1. Introduction
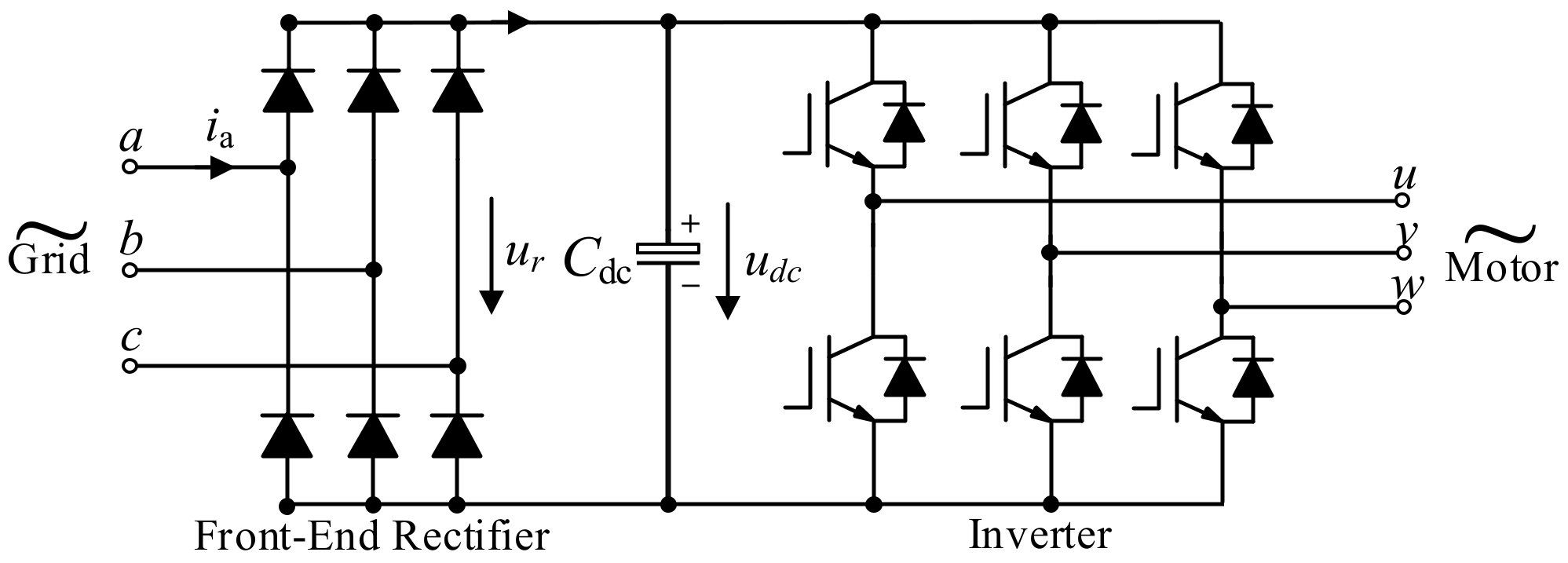
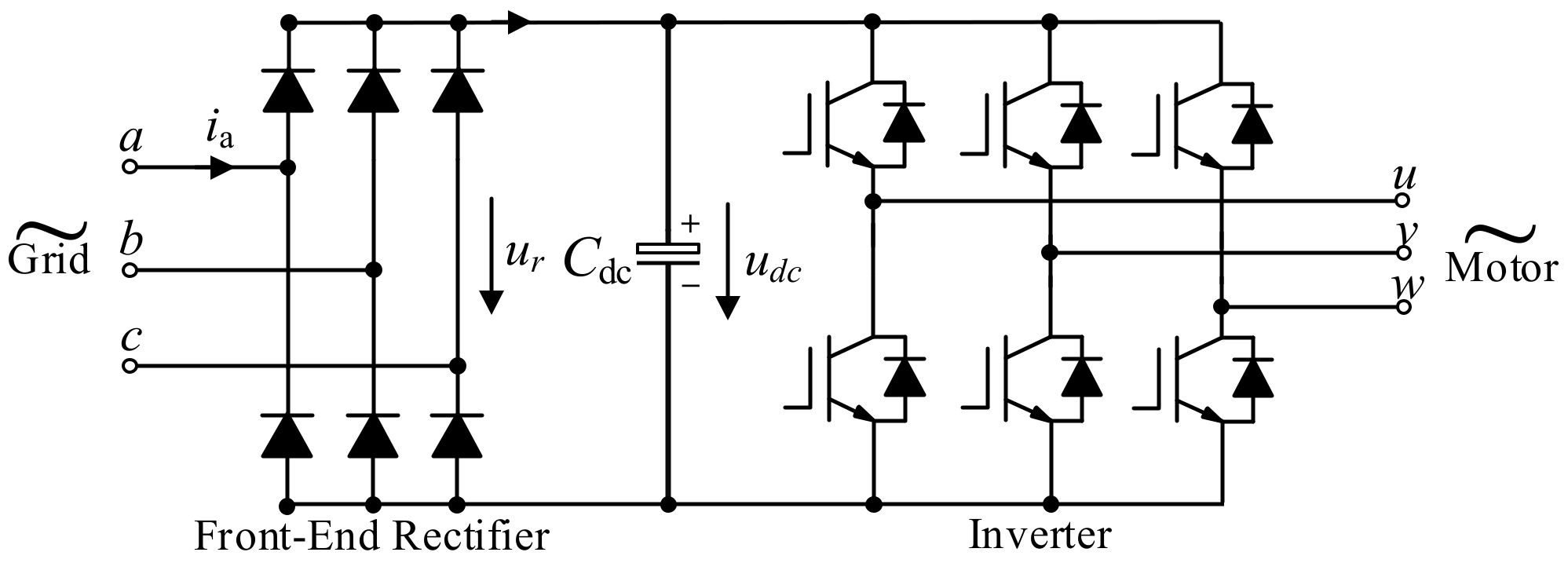
In many industrial applications, slim DC-link drives have become increasingly favored day by day. A classical driver consists of a 6-pulse diode bridge rectifier, an intermediate circuit with a big capacitor, an inductor, and an inverter. To maintain stable DC-link voltage, the DC-link capacitor needs to be carefully selected. Although the big size capacitor with large capacitance is at a higher cost and shorter lifetime, it has strong robustness against the stability problem. However, cost, lifetime, and loss must be taken into consideration for industrial applications. Thus, using a film capacitor as the slim DC-link capacitor in drivers is preferred, in spite of the stability problem. A diode rectifier based slim DC-link drive is shown in
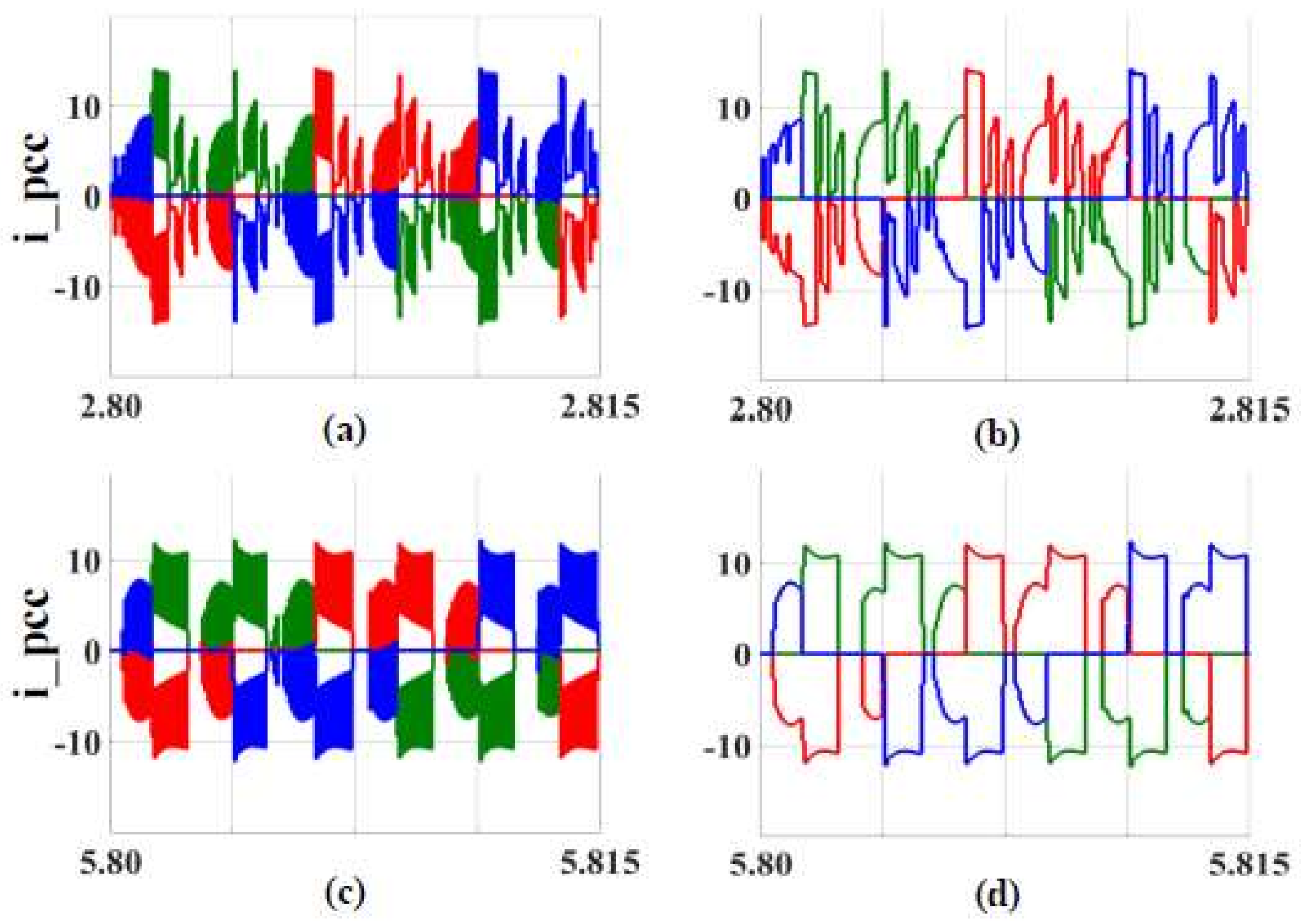
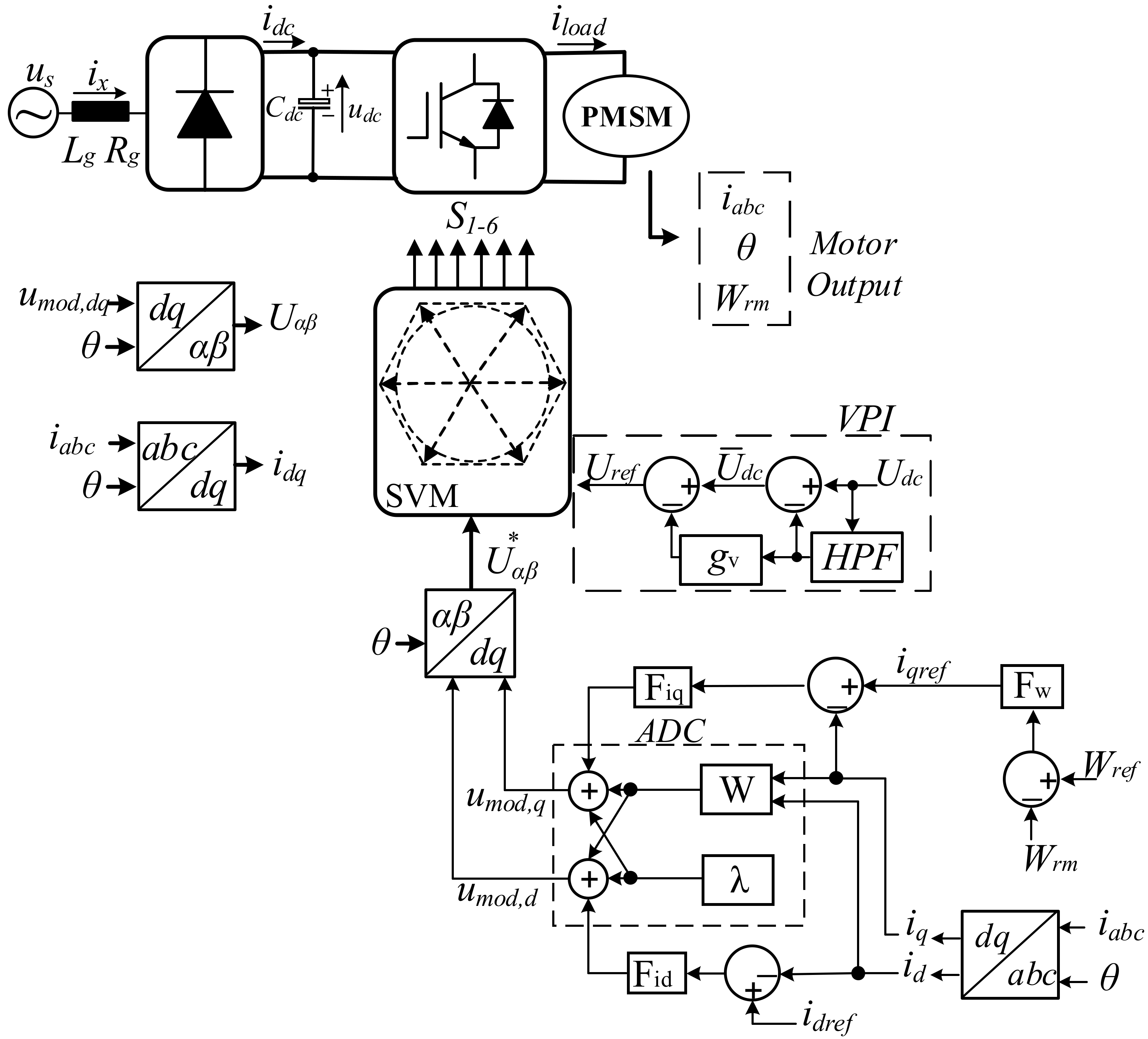
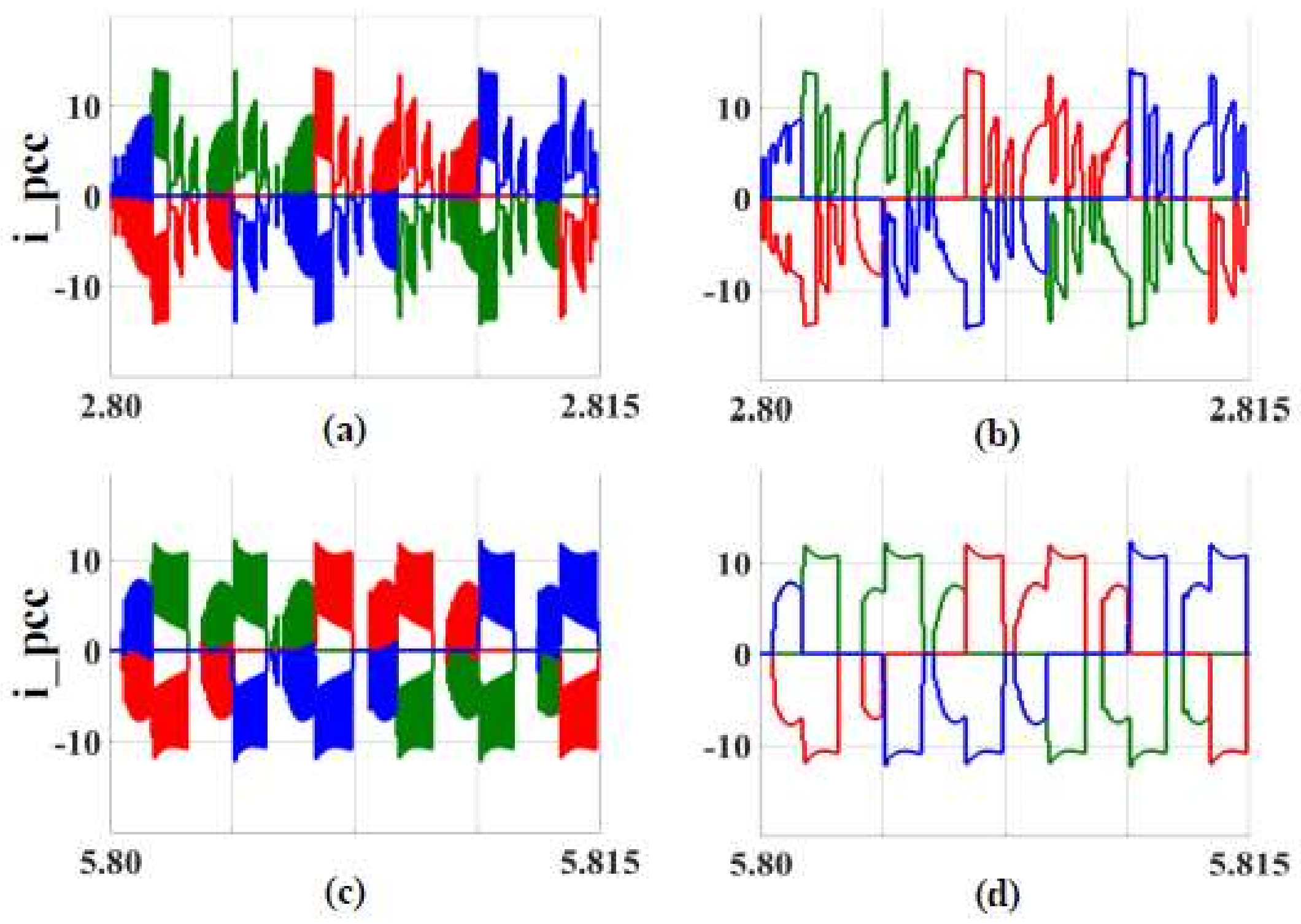
Figure 1. This grid-connected driver has a diode rectifier, a slim DC capacitor, and a 6-switches three-phase inverter. Additionally, point of common coupling (PCC) phase currents for stiff grid and weak grid are given in
Figure 2 at different operation speeds. The i_pcc simulated waveforms show that stiff grid and high operation speed (c) is the best current waveform. However, it can be improved with control methods, especially for weak grid conditions.
To solve the stability problem, Virtual Positive Impedance (VPI) based active damping control has been effectively implemented [
1,
2]. Active damping control for slim DC-link drive ensures that no extra passive damping component is needed. The negative impedance instability is described as:
where
PL is the load power,
vdc0 is the DC component of the DC-link voltage,
is the AC part of the DC-link voltage, and
vdc is the DC-link voltage [
1].
idc is the DC-link current,
is the AC part of the DC-link current, and
idc0 is the DC component of the DC-link current. In contrast to the case using the big capacitor [
3], the constant power load behavior of the motor with a slim-DC-link capacitor causes the larger ripple on the DC voltage. Both ripples on the DC-link voltage and the front-end current harmonics are higher when using a small capacitor [
4,
5]. In order to reduce the input current harmonics, VPI based active damping control decreases the ripple on the DC-link voltage [
1,
2,
3,
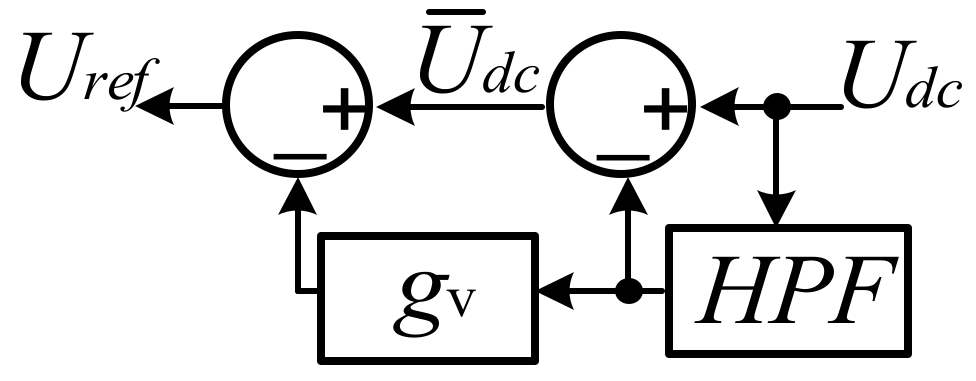
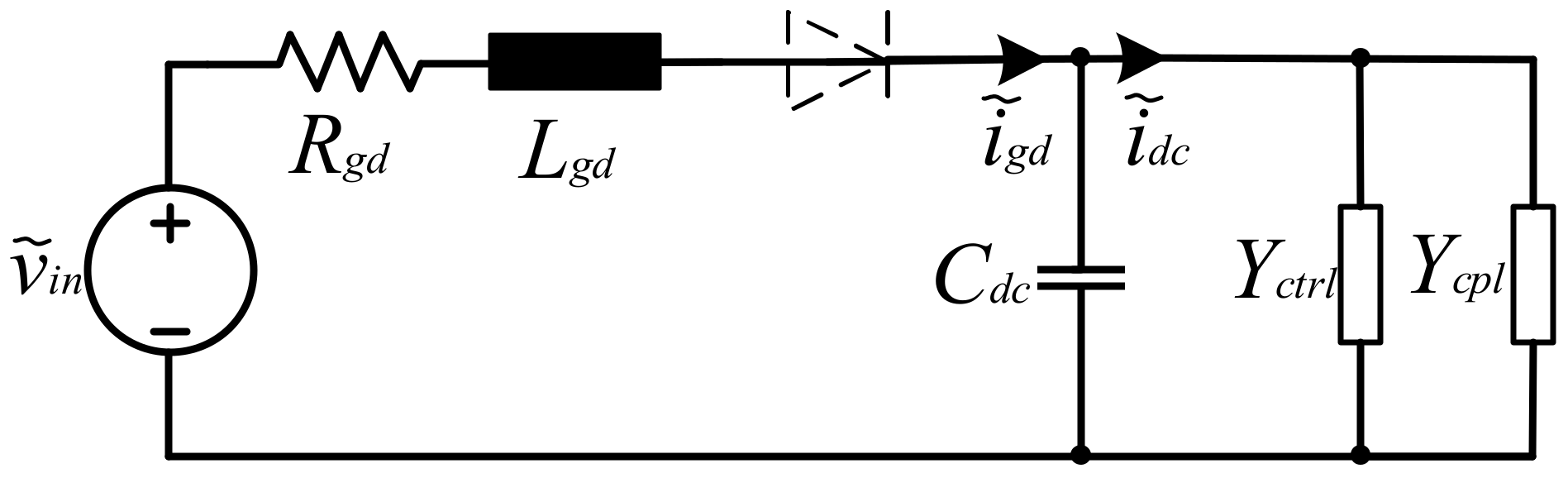
4]. A virtual positive impedance block diagram is illustrated in
Figure 3 [
1]. This model can be used for the generation of the DC-link voltage reference. In order to control the AC component of the DC-link voltage, the 1st-order High Pass Filter is represented by a high pass filter (HPF) block.
gv is the gain on the accompaniment of the DC-link voltage. In spite of the fact that VPI contains an HPF block, it resembles the 1st-order Low Pass Filter and harmonic detection block. Additionally, this block diagram can be used for detecting the harmonic [
5]. The harmonic detection is also ensured by the VPI method, providing the lower ripples on the DC-link voltage. Harmonic mitigation, harmonic cancellation, or generally a harmonic problem is an important issue for motor drivers [
6,
7]. This problem can deteriorate grid voltage quality, as well as the performance of both the driver and the load. Although it cannot be completely removed, it needs to be mitigated as much as possible. For this purpose, several control techniques and PWM techniques have been studied [
8,
9,
10].
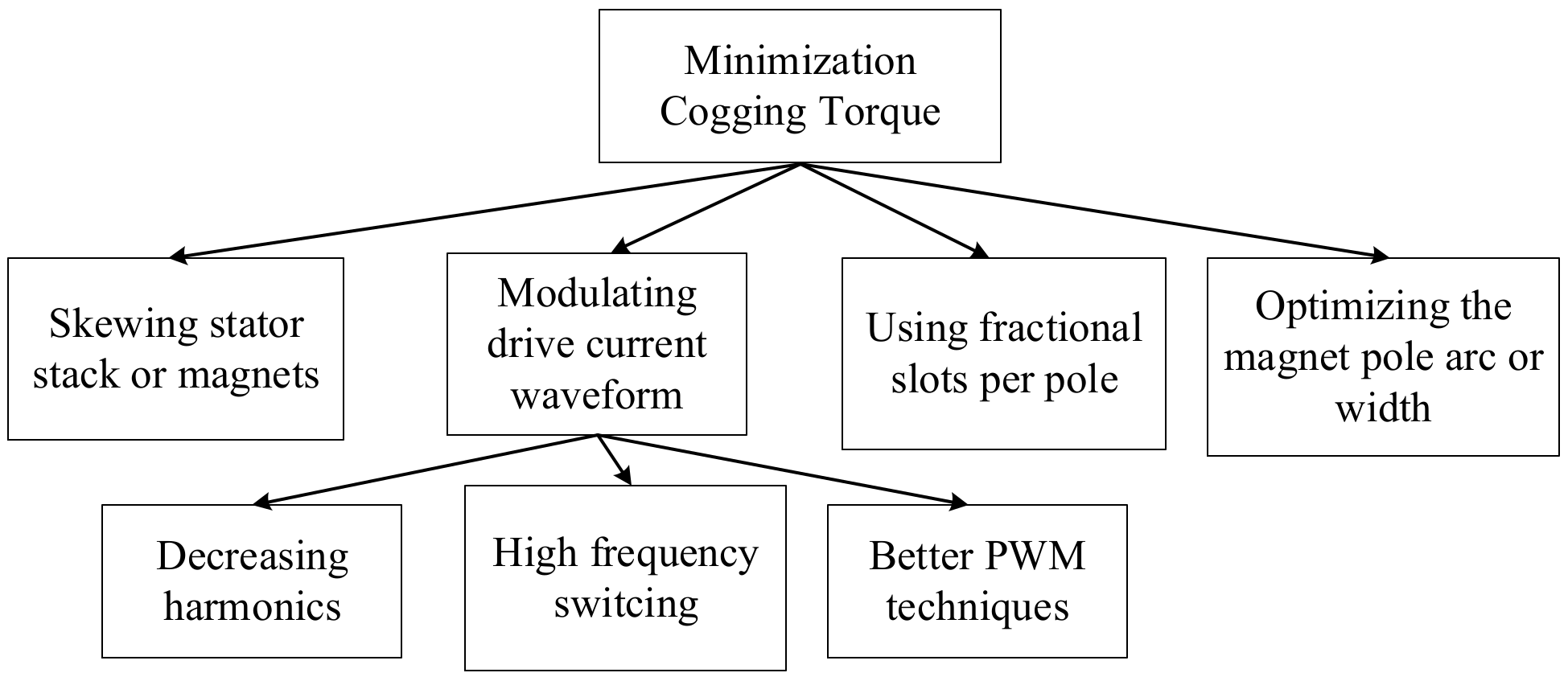
At the same time, not only ripple on the DC-link voltage on a small capacitor, but also a motor cogging torque due to interactions between core and magnet result in both grid input current harmonics and motor current harmonics. Owing to the harmonic problem, active damping control (ADC) and VPI can be used to decrease THD. Even through these methods achieve harmonics suppression, the cogging torque also needs to be solved by harmonic effect, because motor current harmonics cause the higher cogging torque [
11,
12,
13,
14,
15,
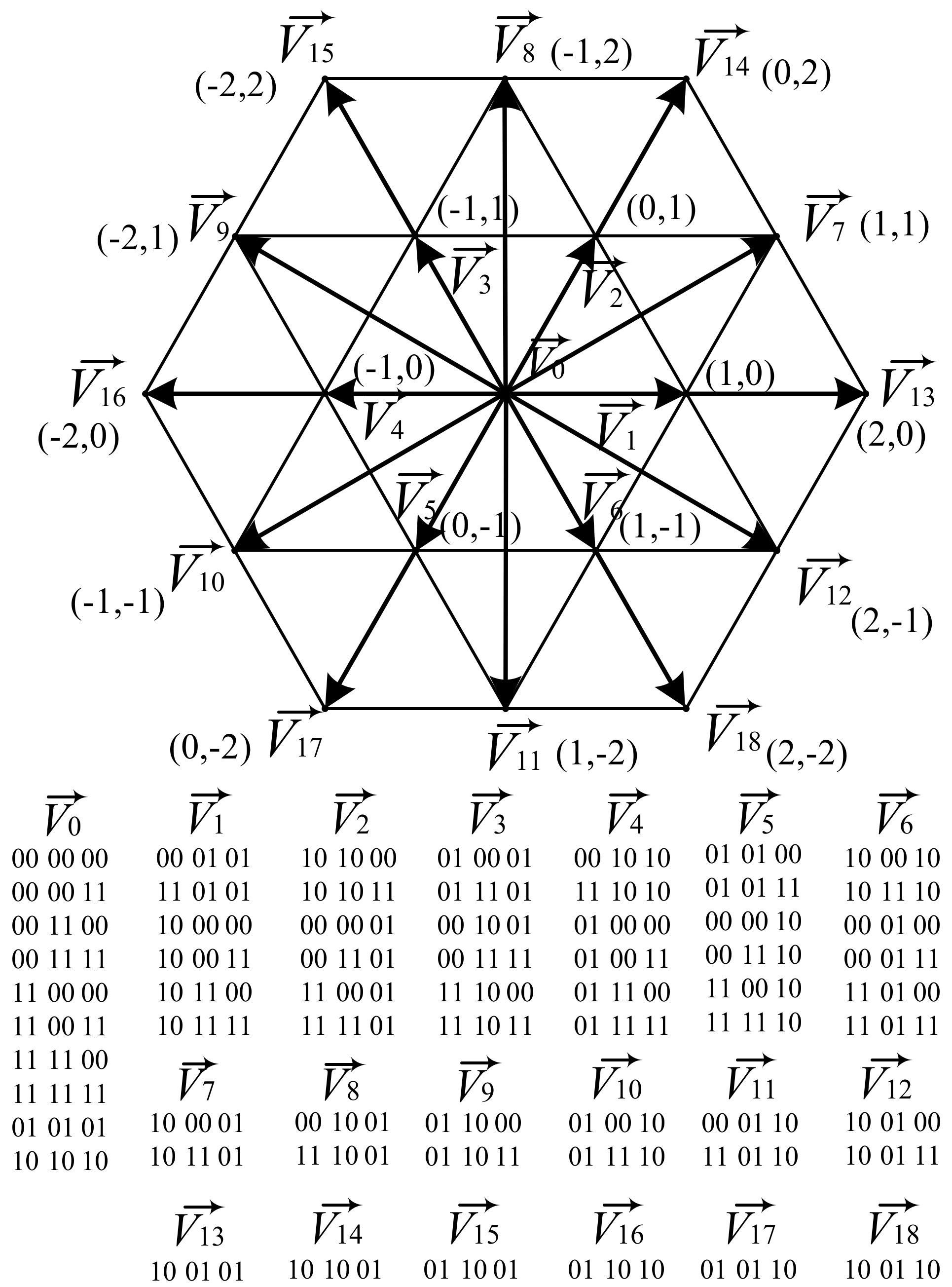
16]. When the 3DSVPWM aims to optimize switching waveforms, it can achieve a lower cogging torque. The algorithm of the 3DSVPWM was based on four steps. Firstly, the reference vector was transformed into 2D. In addition, the length of the reference vector was described according to the length of the basis vectors. Secondly, the closest three vectors were found. When they were detected, finding high–low values of the reference vector coordinates could be facilitated. Duty cycles were calculated in the third step. Lastly, the best switching states were selected when 2D coordinates are transformed to 3D coordinates [
9,
12].
In this study, the DC-link voltage, the grid input current THD, the VPI bode results, the cogging torque, and the THD of motor currents were simulated in MATLAB (R2016b, MathWorks, Natick, MA, USA), where four simulation models were developed: (1) Weak grid without VPI without 3DSVPWM (wOVPIwO3D), (2) weak grid with VPI without 3DSVPWM (wVPIwO3D), (3) weak grid with VPI with 3DSVPWM (wVPIw3D), and (4) stiff grid with VPI with 3DSVPWM (stiffwVPIw3D).
Simulation results of these models are compared and discussed.
Section 2 analyzes the interaction between the cogging torque and the current harmonic. The 3DSVPWM, the PMSM model, and the input admittance are described. Then, virtual positive impedance based active damping control is given in
Section 3. In
Section 4, the performance analysis of the DC-link current THD and the motor current THD of the slim DC-link capacitor is shown. In addition, the stability analysis, the control structure, and the control impedance
Yctrl are explained in the same section. Additionally, the simulation validation of the grid input current THD
i and the cogging torque are obtained. Lastly, the study is summarized in
Section 5.
3. Virtual Positive Impedance Based Active Damping Control
The parameters of the drive and the PMSM are given in
Table 1. Moreover, the sample period is Ts, the reference torque of 3 ph trapezoidal motor is Tm,
Cdc is the slim DC-link capacitor value, SCR is the short circuit ratio, and the stator resistive and inductive values are R and
Ld–
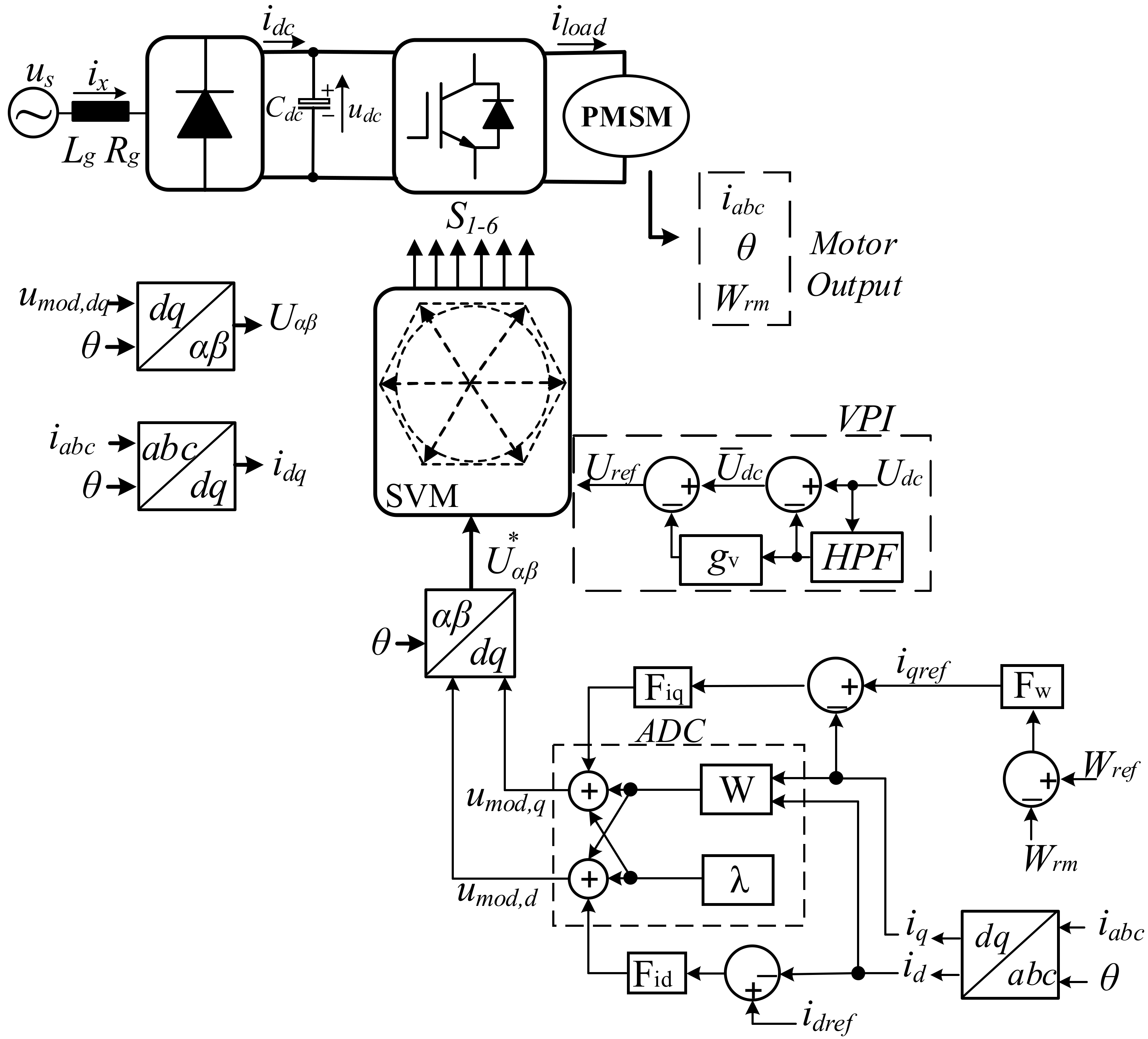
Lq. In addition, the current loop, the speed loop, and PWM block are shown in
Figure 7.
The control diagram includes the Space Vector Modulation (SVM) block, together with a VPI and an ADC block, the Park and the inverse Park transformation, the speed controller
Fω, the current controller
Fiq and
Fid together with the decoupling block
W. All the components are assumed as ideal. The power loss and the saturation effects in the drive system are neglected. The VPI is illustrated in
Figure 3;
Udc is the voltage feedback from the slim DC-link capacitor, which is used for voltage ripple elimination. Then,
Uref is the control reference of the
Vdc, which is calculated based on the reference voltages is 400 V, and the sum of the reversed voltage is −
Udc.
Furthermore, the speed closed-loop control and the current closed-loop control are shown in
Figure 7 in the
dq-frame.
W is the decoupling function block presented in Equation (19) and ω
r is the rotor speed. The current control equation is shown in Equation (20) and the speed control equation is shown in Equation (21) as follows:
4. Performance Analysis of The DC-Lınk Voltage THD and the Motor Current THD
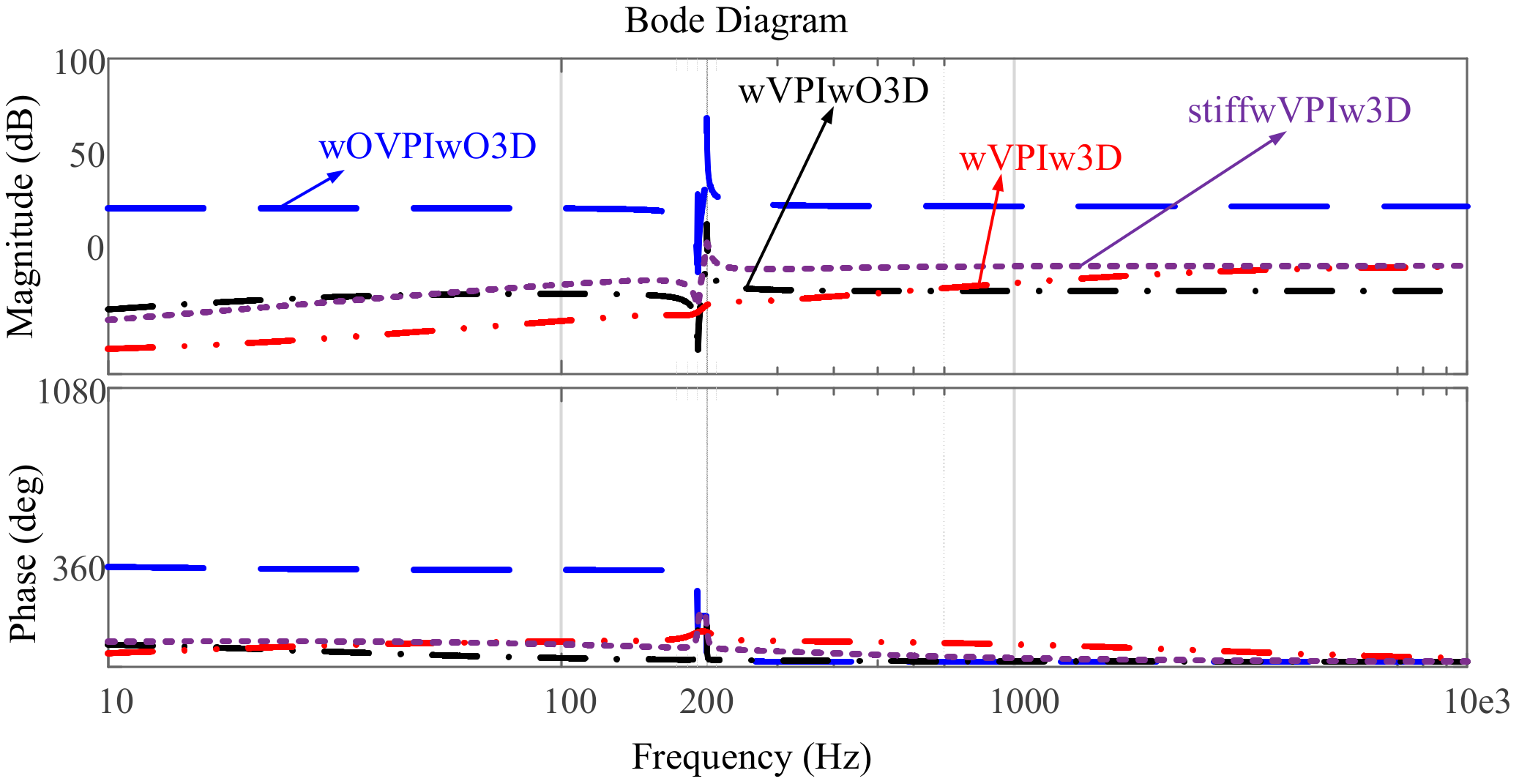
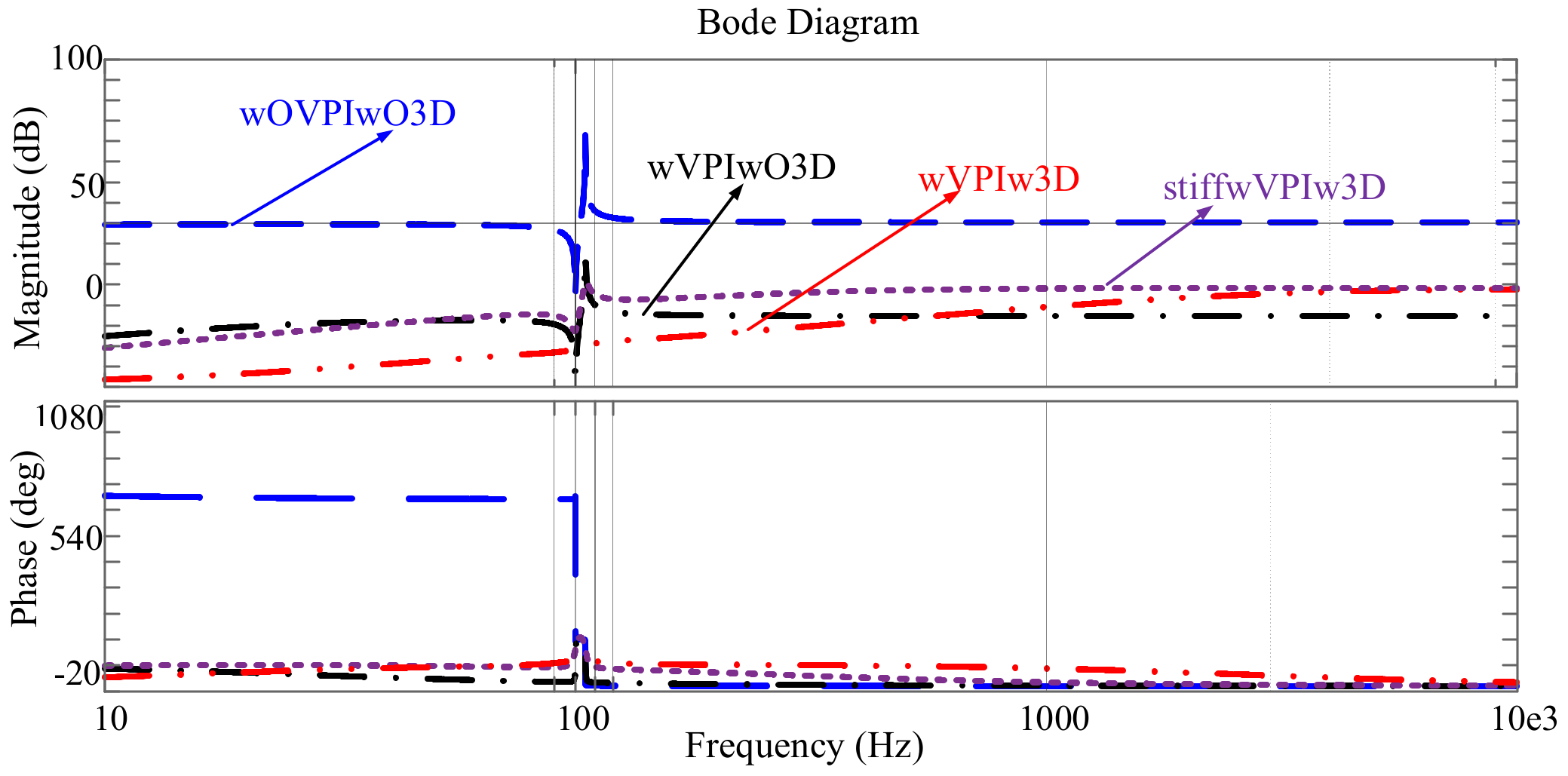
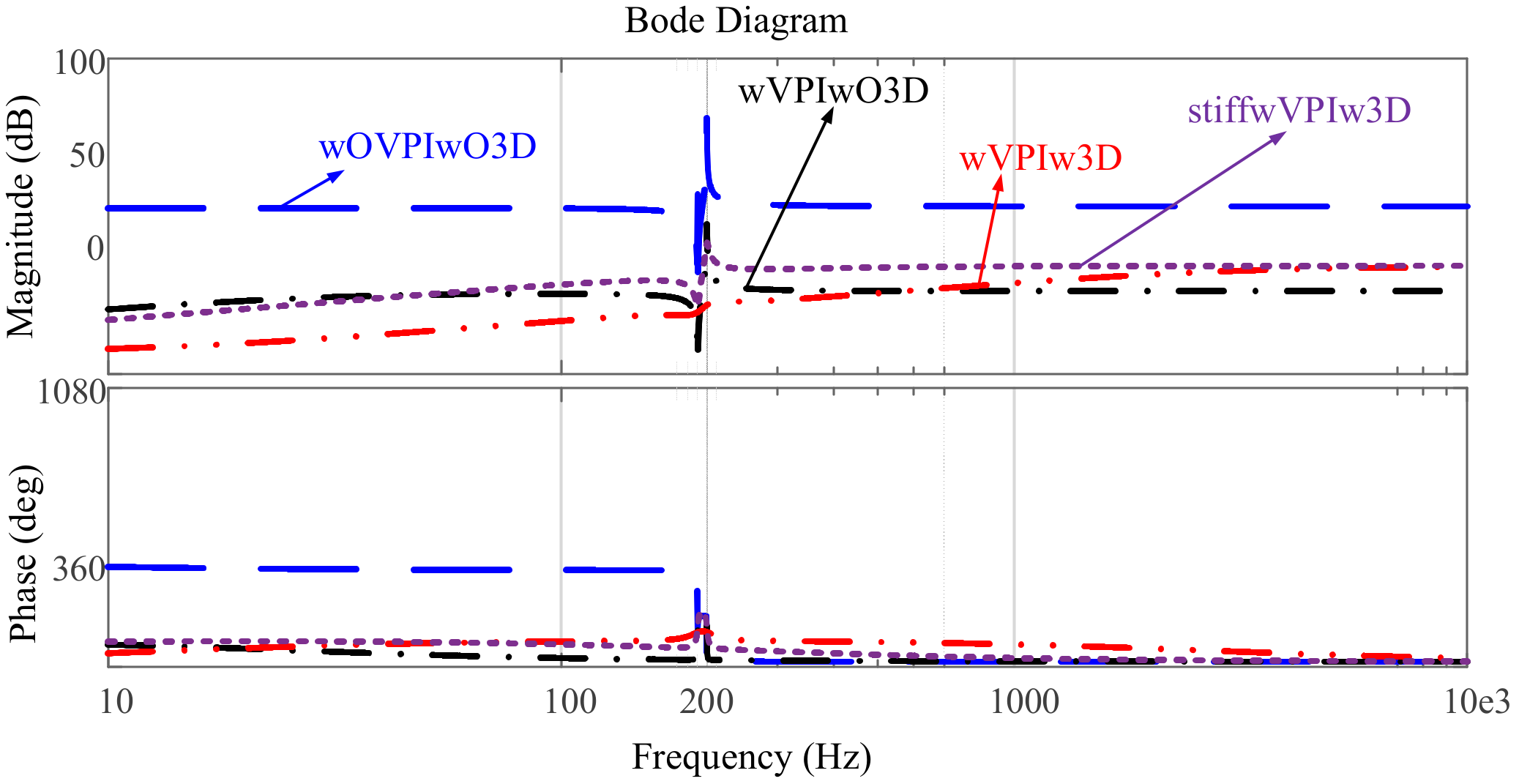
According to the Equation (18), bode diagrams of the 1/
Yctrl at 1500 rpm and 3000 rpm are given in
Figure 8 and
Figure 9.
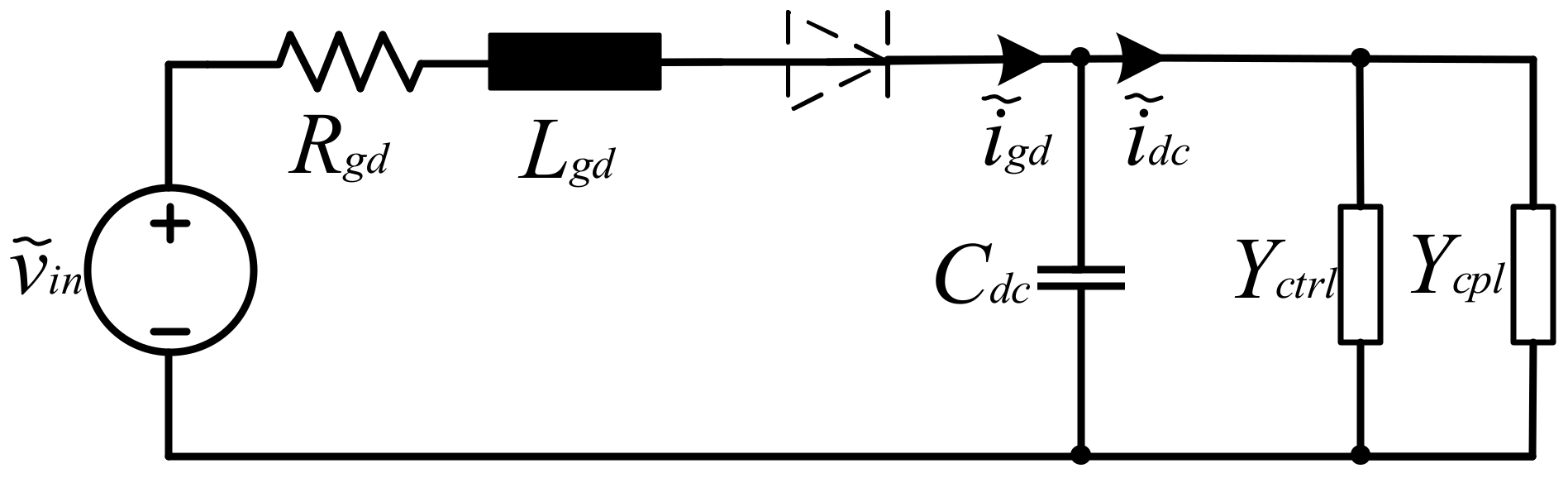
The Bode diagrams of the control impedance of the four cases can be seen at 1500 rpm and 3000 rpm. In the case of not using VPI based ADC and 3DSVPWM that is wOVPIwO3D (blue), the impedance magnitude behaves flat, but it does not reach zero. By contrast, in the case of the wVPIwO3D (black), wVPIw3D (red), and stiff wVPIw3D (purple), the magnitude of the control impedance becomes lower than that without active damping in the frequency range. The resonance is named as Negative-Impedance (NI) resonance due to the frequency character decided by NI at the constant power load (CPL) situation. Its impedance characteristic behaves as an inductive plus negative-resistive impedance during [10, 5000] Hz. This is helpful in suppressing the harmonics, caused by the resonance between Lgd and Cdc. In order to improve the THD (lower ripple on magnitude), impedance is increased at the current controller bandwidth. Increased impedance with the bandwidth of the current controller is helpful for suppressing the current harmonics (100 Hz and 200 Hz). Additionally, control impedance always behaves as positive-resistive plus inductive at high frequency while capacitive at low frequency. This positive-resistive characteristic helps to damp the system into a stable state.
4.1. The Performance Analysis of the DC-Link Voltage THD and the Motor Current THD
According to the VPI based ADC, the performance analysis of the DC-link voltage THD and the motor current THD is presented. Owing to the fact that the big size capacitor or RLC components have a higher cost and shorter lifetime, using the film capacitor as the slim DC-link capacitor in drivers can be a good alternative [
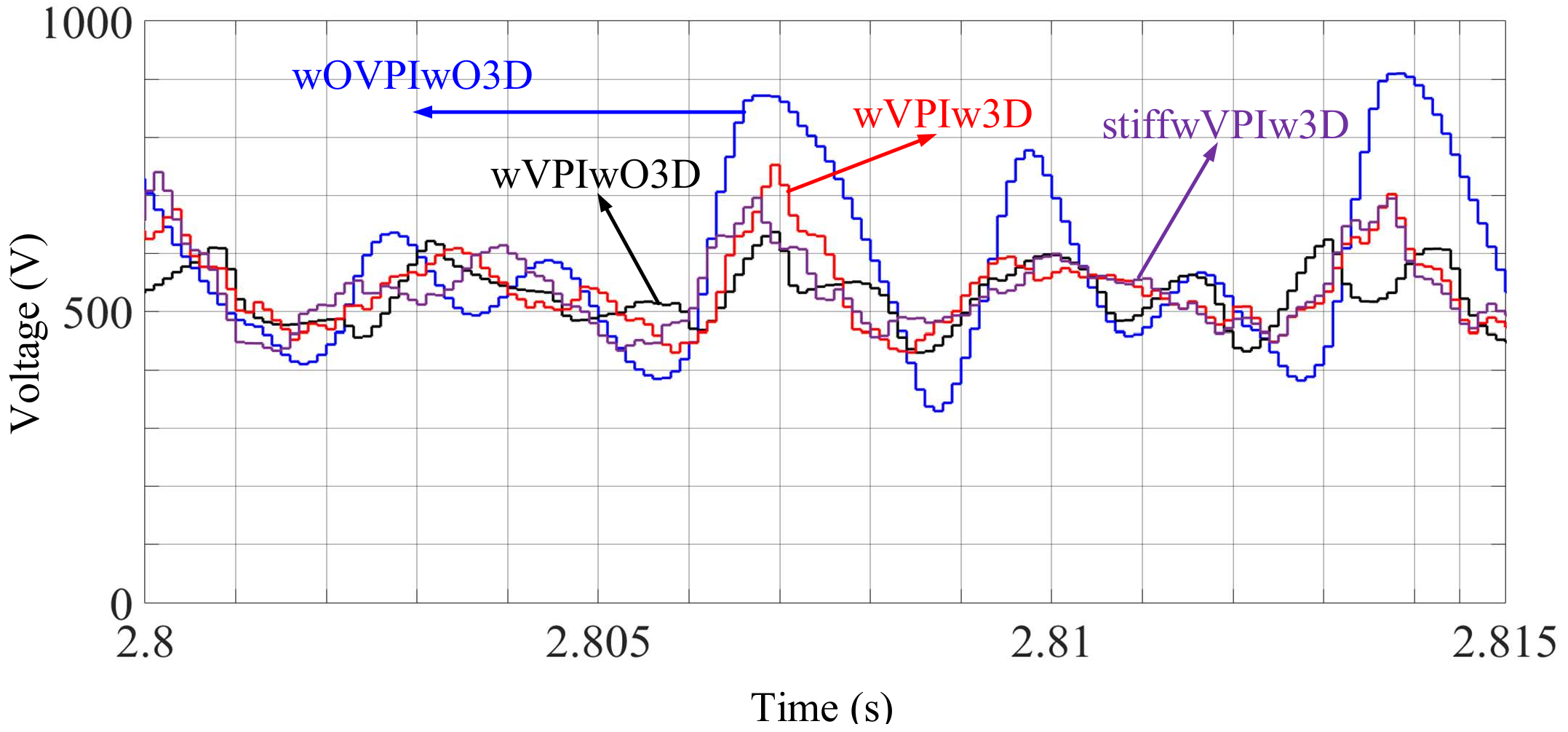
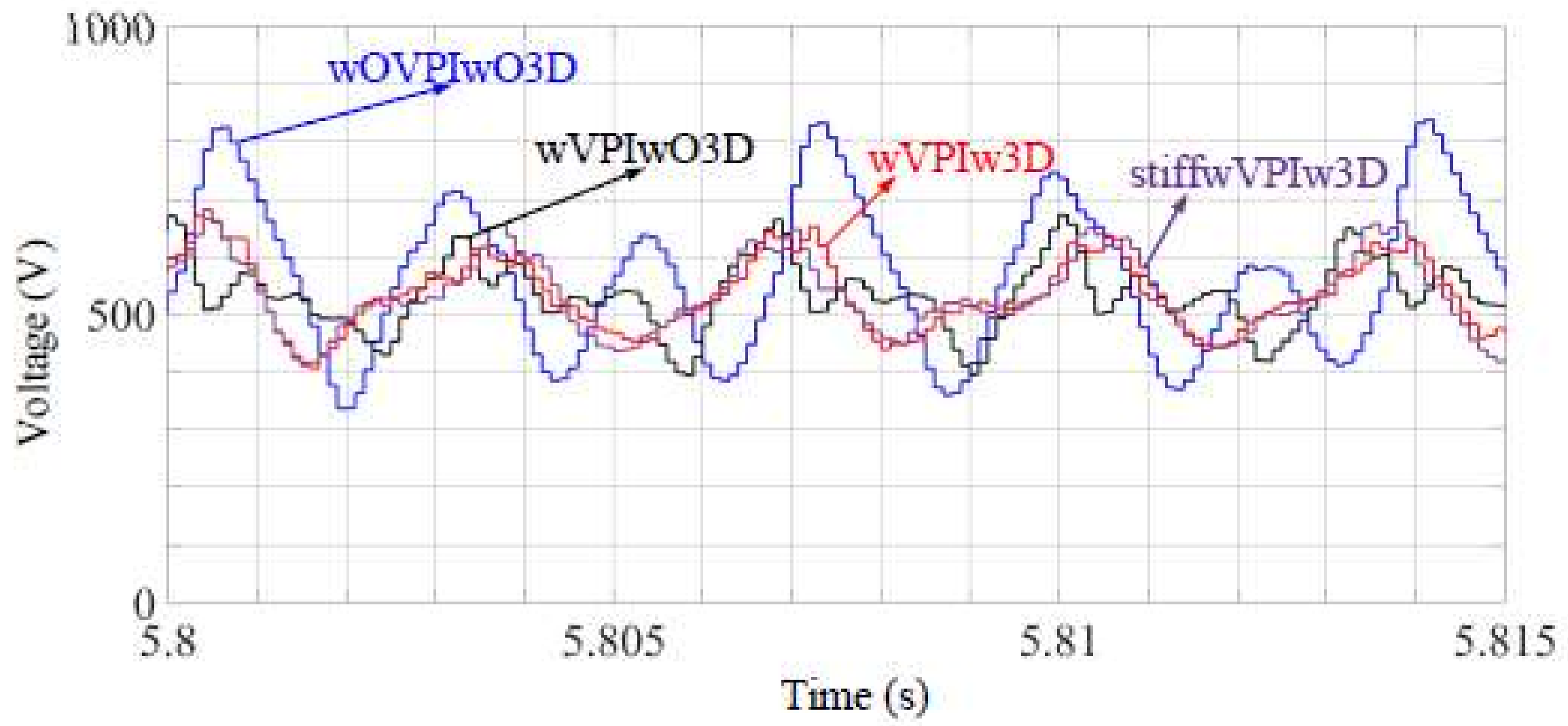
1]. In spite of the stability problem, the DC-link voltage of the slim capacitor is controlled well with VPI based ADC and 3DSVPWM. The DC-link voltage performances of the four cases are given below. The DC-link voltage when rotor speed is 1500 rpm is shown in
Figure 10 and the DC-link voltage when rotor speed is 3000 rpm is shown in
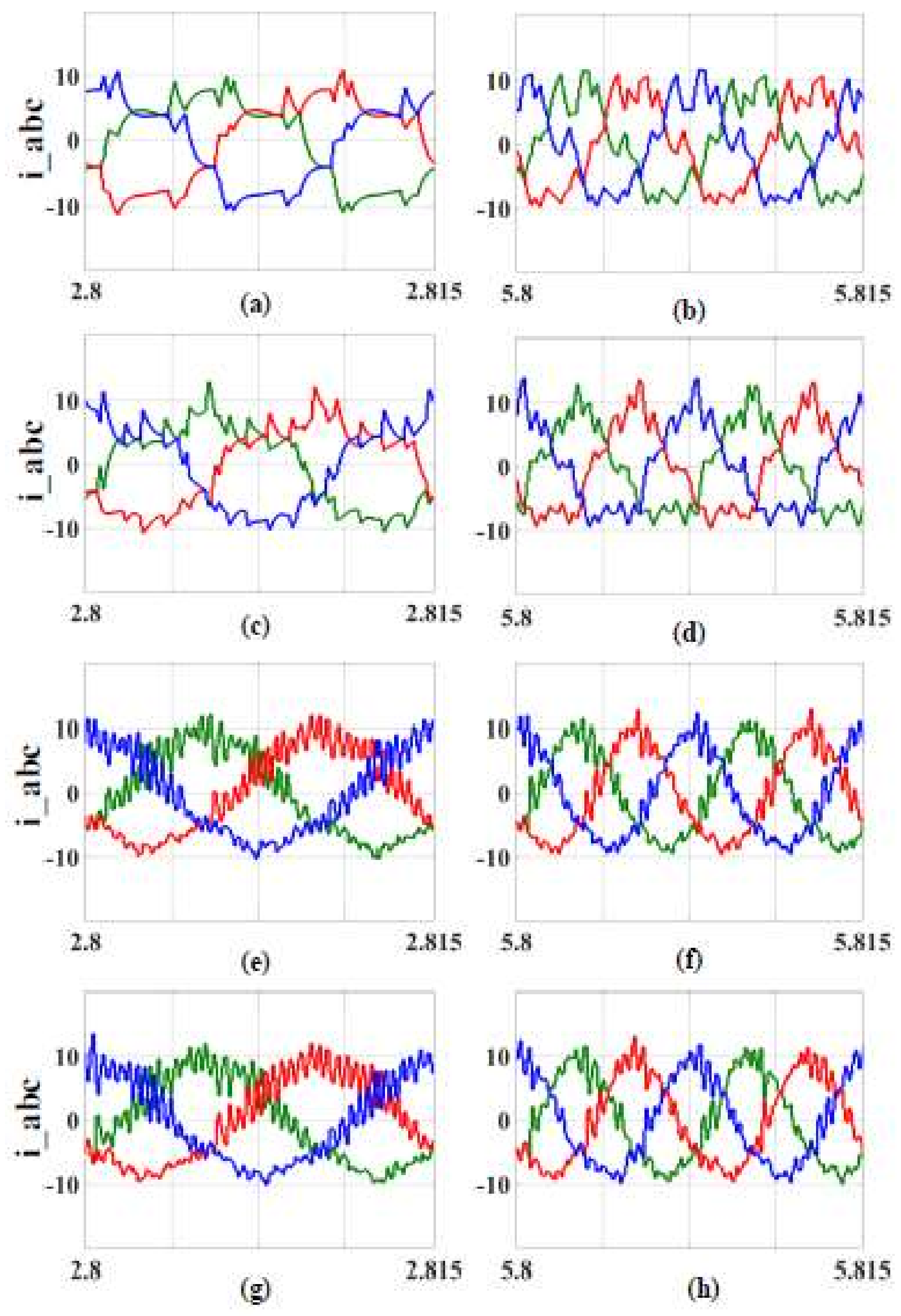
Figure 11. Firstly, the motor is operated at 1500 rpm from 0 s to 3 s, and then it is operated at 3000 rpm from 3 s to 6 s. However, time periods of the simulation are only 2.8–2.815 s and 5.8–5.815 s, because the results of the simulation are the same during 0s to 3 s and 3 s to 6 s. Thus, 2.8–2.815 s as TP1 (time period 1) and 5.8–5.815 as TP2 (time period 2) are used.
The ripples on the DC-link voltage when rotor speed is 1500 rpm and 3000 rpm are given in
Table 2.
In addition, the fast Fourier transform (FFT) results of the DC-link voltage when rotor speed is 1500 rpm and 3000 rpm are given in
Table 3.
As shown in
Table 2, the case of stiffwVPIwO3D has the best performance, as expected, with the lowest ripples on the DC-link voltage for both operation speeds as 82.1 V and 76.79 V. However, wVPIwO3D with a weak grid has the best THD results for both operation speeds according to
Table 3, as 13.15% at TP1 and 15.80% at TP2. Additionally, the ripples on DC-link voltage wVPIwO3D are obviously better than those on wVPIw3D (158.9–225.0 V and 144.2–169.6 V). The ripple on the DC-link voltage of the VPI based ADC with traditional SVPWM can oscillate. Lower ripples on DC-link voltage are obtained as 158.9 V at TP1 and 144.2 V at TP2. This means that using both the 3DSVPWM and the VPI based ADC does not provide better results of the ripple on DC-link voltage. Moreover, the FFT results of the motor current harmonics are displayed in
Table 4.
From
Table 4, the motor current harmonics of wVPIw3D with a weak grid or stiff grid are acceptable. When the 3DSVPWM is enabled, the motor current harmonics are suppressed effectively as 10.74% at TP1 and 12.07% at TP2 for Case 3 and 10.84% at TP1 and 11.95% at TP2 for Case 4.
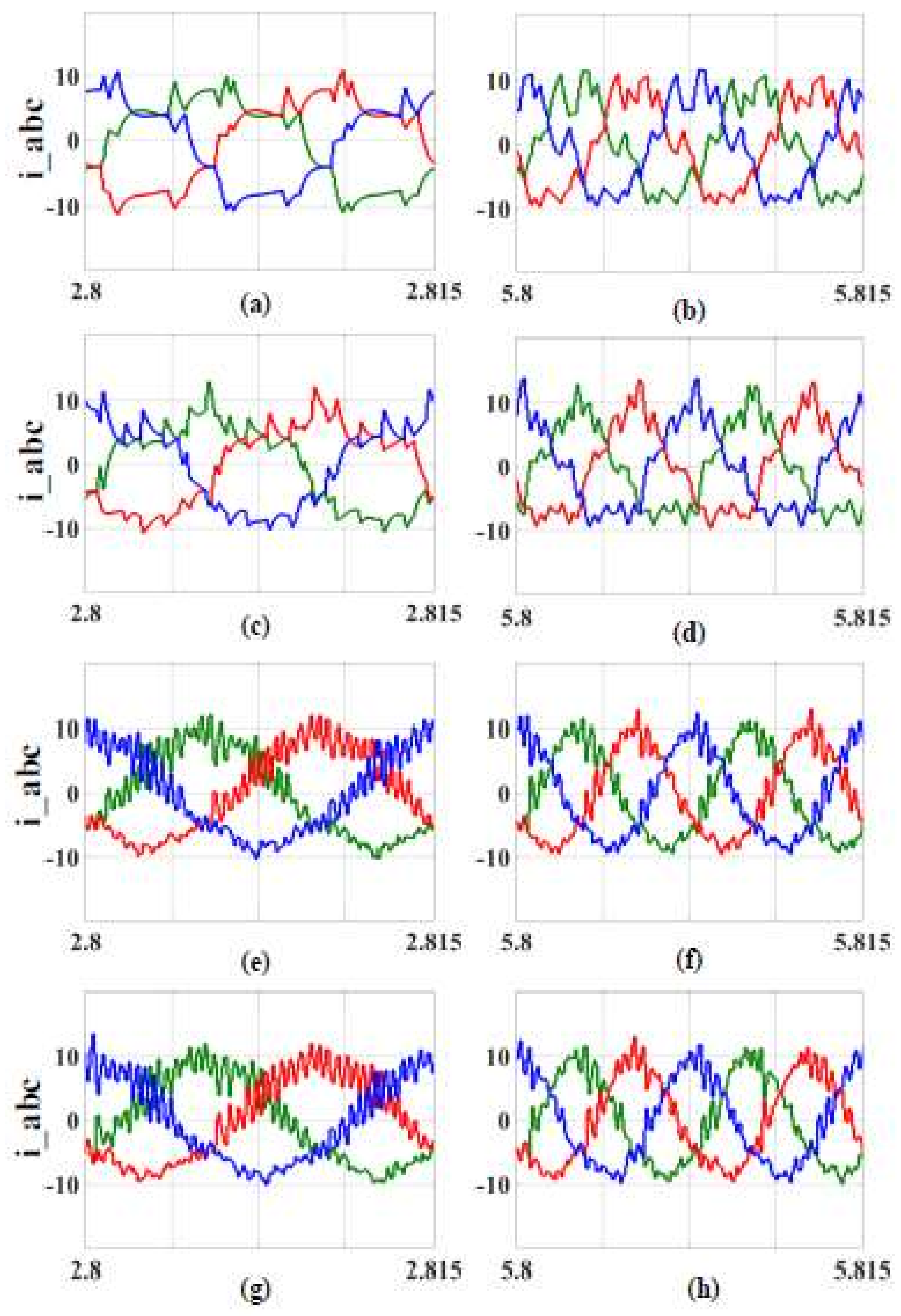
The motor current (i_abc) waveforms of 4 cases are given in
Figure 12. As seen there, Case 4 supplies the best results (g and h), thanks to virtual positive impedance-based active damping control and 3DSVPWM under the stiff grid. Then, Case 3 gives good results (e and f), thanks to virtual positive impedance-based active damping control and 3DSVPWM under the weak grid. Motor currents without 3DSVPWM means are seen in Case 2 (c and d). Lastly, motor currents with classical SVPWM without VPI based ADC means (a and b) are given in Case 1.
4.2. The Performance Analysis of the Grid Current THD and the Cogging Torque
Table 5 shows the analysis of the grid current THD according to the four cases of simulation results.
As shown in
Table 5, the grid input current FFT results are shown when the drive load is 3 kW. The FFT results of the grid input current of Case 1 are not as expected. When the 3DSVPWM is enabled, the THD
i decreases from 51.60% to 43.88% at TP2, and it also decreases from 54.53% to 47.74% at TP1. Although Case 4 has a better result than Case 3 at 3000 rpm, the result of Case 4 gives worse THD
i than Case 3 at 1500 rpm. The grid input current harmonics with the VPI based ADC and with the 3DSVPWM in Case 3 or Case 4 (with a weak grid or stiff grid) are acceptable. When the four cases are compared, the THD
i results of Case 3 and Case 4 are rather desirable for both operation speeds.
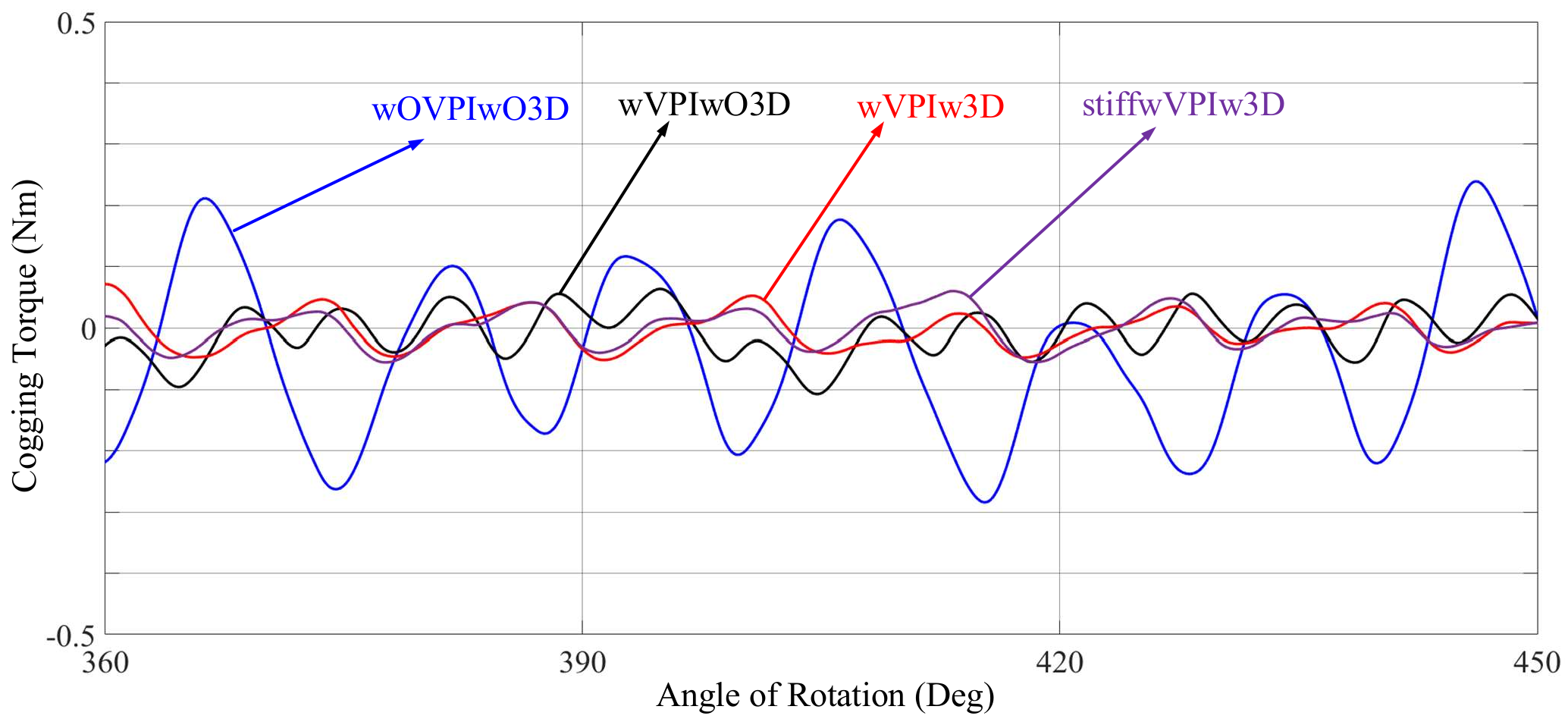
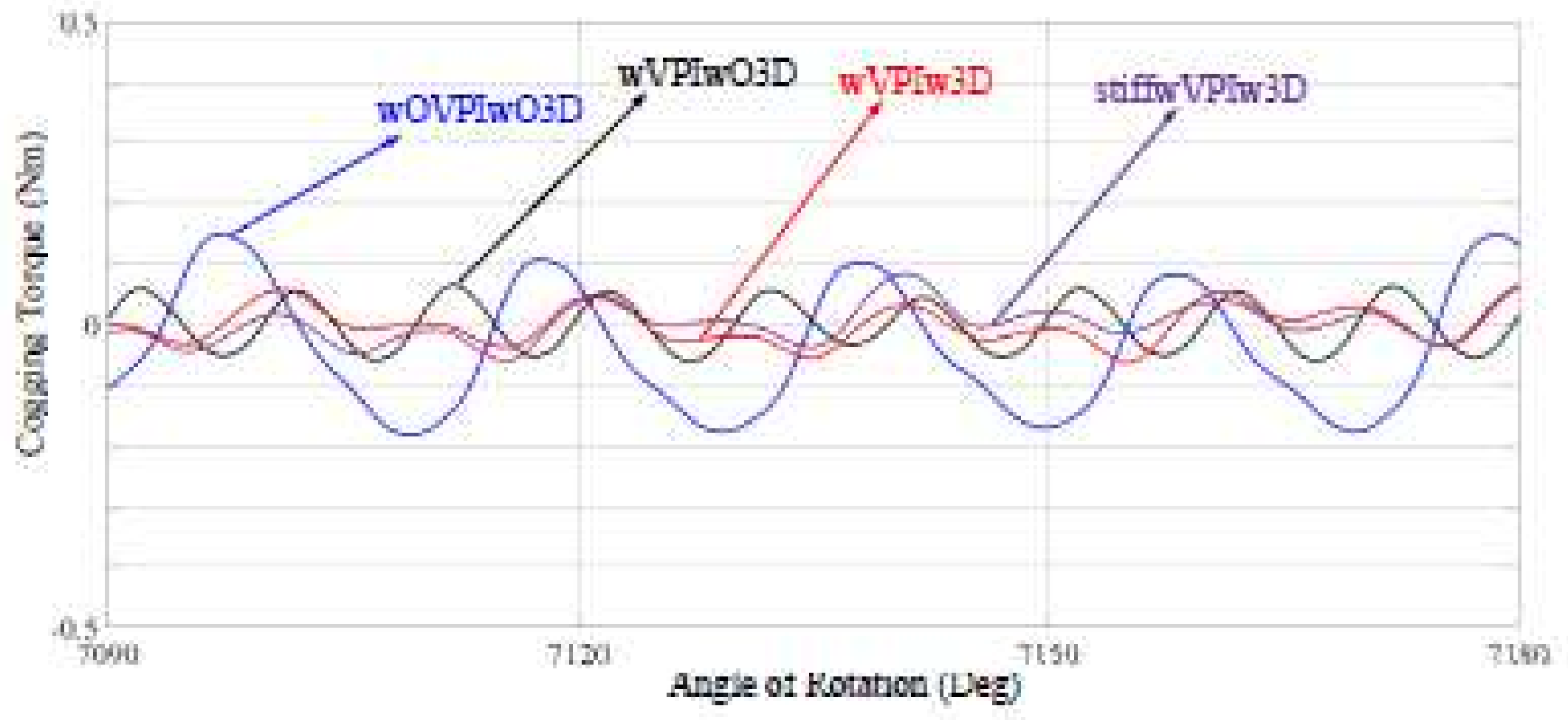
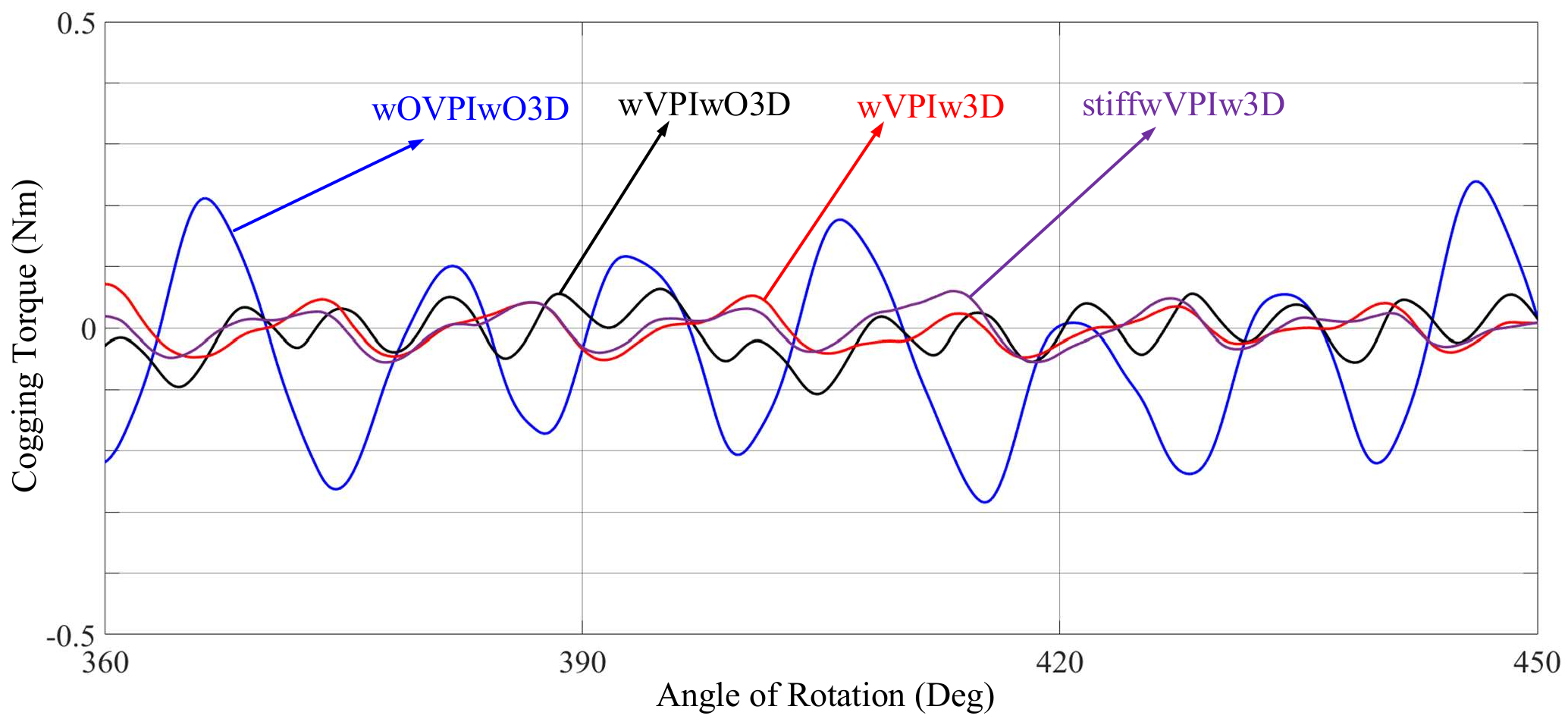
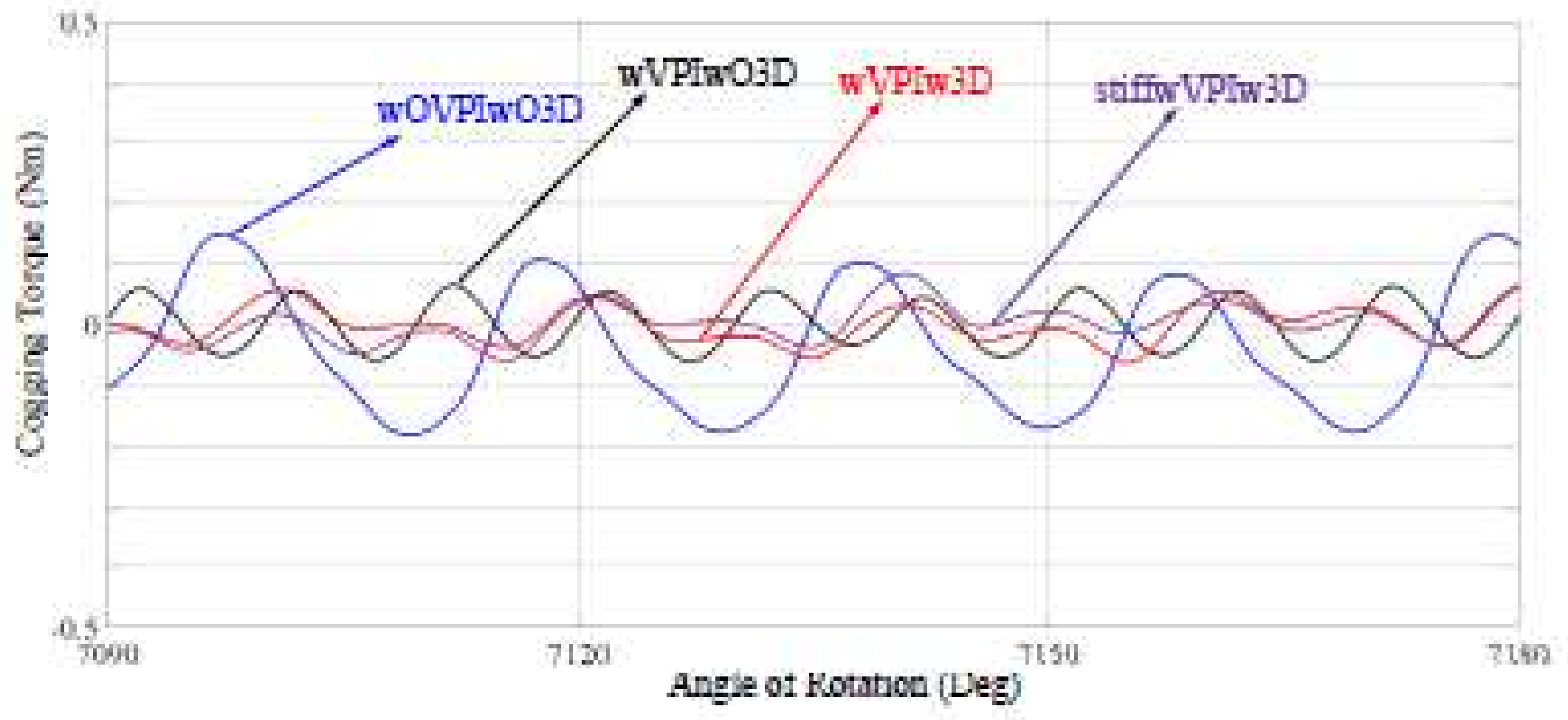
The cogging torque results are given in
Table 6. As seen in
Table 6, the cogging torque clearly decreases when adopting the 3DSVPWM. When Case 2 and Case 3 are compared, the cogging torque values get lower, from 0.25170 Nm to 0.15931 Nm at 3000 rpm and from 0.33270 Nm to 0.17871 Nm. Moreover, since the stiff grid is used, these results are 0.15285 Nm at 3000 rpm and 0.16720 Nm at 1500 rpm. In addition, the worst results are 0.28560 Nm at 3000 rpm and 0.44510 Nm at 1500 rpm from Case 1. These results are also seen in
Figure 13 and
Figure 14.
It can be seen that the cogging torque results are higher at a lower operation speed. The cogging torque results of Case 3 and Case 4 are more preferable than those of Case 1 and Case 2. Because the cogging torque is an important problem at low speed, the performance of the cogging torque in Case 3 and Case 4 are desired, especially at lower speed. At the same time, the cogging torque results of Case 3 and Case 4 at higher speed are better than those of the other cases. When both results in the tables and the figures are compared under either a weak or stiff grid, the adoption of the VPI based ADC and the 3DSVPWM together gives better results. The VPI based ADC ensures better harmonics, using a more advanced modulation technique, like 3DSVPWM (0.17871–0.15931 Nm and 0.16720–0.15285 Nm). Although the ripples on the DC-link voltage of the wVPIwO3D (Case 2) are lower without 3DSVPWM, the wVPIw3D (Case 3) and the stiffwVPIw3D (Case 4) are able to better suppress the grid current THD, the motor current THD, and the cogging torque.
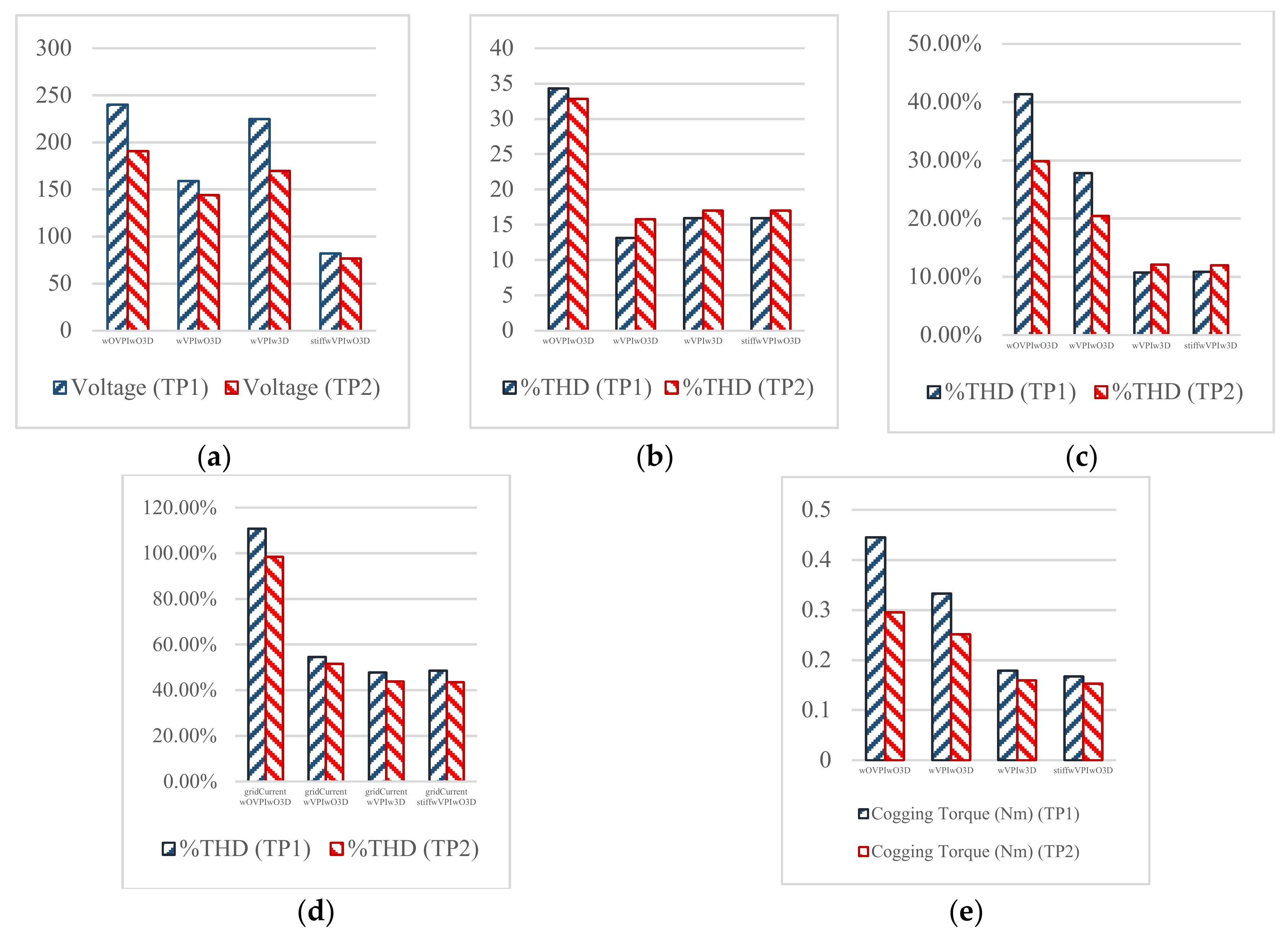
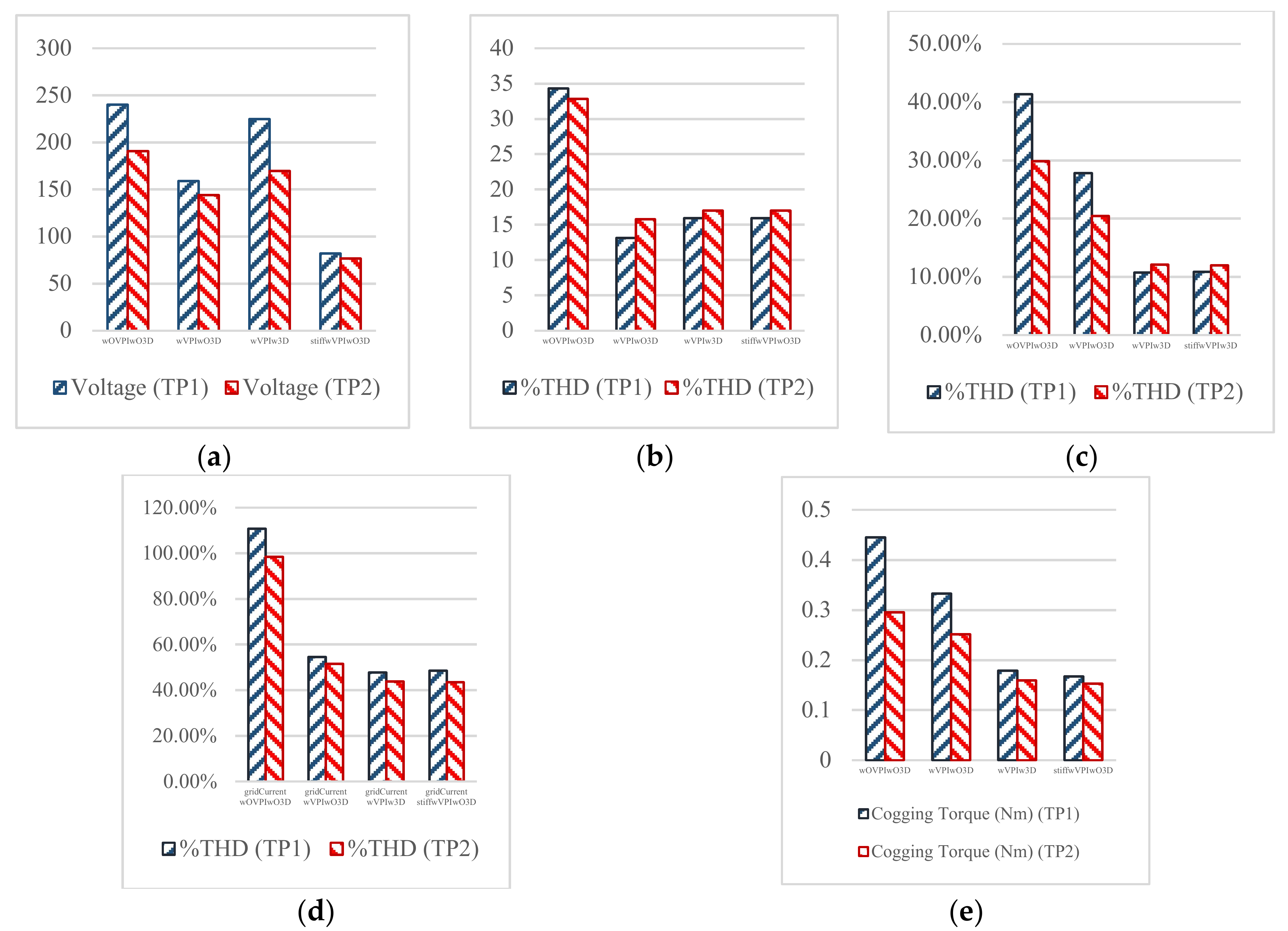
After the results are obtained, all of them are given in
Figure 15.
The performance difference between cases is given in
Figure 15. In this figure, the ripples of the DC-link voltage, the FFT results of the DC-link voltage, the FFT results of the motor current, the grid input current FFT results, and the cogging torque results are illustrated as bar graphics.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}