Improving RF Fingerprinting Methods by Means of D2D Communication Protocol



Abstract

1. Introduction and Motivation
2. Related Work
3. Material and Methods
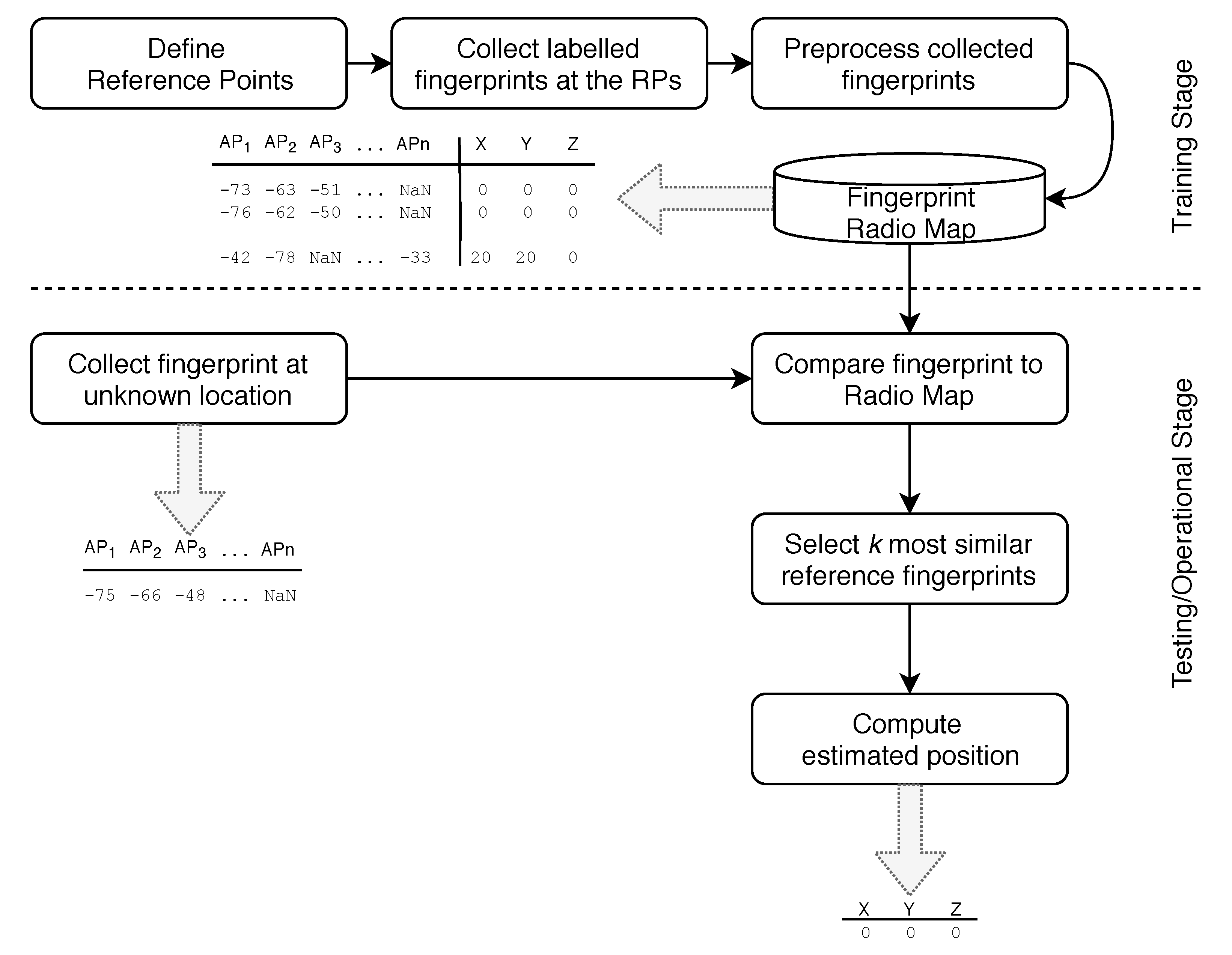
3.1. RF Fingerprint Positioning
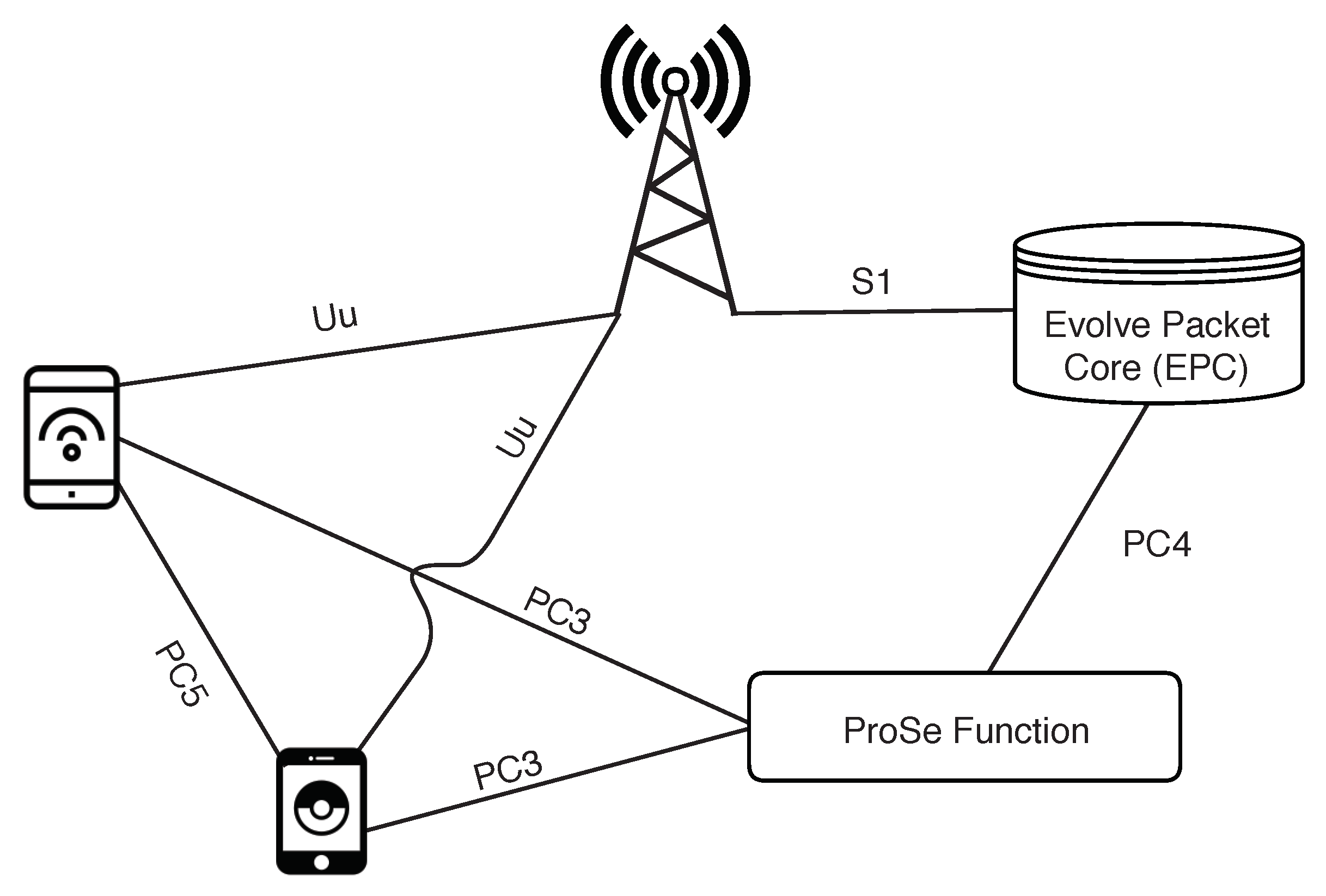
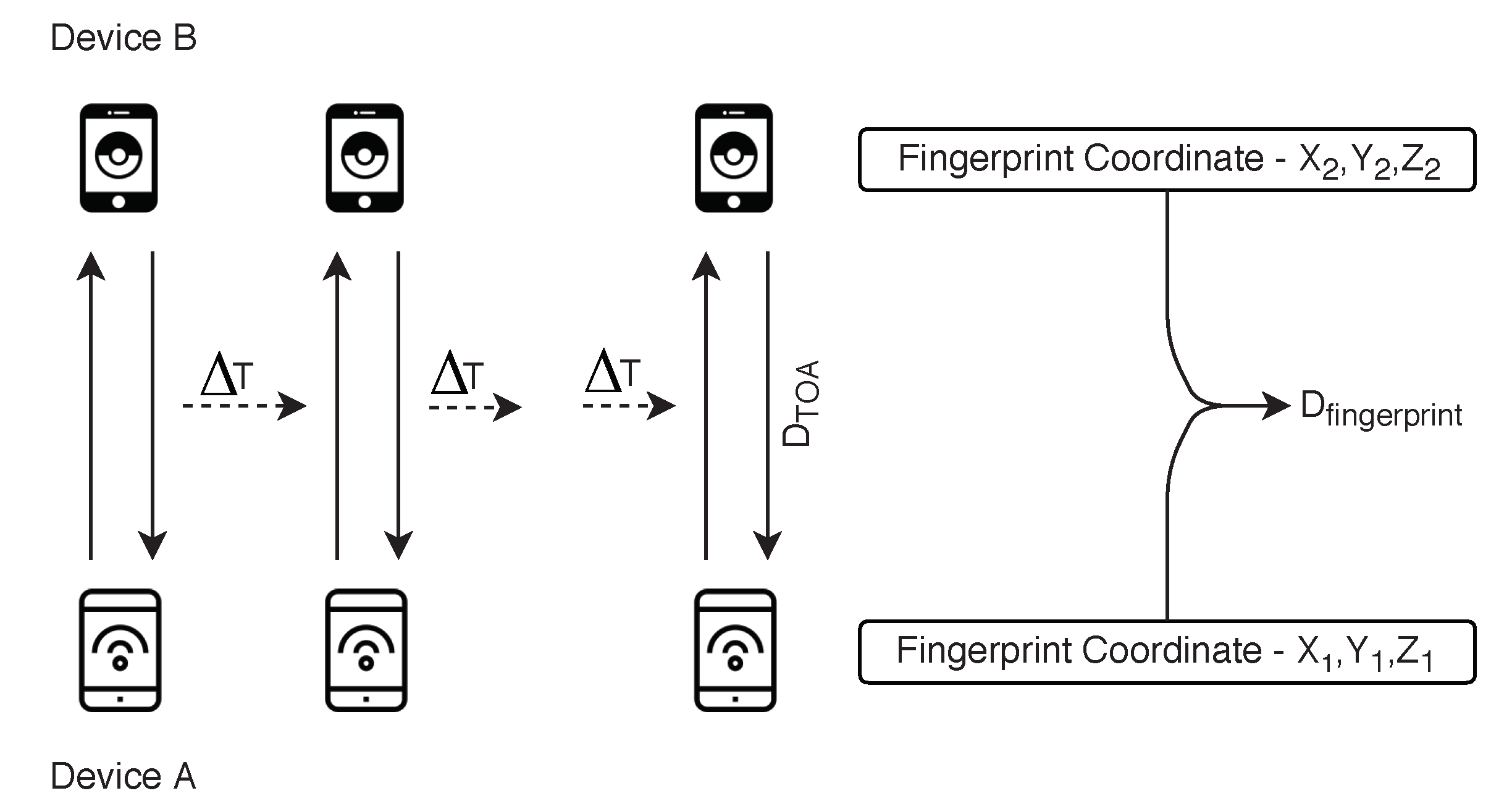
3.2. D2D Communication Aspects
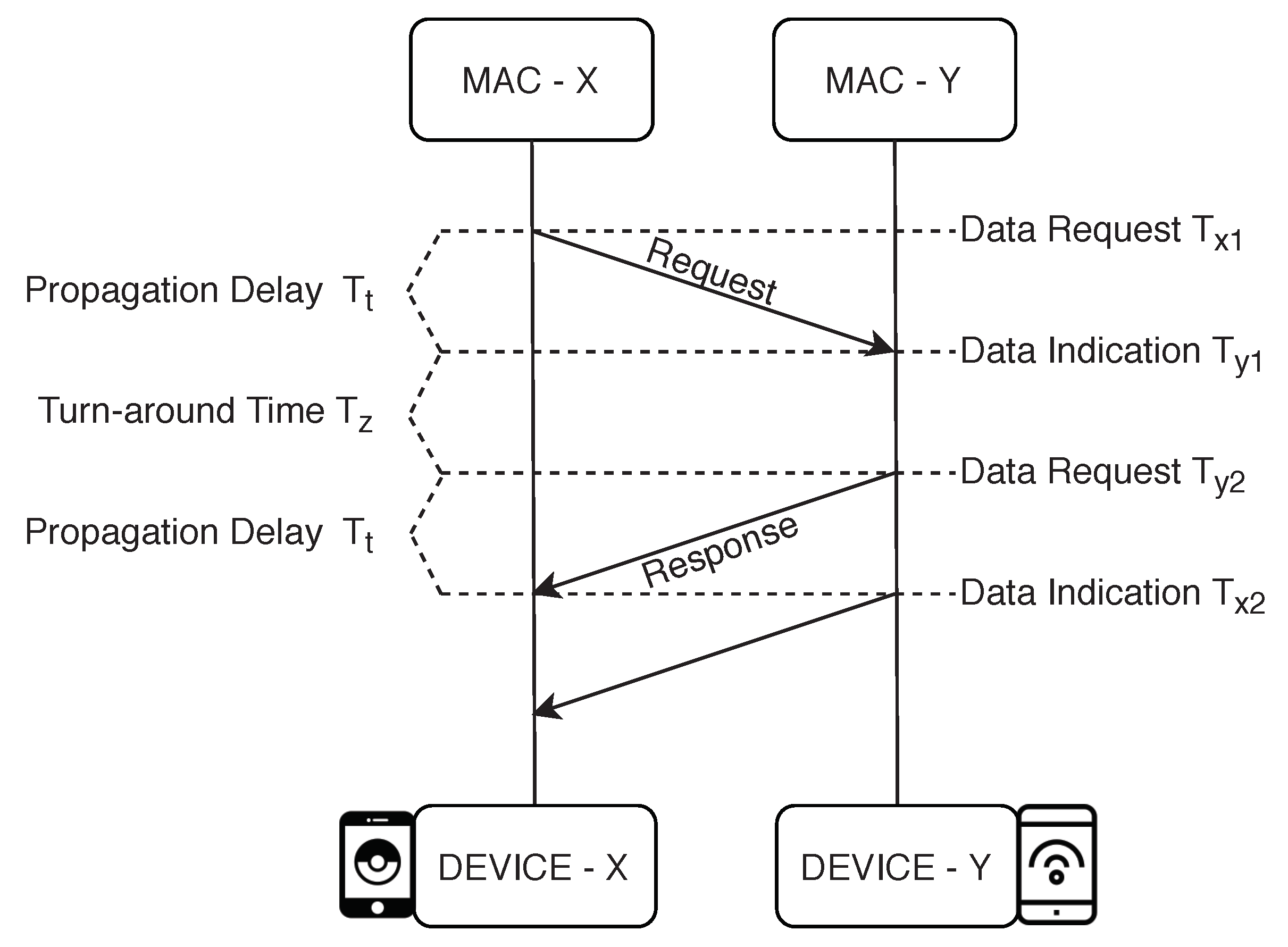
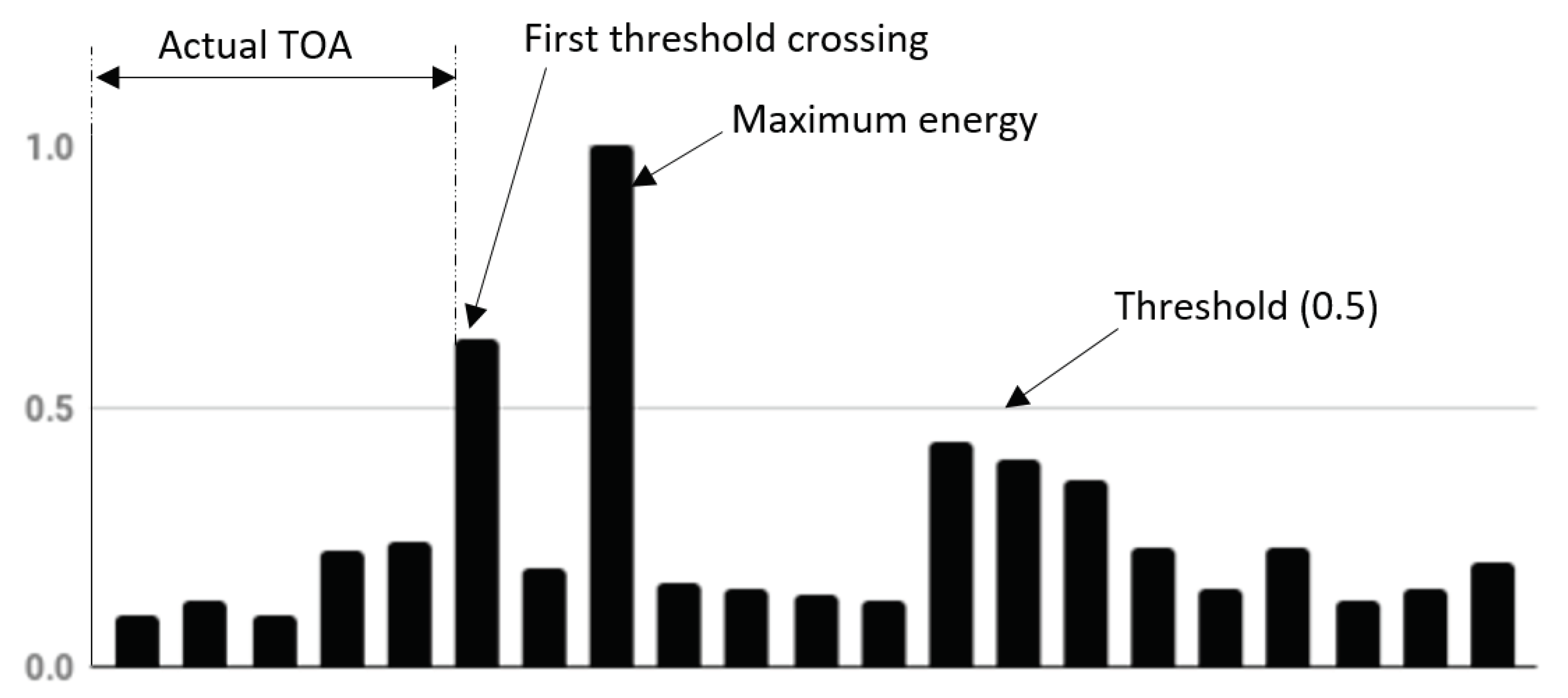
3.3. TOA Based Distance Determination
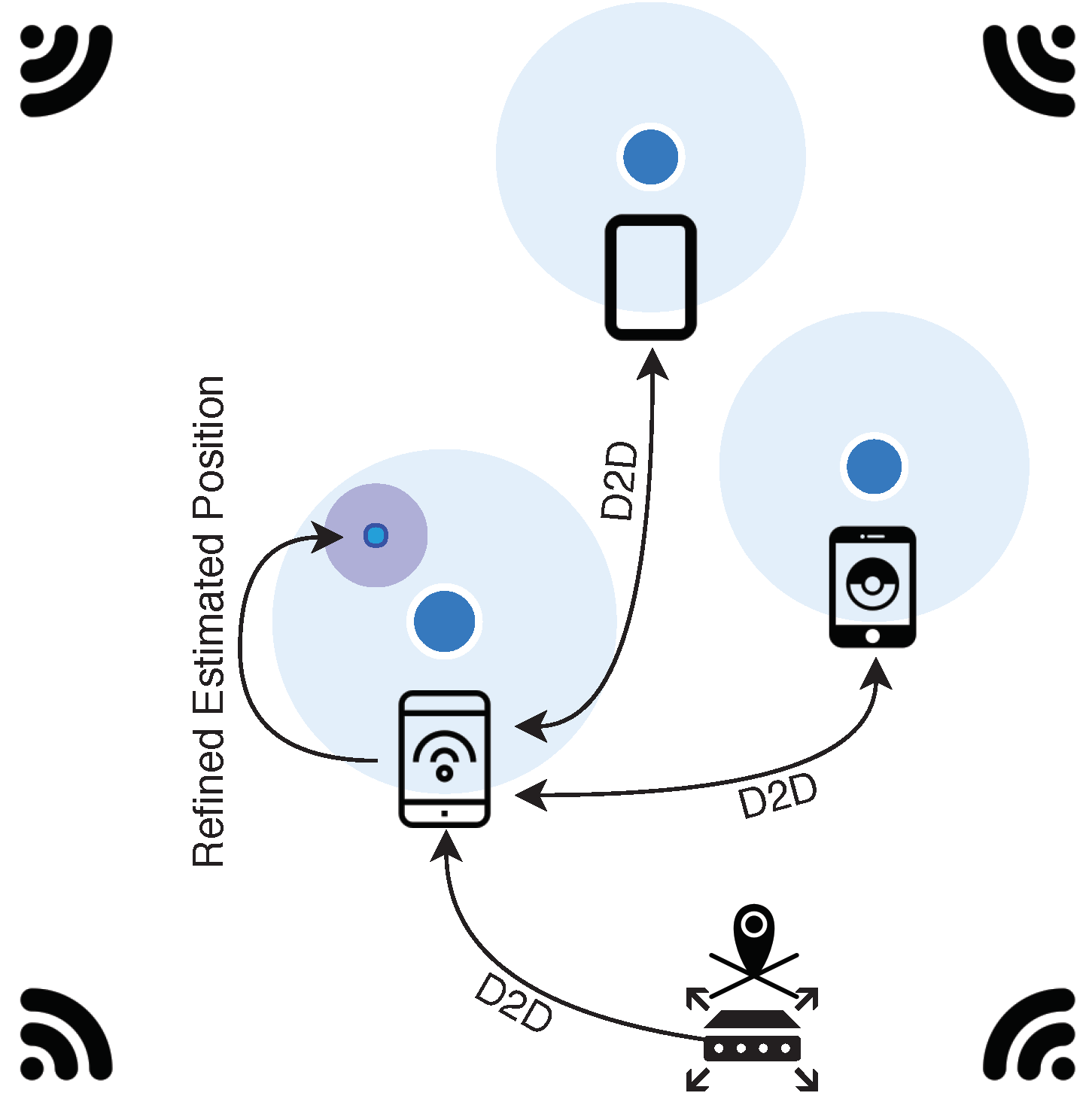
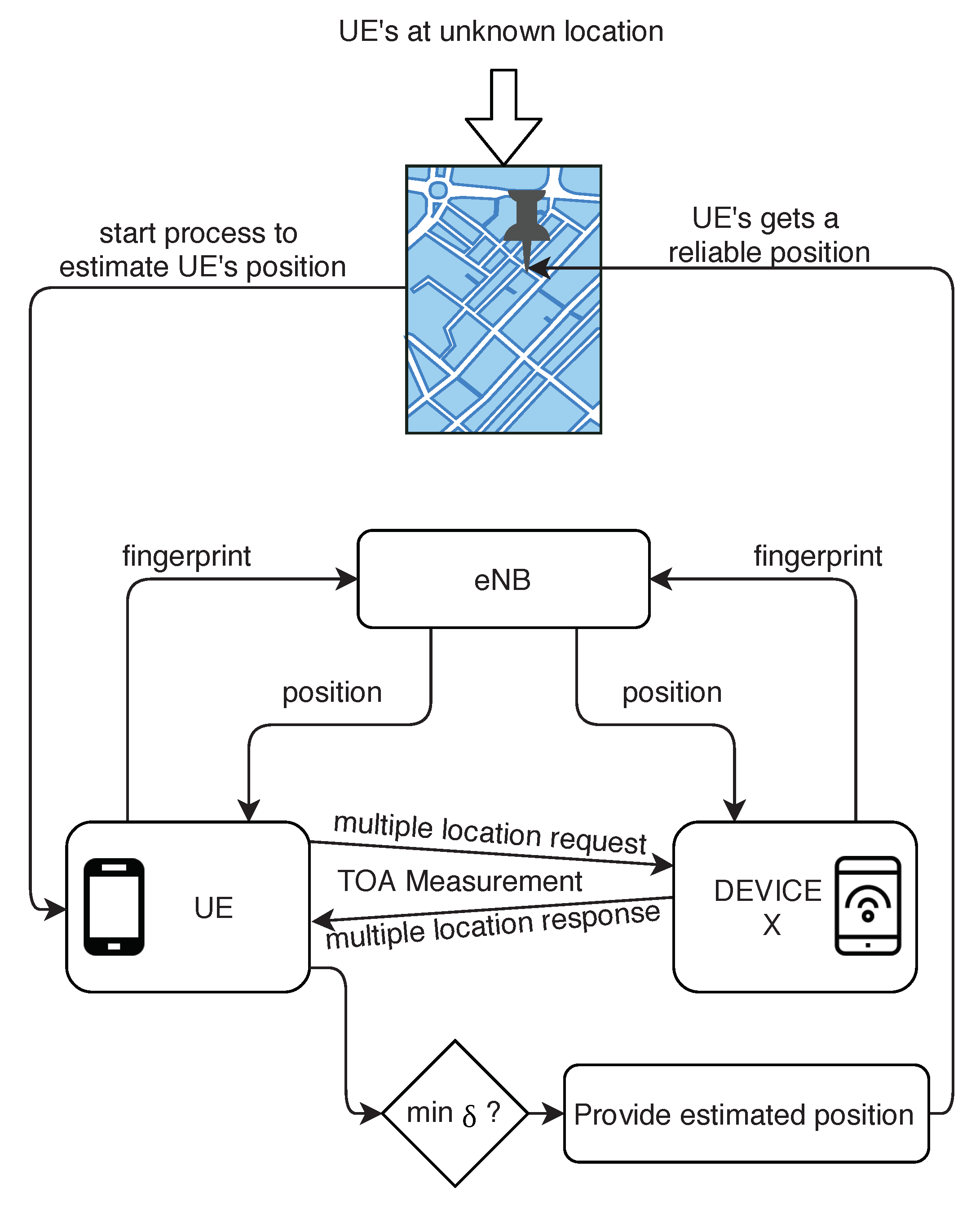
3.4. Description of the Proposed Method: D2D Communication Assisted RF Fingerprint Positioning
| Algorithm 1 Output = D2D( = 3) |
|
4. Experiment and Results
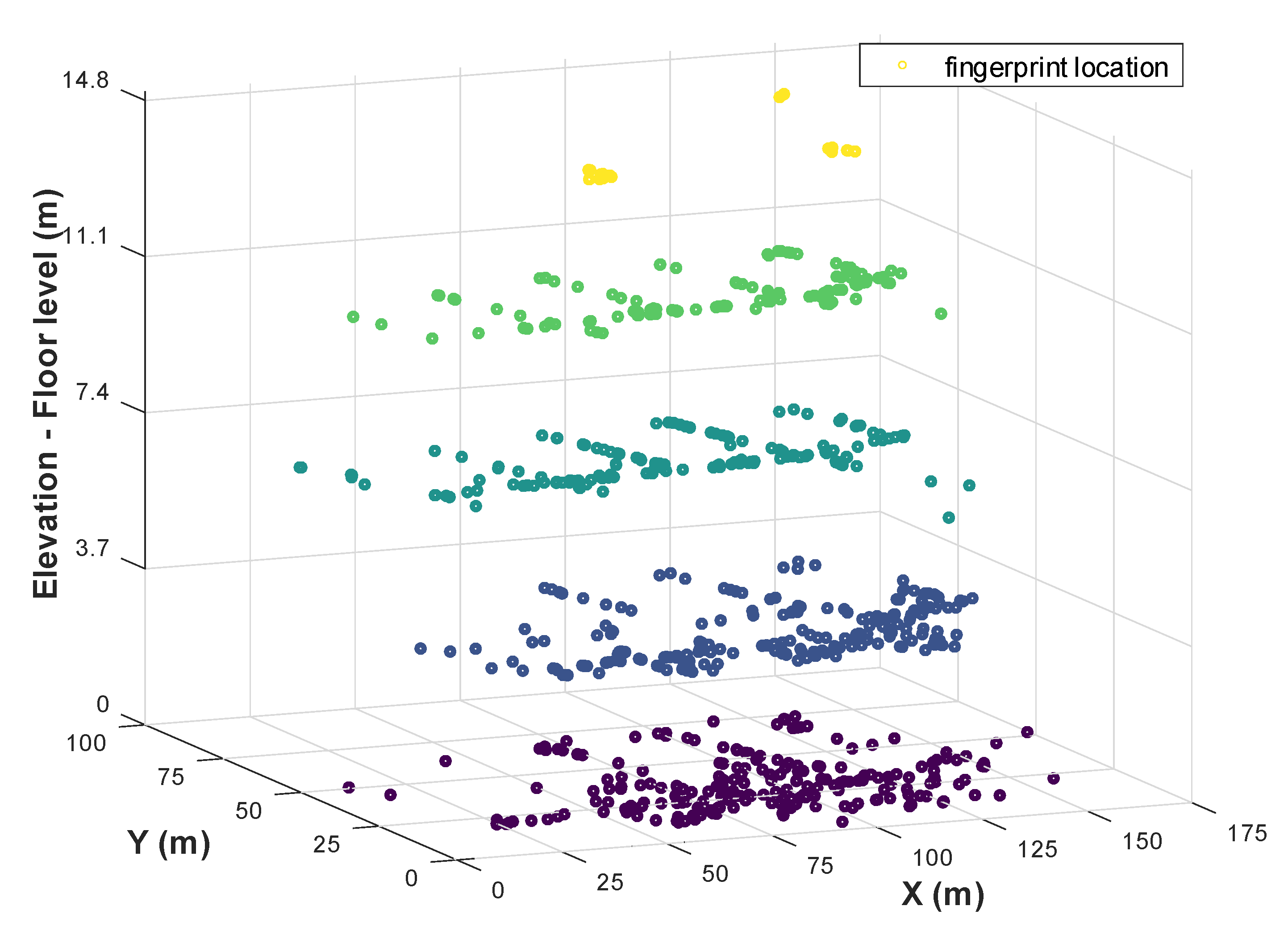
4.1. Database Description
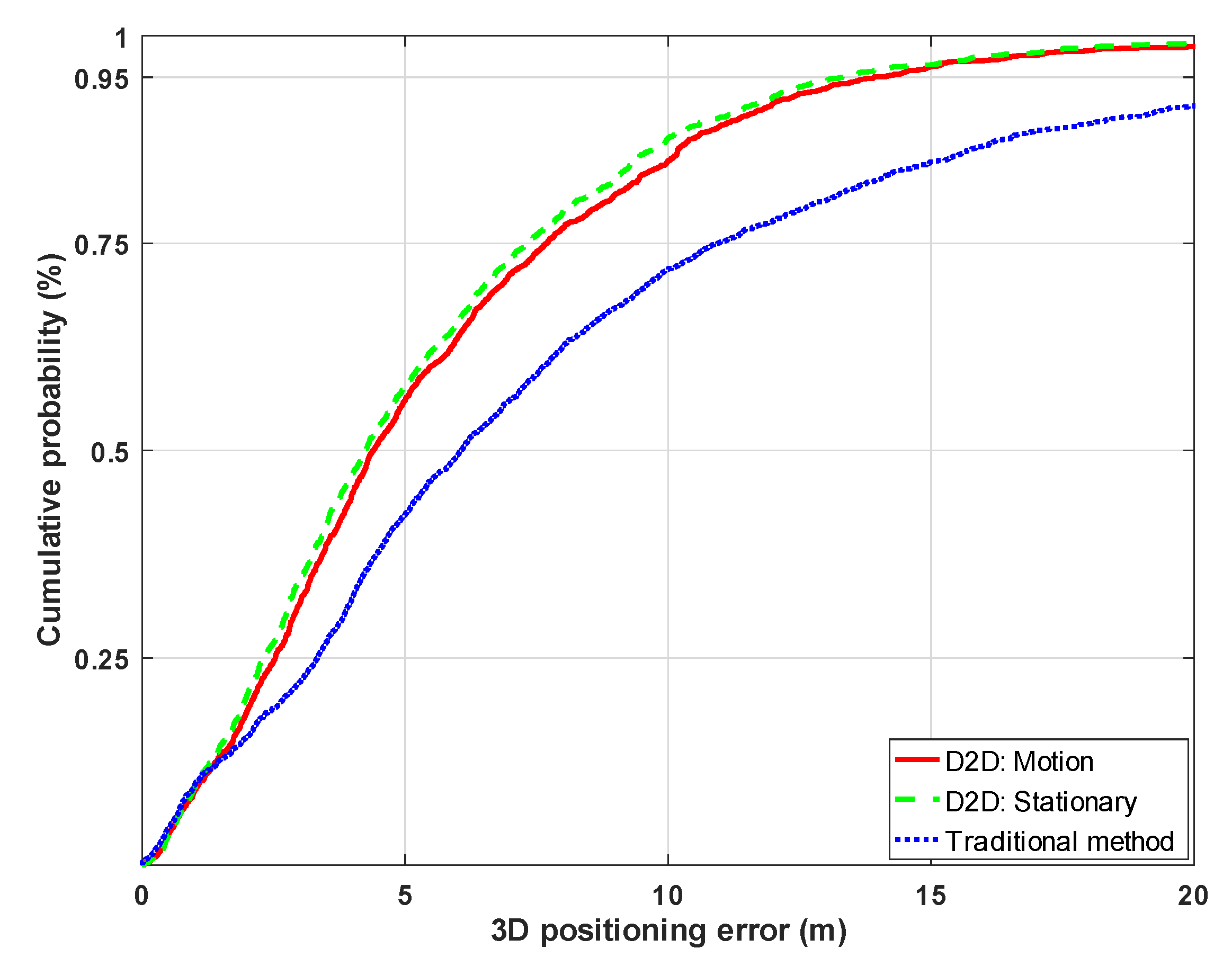
4.2. D2D Communication Assisted RF Fingerprint Positioning
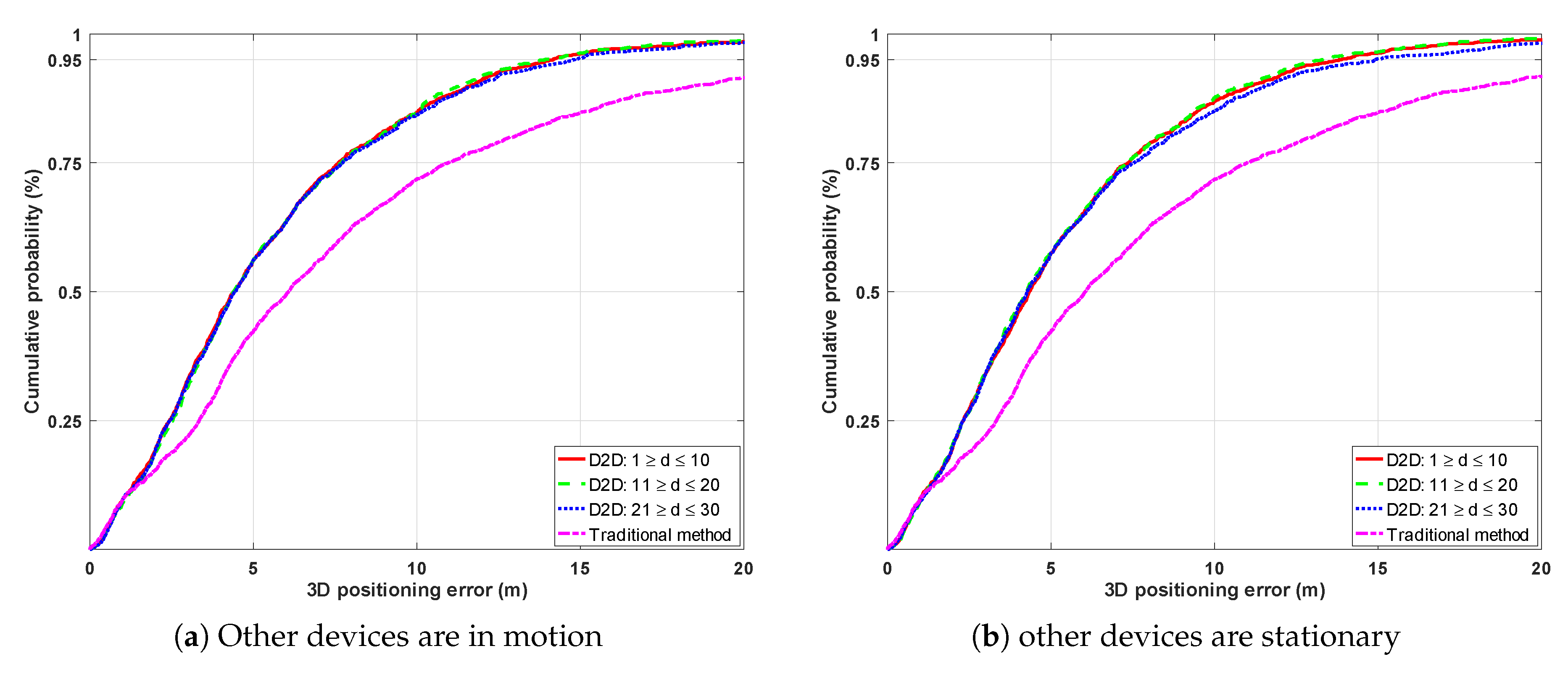
4.3. D2D Distance Effect
4.4. Effect of Motion Direction
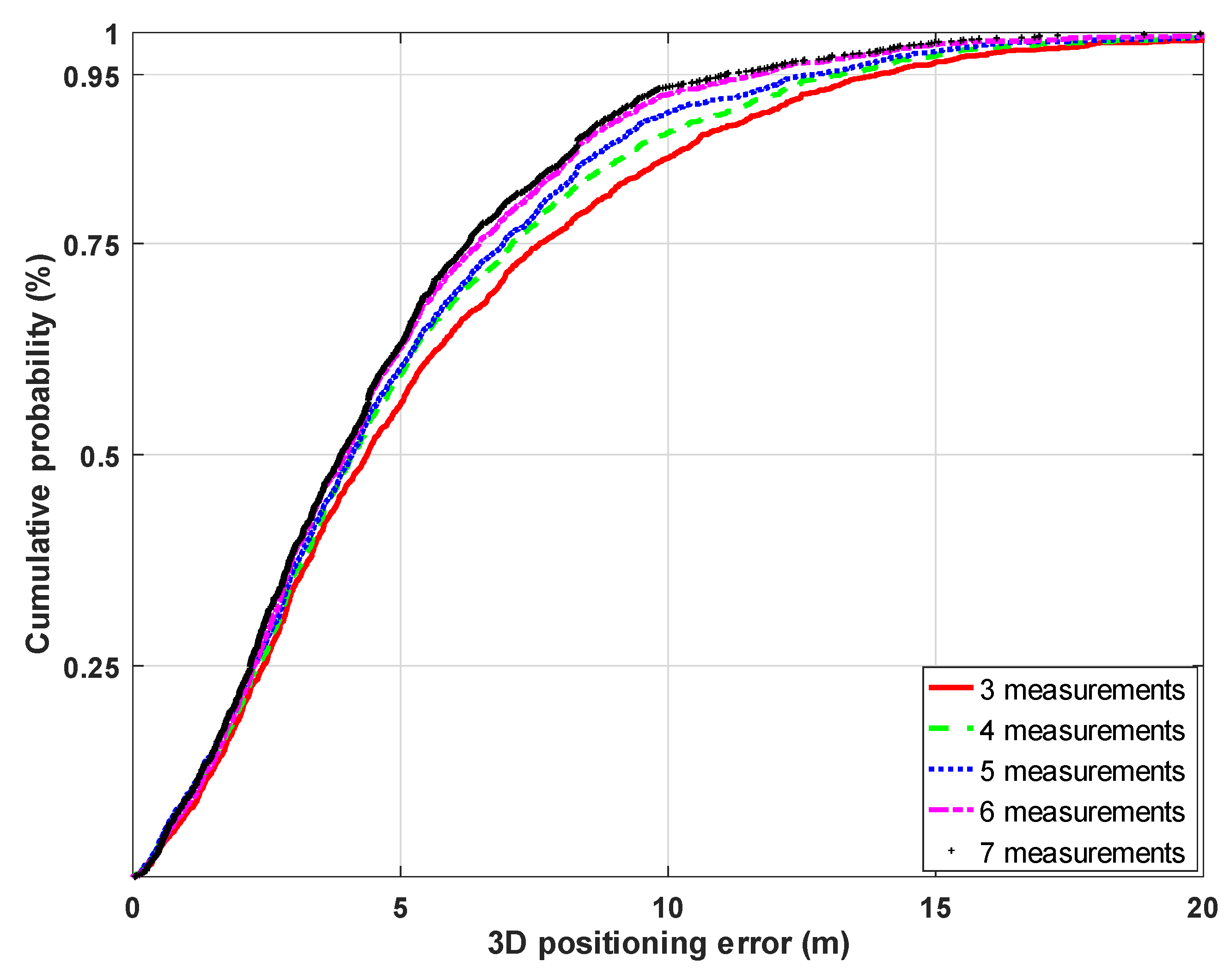
4.5. Amount of Measurements
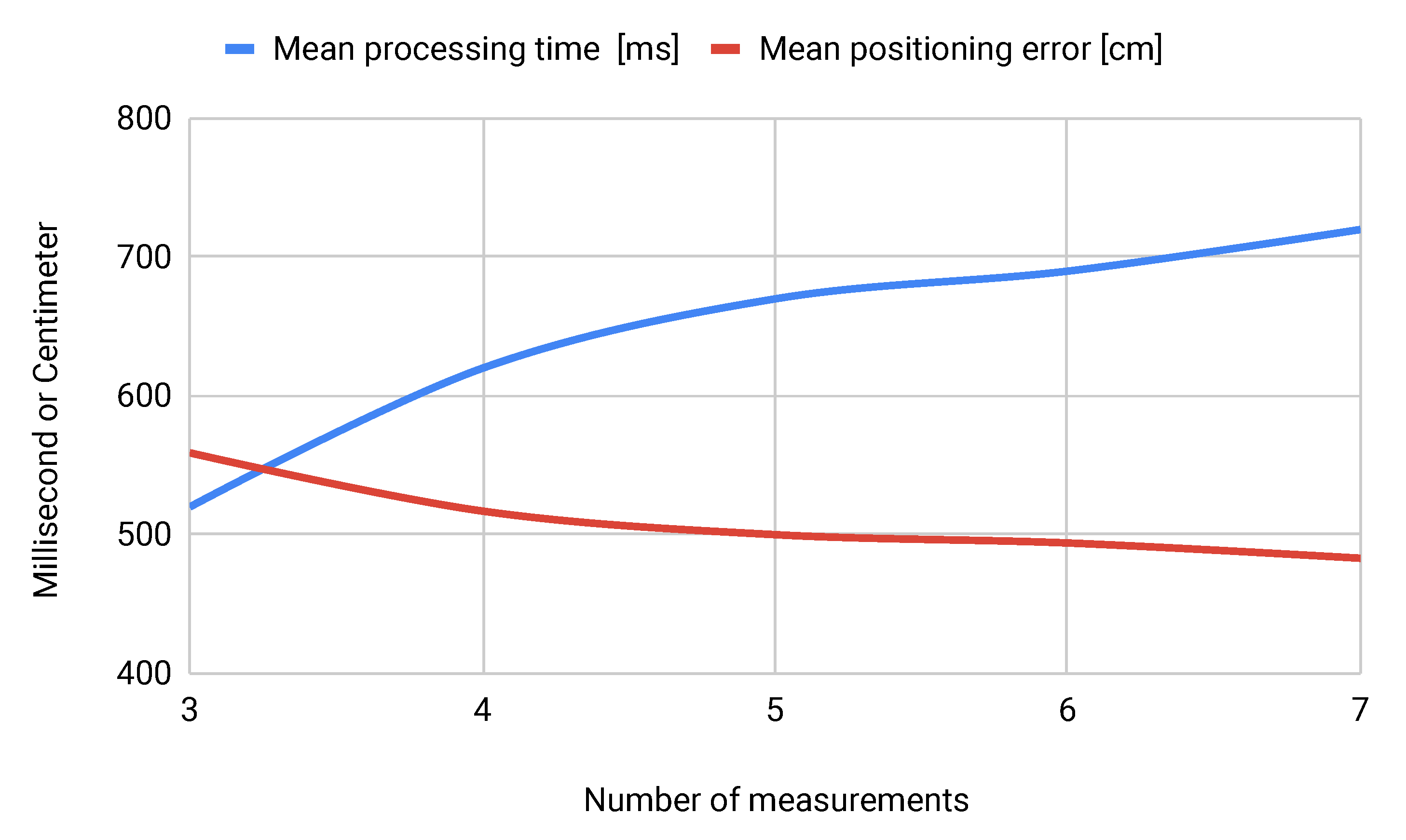
4.6. Processing Time vs. Performance
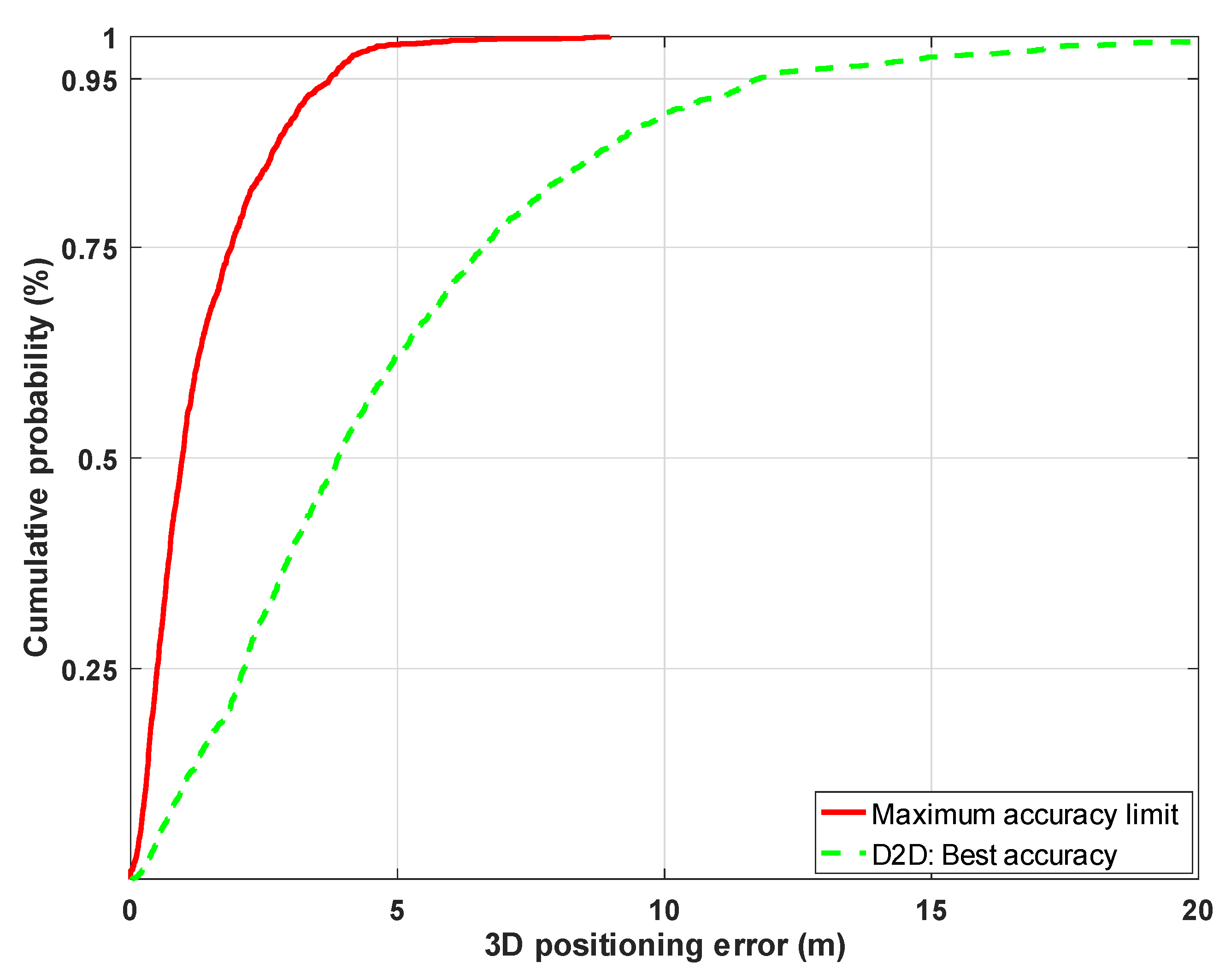
4.7. Accuracy Limit
4.8. Error Indicator
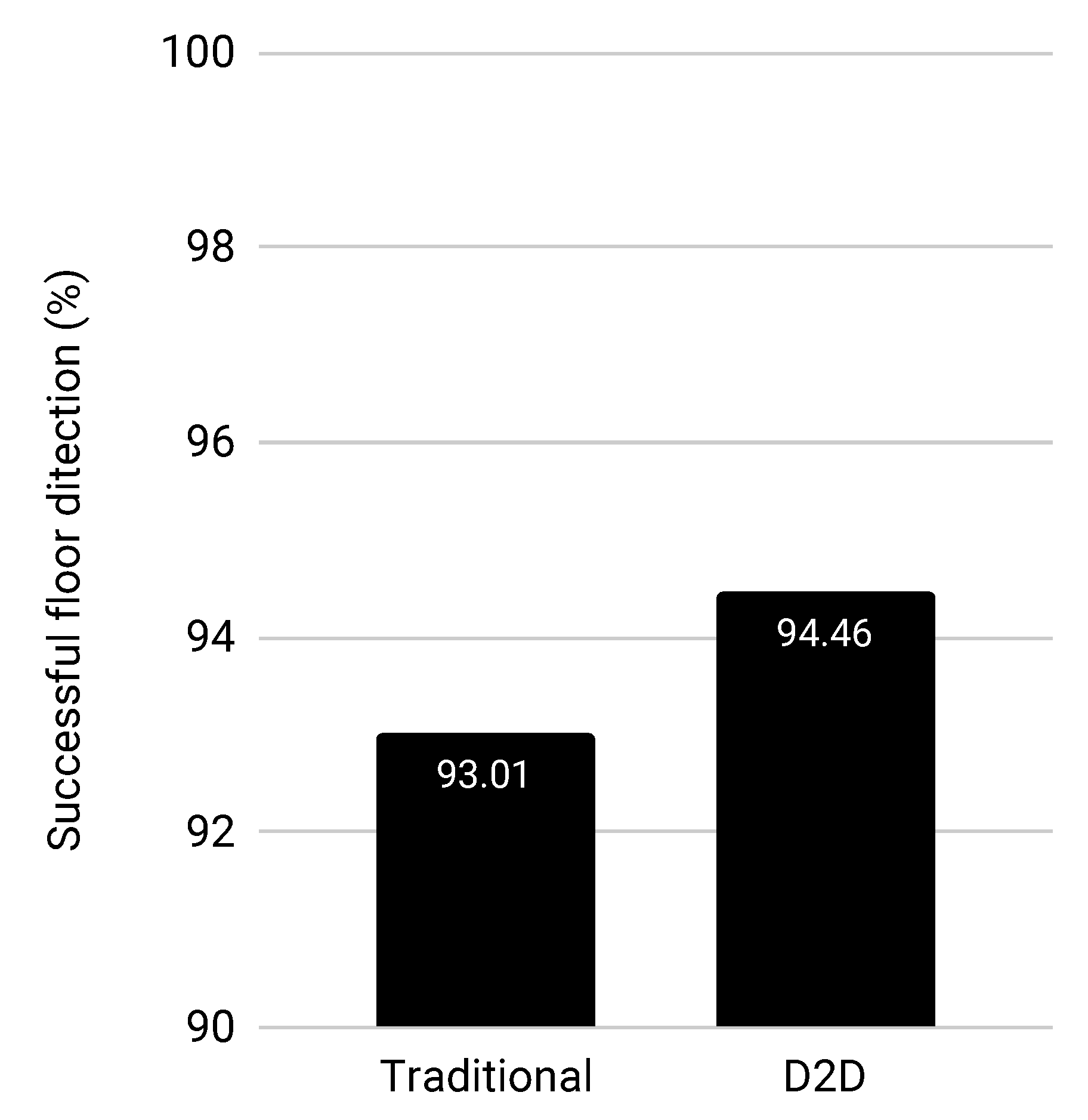
4.9. Successful Floor Detection
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- He, S.; Chan, S.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, T.; Guo, D.; Teng, X.; Yuan, B. From one to crowd: A survey on crowdsourcing-based wireless indoor localization. Front. Comput. Sci. 2018, 12, 423–450. [Google Scholar] [CrossRef]
- Luo, C.; Hong, H.; Chan, M.C. PiLoc: A self-calibrating participatory indoor localization system. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 143–153. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies; ETH Zurich: Zurich, Switzerland, 2012. [Google Scholar]
- Del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of Cellular Mobile Radio Localization Methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2018, 20, 1124–1148. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Youssef, M.; Agrawala, A.; Shankar, A.U. WLAN location determination via clustering and probability distributions. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26–26 March 2003. [Google Scholar]
- Meneses, F.; Moreira, A.; Costa, A.; Nicolau, M.J. Chapter 4: Radio Maps for Fingerprinting in Indoor Positioning. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Conesa, J., Ed.; Academic Press: Cambridge, MA, USA, 2019; pp. 69–95. [Google Scholar]
- Potortì, F.; Park, S.; Jiménez Ruiz, A.R.; Barsocchi, P.; Girolami, M.; Crivello, A.; Lee, S.Y.; Lim, J.H.; Torres-Sospedra, J.; Seco, F.; et al. Comparing the Performance of Indoor Localization Systems through the EvAAL Framework. Sensors 2017, 17, 2327. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization from the Device Perspective. ACM Comput. Surv. 2016, 49. [Google Scholar] [CrossRef]
- Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Moreira, A. Analysis of Sources of Large Positioning Errors in Deterministic Fingerprinting. Sensors 2017, 17, 2736. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s received signal strength indication for indoor location fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Cramariuc, A.; Huttunen, H.; Lohan, E.S. Clustering benefits in mobile-centric WiFi positioning in multi-floor buildings. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- Prasithsangaree, P.; Krishnamurthy, P.; Chrysanthis, P. On indoor position location with wireless LANs. In Proceedings of the 13th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Lisboa, Portugal, 15–18 September 2002; pp. 720–724. [Google Scholar]
- Moreira, A.; Silva, I.; Meneses, F.; Nicolau, M.J.; Pendao, C.; Torres-Sospedra, J. Multiple simultaneous Wi-Fi measurements in fingerprinting indoor positioning. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Trawiński, K.; Alonso, J.M.; Hernández, N. A multiclassifier approach for topology-based WiFi indoor localization. Soft Comput. 2013, 17, 1817–1831. [Google Scholar] [CrossRef]
- Richter, P.; Toledano-Ayala, M. Revisiting Gaussian Process Regression Modeling for Localization in Wireless Sensor Networks. Sensors 2015, 15, 22587–22615. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Chen, X.; Liu, T.; Lei, L. Toward Green and Secure Communications over Massive MIMO Relay Networks: Joint Source and Relay Power Allocation. IEEE Access 2017, 5, 869–880. [Google Scholar] [CrossRef]
- Mahapatra, R.; Nijsure, Y.; Kaddoum, G.; Hassan, N.U.; Yuen, C. Energy Efficiency Tradeoff Mechanism Towards Wireless Green Communication: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 686–705. [Google Scholar] [CrossRef]
- Savarese, C.; Rabaey, J.M.; Beutel, J. Location in distributed ad-hoc wireless sensor networks. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal, Salt Lake City, UT, USA, 7–11 May 2001; pp. 2037–2040. [Google Scholar]
- Howard, A.; Matarić, M.J.; Sukhatme, G.S. Localization for Mobile Robot Teams: A Distributed MLE Approach. In Experimental Robotics VIII; Siciliano, B., Dario, P., Eds.; Springer: Berlin/Heidelberg, German, 2003; pp. 146–155. [Google Scholar]
- Cheng, B.H.; Hudson, R.E.; Lorenzelli, F.; Vandenberghe, L.; Yao, K. Distributed Gauss-Newton method for node loclaization in wireless sensor networks. In Proceedings of the IEEE 6th Workshop on Signal Processing Advances in Wireless Communications, New York, NY, USA, 5–8 June 2005; pp. 915–919. [Google Scholar]
- Fox, D.; Burgard, W.; Kruppa, H.; Thrun, S. Collaborative Multi-Robot Localization. In Mustererkennung 1999; Förstner, W., Buhmann, J.M., Faber, A., Faber, P., Eds.; Springer: Berlin/Heidelberg, German, 1999; pp. 15–26. [Google Scholar]
- Buehrer, R.M.; Wymeersch, H.; Vaghefi, R.M. Collaborative Sensor Network Localization: Algorithms and Practical Issues. Proc. IEEE 2018, 106, 1089–1114. [Google Scholar] [CrossRef]
- Papapostolou, A.; Xiao, W.; Chaouchi, H. Cooperative fingerprint-based indoor localization using Self-Organizing Maps. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 1814–1819. [Google Scholar]
- Iwase, T.; Shibasaki, R. Infra-free indoor positioning using only smartphone sensors. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 Octorber 2013; pp. 1–8. [Google Scholar]
- Vaghefi, R.M.; Buehrer, R.M. Cooperative RF pattern matching positioning for LTE cellular systems. In Proceedings of the 2014 IEEE 25th Annual International Symposium on Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 264–269. [Google Scholar]
- Bargshady, N.; Pahlavan, K.; Alsindi, N.A. Hybrid WiFi/UWB, cooperative localization using Particle Filter. In Proceedings of the 2015 International Conference on Computing, Networking and Communications, Garden Grove, CA, USA, 16–19 February 2015; pp. 1055–1060. [Google Scholar]
- Karlsson, M.; Karlsson, F. Cooperative indoor positioning by exchange of bluetooth signals and state estimates between users. In Proceedings of the 2016 European Control Conference (ECC), Aalborg, Denmark, 29 June–1 July 2016; pp. 1440–1444. [Google Scholar]
- Chen, L.; Yang, K.; Wang, X. Robust Cooperative Wi-Fi Fingerprint-Based Indoor Localization. IEEE Internet Things J. 2016, 3, 1406–1417. [Google Scholar] [CrossRef]
- Cui, X.; Gulliver, T.A.; Song, H.; Li, J. Real-Time Positioning Based on Millimeter Wave Device to Device Communications. IEEE Access 2016, 4, 5520–5530. [Google Scholar] [CrossRef]
- Raveneau, P.; D’Alu, S.; Rivano, H. Localisation based on Wi-Fi fingerprints: A crowdsensing approach with a device-to-device aim. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 321–325. [Google Scholar]
- Yin, L.; Ni, Q.; Deng, Z. A GNSS/5G Integrated Positioning Methodology in D2D Communication Networks. IEEE J. Sel. Areas Commun. 2018, 36, 351–362. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Óscar, B.; Huerta, J. Comprehensive analysis of distance and similarity measures for Wi-Fi fingerprinting indoor positioning systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Minaev, G.; Visa, A.; Piché, R. Comprehensive survey of similarity measures for ranked based location fingerprinting algorithm. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–4. [Google Scholar]
- 3rd Generation Partnership Project (3GPP). TR 22.803 V12.2.0, Feasibility Study for Proximity Services (ProSe). Available online: http://www.3gpp.org/ftp/Specs/archive/22_series/22.803/22803-c20.zip (accessed on 10 November 2018).
- Höyhtyä, M.; Apilo, O.; Lasanen, M. Review of Latest Advances in 3GPP Standardization: D2D Communication in 5G Systems and Its Energy Consumption Models. Future Internet 2018, 10, 3. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project (3GPP). TR 36.843 V12.0.1, Study on LTE Device to Device Proximity Services. Available online: http://www.3gpp.org/ftp/Specs/archive/36_series/36.843/36843-c01.zip (accessed on 15 November 2018).
- Hara, S.; Anzai, D.; Yabu, T.; Lee, K.; Derham, T.; Zemek, R. A Perturbation Analysis on the Performance of TOA and TDOA Localization in Mixed LOS/NLOS Environments. IEEE Trans. Commun. 2013, 61, 679–689. [Google Scholar] [CrossRef]
- Singh, V.K.; Chawla, H.; Bohara, V.A. A Proof-of-Concept Device-to-Device Communication Testbed. arXiv, 2016; arXiv:1601.01398. [Google Scholar]
- Ramirez, E. Privacy and the IoT: Navigating Policy Issues—International Consumer Electronics Show. Available online: https://www.ftc.gov/system/files/documents/public_statements/617191/150106cesspeech.pdf (accessed on 14 November 2018).
- Shi, Y.; Jensen, M.A. Improved Radiometric Identification of Wireless Devices Using MIMO Transmission. IEEE Trans. Inf. Forensics Secur. 2011, 6, 1346–1354. [Google Scholar] [CrossRef]
- Li, Q.; Fan, H.; Sun, W.; Li, J.; Chen, L.; Liu, Z. Fingerprints in the Air: Unique Identification of Wireless Devices Using RF RSS Fingerprints. IEEE Sens. J. 2017, 17, 3568–3579. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, X.; Lin, Y. Trust Management Method of D2D Communication Based on RF Fingerprint Identification. IEEE Access 2018, 6, 66082–66087. [Google Scholar] [CrossRef]
- IEEE Computer Society. IEEE Standard 802.15.4a; IEEE: New York, NY, USA, 2007. [Google Scholar]
- Akiyama, T.; Sugimoto, M.; Hashizume, H. SyncSync: Time-of-arrival based localization method using light-synchronized acoustic waves for smartphones. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 Octorber 2015; pp. 1–9. [Google Scholar]
- Qi, Y.; Kobayashi, H.; Suda, H. Analysis of wireless geolocation in a non-line-of-sight environment. IEEE Trans. Wirel. Commun. 2006, 5, 672–681. [Google Scholar]
- Riba, J.; Urruela, A. A non-line-of-sight mitigation technique based on ML-detection. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, L.; Cai, H.; Liu, Y.; Ni, L.M. WiFi-Based Indoor Line-of-Sight Identification. IEEE Trans. Wirel. Commun. 2015, 14, 6125–6136. [Google Scholar] [CrossRef]
- Haus, M.; Waqas, M.; Ding, A.Y.; Li, Y.; Tarkoma, S.; Ott, J. Security and Privacy in Device-to-Device (D2D) Communication: A Review. IEEE Commun. Surv. Tutor. 2017, 19, 1054–1079. [Google Scholar] [CrossRef]
- Jin, B.; Jiang, D.; Xiong, J.; Chen, L.; Li, Q. D2D Data Privacy Protection Mechanism Based on Reliability and Homomorphic Encryption. IEEE Access 2018, 6, 51140–51150. [Google Scholar] [CrossRef]
- Lohan, E.S.; Torres-Sospedra, J.; Richter, P.; Leppäkoski, H.; Huerta, J.; Cramariuc, A. Crowdsourced WiFi database and benchmark software for indoor positioning. Analysis 2017. [Google Scholar] [CrossRef]
- ISO. Information Technology–Real Time Locating Systems–Test and Evaluation of Localization and Tracking Systems (ISO/IEC 18305:2016); International Organization for Standardization: Geneva, Switzerland, 2016; pp. 1–76. [Google Scholar]
- Potortì, F.; Crivello, A.; Palumbo, F. Chapter 11: The EvAAL Evaluation Framework and the IPIN Competitions. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Conesa, J., Ed.; Academic Press: Cambridge, MA, USA, 2019; pp. 209–224. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value of | Amount of Test Fingerprints | Mean 3D Positioning Error |
|---|---|---|
| <0.5 m | 575 | 3.92 m |
| 0.5 m to <1 m | 360 | 4.61 m |
| 1 m to <2 m | 450 | 4.73 m |
| 2 m to <3 m | 197 | 5.29 m |
| 3 m to <4 m | 120 | 5.86 m |
| 4 m to <5 m | 65 | 6.53 m |
| >5 m | 93 | 8.20 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khandker, S.; Torres-Sospedra, J.; Ristaniemi, T. Improving RF Fingerprinting Methods by Means of D2D Communication Protocol. Electronics 2019, 8, 97. https://doi.org/10.3390/electronics8010097
Khandker S, Torres-Sospedra J, Ristaniemi T. Improving RF Fingerprinting Methods by Means of D2D Communication Protocol. Electronics. 2019; 8(1):97. https://doi.org/10.3390/electronics8010097
Chicago/Turabian StyleKhandker, Syed, Joaquín Torres-Sospedra, and Tapani Ristaniemi. 2019. "Improving RF Fingerprinting Methods by Means of D2D Communication Protocol" Electronics 8, no. 1: 97. https://doi.org/10.3390/electronics8010097
APA StyleKhandker, S., Torres-Sospedra, J., & Ristaniemi, T. (2019). Improving RF Fingerprinting Methods by Means of D2D Communication Protocol. Electronics, 8(1), 97. https://doi.org/10.3390/electronics8010097