An Event-Triggered Fault Detection Approach in Cyber-Physical Systems with Sensor Nonlinearities and Deception Attacks

Abstract
1. Introduction
1.1. Related Work
1.2. Main Contribution
- (1)
- A new event-triggered fault-detection filter for CPSs is proposed against the phenomena of sensor nonlinearities, deception attacks and additive disturbances, where the sensor nonlinearities is assumed to occur randomly according to a random variable satisfying the Bernoulli distribution.
- (2)
- A fault-detection filter problem is formulated by maximizing the sensitivity of faults and minimizing the influences of additive disturbances and false information injected by attackers. The filter gain and residual weighting matrix are derived by stochastic Lyapunov function, which can be easily solved via standard numerical software.
- (3)
- At the end of this paper, an application example to event-triggered fault detection of one-dimensional target tracking is presented. The estimation accuracy and fault-detection capacity are demonstrated by comparative simulations. The prolonged battery life is experimentally evaluated and analyzed via a wireless node platform.
2. Problem Statement
3. Event-Triggered Fault-Detection Filter Analysis and Design
3.1. Residual Generator
- (1)
- The dynamic error system in Equation (15) is mean-square stable when or .
- (2)
- Under the zero initial condition, the fault-detection filter satisfiesfor all admissible , and .
| Algorithm 1 Computation of event-triggered fault-detection filter parameters |
Step 1: Calculate the minimum of and the maximum of using Equations (18) and (24) in Theorem 1 and Theorem 2, respectively. Step 2: Replace the minimum of in Equation (18) and the maximum of in Equation (24) with and , respectively. Step 3: If the obtained and can make Equations (18) and (24) feasible simultaneously, then the optimal filter gain L and the residual weighting matrix V can be determined. Otherwise, go to Step 3. Step 4: Choose a sufficient positive constant . Assign and . Solve Equations (18) and (24) with the updated and . End |
3.2. Residual Evaluator
| Algorithm 2 Fault-alarming strategy |
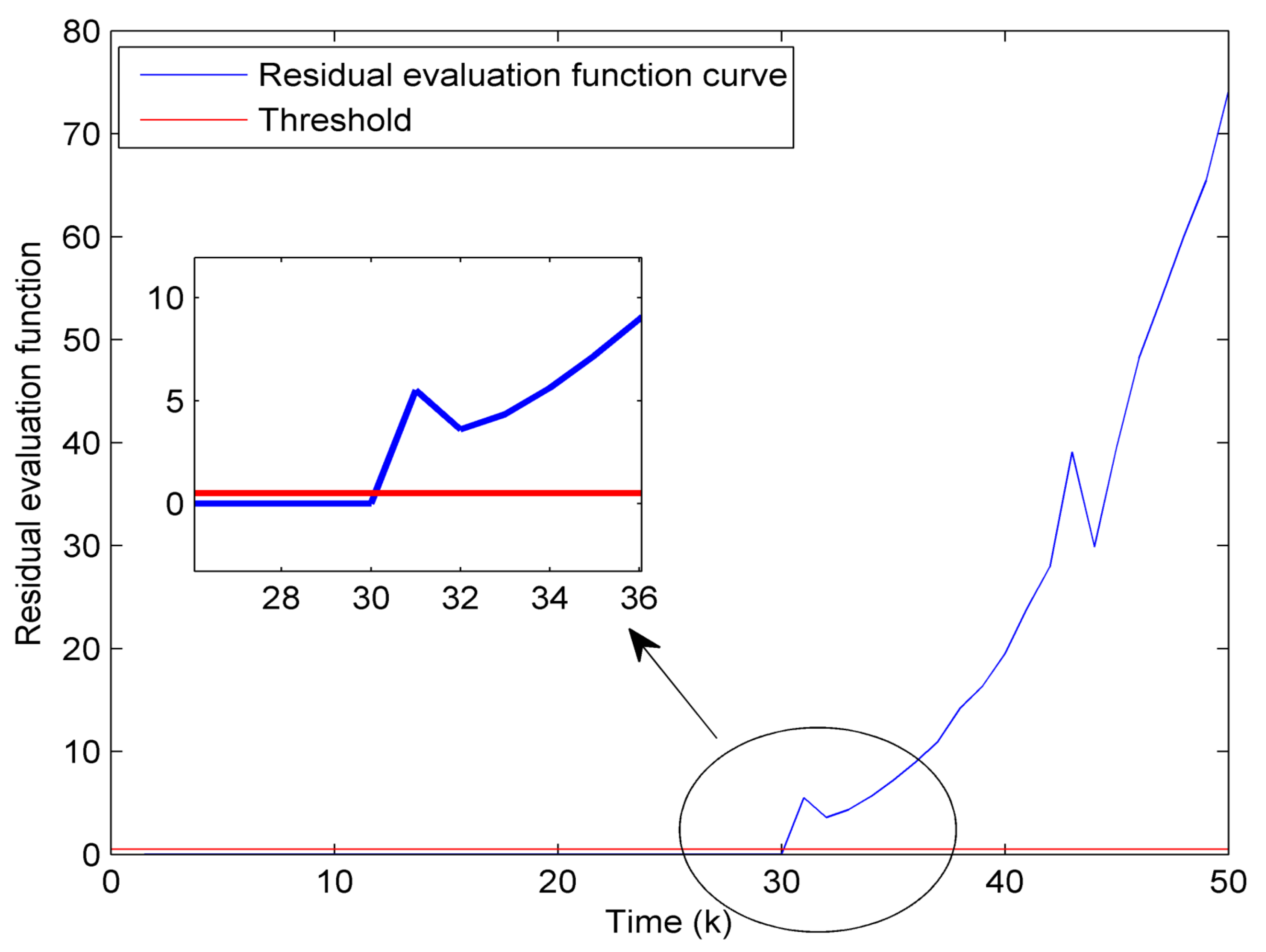
Step 1: Design an event-triggered fault-detection filter of the form in Equation (13) based on the design procedure of Algorithm 1. Step 2: Calculate fault-detection residual generator in Equation (14). Step 3: Determine the residual evaluation function and the threshold . Step 4: If is above the threshold , then a fault is detected and the corresponding fault alarm can be turned on. Otherwise, the system is healthy. End |
4. Application to Event-Triggered Fault Detection of a One-Dimensional Target Tracking
4.1. Target Tracking Description and Modeling
4.2. Assessment of Effectiveness of the Designed Fault-Detection Filter
- an incipient fault:
- a sudden-changing fault:
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Theorem 1
Appendix B. Proof of Theorem 2
References
- Seshia, S.A.; Hu, S.; Li, W.; Zhu, Q. Design Automation of Cyber-Physical Systems: Challenges, Advances, and Opportunities. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2017, 36, 1421–1434. [Google Scholar] [CrossRef]
- Naghshtabrizi, P.; Joa, B.; Xu, Y. A Survey of Recent Results in Networked Control Systems. Proc. IEEE 2007, 95, 138–162. [Google Scholar] [CrossRef]
- Pandey, A.; Tripathi, R.C. A Survey on Wireless Sensor Networks Security. Int. J. Comput. Appl. 2010, 3, 43–49. [Google Scholar] [CrossRef]
- Sridhar, B.S.; Hahn, A.; Govindarasu, M. Cyber-Physical System Security for the Electric Power Grid. Proc. IEEE 2012, 100, 210–224. [Google Scholar] [CrossRef]
- Khaitan, S.K.; Member, S.; Mccalley, J.D. Design Techniques and Applications of Cyberphysical Systems: A Survey. IEEE Syst. J. 2015, 9, 350–365. [Google Scholar] [CrossRef]
- Sang, C.S.; Tanik, U.J.; Carbone, J.N.; Eroglu, A. Applied Cyber-Physical Systems; Springer: New York, NY, USA, 2014. [Google Scholar]
- Zhang, K.; Jiang, B.; Shi, P. Observer-based integrated robust fault estimation and accommodation design for discrete-time systems. Int. J. Control 2010, 83, 1167–1181. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, Y.; Li, H. Fault Reconstruction and Fault-tolerant Control via Learning Observers in Takagi-Sugeno Fuzzy Descriptor Systems with Time Delays. IEEE Trans. Ind. Electron. 2015, 62, 3885–3895. [Google Scholar] [CrossRef]
- Li, Y.; Peng, L. Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts. Sensors 2018, 18, 731. [Google Scholar] [CrossRef] [PubMed]
- Alavi, S.M.M.; Saif, M.; Member, S. Fault Detection in Nonlinear Stable Systems over Lossy Networks. IEEE Trans. Control Syst. Technol. 2013, 21, 2129–2142. [Google Scholar] [CrossRef]
- Chen, W.; Chen, W.T.; Saif, M.; Li, M.F.; Wu, H. Simultaneous Fault Isolation and Estimation of Lithium-Ion Batteries via Synthesized Design of Luenberger and Learning Observers. IEEE Trans. Control Syst. Technol. 2014, 22, 290–298. [Google Scholar] [CrossRef]
- Li, Y.; Peng, L. Event-triggered sensor data transmission policy for receding horizon recursive state estimation. J. Algor. Comput. Technol. 2017, 11, 178–185. [Google Scholar] [CrossRef]
- Miskowicz, M. Event-Based Control and Signal Processing; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Xie, C.; Li, Y.; Xie, Y.; Wang, H.; Peng, L. On Kalman Filter for Stochastic System with Correlated Noises Based on Event-Triggered Sampling. In Proceedings of the China Control Conference, Chengdu, China, 27–29 July 2016; pp. 8330–8334. [Google Scholar]
- Shi, D.; Shi, L.; Chen, T. Event-Based State Estimation. A Stochastic Perspective; Springer: Berlin, Germany, 2016. [Google Scholar]
- Niu, Y.; Ho, D.W.C.; Li, C.W. Filtering For Discrete Fuzzy Stochastic Systems with Sensor Nonlinearities. IEEE Trans. Fuzzy Syst. 2010, 18, 971–978. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-Delta Concept: An Event-Based Data Reporting Strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Suh, Y.S. Send-on-delta sensor data transmission with a linear predictor. Sensors 2007, 7, 537–547. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M. On event-based state estimation. In Proceedings of the International Workshop on Hybrid Systems: Computation and Control, Rome, Italy, 28–30 March 2001; pp. 336–350. [Google Scholar]
- Miskowicz, M. Event-based sampling strategies in networked control systems. In Proceedings of the IEEE Workshop on Factory Communication Systems, Toulouse, France, 5–7 May 2014; pp. 1–10. [Google Scholar]
- Trimpe, S.; Campi, M.C. On the choice of the event trigger in event-based estimation. In Proceedings of the 1st International Conference on Event-Based Control, Communication and Signal Processing, Krakow, Poland, 17–19 June 2014; pp. 1–8. [Google Scholar]
- Li, Y.; Li, P.; Chen, W. An energy-efficient data transmission scheme for remote state estimation and applications to a water-tank system. ISA Trans. 2017, 70, 494–501. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Li, Y.; Peng, L. Design of Event-Triggered Fault-Tolerant Control for Stochastic Systems with Time-Delays. Sensors 2018, 18, 1929. [Google Scholar] [CrossRef] [PubMed]
- Socas, R.; Dormido, R.; Dormido, S. New control paradigms for resources saving: An approach for mobile robots navigation. Sensors 2018, 18, 281. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Lu, Q.; Hu, Y. Event-Based Communication and Finite-Time Consensus Control of Mobile Sensor Networks for Environmental Monitoring. Sensors 2018, 18, 2547. [Google Scholar] [CrossRef] [PubMed]
- Diaz-Cacho, M.; Delgado, E.; Barreiro, A.; Falcón, P. Basic send-on-delta sampling for signal tracking-error reduction. Sensors 2017, 17, 312. [Google Scholar] [CrossRef] [PubMed]
- Putra, I.; Brusey, J.; Gaura, E.; Vesilo, R. An event-triggered machine learning approach for accelerometer-based fall detection. Sensors 2018, 18, 20. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Liu, G.; Yan, H.; Cheng, B.; Lin, F. Trail-based search for efficient event report to mobile actors in wireless sensor and actor networks. Sensors 2017, 17, 2468. [Google Scholar] [CrossRef] [PubMed]
- Santos, C.; Martínez-Rey, M.; Espinosa, F.; Gardel, A.; Santiso, E. Event-based sensing and control for remote robot guidance: An experimental case. Sensors 2017, 17, 2034. [Google Scholar] [CrossRef] [PubMed]
- Acho, L. Event-Driven Observer-Based Smart-Sensors for Output Feedback Control of Linear Systems. Sensors 2017, 17, 2028. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Wang, Z.; Shen, B.; Alsaadi, F.E. Security-guaranteed filtering for discrete-time stochastic delayed systems with randomly occurring sensor saturations and deception attacks. Int. J. Robust Nonlinear Control 2017, 27, 1194–1208. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Q.; Li, P. Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks. Sensors 2018, 18, 321. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Shi, L.; Cheng, P.; Chen, J.; Quevedo, D.E. Jamming Attacks on Remote State Estimation in Cyber-Physical Systems : A Game-Theoretic Approach. IEEE Trans. Autom. Control 2015, 60, 2831–2836. [Google Scholar] [CrossRef]
- Zemouche, A.; Boutayeb, M. Observer Design for Lipschitz Nonlinear Systems: The Discrete-Time Case. IEEE Trans. Circuits Syst. II Express Briefs 2006, 53, 777–781. [Google Scholar] [CrossRef]
- Cao, Y.; Member, S.; Lin, Z.; Chen, B.M.; Member, S. An Output Feedback H∞ Controller Design for Linear Systems Subject to Sensor Nonlinearities. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2003, 50, 914–921. [Google Scholar] [CrossRef]
- Pan, Y.; Li, H.; Zhou, Q. Fault detection for interval type-2 fuzzy systems with. Neurocomputing 2014, 145, 488–494. [Google Scholar] [CrossRef]
- Wen, J.; Peng, L.; Kiong, S. Stochastic finite-time boundedness on switching dynamics Markovian jump linear systems with saturated and stochastic nonlinearities. Inf. Sci. 2016, 334–335, 65–82. [Google Scholar] [CrossRef]
- Wang, Z.; Ho, D.W.C.; Dong, H.; Gao, H. Robust Finite-Horizon H∞ Control for a Class of Stochastic Nonlinear Time-Varying Systems Subject to Sensor and Actuator Saturations. IEEE Trans. Autom. Control 2010, 55, 1716–1722. [Google Scholar] [CrossRef]
- Li, Q.; Shen, B.; Liu, Y.; Huang, T. Event-triggered H∞ state estimation for discrete-time neural networks with mixed time delays and sensor saturations. Neural Comput. Appl. 2016, 28, 3815–3825. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Z.; Han, Q.; Lam, H. Variance-Constrained Distributed Filtering for Time-Varying Systems With Multiplicative Noises and Deception Attacks over Sensor Networks. IEEE Sens. J. 2017, 17, 2279–2288. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Ho, D.W.C.; Wei, G. Distributed recursive filtering for stochastic systems under uniform quantizations and deception attacks through sensor networks. Automatica 2017, 78, 231–240. [Google Scholar] [CrossRef]
- He, S.; Liu, F. Fuzzy model-based fault detection for Markov jump systems. Int. J. Robust Nonlinear Control 2009, 19, 1248–1266. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y.; Du, J. Event-triggered state estimator for stochastic systems with unknown inputs. IET Signal Process. 2016, 11, 1–6. [Google Scholar] [CrossRef]
- STM32F103RC Instructions, STMicroelectronics. Available online: https://www.st.com/resource/en/datasheet/stm32f103rc.pdf (accessed on 30 November 2017).
- ESP8266 Instructions, Espressif Systems. Available online: https://www.espressif.com/en/support/download/overview (accessed on 30 November 2017).
- Park, P.; Coleri Ergen, S.; Fischione, C.; Lu, C.; Johansson, K.H. Wireless Network Design for Control Systems: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 978–1013. [Google Scholar] [CrossRef]
- Araujo, J.; Mazo, M.; Anta, A.; Tabuada, P.; Johansson, K.H. System architectures, protocols and algorithms for aperiodic wireless control systems. IEEE Trans. Ind. Inform. 2014, 10, 175–184. [Google Scholar] [CrossRef]
- Wang, X.; Lemmon, M.D. Self-triggered feedback control systems with finite-gain L2 stability. IEEE Trans. Autom. Control 2009, 54, 452–467. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Nonlinearity Probabilities | ||||||
|---|---|---|---|---|---|---|
| RMEE | 0.092 | 0.197 | 0.2176 | 0.2363 | 0.2501 | 0.2901 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, X.; Peng, L. An Event-Triggered Fault Detection Approach in Cyber-Physical Systems with Sensor Nonlinearities and Deception Attacks. Electronics 2018, 7, 168. https://doi.org/10.3390/electronics7090168
Li Y, Liu X, Peng L. An Event-Triggered Fault Detection Approach in Cyber-Physical Systems with Sensor Nonlinearities and Deception Attacks. Electronics. 2018; 7(9):168. https://doi.org/10.3390/electronics7090168
Chicago/Turabian StyleLi, Yunji, Xu Liu, and Li Peng. 2018. "An Event-Triggered Fault Detection Approach in Cyber-Physical Systems with Sensor Nonlinearities and Deception Attacks" Electronics 7, no. 9: 168. https://doi.org/10.3390/electronics7090168
APA StyleLi, Y., Liu, X., & Peng, L. (2018). An Event-Triggered Fault Detection Approach in Cyber-Physical Systems with Sensor Nonlinearities and Deception Attacks. Electronics, 7(9), 168. https://doi.org/10.3390/electronics7090168