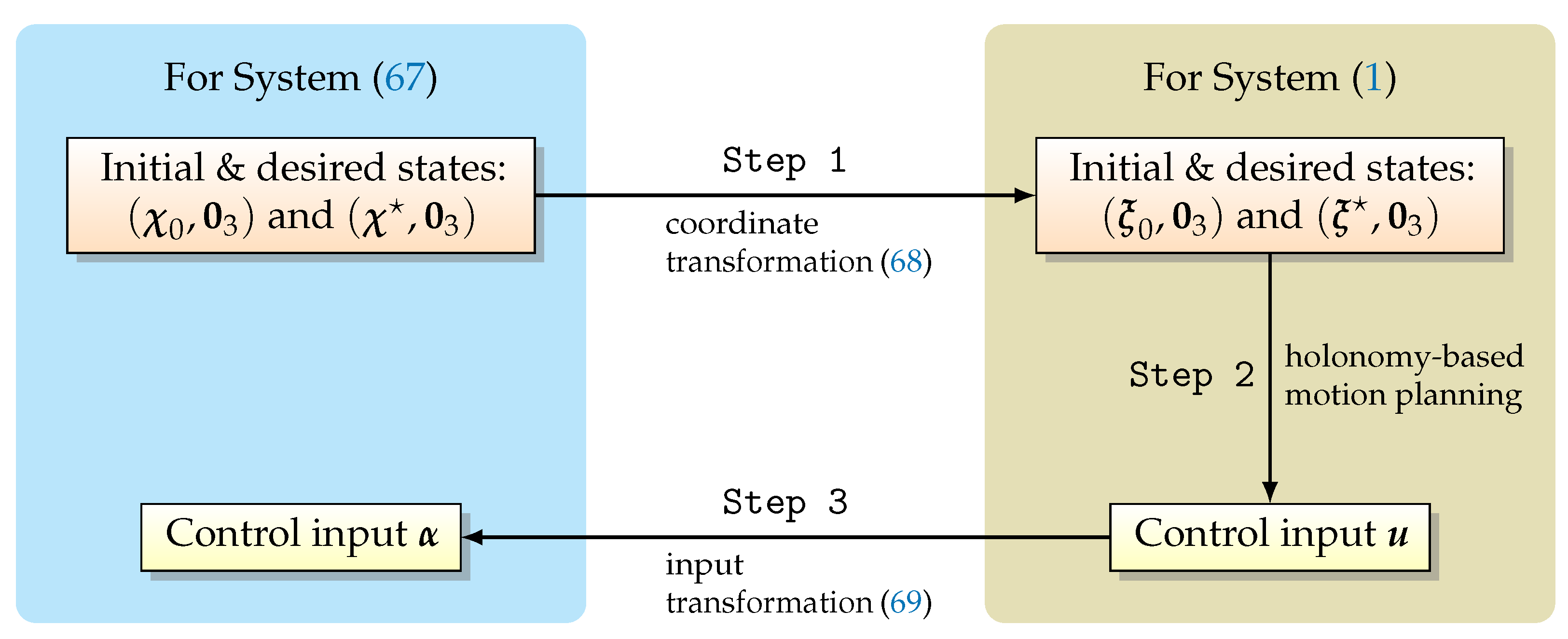
- Step 1:
- For a given initial position and a desired position , compute their corresponding positions and by using (68).
- Step 2:
- Plan motion so as to steer the system (1) from to by using the holonomy-based motion planning algorithm presented in the last section. As a result, the corresponding sinusoidal inputs is obtained.
- Step 3:
- the desired rest-to-rest motion on is achieved;
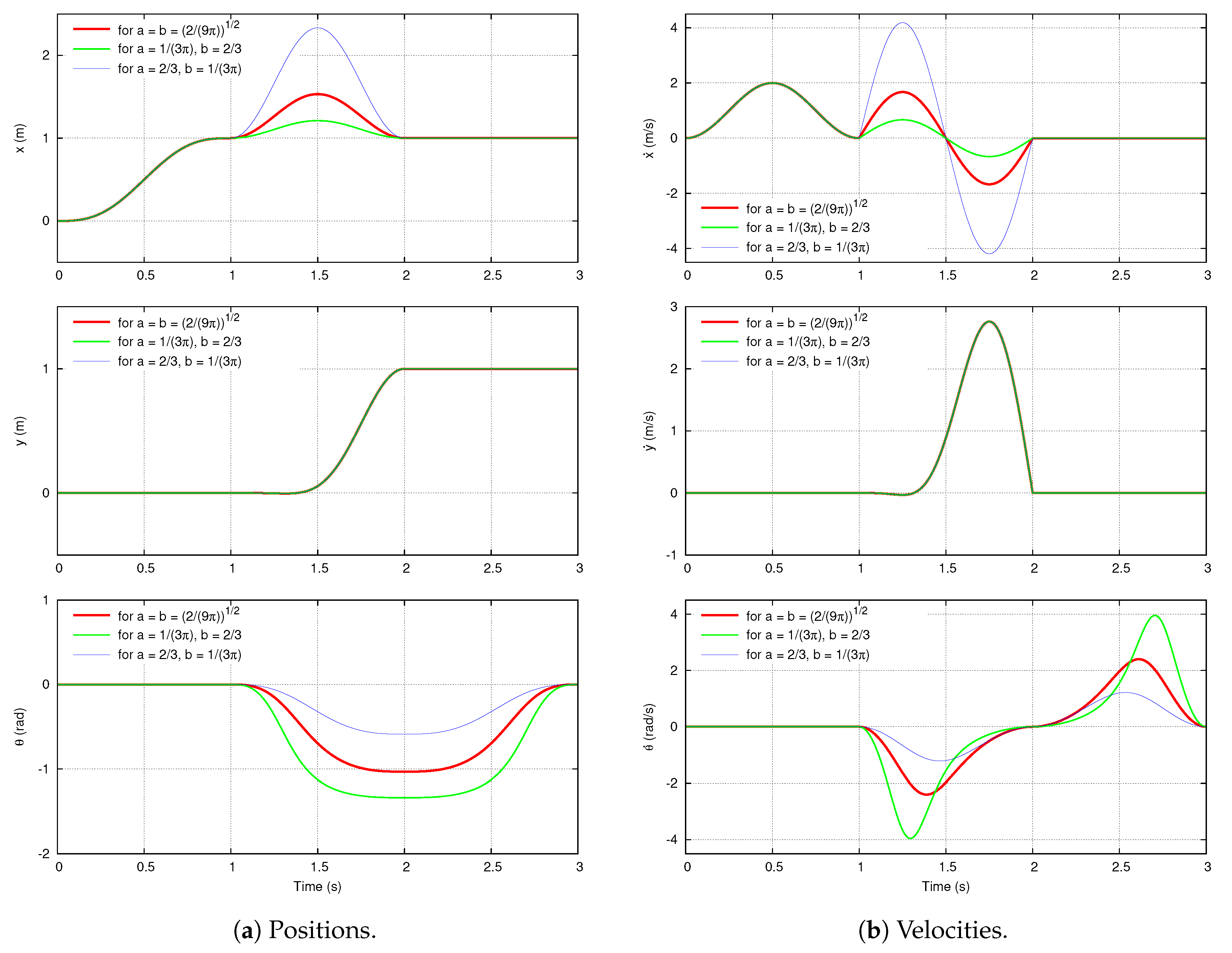
- If is greater than , then, on the basis of the case when , becomes bigger and becomes smaller; that is to say, the third link moves broadly in direction of x-axis while its orientation varies slightly smaller.
- If is less than , then, on the basis of the case when , becomes smaller and becomes bigger; that is to say, the third link moves narrowly in direction of x-axis while its orientation varies slightly larger.
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AISMC | Adaptive Integral Sliding Mode Control |
| AUV | Autonomous Underwater Vehicle |
| BS | BackStepping |
| CF | Chained Form |
| EM | Equilibrium Manifold |
| FB | FeedBack |
| FL | Feedback Linearization/Linearized |
| IDA-PBC | Interconnection and Damping Assignment Passivity-Based Control |
| MP | Motion Planning |
| MPC | Model Predictive Control |
| UAM | UnderActuated Manipulator |
Appendix A. The Details of the Inertia Matrix and the Centrifugal and Coriolis Term in (66)
References
- Murray, R.M.; Li, A.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 1994; ISBN 978-0849379819. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: New York, NY, USA, 2006; ISBN 978-0521862059. [Google Scholar]
- Liu, Y.; Yu, H. A survey of underactuated mechanical systems. IET Control Theory Appl. 2013, 7, 921–935. [Google Scholar] [CrossRef]
- Bloch, A.M. Nonholonomic Mechanics and Control, 2nd ed.; Interdisciplinary Applied Mathematics, 24, Krishnaprasad, P.S., Murray, R.M., Eds.; Springer-Verlag: New York, NY, USA, 2015; ISBN 978-1493930166. [Google Scholar]
- Brockett, R.W. Asymptotic stability and feedback stabilization. In Differential Geometric Control Theory; Brckett, R.W., Millmann, R.S., Sussmann, H.J., Eds.; Birkhauser Verlag: Basel, Switzerland, 1983; pp. 181–191. ISBN 978-0817630911. [Google Scholar]
- Ishikawa, M.; Minami, Y.; Sugie, T. Development and control experiment of the trident snake robot. IEEE/ASME Trans. Mechatron. 2010, 15, 9–16. [Google Scholar] [CrossRef]
- Oriolo, G.; Nakamura, Y. Free-joint manipulators: motion control under second-order nonholonomic constraints. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems (IROS’91), Osaka, Japan, 3–5 November 1991; pp. 1248–1253. [Google Scholar] [CrossRef]
- Imura, J.; Kobayashi, K.; Yoshikawa, T. Nonholonomic control of 3 link planar manipulator with a free joint. In Proceedings of the 35th IEEE Conference on Decision and Control (CDC’96), Kobe, Japan, 13 December 1996; pp. 1435–1436. [Google Scholar] [CrossRef]
- Yoshikawa, T.; Kobayashi, K.; Watanabe, T. Design of a desirable trajectory and convergent control for 3-D. O.F manipulator with a nonholonomic constraint. In Proceedings of the 2000 IEEE International Conference on Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; pp. 1805–1810. [Google Scholar] [CrossRef]
- Arai, H.; Tanie, K.; Shiroma, N. Nonholonomic control of a three-DOF planar underactuated manipulator. IEEE Trans. Robot. Autom. 1998, 14, 681–695. [Google Scholar] [CrossRef]
- Wichlund, K.Y.; Sørdalen, O.J.; Egeland, O. Control of vehicles with second-order nonholonomic constraints: Underactuated vehicles. In Proceedings of the third European Control Conference (ECC’95), Rome, Italy, 5–8 September 1995; Volume 3, pp. 2371–2376. [Google Scholar]
- Laiou, M.-C.; Astolfi, A. Local transformations to generalized chained forms. In Proceedings of the 16th International Symposium on Mathematical Theory of Networks and Systems (MTNS’04), Leuven, Belgium, 5–9 July 2004. [Google Scholar]
- Zain, Z.; Watanabe, K.; Izumi, K.; Nagai, I. Stabilization of an underactuated X4-AUV using a discontinuous control law. Indian J. Geo-Marine Sci. 2012, 41, 589–598. [Google Scholar]
- Reyhanoglu, M.; McClamroch, N.H.; Bloch, A.M. Motion planning for nonholonomic dynamic systems. In Nonholonomic Motion Planning; Li, Z., Canny, J.F., Eds.; Kluwer Academic Publishers: Norwell, MA, USA, 1993; pp. 201–234. ISBN 978-0792392750. [Google Scholar] [CrossRef]
- Leonard, N.E.; Krishnaprasad, P.S. Motion control of drift-free, left-invariant systems on Lie groups. IEEE Trans. Autom. Control 1995, 40, 1539–1554. [Google Scholar] [CrossRef]
- McClamroch, H.; Reyhanoglu, M.; Rehan, M. Knife-edge motion on a surface as a nonholonomic control problem. IEEE Control Syst. Letters 2017, 1, 26–31. [Google Scholar] [CrossRef]
- Rehan, M.; Reyhanoglu, M. Control of rolling disk motion on an arbitrary. IEEE Control Syst. Lett. 2018, 2, 357–362. [Google Scholar] [CrossRef]
- Ishikawa, M. Switched feedback control for a class of first-order nonholonomic driftless systems. IFAC Proc. Volumes 2008, 41, 4761–4766. [Google Scholar] [CrossRef]
- Ishikawa, M. Finite-time control of cross-chained nonholonomic systems by switched state feedback. In Proceedings of the 47th IEEE Conference on Decision and Control (CDC’08), Cancun, Mexico, 9–11 December 2008; pp. 304–309. [Google Scholar] [CrossRef]
- Murray, R.M.; Sastry, S.S. Nonholonomic motion planning: Steering using sinusoids. IEEE Trans. Autom. Control 1993, 38, 700–716. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Nonlinear Control of Underactuated Mechanical Systems with Application to Robotics and Aerospace Vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Tian, Y.P.; Cao, K.C. Tracking of nonholonomic nonholonomic chained-form systems without persistent excitation. IFAC Proc. Volumes 2007, 40, 515–520. [Google Scholar] [CrossRef]
- Sarfraz, M. Stabilization of Perturbed Nonholonomic Systems in Chained Form. Ph.D. Thesis, Capital University of Science and Technology, Islamabad, Pakistan, 2018. [Google Scholar]
- van Steen, J.; Reyhanoglu, M. Trajectory tracking control of a rolling disk on a smooth manifold. In Proceedings of the 12th Asian Control Conference (ASCC’19), Kitakyushu, Japan, 9–12 June 2019; pp. 43–48. [Google Scholar]
- Ge, S.S.; Sun, Z.; Lee, T.H.; Spong, M.W. Feedback linearization and stabilization of second-order non-holonomic chained systems. Int. J. Control 2001, 74, 1383–1392. [Google Scholar] [CrossRef]
- De Luca, A.; Oriolo, G. Trajectory planning and control for planar robots with passive last joint. Int. J. Robot. Res. 2002, 21, 575–590. [Google Scholar] [CrossRef]
- Aneke, N.P.I.; Nijmeijer, H.; de Jager, A.G. Tracking control of second-order chained form systems by cascaded backstepping. Int. J. Robust and Nonlinear Control 2003, 13, 95–115. [Google Scholar] [CrossRef]
- Aneke, N.P.I. Control of Underactuated Mechanical Systems. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2003. [Google Scholar]
- Ito, M.; Toda, N. Control for a three-joint underactuated planar manipulator: Interconnection and damping assignment passivity-based control approach. In Lecture Notes in Control and Information Science (LNCIS); Kozłowski, K., Ed.; Springer: London, UK, 2007; Volume 360, pp. 109–118. ISBN l978-1-84628-973-6. [Google Scholar] [CrossRef]
- Ma, B.L.; Tso, S.K. Unified controller for both trajectory tracking and point regulation of second-order nonholonomic chained systems. Robot. Autonomous Syst. 2008, 56, 317–323. [Google Scholar] [CrossRef]
- Hably, A.; Marchand, N. Bounded control of a general extended chained form systems. In Proceedings of the 53rd IEEE Conference on Decision and Control (CDC’14), Los Angeles, CA, USA, 15–17 December 2014; pp. 6342–6347. [Google Scholar] [CrossRef]
- He, G.; Zhang, C.; Sun, W.; Geng, Z. Stabilizing the second-order nonholonomic systems with chained form by finite-time stabilizing controllers. Robotica 2016, 34, 2344–2367. [Google Scholar] [CrossRef]
- Ito, M. Holonomy-based motion planning of a second-order chained form system by using sinusoidal functions. In Proceedings of the 10th International Workshop on Robot Motion and Control (RoMoCo’15), Poznan, Poland, 6–8 July 2015; pp. 283–287. [Google Scholar] [CrossRef]
- Ito, M. Holonomy-based control of a three-joint underactuated manipulator. In Proceedings of the 11th International Workshop on Robot Motion and Control (RoMoCo’17), Wasowo, Poland, 3–5 July 2017; pp. 205–210. [Google Scholar] [CrossRef]
- Sussmann, H.J. A general theorem on local controllability. SIAM J. Control Optim. 1987, 25, 158–194. [Google Scholar] [CrossRef]
- Galassi, M.; Davies, J.; Theiler, J.; Gough, B.; Jungman, G.; Alken, P.; Booth, M.; Rossi, F. GNU Scientific Library Reference Manual, for version 1.12, 3rd ed.; Network Theory Ltd.: Boston, MA, USA, 2009; ISBN 978-0954612078. [Google Scholar]
- Básaca-Preciado, L.C.; Sergiyenko, O.Y.; Rodríguez-Quinonez, J.C.; García, X.; Tyrsa, V.V.; Rivas-Lopez, M.; Hernandez-Balbuena, D.; Mercorelli, P.; Podrygalo, M.; Gurko, A.; et al. Optical 3D laser measurement system for navigation of autonomous mobile robot. Opt. Lasers Eng. 2014, 54, 159–169. [Google Scholar] [CrossRef]
- Rodríguez-Quiñonez, J.C.; Sergiyenko, O.; Flores-Fuentes, W.; Rivas-lopez, M.; Hernandez-Balbuena, D.; Rascón, R.; Mercorelli, P. Improve a 3D distance measurement accuracy in stereo vision systems using optimization methods’ approach. Opto Electr. Rev. 2017, 25, 24–32. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constraints | Reference | Canonical Form | Application | Control Approach | Explicit Use of Holonomy |
|---|---|---|---|---|---|
| [14] | Partially FL | Knife-edge, etc. | MP w/sinusoids | Yes | |
| [20] | 1st-order CF | Vehicle, etc. | MP w/sinusoids | Yes | |
| [1] | 1st-order CF | Multifingered robot hand | MP w/sinusoids | Yes | |
| [15] | Left-invariant | — | MP w/sinusoids | Yes | |
| [21] | Partially FL | Acrobot, etc. | Stab. by nonlinear FB | No | |
| [22] | 1st-order CF | Unicycle robot | Traj. tracking | No | |
| Kinematic | [18] | 1st-order non-CF | — | Stab. by Switched FB | Yes |
| [19] | Cross CF | — | Stab. by Switched FB | Yes | |
| [16] | — | Knife-edge | MP | Yes | |
| [17] | — | Rolling disk | MP | Yes | |
| [23] | 1st-order CF | Firetruck, etc. | Stab. by AISMC | No | |
| [24] | — | Rolling disk | Traj. tracking | No | |
| [7] | — | R-R UAM | Stab. to EM | No | |
| [11] | — | Surface vehicle | Stab. to EM | No | |
| [8] | 2nd-order CF | 2P-R UAM | Stab. to traj. | No | |
| [10] | 3rd-link’s acc. | 2R-R UAM | Stab. to composite traj. | No | |
| [9] | 2nd-order CF | 2R-R UAM | Traj. design (≈ MP) | No | |
| [25] | 2nd-order CF | 2P-R UAM | Stab. by discont. FB w/non-regular FL | No | |
| [26] | Last-link’s PFL | X-R UAM | Traj. tracking w/dynamic FL | No | |
| Dynamic | [27,28] | 2nd-order CF | 2P-R UAM | Traj. tracking w/cascaded BS | No |
| [28] | 2nd-order CF | 2R-R UAM | Stab. by Homogeneous FB | No | |
| [29] | port-Hamiltonian | 2R-R UAM | Stab. by IDA-PBC | No | |
| [30] | 2nd-order CF | 2P-R UAM | Traj. tracking & stab. | No | |
| [13] | 2nd-order CF | Underactuated AUV | Stab. by discontinuous FB | No | |
| [31] | 2nd-order CF | — | Stab. based on MPC | No | |
| [32] | 2nd-order CF | Underactuated hovercraft | Stab. by Hölder continuous FB | No | |
| [23] | 2nd-order CF | 2P-R UAM | Stab. by AISMC | No | |
| This paper | 2nd-order CF | 2R-R UAM | MP w/sinusoids | Yes | |
| 3rd | [23] | 3rd-order CF | 2P-R UAM w/jerk | Stab. by AISMC | No |
| : (relative) angle of the i-th joint (); | |
| : torque for the i-th joint (); | |
| : length of the i-th link (); | |
| : distance between the i-th joint and the center of mass of the i-th link (); | |
| : mass of the i-th link (); | |
| : moment of inertia mass of the i-th link (); | |
| K | : distance between the third joint and the center of percussion of the third link; |
| : position of the center of percussion of the third link in the frame ; | |
| : orientation of the third link with respect to the X-axis; | |
| : linear acceleration along the third link; | |
| : angular acceleration with respect to . |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ito, M. Motion Planning of a Second-Order Nonholonomic Chained Form System Based on Holonomy Extraction. Electronics 2019, 8, 1337. https://doi.org/10.3390/electronics8111337
Ito M. Motion Planning of a Second-Order Nonholonomic Chained Form System Based on Holonomy Extraction. Electronics. 2019; 8(11):1337. https://doi.org/10.3390/electronics8111337
Chicago/Turabian StyleIto, Masahide. 2019. "Motion Planning of a Second-Order Nonholonomic Chained Form System Based on Holonomy Extraction" Electronics 8, no. 11: 1337. https://doi.org/10.3390/electronics8111337
APA StyleIto, M. (2019). Motion Planning of a Second-Order Nonholonomic Chained Form System Based on Holonomy Extraction. Electronics, 8(11), 1337. https://doi.org/10.3390/electronics8111337