
Event-Triggered Adaptive Backstepping Control of Underactuated AUVs with Input Saturation


Abstract
1. Introduction
2. Mathematical Model and Preliminaries
2.1. Problem Formulation
2.2. Assumption and Lemma
2.3. Output Redefinition and Auxiliary System
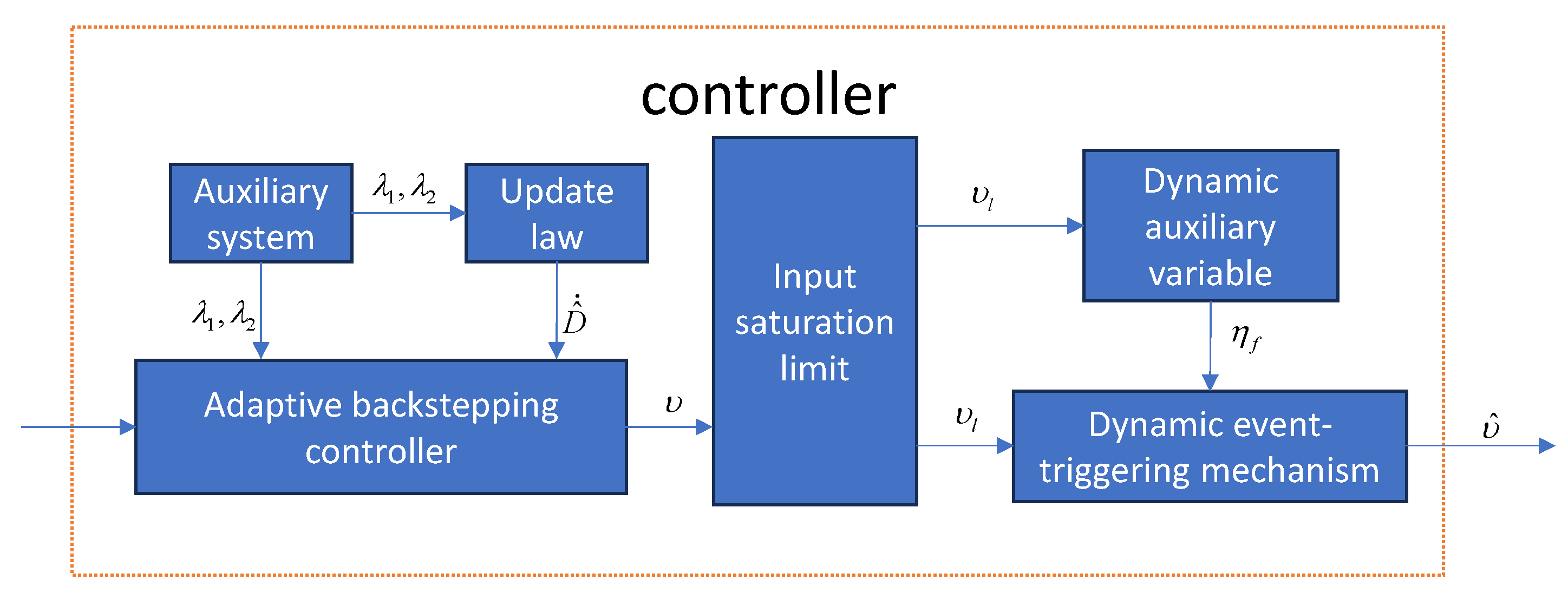
3. Controller Design
3.1. Adaptive Backstepping Controller Design
- Step 1:
- Step 2:
- (1)
- (2)
3.2. Dynamic Event-Triggered Control
4. Simulation Results
4.1. Example 1
4.2. Example 2
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, Y.; Zhang, K.; Zhao, M.; Qin, H. Adaptive meta-reinforcement learning for AUVs 3D guidance and control under unknown ocean currents. Ocean Eng. 2024, 309, 118498. [Google Scholar] [CrossRef]
- Ma, D.; Chen, X.; Ma, W.; Zheng, H.; Qu, F. Neural Network Model-Based Reinforcement Learning Control for AUV 3-D Path Following. IEEE Trans. Intell. Veh. 2024, 9, 893–904. [Google Scholar] [CrossRef]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Adaptive Neural Network Control of AUVs with Control Input Nonlinearities Using Reinforcement Learning. IEEE Trans. Syst. Man Cybern.-Syst. 2017, 47, 1019–1029. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Y.; Song, Z. Event-triggered adaptive fault-tolerant control with pre-specified performance for AUVs trajectory tracking. Ocean Eng. 2024, 313, 119372. [Google Scholar] [CrossRef]
- Li, Z.; Wang, M.; Ma, G.; Zou, T. Adaptive reinforcement learning fault-tolerant control for AUVs with thruster faults based on the integral extended state observer. Ocean Eng. 2023, 271, 113722. [Google Scholar] [CrossRef]
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, L.; Zhang, G.; Wang, C.; Chai, Y.; Mao, Z. Research on 3D trajectory tracking of underactuated AUV under strong disturbance environment. Comput. Electr. Eng. 2023, 111, 108924. [Google Scholar] [CrossRef]
- Gong, H.; Er, M.J.; Liu, Y.; Ma, C. Three-dimensional optimal trajectory tracking control of underactuated AUVs with uncertain dynamics and input saturation. Ocean Eng. 2024, 298, 116757. [Google Scholar] [CrossRef]
- Gong, H.; Er, M.J.; Liu, Y. Fuzzy adaptive optimal fault-tolerant trajectory tracking control for underactuated AUVs with input saturation. Ocean Eng. 2024, 311, 118940. [Google Scholar] [CrossRef]
- Luo, W.; Cheng, B. Disturbance suppression and NN compensation based trajectory tracking of underactuated AUV. Ocean Eng. 2023, 288, 116172. [Google Scholar] [CrossRef]
- Zhou, Q.; Wang, L.; Wu, C.; Li, H.; Du, H. Adaptive Fuzzy Control for Nonstrict-Feedback Systems with Input Saturation and Output Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1–12. [Google Scholar] [CrossRef]
- Li, J.; Fan, Y.; Liu, J. Distributed fixed-time formation tracking control for multiple underactuated USVs with lumped uncertainties and input saturation. ISA Trans. 2024, 154, 186–198. [Google Scholar] [CrossRef]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural Control of Robot Manipulators with Trajectory Tracking Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4231–4242. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Zhang, X.M.; Ding, D. Dynamic Event-triggered Control and Estimation: A Survey. Int. J. Autom. Comput. 2021, 18, 857–886. [Google Scholar] [CrossRef]
- Sedghi, L.; Ijaz, Z.; Noor-A-Rahim, M.; Witheephanich, K.; Pesch, D. Machine Learning in Event-Triggered Control: Recent Advances and Open Issues. IEEE Access 2022, 10, 74671–74690. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, R.; Yu, S.; Wang, C.; Li, T. Event-triggered output feedback sliding mode control of mechanical systems. Nonlinear Dyn. 2022, 107, 3543–3555. [Google Scholar] [CrossRef]
- Ye, H.; Song, Y.; Zhang, Z.; Wen, C. Global Dynamic Event-Triggered Control for Nonlinear Systems with Sensor and Actuator Faults: A Matrix-Pencil-Based Approach. IEEE Trans. Autom. Control 2024, 69, 2007–2014. [Google Scholar] [CrossRef]
- Xiao, J.; Liu, Y.; An, Y. Adaptive dynamic event-triggered fault tolerant control for uncertain strict-feedback nonlinear systems. Eur. J. Control 2024, 79, 101096. [Google Scholar] [CrossRef]
- Xing, L.; Wen, C. Dynamic event-triggered adaptive control for a class of uncertain nonlinear systems. Automatica 2023, 158, 111286. [Google Scholar] [CrossRef]
- Hu, X.; Gong, Q.; Han, J.; Zhu, X.; Yang, H.; Wang, M. Dynamic event-triggered composite anti-disturbance fault-tolerant tracking control for ships with disturbances and actuator faults. Ocean Eng. 2023, 280, 114662. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C. Adaptive Backstepping Control of Uncertain Systems; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Zhang, X.; Jiang, K. Backstepping-based adaptive control of underactuated AUV subject to unknown dynamics and zero tracking errors. Ocean Eng. 2024, 302, 117640. [Google Scholar] [CrossRef]
- Shojaei, K.; Arefi, M.M. On the neuro-adaptive feedback linearising control of underactuated autonomous underwater vehicles in three-dimensional space. IET Control Theory Appl. 2015, 9, 1264–1273. [Google Scholar] [CrossRef]
- Consolini, L.; Tosques, M. A Minimum Phase Output in the Exact Tracking Problem for the Nonminimum Phase Underactuated Surface Ship. IEEE Trans. Autom. Control 2012, 57, 3174–3180. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Expression | |
|---|---|
| controller | |
| update law | |
| dynamic event-triggered mechanism |
| Static Event-Triggered | Dynamic Event-Triggered | |
|---|---|---|
| Example 1 | x: | x: |
| y: | y: | |
| z: | z: | |
| Example 2 | x: | x: |
| y: | y: | |
| z: | z: |
| Static Event-Triggered | Dynamic Event-Triggered | |
|---|---|---|
| Example 1 | 4340 | 3994 |
| Example 2 | 3885 | 2624 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, F.; Zheng, Y.; Wang, A.; Cai, J. Event-Triggered Adaptive Backstepping Control of Underactuated AUVs with Input Saturation. Electronics 2025, 14, 1839. https://doi.org/10.3390/electronics14091839
Qian F, Zheng Y, Wang A, Cai J. Event-Triggered Adaptive Backstepping Control of Underactuated AUVs with Input Saturation. Electronics. 2025; 14(9):1839. https://doi.org/10.3390/electronics14091839
Chicago/Turabian StyleQian, Feng, Yusheng Zheng, Ao Wang, and Jianping Cai. 2025. "Event-Triggered Adaptive Backstepping Control of Underactuated AUVs with Input Saturation" Electronics 14, no. 9: 1839. https://doi.org/10.3390/electronics14091839
APA StyleQian, F., Zheng, Y., Wang, A., & Cai, J. (2025). Event-Triggered Adaptive Backstepping Control of Underactuated AUVs with Input Saturation. Electronics, 14(9), 1839. https://doi.org/10.3390/electronics14091839