
Stiffness Perception Analysis in Haptic Teleoperation with Imperfect Communication Network


Abstract
1. Introduction
2. Experimental Method
2.1. Participants
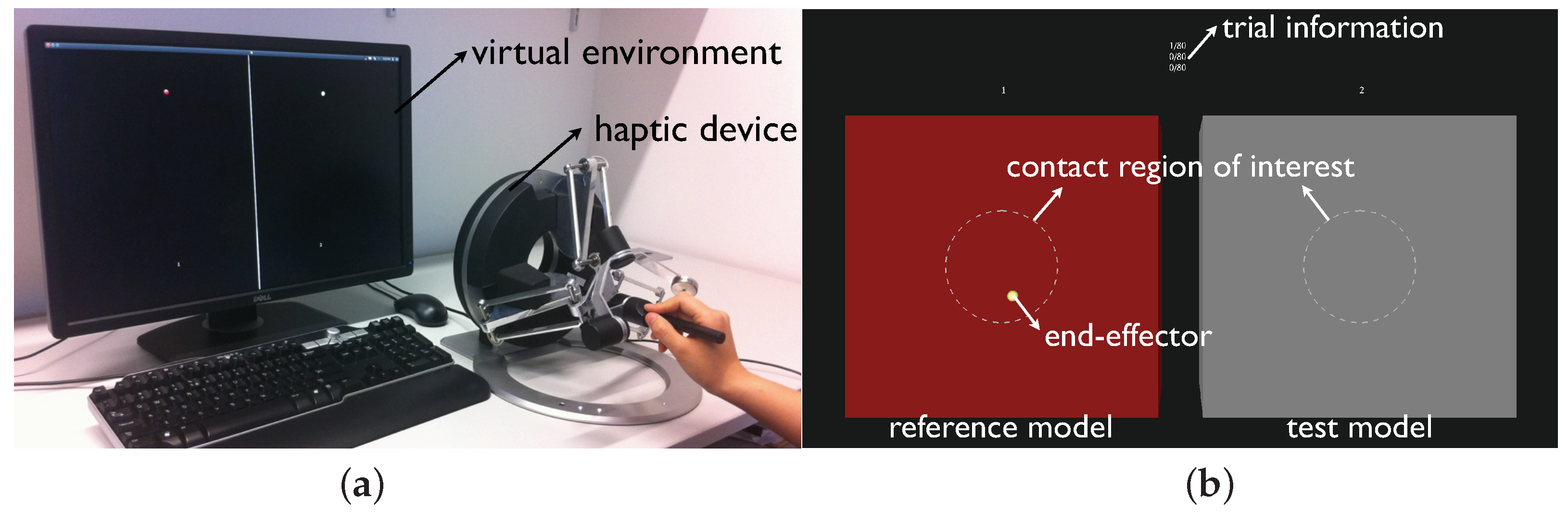
2.2. Apparatus
2.3. Task Description
2.3.1. Discrimination Task
2.3.2. Virtual Environment
2.3.3. Imperfect Communication Network
2.3.4. Procedure
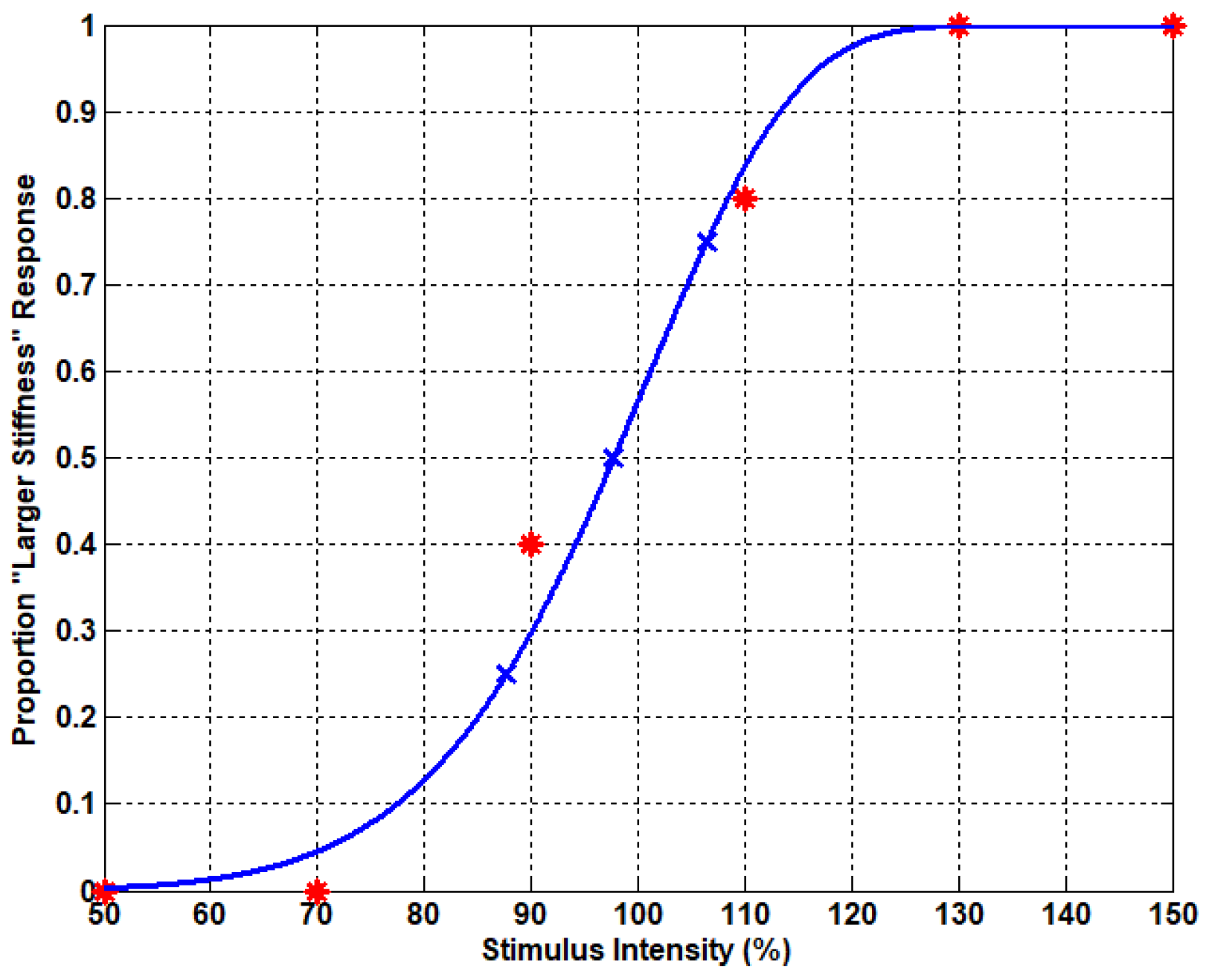
2.4. Data Analysis
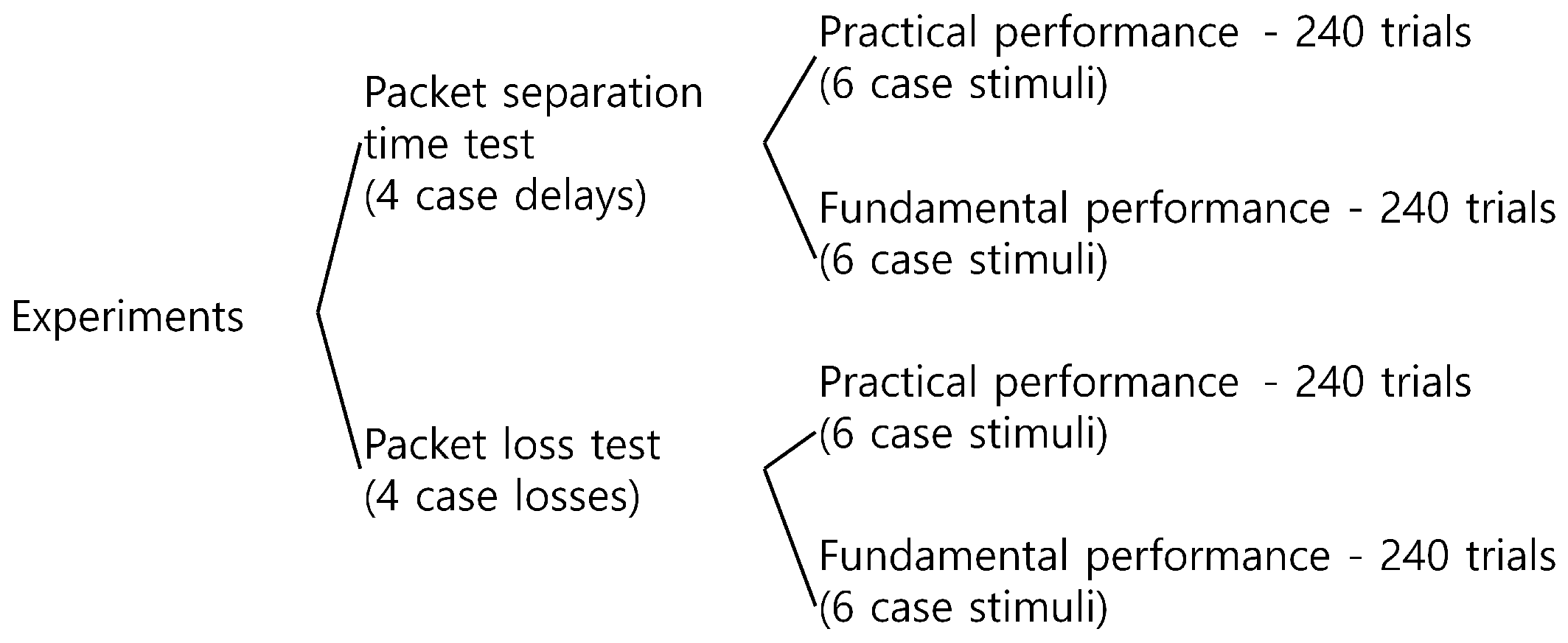
3. Experiment 1: Packet Separation Time Test
3.1. Method
3.1.1. Packet Separation Time Simulation
3.1.2. Procedure
3.2. Results and Discussion
3.2.1. Test of Fundamental Performance
3.2.2. Test of Practical Performance
4. Experiment 2: Packet Loss Test
4.1. Method
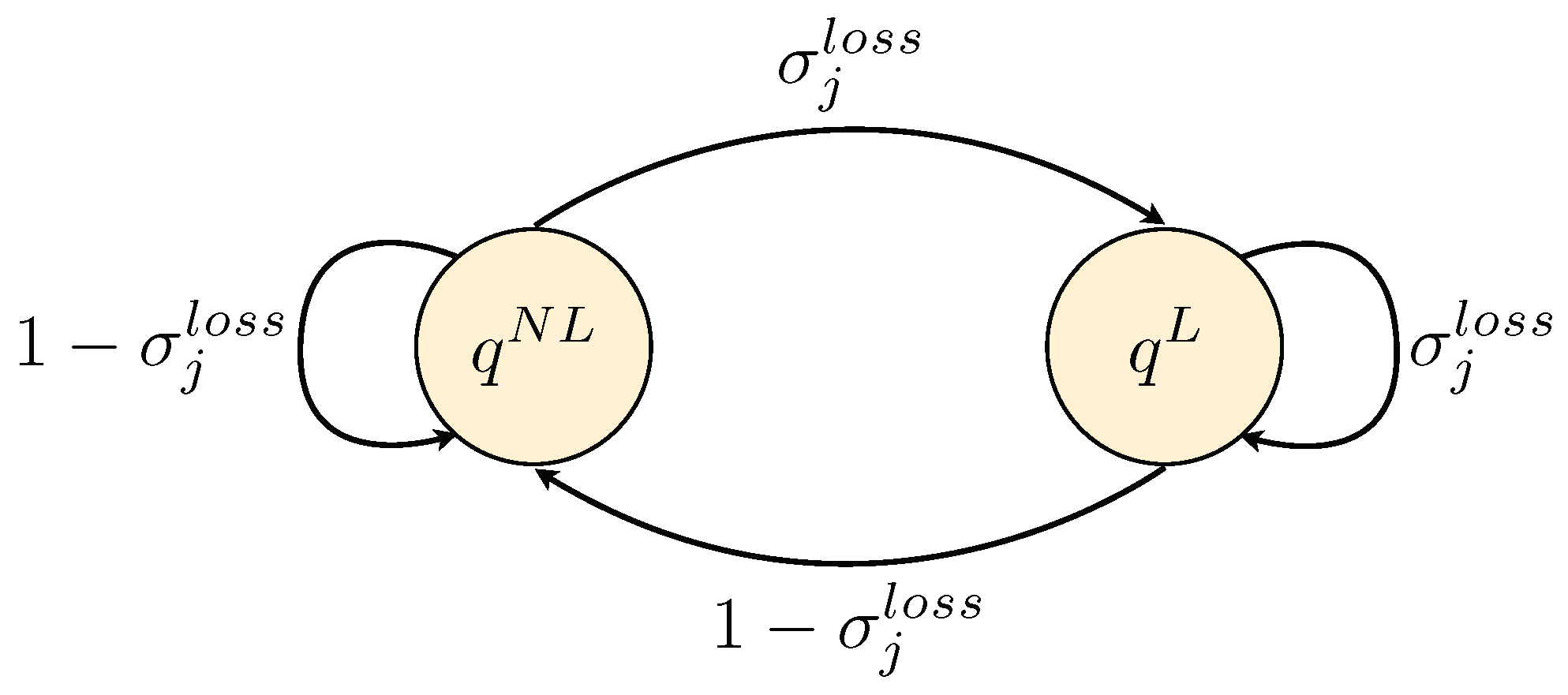
4.1.1. Packet Loss Simulation
4.1.2. Procedure
4.2. Results and Discussion
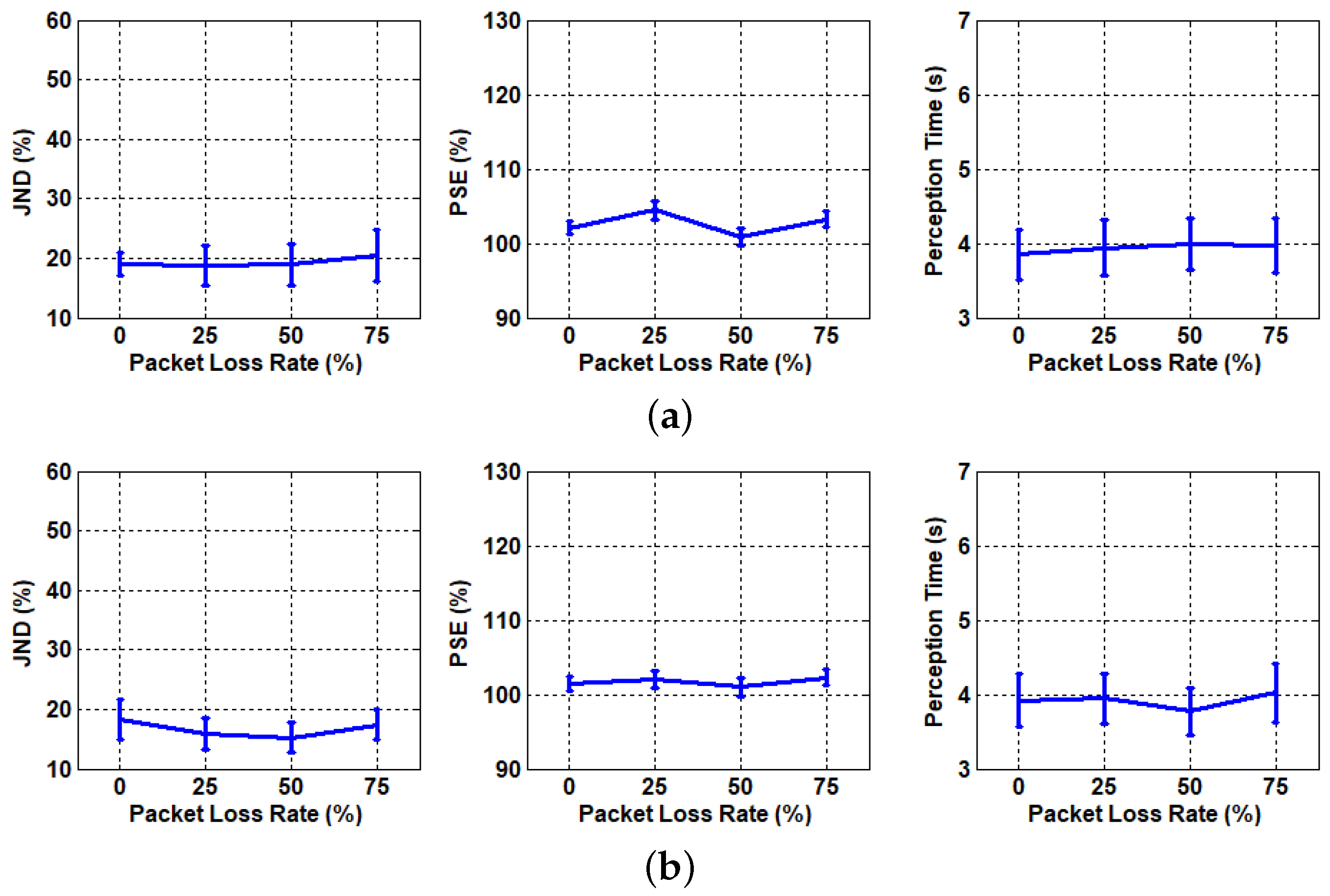
4.2.1. Test of Fundamental Performance
4.2.2. Test of Practical Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kamezaki, M.; Iwata, H.; Sugano, S. A practical operator support scheme and its application to safety-ensured object break using dual-arm machinery. Adv. Robot. 2014, 28, 1599–1615. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A.; Vidoni, R.; Zanotto, V. A delayed force-reflecting haptic controller for master–slave neurosurgical robots. Adv. Robot. 2015, 29, 127–138. [Google Scholar] [CrossRef]
- Robot, B.E.A. Robots on the Battlefield and for Space Travel. In Robotics in Physical Medicine and Rehabilitation; Elsevier: Amsterdam, The Netherlands, 2023; p. 105. [Google Scholar]
- Hill, J.W. Study of Modeling and Evaluation of Remote Manipulation Tasks with Force Feedback; Final Report; SRI International Project: Menlo Park, CA, USA, 1979; Volume 7696. [Google Scholar]
- Son, H.I.; Hong, A.; Bülthoff, H.H.; Lee, D. Effects of imperfect communication network on haptic teleoperator’s performance. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems, Jeju Island, Republic of Korea, 17–21 October 2012; pp. 1772–1777. [Google Scholar]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef]
- Seo, C.; Kim, J.P.; Kim, J.; Ahn, H.S.; Ryu, J. Robustly stable bilateral teleoperation under time-varying delays and data losses: An energy-bounding approach. J. Mech. Sci. Technol. 2011, 25, 2089. [Google Scholar] [CrossRef]
- Lee, D.; Huang, K. Passive-set-position-modulation framework for interactive robotic systems. IEEE Trans. Robot. 2010, 26, 354–369. [Google Scholar]
- Michel, Y.; Saveriano, M.; Lee, D. A passivity-based approach for variable stiffness control with dynamical systems. IEEE Trans. Autom. Sci. Eng. 2023, 21, 6265–6276. [Google Scholar] [CrossRef]
- Mahvash, M.; Okamura, A.M. Enhancing transparency of a position-exchange teleoperator. In Proceedings of the EuroHaptics Conference, 2007 and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. World Haptics 2007, Second Joint, Tsukuba, Japan, 22–24 March 2007; pp. 470–475. [Google Scholar]
- Mahvash, M.; Okamura, A. Friction compensation for enhancing transparency of a teleoperator with compliant transmission. IEEE Trans. Robot. 2007, 23, 1240–1246. [Google Scholar] [CrossRef] [PubMed]
- Hassan, T.; Hameed, A.; Nisar, S.; Kamal, N.; Hasan, O. Al-Zahrawi: A telesurgical robotic system for minimal invasive surgery. IEEE Syst. J. 2016, 10, 1035–1045. [Google Scholar] [CrossRef]
- Isaac-Lowry, O.J.; Okamoto, S.; Pedram, S.A.; Woo, R.; Berkelman, P. Compact teleoperated laparoendoscopic single-site robotic surgical system: Kinematics, control, and operation. Int. J. Med. Robot. Comput. Assist. Surg. 2017, 13, e1811. [Google Scholar] [CrossRef] [PubMed]
- Son, H.I.; Bhattacharjee, T.; Hashimoto, H. Effect of scaling on the performance and stability of teleoperation systems interacting with soft environments. Adv. Robot. 2011, 25, 1577–1601. [Google Scholar] [CrossRef]
- Son, H.I.; Cho, J.H.; Bhattacharjee, T.; Jung, H.; Lee, D.Y. Analytical and psychophysical comparison of bilateral teleoperators for enhanced perceptual performance. IEEE Trans. Ind. Electron. 2014, 61, 6202–6212. [Google Scholar] [CrossRef]
- Moniruzzaman, M.; Rassau, A.; Chai, D.; Islam, S.M.S. Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey. Robot. Auton. Syst. 2022, 150, 103973. [Google Scholar] [CrossRef]
- Darvish, K.; Penco, L.; Ramos, J.; Cisneros, R.; Pratt, J.; Yoshida, E.; Ivaldi, S.; Pucci, D. Teleoperation of humanoid robots: A survey. IEEE Trans. Robot. 2023, 39, 1706–1727. [Google Scholar] [CrossRef]
- Steinbach, E.; Hirche, S.; Ernst, M.; Brandi, F.; Chaudhari, R.; Kammerl, J.; Vittorias, I. Haptic communications. Proc. IEEE 2012, 100, 937–956. [Google Scholar] [CrossRef]
- Pressman, A.; Welty, L.; Karniel, A.; Mussa-Ivaldi, F. Perception of delayed stiffness. Int. J. Robot. Res. 2007, 26, 1191–1203. [Google Scholar] [CrossRef]
- Ohnishi, H.; Mochizuki, K. Effect of delay of feedback force on perception of elastic force: A psychophysical approach. IEICE Trans. Commun. 2007, 90, 12–20. [Google Scholar] [CrossRef]
- Nisky, I.; Mussa-Ivaldi, F.A.; Karniel, A. A regression and boundary-crossing-based model for the perception of delayed stiffness. IEEE Trans. Haptics 2008, 1, 73–82. [Google Scholar] [CrossRef]
- Di Luca, M.; Knörlein, B.; Ernst, M.; Harders, M. Effects of visual-haptic asynchronies and loading-unloading movements on compliance perception. Brain Res. Bull. 2011, 85, 245–259. [Google Scholar] [CrossRef] [PubMed]
- Delmerico, J.; Poranne, R.; Bogo, F.; Oleynikova, H.; Vollenweider, E.; Coros, S.; Nieto, J.; Pollefeys, M. Spatial computing and intuitive interaction: Bringing mixed reality and robotics together. IEEE Robot. Autom. Mag. 2022, 29, 45–57. [Google Scholar] [CrossRef]
- Mavrogiannis, C.; Alves-Oliveira, P.; Thomason, W.; Knepper, R.A. Social momentum: Design and evaluation of a framework for socially competent robot navigation. ACM Trans. Hum.-Robot. Interact. (THRI) 2022, 11, 14. [Google Scholar] [CrossRef]
- Fu, J.; Rota, A.; Li, S.; Zhao, J.; Liu, Q.; Iovene, E.; Ferrigno, G.; De Momi, E. Recent advancements in augmented reality for robotic applications: A survey. Actuators 2023, 12, 323. [Google Scholar] [CrossRef]
- Zhang, K.; Plianos, A.; Raimondi, L.; Abe, F.; Sugawara, Y.; Caliskanelli, I.; Cryer, A.; Thomas, J.; Pacheco-Gutierrez, S.; Hope, C.; et al. Towards safe, efficient long-reach manipulation in nuclear decommissioning: A case study on fuel debris retrieval at Fukushima Daiichi. J. Nucl. Sci. Technol. 2025, 62, 1–16. [Google Scholar] [CrossRef]
- Akbari, A.; Haghverd, F.; Behbahani, S. Robotic home-based rehabilitation systems design: From a literature review to a conceptual framework for community-based remote therapy during COVID-19 pandemic. Front. Robot. AI 2021, 8, 612331. [Google Scholar] [CrossRef] [PubMed]
- Nizamis, K.; Athanasiou, A.; Almpani, S.; Dimitrousis, C.; Astaras, A. Converging robotic technologies in targeted neural rehabilitation: A review of emerging solutions and challenges. Sensors 2021, 21, 2084. [Google Scholar] [CrossRef] [PubMed]
- Szczurek, K.A.; Prades, R.M.; Matheson, E.; Rodriguez-Nogueira, J.; Di Castro, M. Multimodal multi-user mixed reality human–robot interface for remote operations in hazardous environments. IEEE Access 2023, 11, 17305–17333. [Google Scholar] [CrossRef]
- Gescheider, G. Psychophysics: The Fundamentals; Lawrence Erlbaum: Hillsdale, NJ, USA, 2013. [Google Scholar]
- Wichmann, F.A.; Hill, N.J. The psychometric function: I. Fitting, sampling and goodness-of-fit. Percept. Psychophys. 2001, 63, 1293–1313. [Google Scholar] [CrossRef] [PubMed]
- Hirche, S.; Buss, M. Human perceived transparency with time delay. In Advances in Telerobotics; Springer: Berlin/Heidelberg, Germany, 2007; pp. 191–209. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Delay (s) | Fundamental Performance | Practical Performance | ||||
|---|---|---|---|---|---|---|
| JND | PSE | Tp (s) | JND | PSE | Tp (s) | |
| 0 | 16.42 | 101.59 | 4.63 | 20.84 | 104.97 | 4.72 |
| 30 | 19.05 | 107.75 | 4.39 | 20.64 | 103.21 | 4.68 |
| 60 | 21.59 | 117.66 | 4.57 | 24.48 | 102.32 | 4.83 |
| 90 | 19.98 | 124.14 | 4.97 | 39.68 | 100.23 | 5.63 |
| Packet Loss (%) | Fundamental Performance | Practical Performance | ||||
|---|---|---|---|---|---|---|
| JND | PSE | Tp (s) | JND | PSE | Tp (s) | |
| 0 | 17.06 | 102.89 | 3.76 | 18.32 | 101.53 | 3.92 |
| 25 | 17.34 | 103.65 | 3.81 | 15.89 | 101.04 | 3.94 |
| 50 | 18.12 | 101.29 | 3.87 | 15.22 | 101.12 | 3.78 |
| 75 | 17.09 | 103.11 | 3.84 | 17.38 | 101.62 | 4.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, Y.; Ju, C.; Son, H.I. Stiffness Perception Analysis in Haptic Teleoperation with Imperfect Communication Network. Electronics 2025, 14, 792. https://doi.org/10.3390/electronics14040792
Park Y, Ju C, Son HI. Stiffness Perception Analysis in Haptic Teleoperation with Imperfect Communication Network. Electronics. 2025; 14(4):792. https://doi.org/10.3390/electronics14040792
Chicago/Turabian StylePark, Yonghyun, Chanyoung Ju, and Hyoung Il Son. 2025. "Stiffness Perception Analysis in Haptic Teleoperation with Imperfect Communication Network" Electronics 14, no. 4: 792. https://doi.org/10.3390/electronics14040792
APA StylePark, Y., Ju, C., & Son, H. I. (2025). Stiffness Perception Analysis in Haptic Teleoperation with Imperfect Communication Network. Electronics, 14(4), 792. https://doi.org/10.3390/electronics14040792