Synchronous Reference Frame Repetitive Control of a Single-Phase Three-Level Dual-Buck Photovoltaic Inverter


Abstract
1. Introduction
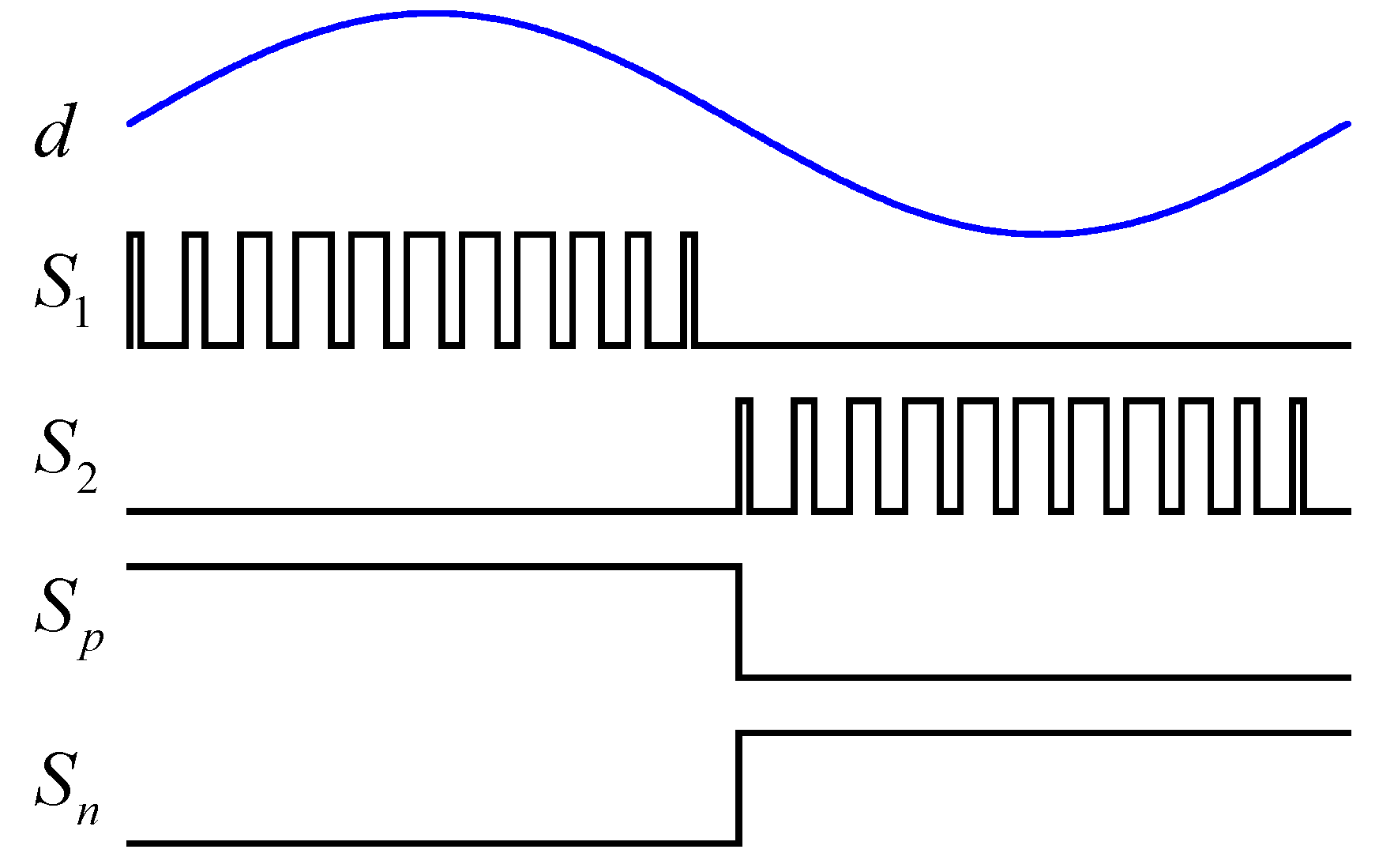
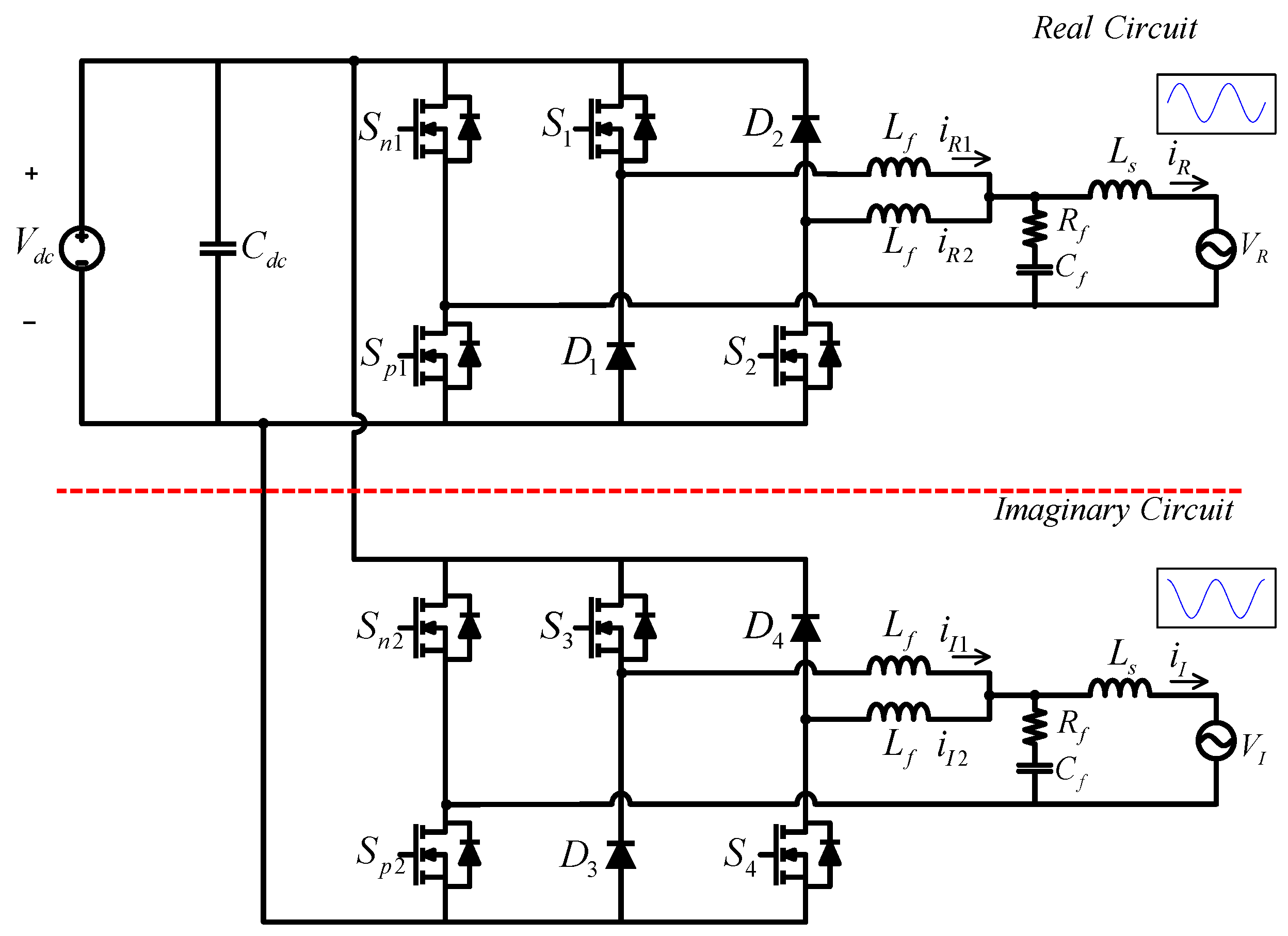
2. Circuit Structure and Control Strategy of DBI
2.1. DQ Rotating Frame Concept
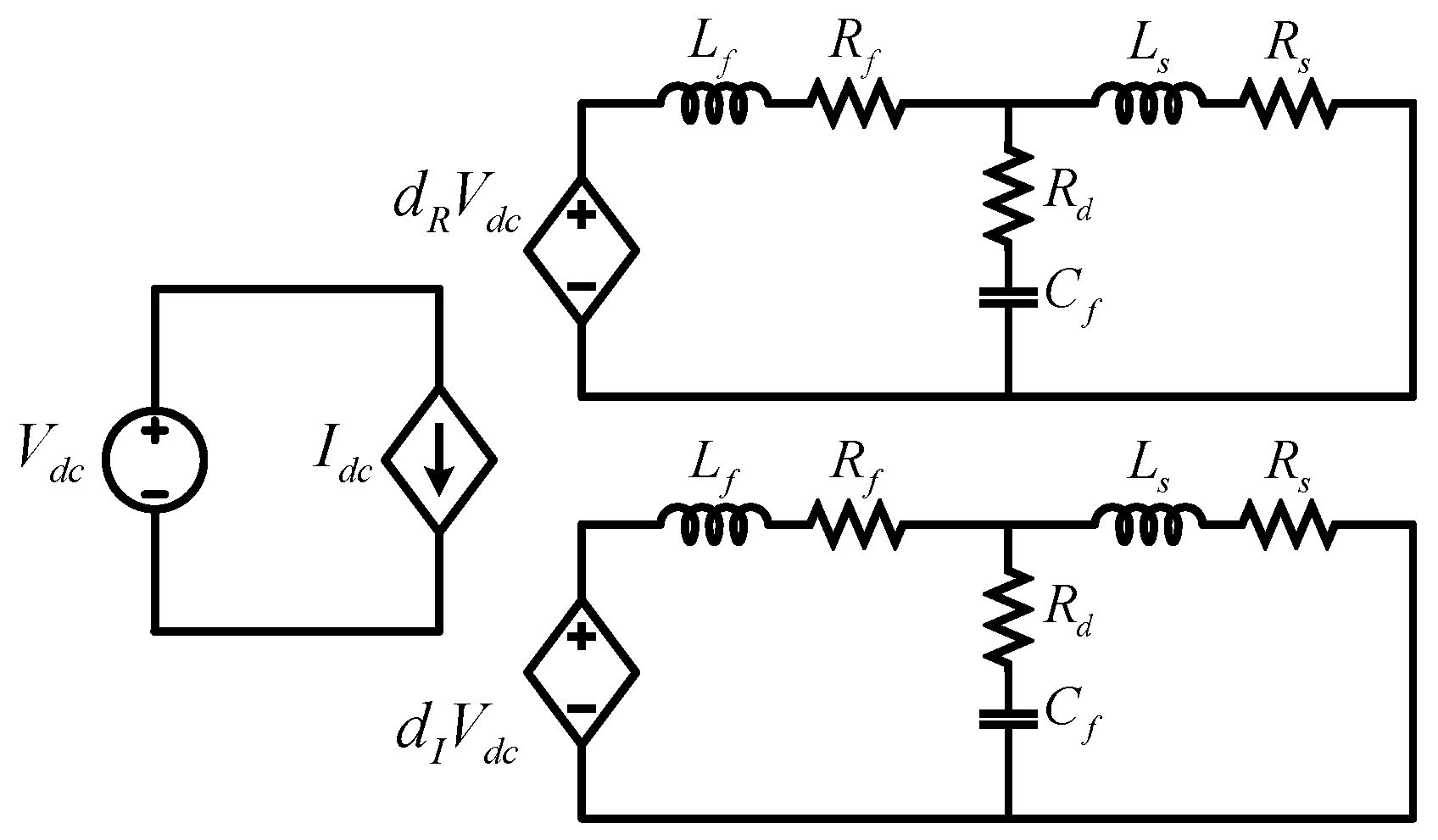
2.2. Average and DQ Models of the Single Phase DBI
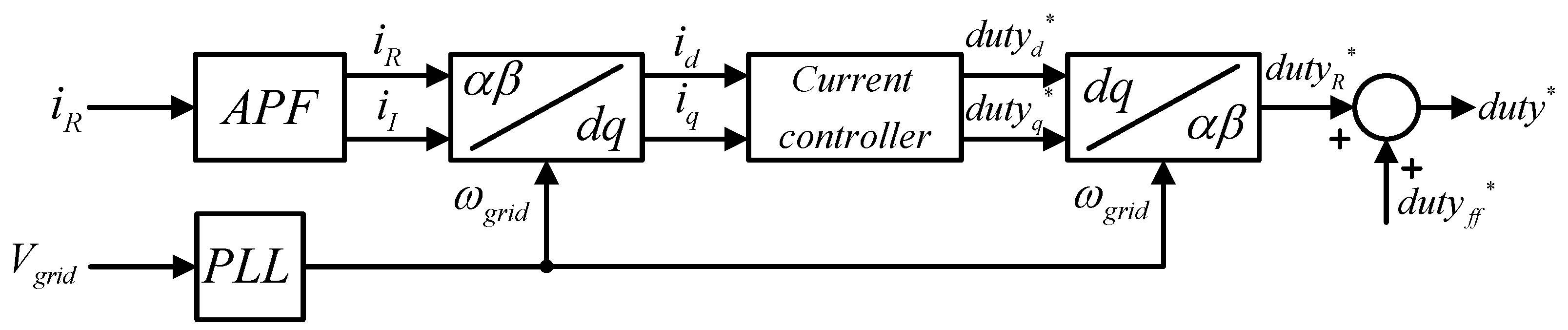
2.3. d–q Current Controller Design
3. Even Harmonics Repetitive Controller Design
3.1. Even Harmonics Repetitive Controller
3.2. Repetitive Controller Design
4. Simulation and Experimental Result
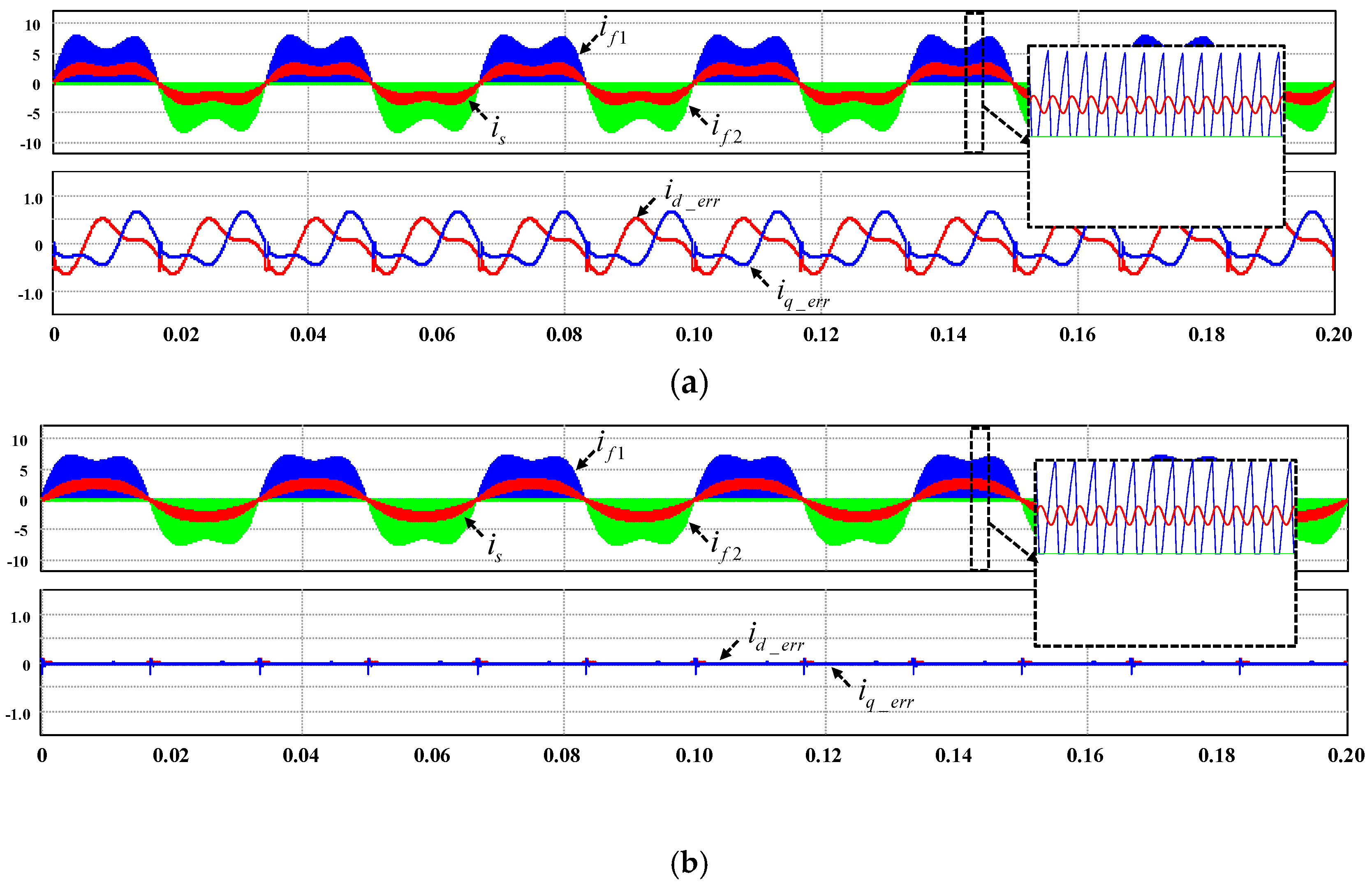
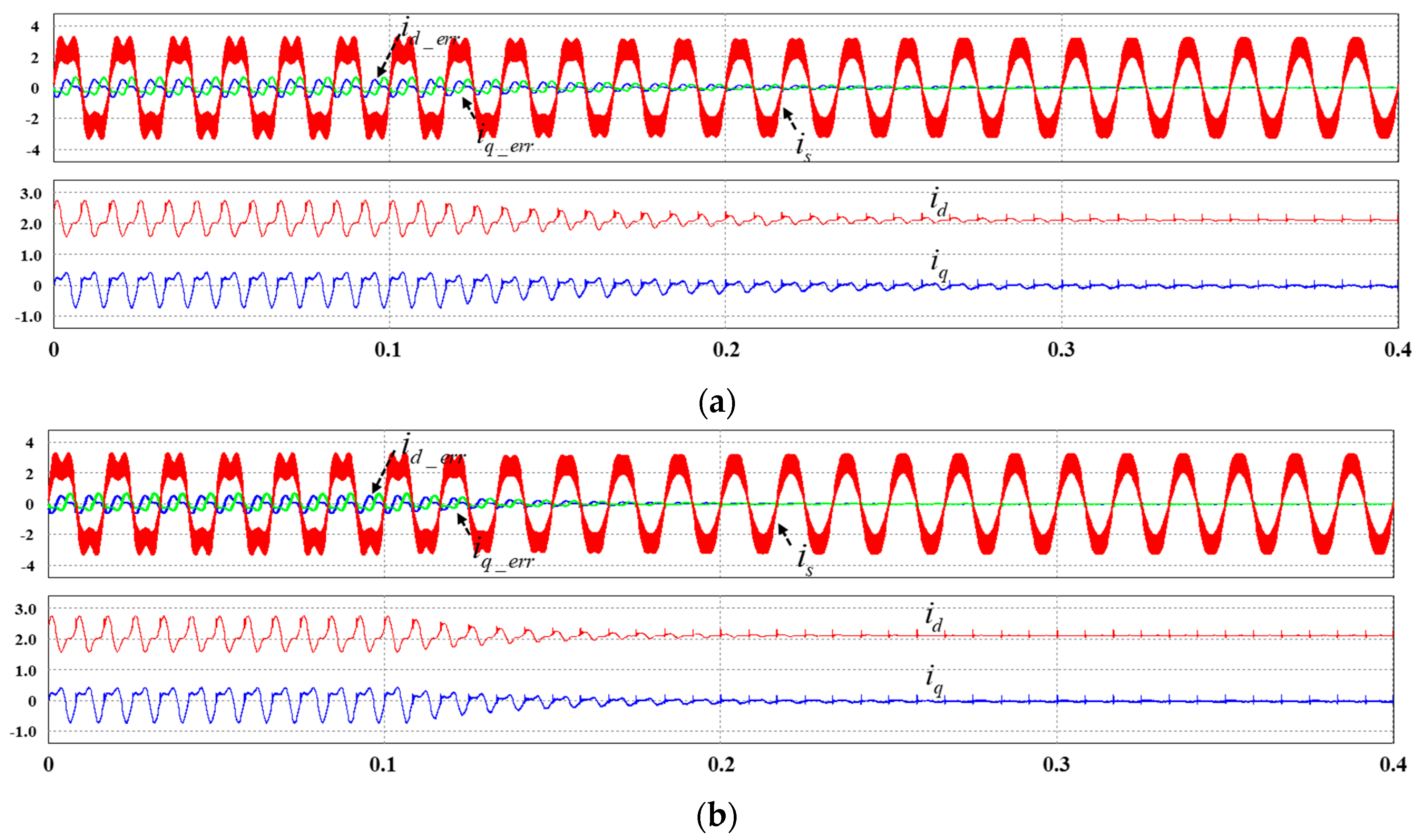
4.1. Simulation Results
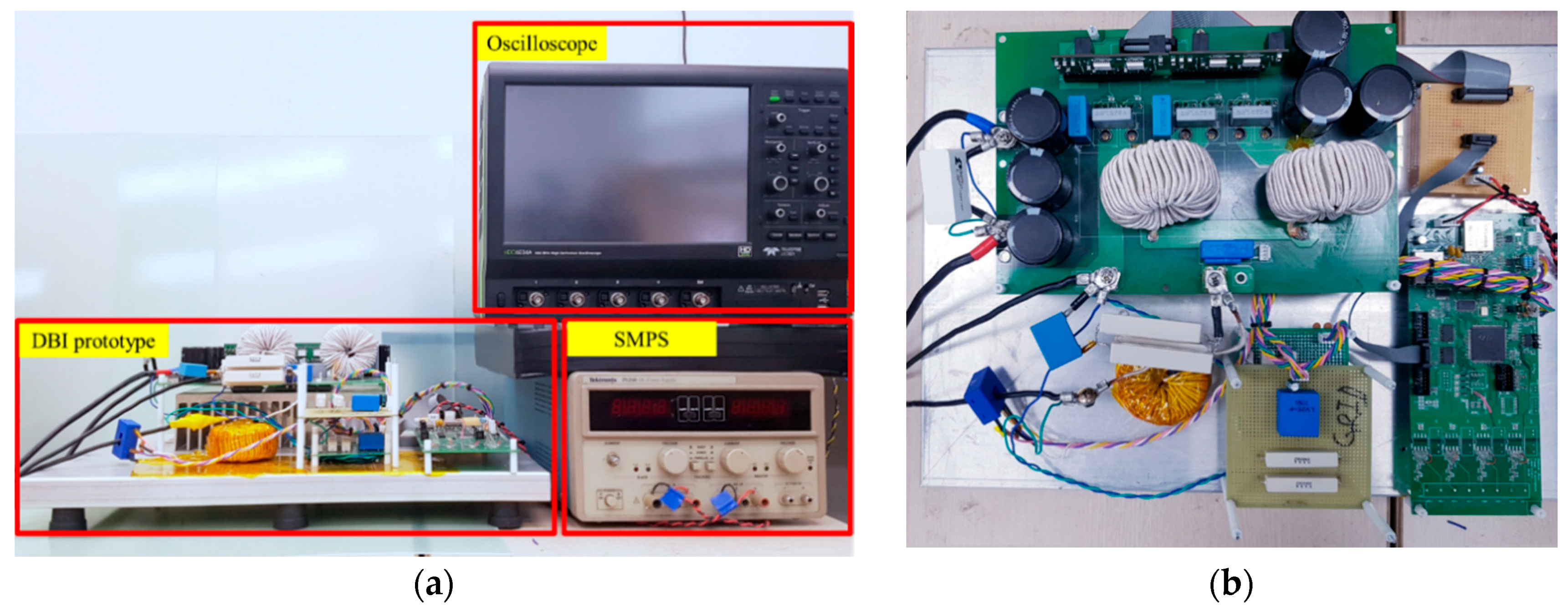
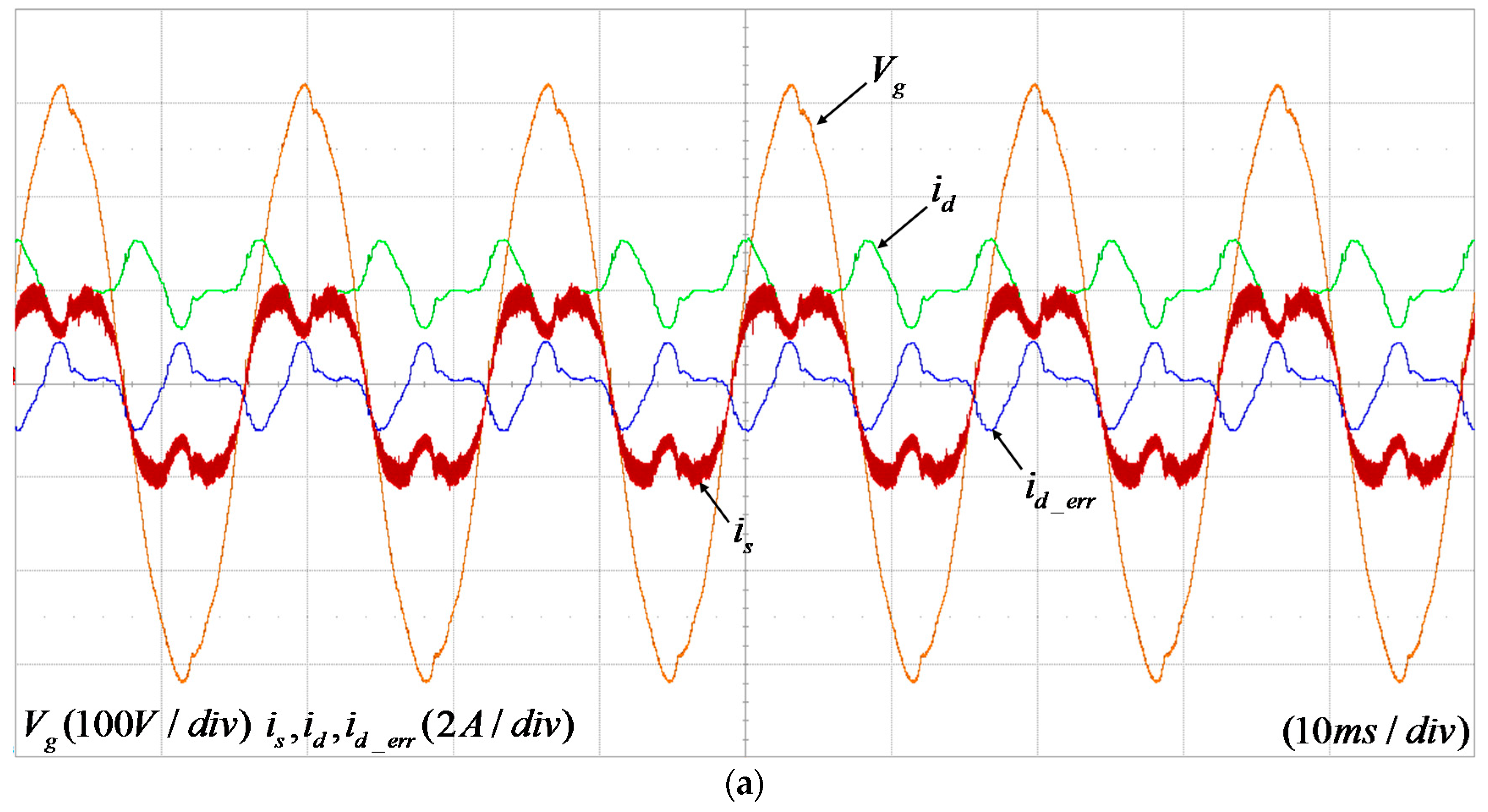
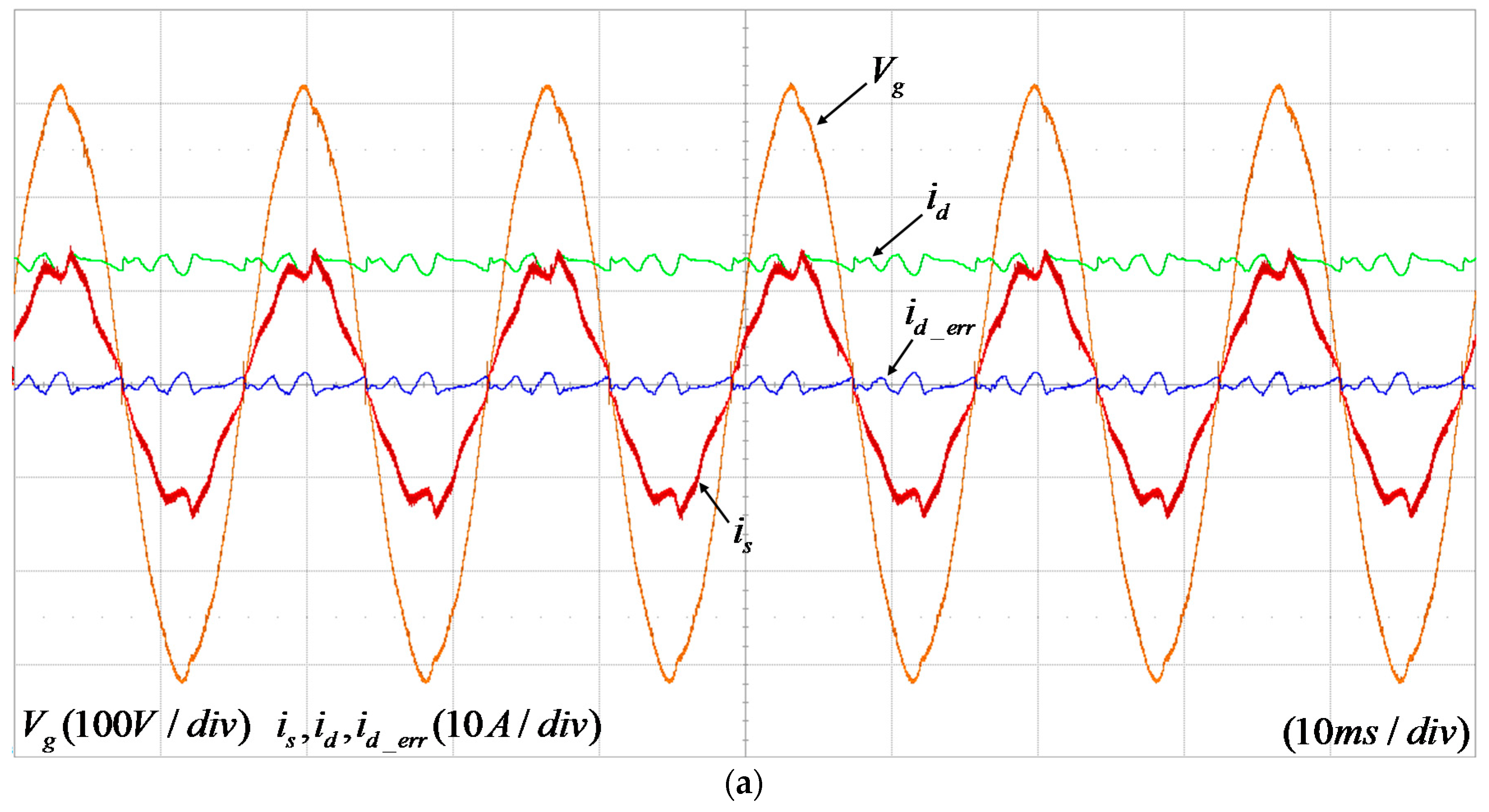
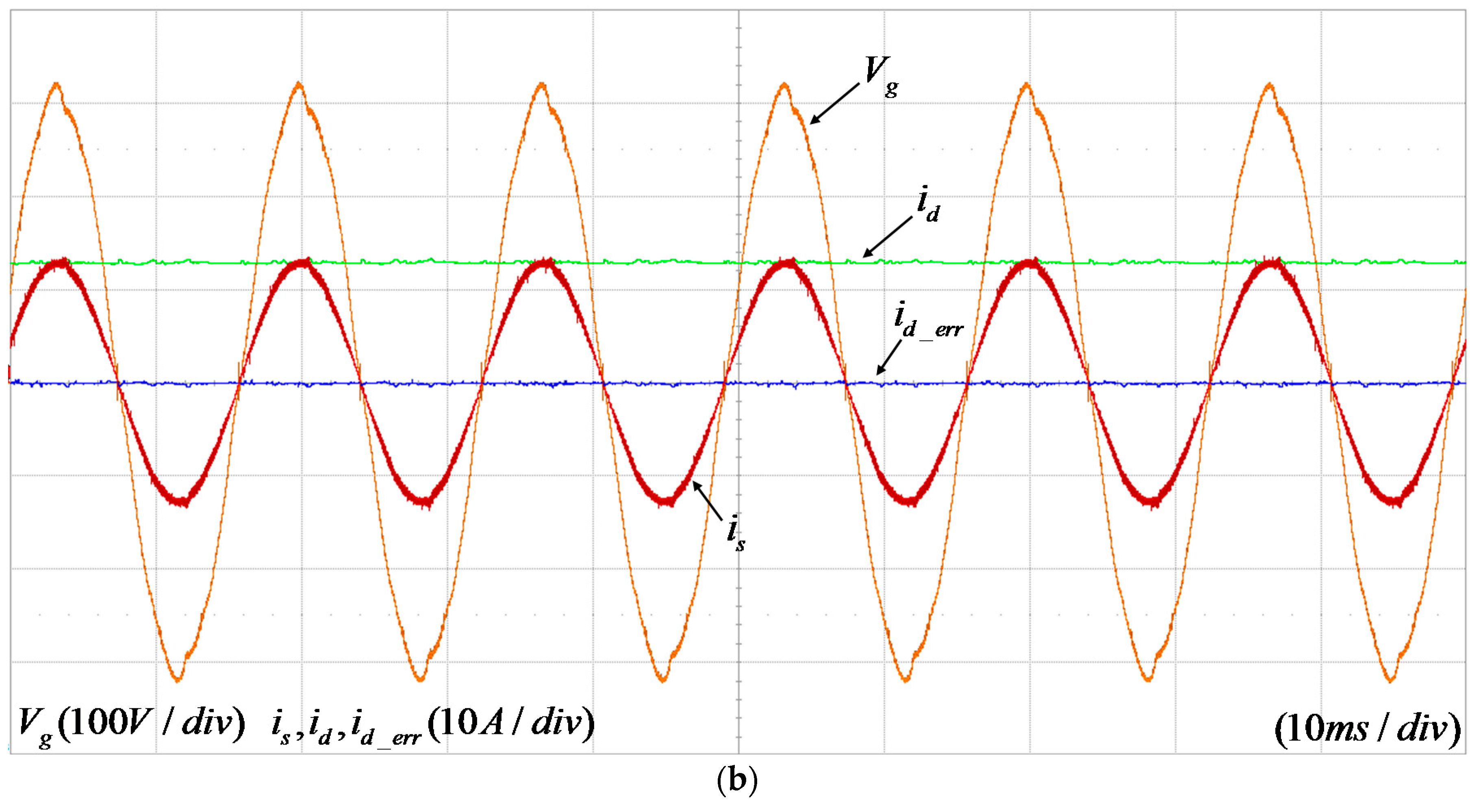
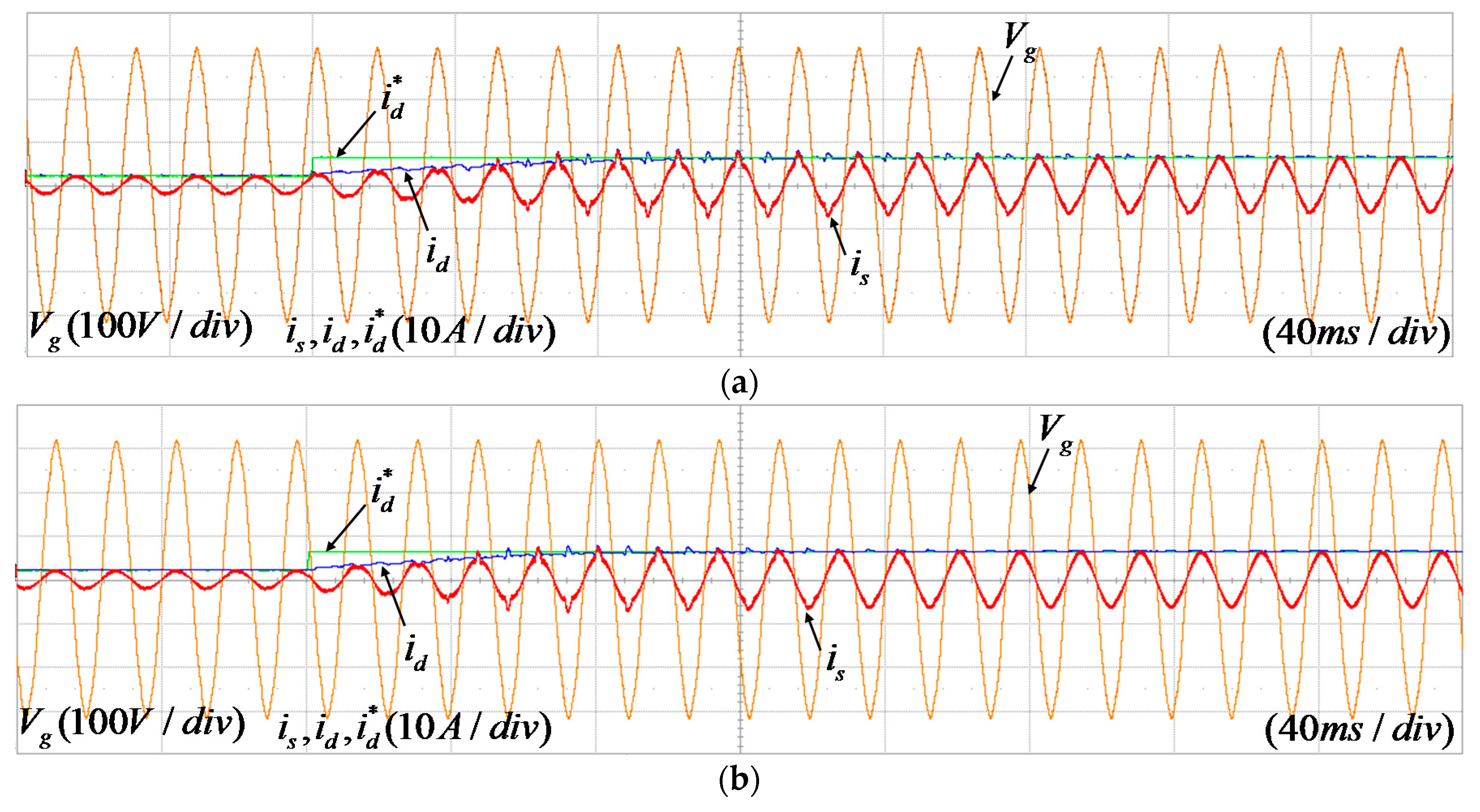
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ayompe, L.; Duffy, A.; McCormack, S.; Conlon, M. Measured performance of a 1.72 kW rooftop grid connected photovoltaic system in Ireland. Energy Convers. Manag. 2011, 52, 816–825. [Google Scholar] [CrossRef]
- Díez-Mediavilla, M.; Dieste-Velasco, M.; Rodríguez-Amigo, M.d.C.; García-Calderón, T.; Alonso-Tristán, C. Performance of grid-tied PV facilities based on real data in Spain: Central inverter versus string system. Energy Convers. Manag. 2014, 86, 1128–1133. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- IEA-PVPS. Trends in Photovoltaic Applications; Survey Report of Selected IEA Countries between 1992 and 2016; IEA: Paris, France, 2014. [Google Scholar]
- Freddy, T.K.S.; Rahim, N.A.; Hew, W.-P.; Che, H.S. Comparison and analysis of single-phase transformerless grid-connected PV inverters. IEEE Trans. Power Electron. 2014, 29, 5358–5369. [Google Scholar] [CrossRef]
- Chen, B.; Sun, P.; Liu, C.; Chen, C.-L.; Lai, J.-S.; Yu, W. High efficiency transformerless photovoltaic inverter with wide-range power factor capability. In Proceedings of the 2012 Twenty-Seventh Annual IEEE on Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 575–582. [Google Scholar]
- Kerekes, T.; Teodorescu, R.; Rodríguez, P.; Vázquez, G.; Aldabas, E. A new high-efficiency single-phase transformerless PV inverter topology. IEEE Trans. Ind. Electron. 2011, 58, 184–191. [Google Scholar] [CrossRef]
- Kafle, Y.R.; Town, G.E.; Guochun, X.; Gautam, S. Performance comparison of single-phase transformerless PV inverter systems. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 3589–3593. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 29. [Google Scholar]
- Chen, B.; Lai, J.-S. A family of single-phase transformerless inverters with asymmetric phase-legs. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2200–2205. [Google Scholar]
- Yu, W.; Lai, J.-S.J.; Qian, H.; Hutchens, C. High-efficiency MOSFET inverter with H6-type configuration for photovoltaic nonisolated AC-module applications. IEEE Trans. Power Electron. 2011, 26, 1253–1260. [Google Scholar] [CrossRef]
- Huang, Q.; Ma, Q.; Huang, A.Q. Single-phase dual-mode four-switch Buck-Boost Transformerless PV inverter with inherent leakage current elimination. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 3211–3217. [Google Scholar]
- Xiao, H.; Xie, S.; Chen, Y.; Huang, R. An optimized transformerless photovoltaic grid-connected inverter. IEEE Trans. Ind. Electron. 2011, 58, 1887–1895. [Google Scholar] [CrossRef]
- Zhang, L.; Sun, K.; Feng, L.; Wu, H.; Xing, Y. A family of neutral point clamped full-bridge topologies for transformerless photovoltaic grid-tied inverters. IEEE Trans. Power Electron. 2013, 28, 730–739. [Google Scholar] [CrossRef]
- Ma, L.; Kerekes, T.; Teodorescu, R.; Jin, X.; Floricau, D.; Liserre, M. The high efficiency transformer-less PV inverter topologies derived from NPC topology. In Proceedings of the 13th European Conference on Power Electronics and Applications, EPE’09, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Cho, Y. Dual-buck residential photovoltaic inverter with a high-accuracy repetitive current controller. Renew. Energy 2017, 101, 168–181. [Google Scholar] [CrossRef]
- Hwang, D.-H.; Lee, J.-Y.; Cho, Y. Single-phase single-stage dual-buck photovoltaic inverter with active power decoupling strategy. Renew. Energy 2018, 126, 454–464. [Google Scholar] [CrossRef]
- Hong, F.; Liu, J.; Ji, B.; Zhou, Y.; Wang, J.; Wang, C. Interleaved dual buck full-bridge three-level inverter. IEEE Trans. Power Electron. 2016, 31, 964–974. [Google Scholar] [CrossRef]
- Monfared, M.; Golestan, S.; Guerrero, J.M. Analysis, design, and experimental verification of a synchronous reference frame voltage control for single-phase inverters. IEEE Trans. Ind. Electron. 2014, 61, 258–269. [Google Scholar] [CrossRef]
- Han, Y.; Fang, X.; Yang, P.; Wang, C.; Xu, L.; Guerrero, J.M. Stability Analysis of Digital-Controlled Single-Phase Inverter With Synchronous Reference Frame Voltage Control. IEEE Trans. Power Electron. 2018, 33, 6333–6350. [Google Scholar] [CrossRef]
- Zhang, R.; Cardinal, M.; Szczesny, P.; Dame, M. A grid simulator with control of single-phase power converters in DQ rotating frame. In Proceedings of the 2002 IEEE 33rd Annual Power Electronics Specialists Conference, PESC 02, Cairns, QLD, Australia, 23–27 June 2002; pp. 1431–1436. [Google Scholar]
- Hiti, S.; Boroyevich, D. Control of front-end three-phase boost rectifier. In Proceedings of the Ninth Annual Applied Power Electronics Conference and Exposition, APEC’94, Orlando, FL, USA, 13–17 February 1994; pp. 927–933. [Google Scholar]
- Hiti, S.; Borojevic, D.; Ambatipudi, R.; Zhang, R.; Jiang, Y. Average current control of three-phase PWM boost rectifier. In Proceedings of the 26th Annual IEEE Power Electronics Specialists Conference, PESC’95 Record, Atlanta, GA, USA, 18–22 June 1995; pp. 131–137. [Google Scholar]
- Roshan, A.; Burgos, R.; Baisden, A.C.; Wang, F.; Boroyevich, D. A DQ frame controller for a full-bridge single phase inverter used in small distributed power generation systems. In Proceedings of the APEC 2007-Twenty Second Annual IEEE Applied Power Electronics Conference, Anaheim, CA, USA, 25 February–1 March 2007; pp. 641–647. [Google Scholar]
- Kim, R.-Y.; Choi, S.-Y.; Suh, I.-Y. Instantaneous control of average power for grid tie inverter using single phase DQ rotating frame with all pass filter. In Proceedings of the 30th Annual Conference of IEEE Industrial Electronics Society, IECON 2004, Busan, Korea, 2–6 November 2004; pp. 274–279. [Google Scholar]
- Griñó, R.; Costa-Castelló, R.; Fossas, E. Digital control of a single-phase shunt active filter. In Proceedings of the 2003 IEEE 34th Annual Power Electronics Specialist Conference, PESC’03, Acapulco, Mexico, 15–19 June 2003; pp. 1038–1042. [Google Scholar]
- Liu, T.; Wang, D.; Zhou, K. High-performance grid simulator using parallel structure fractional repetitive control. IEEE Trans. Power Electron. 2016, 31, 2669–2679. [Google Scholar] [CrossRef]
- Pandove, G.; Trivedi, A.; Singh, M. Repetitive control-based single-phase bidirectional rectifier with enhanced performance. IET Power Electron. 2016, 9, 1029–1036. [Google Scholar] [CrossRef]
- Cho, Y.; Lai, J.-S. Digital plug-in repetitive controller for single-phase bridgeless PFC converters. IEEE Trans. Power Electron. 2013, 28, 165–175. [Google Scholar]
- Costa-Castelló, R.; Grinó, R.; Fossas, E. Odd-harmonic digital repetitive control of a single-phase current active filter. IEEE Trans. Power Electron. 2004, 19, 1060–1068. [Google Scholar] [CrossRef]
- Yang, S.; Wang, P.; Tang, Y.; Zagrodnik, M.; Hu, X.; Tseng, K.J. Circulating current suppression in modular multilevel converters with even-harmonic repetitive control. IEEE Trans. Ind. Appl. 2018, 54, 298–309. [Google Scholar] [CrossRef]
- Zhou, K.; Wang, D.; Zhang, B.; Wang, Y. Plug-in dual-mode-structure repetitive controller for CVCF PWM inverters. IEEE Trans. Ind. Electron. 2009, 56, 784–791. [Google Scholar] [CrossRef]
- Zhou, K.; Wang, D. Digital repetitive controlled three-phase PWM rectifier. IEEE Trans. Power Electron. 2003, 18, 309–316. [Google Scholar] [CrossRef]
- Chew, K.K.; Tomizuka, M. Digital control of repetitive errors in disk drive systems. In Proceedings of the American Control Conference, Milwaukee, WA, USA, 27–29 June 1989; pp. 540–548. [Google Scholar]
- Zou, Z.-X.; Zhou, K.; Wang, Z.; Cheng, M. Frequency-adaptive fractional-order repetitive control of shunt active power filters. IEEE Trans. Ind. Electron. 2015, 62, 1659–1668. [Google Scholar] [CrossRef]
- The Institute of Electrical and Electronics Engineers, Inc. IEEE Recommened Practice for Utility Interface of Photovoltaic(PV) System; IEEE Std. 929-2000: April 2000; The Institute of Electrical and Electronics Engineers, Inc.: New York, NY, USA, 2000. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value (unit) |
|---|---|
| Switching frequency () | 18 kHz |
| Inverter side inductor () | 0.5 mH |
| Grid side inductor () | 0.5 mH |
| Filter capacitor () | 1 F |
| Damping Resistor () | 5 |
| Grid voltage in RMS | 220 V/60 Hz |
| DC link voltage () | 380 V |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-Y.; Cho, Y. Synchronous Reference Frame Repetitive Control of a Single-Phase Three-Level Dual-Buck Photovoltaic Inverter. Electronics 2018, 7, 226. https://doi.org/10.3390/electronics7100226
Lee J-Y, Cho Y. Synchronous Reference Frame Repetitive Control of a Single-Phase Three-Level Dual-Buck Photovoltaic Inverter. Electronics. 2018; 7(10):226. https://doi.org/10.3390/electronics7100226
Chicago/Turabian StyleLee, Jung-Yong, and Younghoon Cho. 2018. "Synchronous Reference Frame Repetitive Control of a Single-Phase Three-Level Dual-Buck Photovoltaic Inverter" Electronics 7, no. 10: 226. https://doi.org/10.3390/electronics7100226
APA StyleLee, J.-Y., & Cho, Y. (2018). Synchronous Reference Frame Repetitive Control of a Single-Phase Three-Level Dual-Buck Photovoltaic Inverter. Electronics, 7(10), 226. https://doi.org/10.3390/electronics7100226