


MateREAL Touch: Handheld Haptic Texture Display with Real Rolling Materials

Abstract

1. Introduction
1.1. Background
1.2. Related Works
1.3. Objective
2. Method
2.1. System Diagram
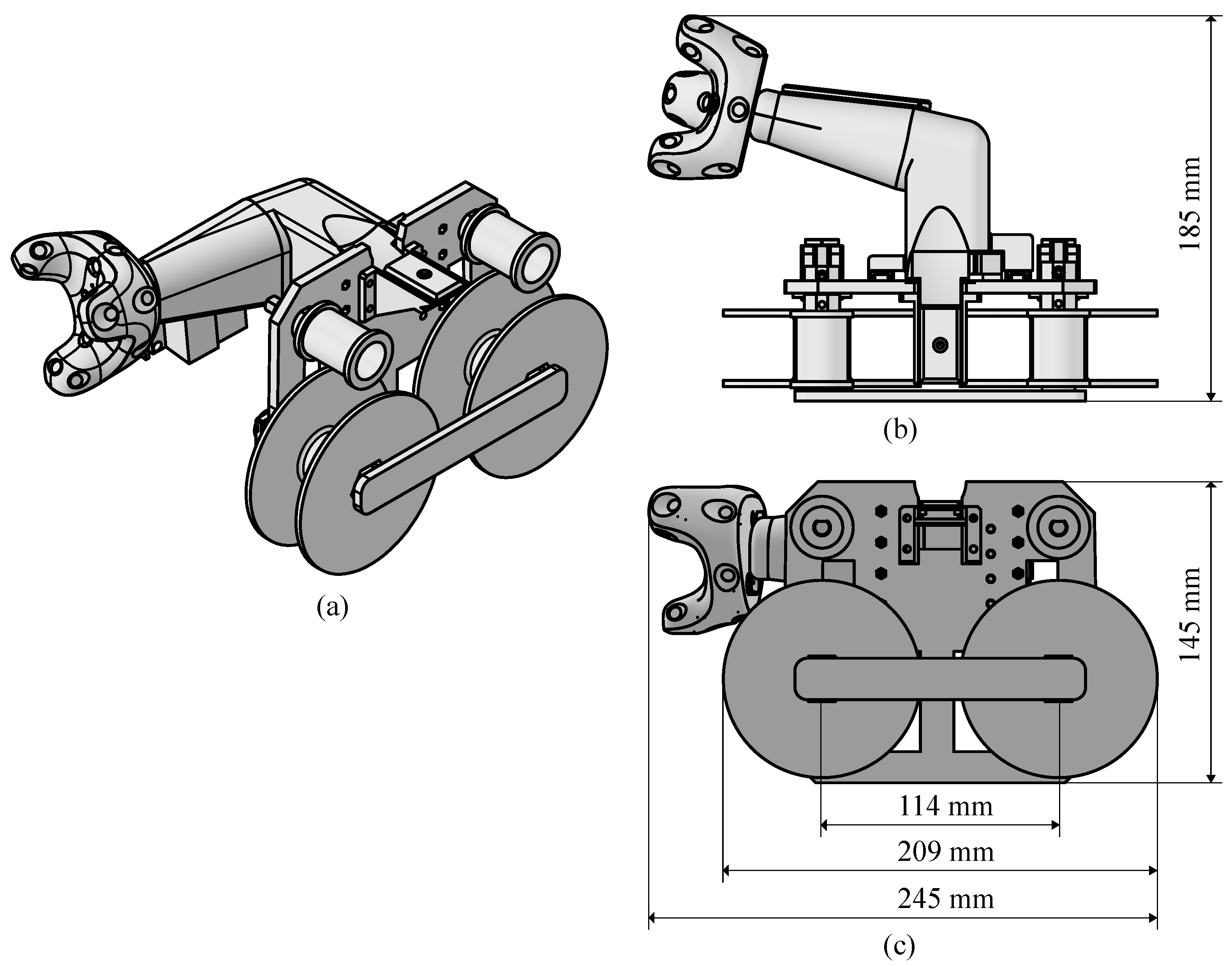
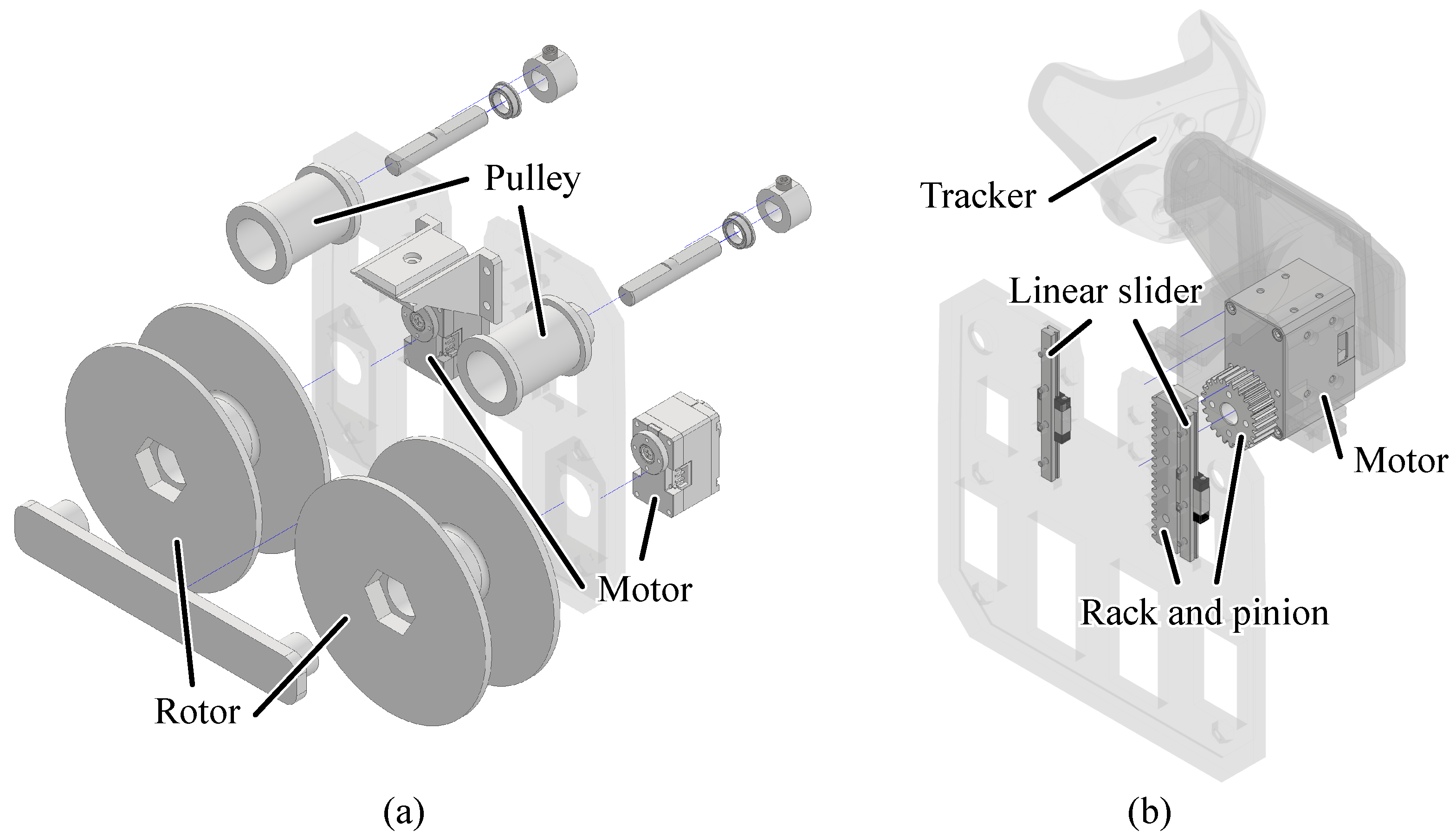
2.2. Hardware Design
2.3. Control Software
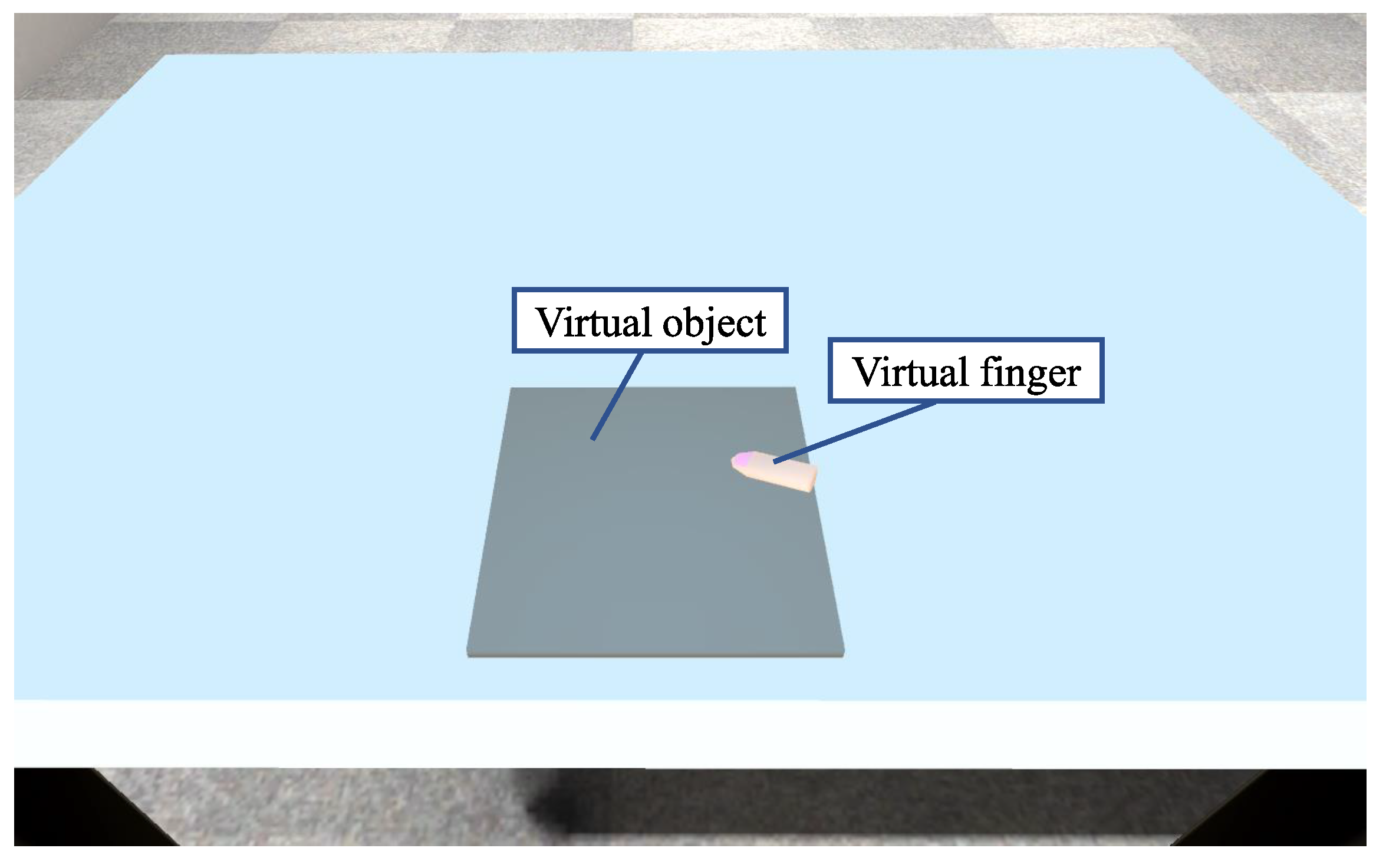
- Reproduction of stroking motion: When the virtual finger is in contact with the virtual object, the material is moved horizontally in accordance with the speed of the stroking motion. The roughness of the object’s surface is perceived through the vibrations produced by the skin during the stroking motion [26,27]. Thus, reproducing the stroking motion is considered a necessary function for presenting material properties accurately.
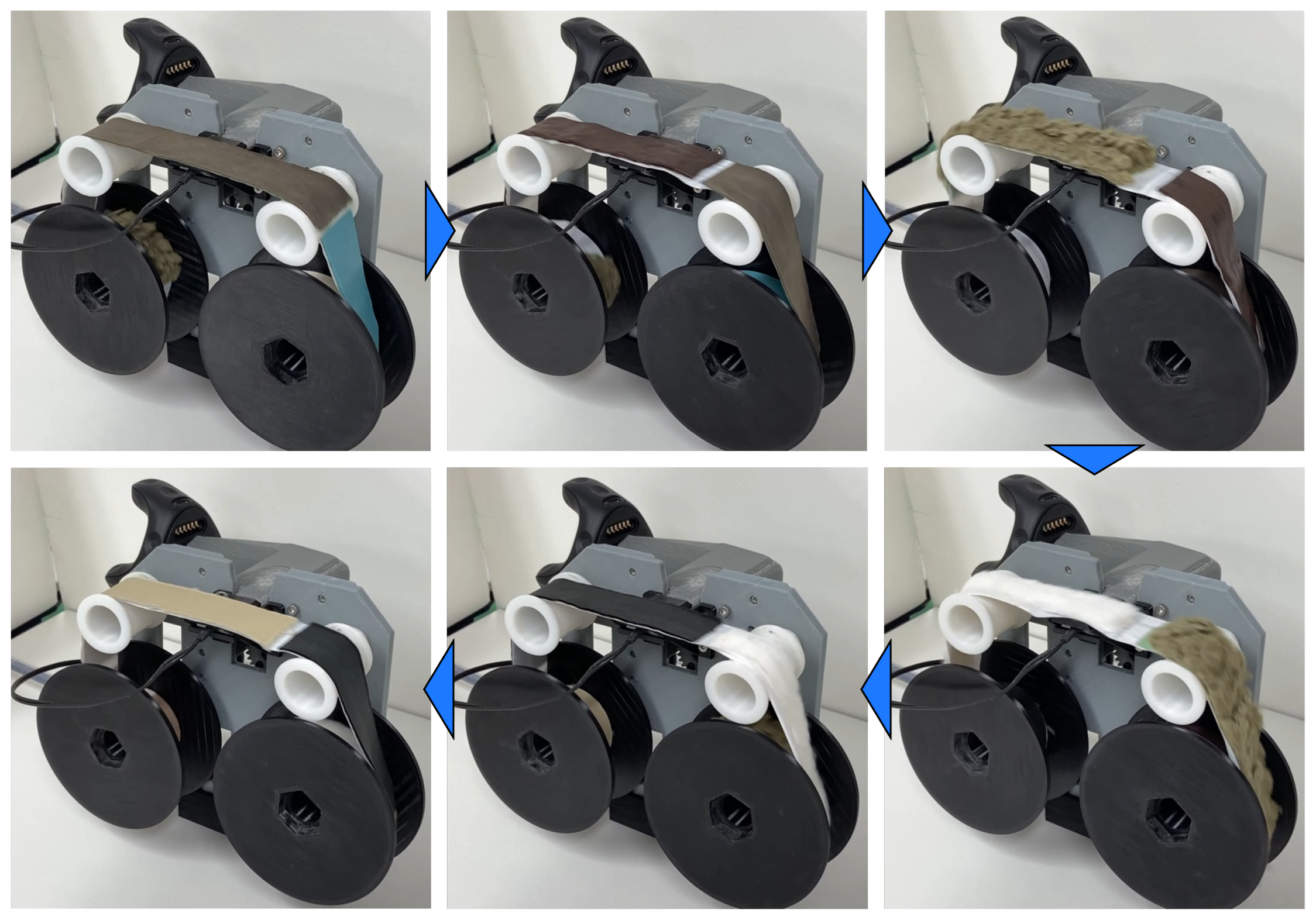
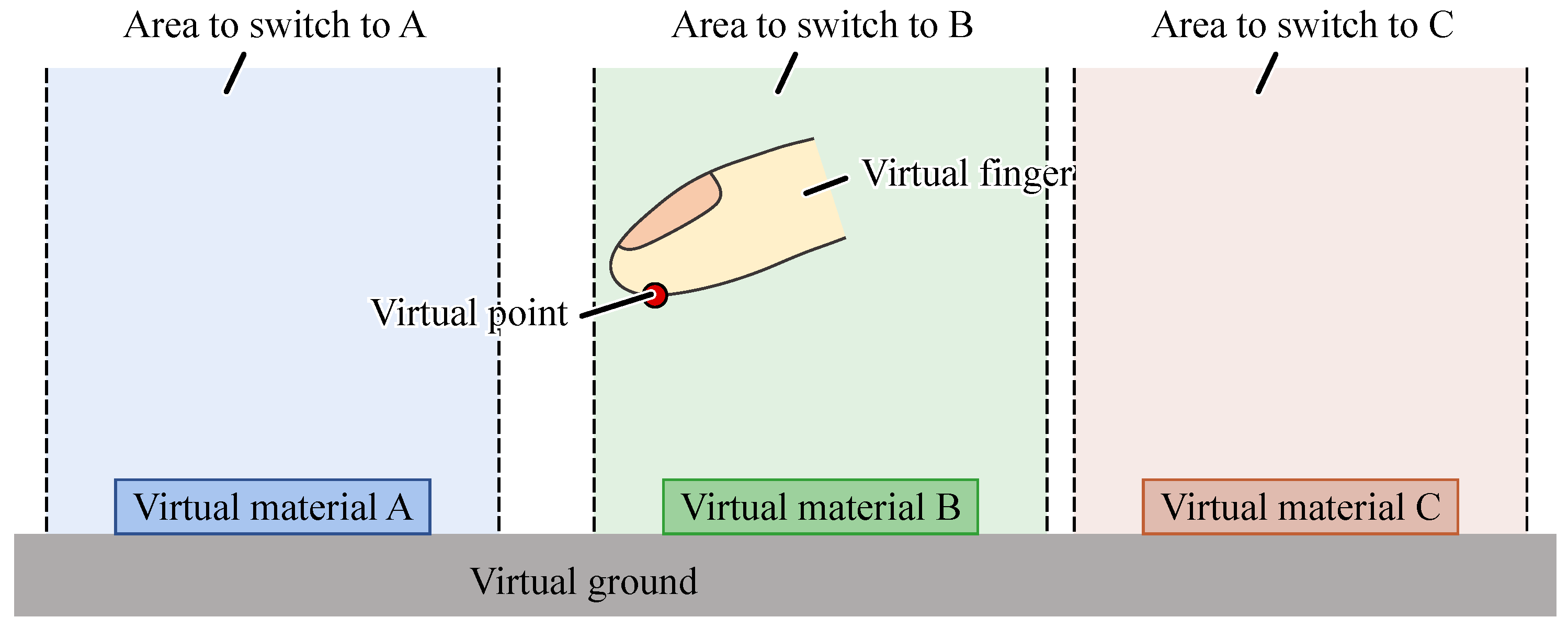
- Switching of target material: When the virtual finger is not in contact with the virtual object, the system moves the material that the finger would next contact directly under the finger. This feature is essential for presenting material properties simultaneously with the contact of the virtual object. In the device created for this study, multiple materials are placed on a single tape. If the position of the next material to be touched is far from the current material, there will be a delay in bringing the actual material to the position under the finger. Therefore, by simply predicting the material, the user will know they will touch it next before actually touching it, and preparing the corresponding actual material in advance, the material’s characteristics can be presented without delay.
- Presentation of contact and non-contact states between the material and the finger: The grip mechanism moves vertically in sync with the contact and non-contact states of the virtual finger and the virtual object. This ensures that the tactile sensation of contact or non-contact is consistent between the real and virtual environments.
2.3.1. Stroking Motion Reproduction
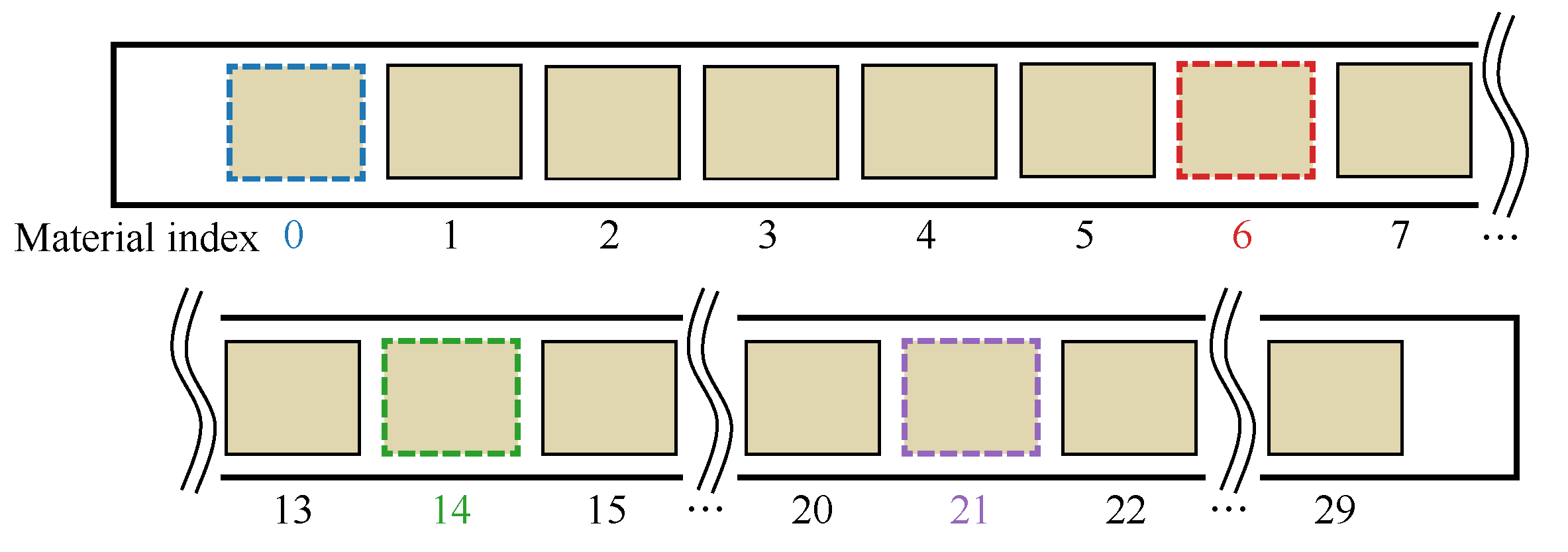
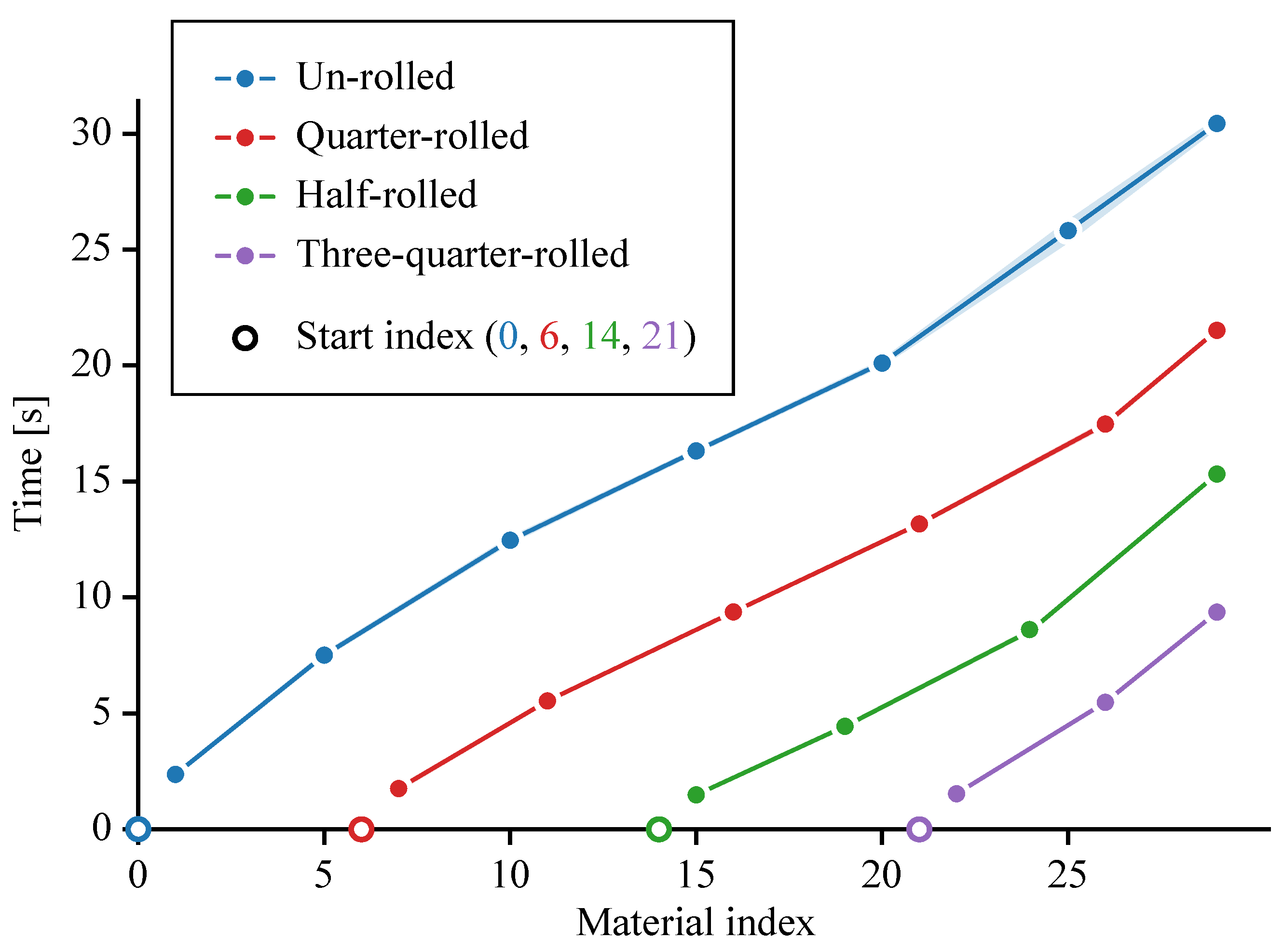
2.3.2. Target Material Switching
2.3.3. Contact and Non-Contact Presentation
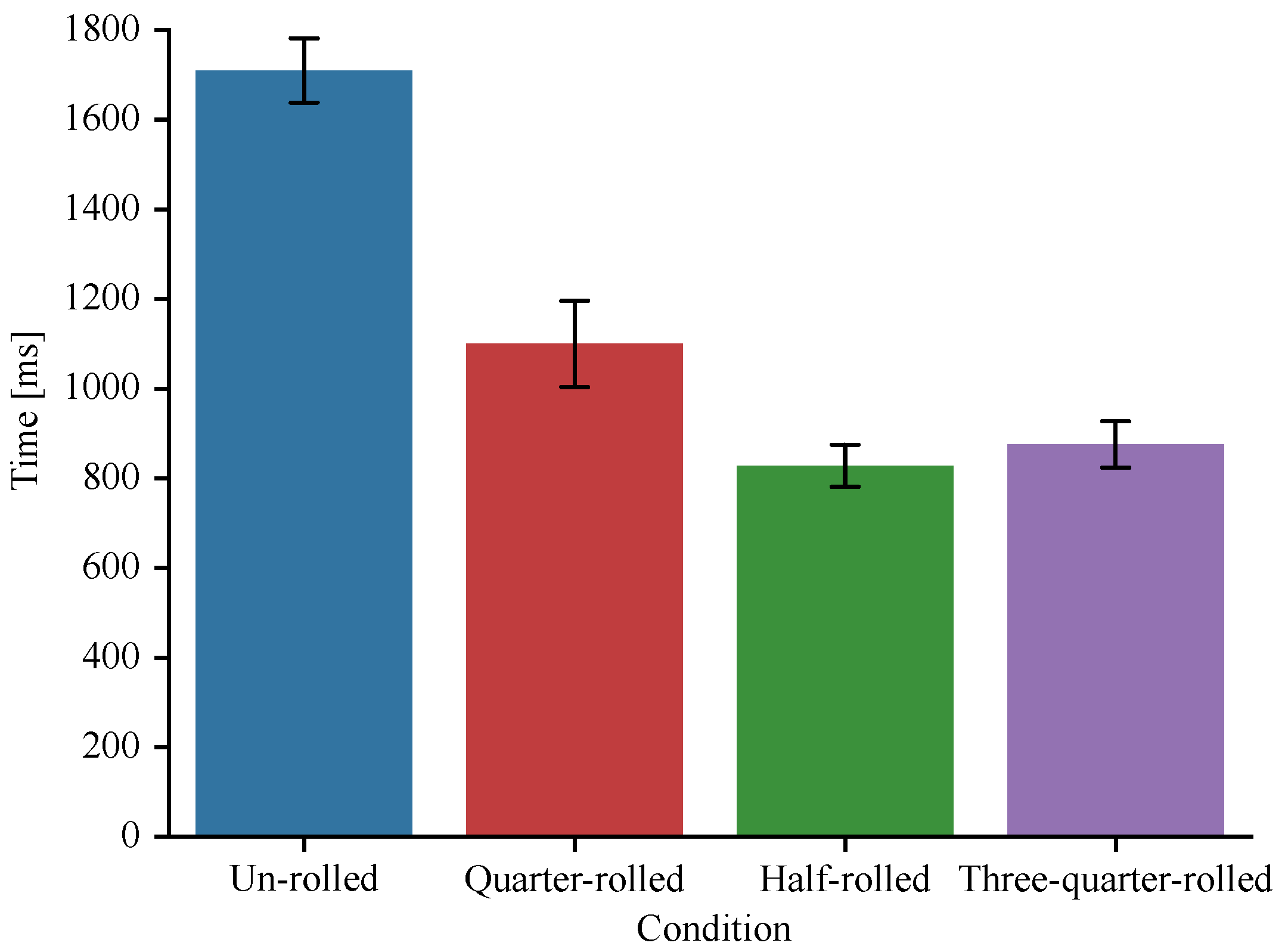
3. Experiment 1: Measurement of Time Required for Material Switching
3.1. Objective
3.2. Experimental Conditions
3.3. Experimental Procedure
3.4. Results
4. Experiment 2: Material Discrimination
4.1. Objective
4.2. Experimental Conditions
4.3. Experimental Procedure
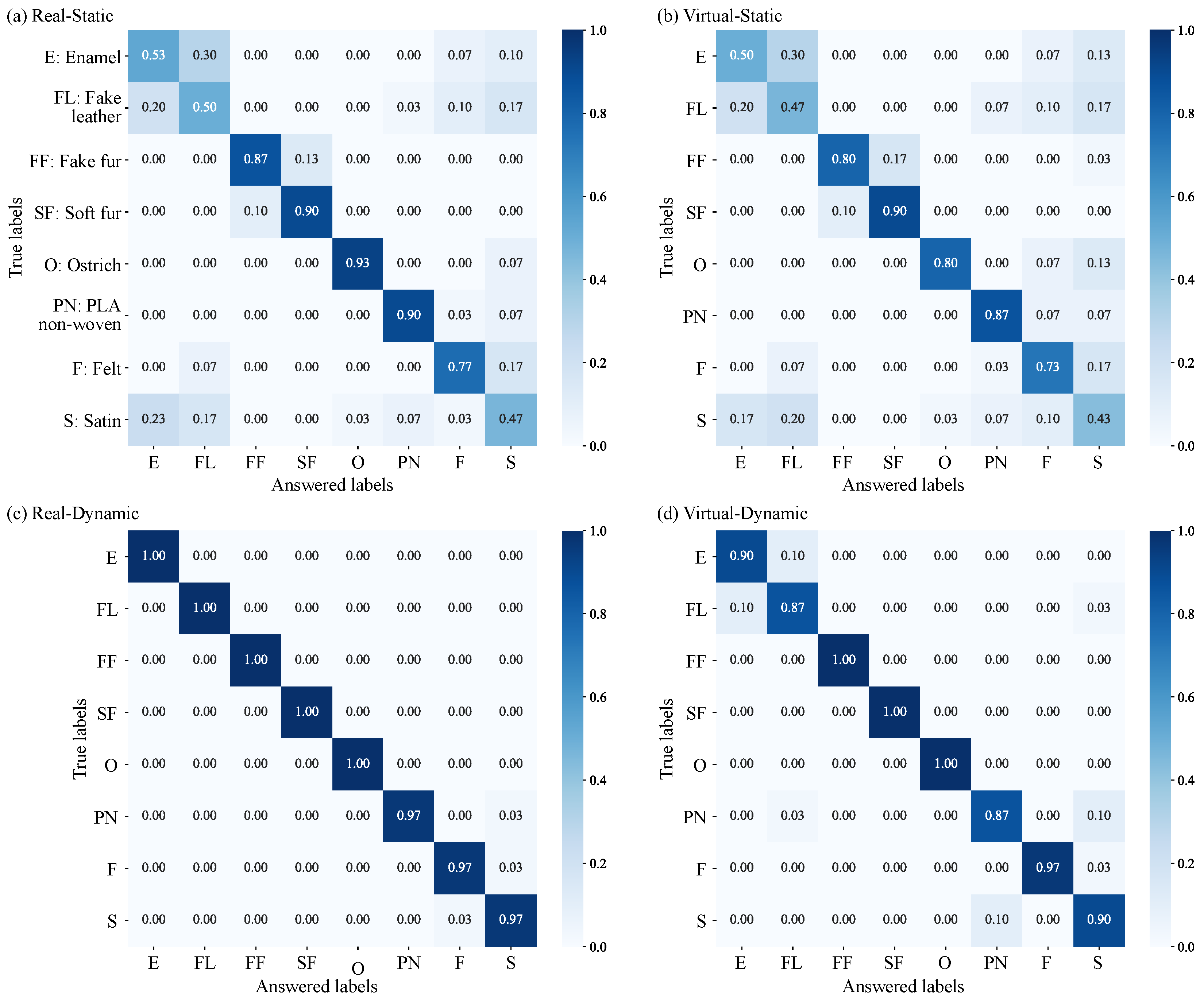
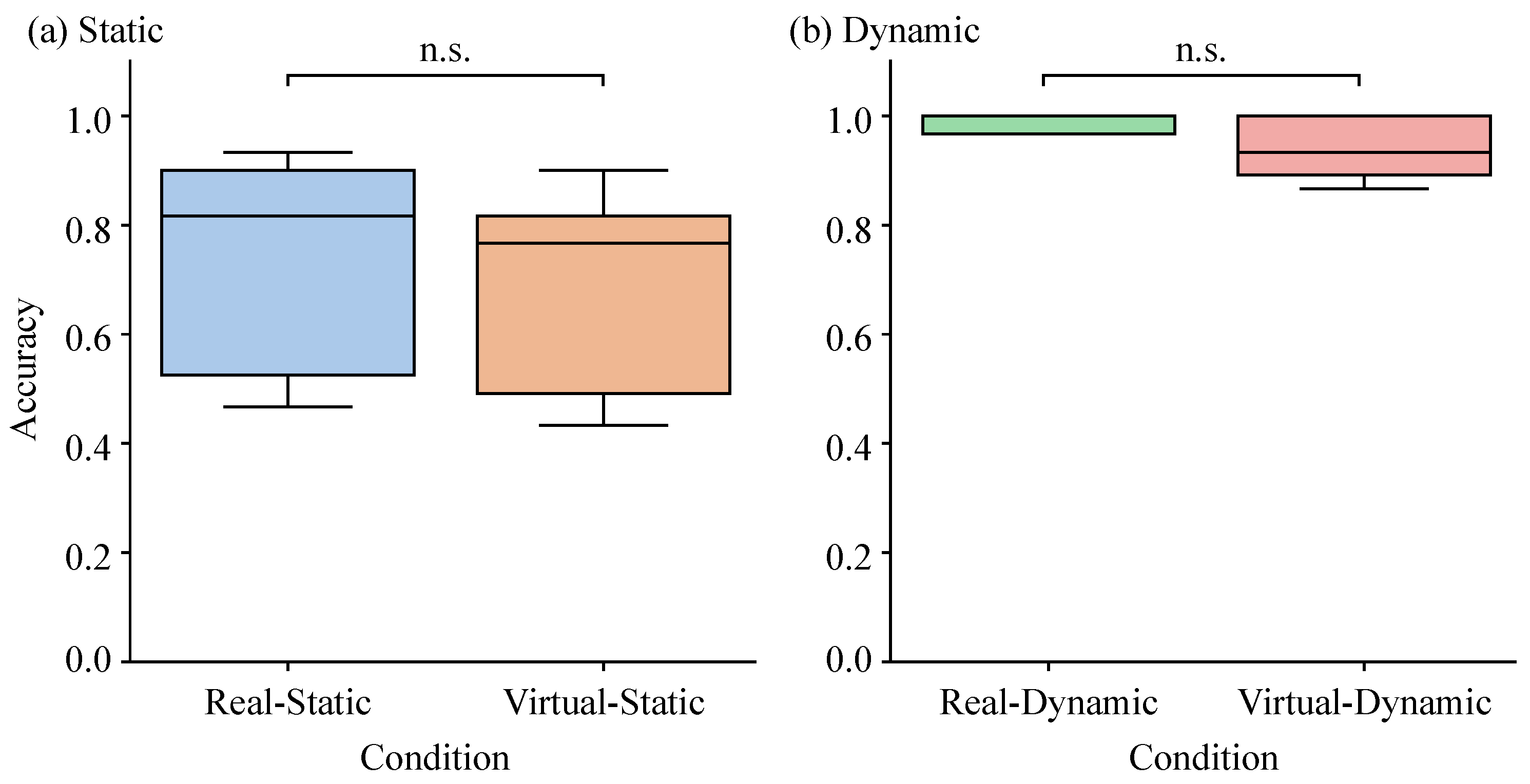
4.4. Results
5. Discussion
5.1. Material Switching Time
5.2. Increase in the Traceable Distance of Materials
5.3. Methods for Enhancing Texture Variety
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, S.; Kuchenbecker, K.J. Vibrotactile display: Perception, technology, and applications. Proc. IEEE 2012, 101, 2093–2104. [Google Scholar] [CrossRef]
- Okamoto, S.; Nagano, H.; Yamada, Y. Psychophysical dimensions of tactile perception of textures. IEEE Trans. Haptics 2012, 6, 81–93. [Google Scholar] [CrossRef] [PubMed]
- Konyo, M.; Yamada, H.; Okamoto, S.; Tadokoro, S. Alternative Display of Friction Represented by Tactile Stimulation without Tangential Force. In Proceedings of the EuroHaptics 2008, Madrid, Spain, 11–13 June 2008. [Google Scholar]
- Provancher, W.R.; Sylvester, N.D. Fingerpad skin stretch increases the perception of virtual friction. IEEE Trans. Haptics 2009, 2, 212–223. [Google Scholar] [CrossRef] [PubMed]
- Iizuka, S.; Nagano, H.; Konyo, M.; Tadokoro, S. Toward multi-finger haptic interaction: Presenting vibrotactile stimuli from proximal phalanges to fingertips. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 905–911. [Google Scholar]
- Lo, J.Y.; Huang, D.Y.; Sun, C.K.; Hou, C.E.; Chen, B.Y. RollingStone: Using single slip taxel for enhancing active finger exploration with a virtual reality controller. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, Berlin, Germany, 14–17 October 2018; pp. 839–851. [Google Scholar]
- Choi, I.; Ofek, E.; Benko, H.; Sinclair, M.; Holz, C. Claw: A multifunctional handheld haptic controller for grasping, touching, and triggering in virtual reality. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–27 April 2018; pp. 1–13. [Google Scholar]
- Asano, S.; Okamoto, S.; Matsuura, Y.; Nagano, H.; Yamada, Y. Vibrotactile display approach that modifies roughness sensations of real textures. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 1001–1006. [Google Scholar]
- Asano, S.; Okamoto, S.; Yamada, Y. Vibrotactile stimulation to increase and decrease texture roughness. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 393–398. [Google Scholar] [CrossRef]
- Lee, C.J.; Tsai, H.R.; Chen, B.Y. HairTouch: Providing Stiffness, Roughness and Surface Height Differences Using Reconfigurable Brush Hairs on a VR Controller. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Online, 8–13 May 2021; pp. 1–13. [Google Scholar]
- Ochiai, Y.; Hoshi, T.; Rekimoto, J.; Takasaki, M. Diminished haptics: Towards digital transformation of real world textures. In Proceedings of the International Conference on Human Haptic Sensing and Touch Enabled Computer Applications, Versailles, France, 24–26 June 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 409–417. [Google Scholar]
- Araujo, B.; Jota, R.; Perumal, V.; Yao, J.X.; Singh, K.; Wigdor, D. Snake charmer: Physically enabling virtual objects. In Proceedings of the TEI’16: Tenth International Conference on Tangible, Embedded, and Embodied Interaction, Eindhoven, The Netherlands, 14–17 February 2016; pp. 218–226. [Google Scholar]
- Whitmire, E.; Benko, H.; Holz, C.; Ofek, E.; Sinclair, M. Haptic revolver: Touch, shear, texture, and shape rendering on a reconfigurable virtual reality controller. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Mercado, V.; Marchal, M.; Lécuyer, A. Entropia: Towards infinite surface haptic displays in virtual reality using encountered-type rotating props. IEEE Trans. Vis. Comput. Graph. 2019, 27, 2237–2243. [Google Scholar] [CrossRef] [PubMed]
- Degraen, D.; Reindl, A.; Makhsadov, A.; Zenner, A.; Krüger, A. Envisioning haptic design for immersive virtual environments. In Proceedings of the Companion Publication of the 2020 ACM Designing Interactive Systems Conference, Eindhoven, The Netherlands, 6–10 July 2020; pp. 287–291. [Google Scholar]
- Takizawa, N.; Yano, H.; Iwata, H.; Oshiro, Y.; Ohkohchi, N. Encountered-type haptic interface for representation of shape and rigidity of 3d virtual objects. IEEE Trans. Haptics 2017, 10, 500–510. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.Y.; Ning, C.W.; Wang, P.Y.; Cheng, J.H.; Cheng, L.P. Haptic-go-round: A surrounding platform for encounter-type haptics in virtual reality experiences. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–10. [Google Scholar]
- Horie, A.; Saraiji, M.Y.; Kashino, Z.; Inami, M. Encounteredlimbs: A room-scale encountered-type haptic presentation using wearable robotic arms. In Proceedings of the 2021 IEEE Virtual Reality and 3D User Interfaces (VR), Virtual Conference, 27 March–3 April 2021; pp. 260–269. [Google Scholar]
- Mercado, V.R.; Marchal, M.; Lécuyer, A. “Haptics On-Demand”: A Survey on Encountered-Type Haptic Displays. IEEE Trans. Haptics 2021, 14, 449–464. [Google Scholar] [CrossRef] [PubMed]
- Dongye, X.; Weng, D.; Jiang, H.; Feng, L. A modular haptic agent system with encountered-type active interaction. Electronics 2023, 12, 2069. [Google Scholar] [CrossRef]
- Yamaguchi, S.; Shionoiri, H.; Nakamura, T.; Kajimoto, H. An encounter type VR system aimed at exhibiting wall material samples for show house. In Proceedings of the 2018 ACM International Conference on Interactive Surfaces and Spaces, Tokyo, Japan, 25–28 November 2018; pp. 321–326. [Google Scholar]
- Chan, V.H.; Chan, Y.C.; Peng, P.H.; Cheng, L.P. TexelBlocks: Dynamic Surfaces for Physical Interactions. In Proceedings of the Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 8–13 May 2021; pp. 1–5. [Google Scholar]
- Yokosaka, T.; Kuroki, S.; Watanabe, J.; Nishida, S. Linkage between free exploratory movements and subjective tactile ratings. IEEE Trans. Haptics 2016, 10, 217–225. [Google Scholar] [CrossRef] [PubMed]
- Nagano, H.; Okamoto, S.; Yamada, Y. Modeling semantically multilayered affective and psychophysical responses toward tactile textures. IEEE Trans. Haptics 2018, 11, 568–578. [Google Scholar] [CrossRef] [PubMed]
- Callier, T.; Saal, H.P.; Davis-Berg, E.C.; Bensmaia, S.J. Kinematics of unconstrained tactile texture exploration. J. Neurophysiol. 2015, 113, 3013–3020. [Google Scholar] [CrossRef] [PubMed]
- Lederman, S.J. Tactile roughness of grooved surfaces: The touching process and effects of macro-and microsurface structure. Percept. Psychophys. 1974, 16, 385–395. [Google Scholar] [CrossRef]
- Cascio, C.J.; Sathian, K. Temporal cues contribute to tactile perception of roughness. J. Neurosci. 2001, 21, 5289–5296. [Google Scholar] [CrossRef] [PubMed]
- Punpongsanon, P.; Iwai, D.; Sato, K. Softar: Visually manipulating haptic softness perception in spatial augmented reality. IEEE Trans. Vis. Comput. Graph. 2015, 21, 1279–1288. [Google Scholar] [CrossRef] [PubMed]
- Ujitoko, Y.; Ban, Y.; Hirota, K. Modulating fine roughness perception of vibrotactile textured surface using pseudo-haptic effect. IEEE Trans. Vis. Comput. Graph. 2019, 25, 1981–1990. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | The Number of Materials | Reference |
|---|---|---|
| Grounded | 7 | [12] |
| Grounded | 3 (possible to increase) | [14] |
| Grounded | 4 | [22] |
| Grounded | 4 | [21] |
| Handheld | 4 | [13] |
| Handheld | 6 | [15] |
| Condition | p-Value | |
|---|---|---|
| Unrolled | 0.99 | |
| Quarter rolled | 0.99 | |
| Half-rolled | 0.98 | 0.010 |
| Three-quarter rolled | 0.99 | 0.049 |
| Comparison | p-Value | Cohen’s d |
|---|---|---|
| Real–Static vs. Virtual–Static | 0.0520 | 0.2664 |
| Real–Dynamic vs. Virtual–Dynamic | 0.2176 | 1.0000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maezono, K.; Nagano, H.; Tazaki, Y.; Yokokohji, Y. MateREAL Touch: Handheld Haptic Texture Display with Real Rolling Materials. Electronics 2025, 14, 1250. https://doi.org/10.3390/electronics14071250
Maezono K, Nagano H, Tazaki Y, Yokokohji Y. MateREAL Touch: Handheld Haptic Texture Display with Real Rolling Materials. Electronics. 2025; 14(7):1250. https://doi.org/10.3390/electronics14071250
Chicago/Turabian StyleMaezono, Katsuya, Hikaru Nagano, Yuichi Tazaki, and Yasuyoshi Yokokohji. 2025. "MateREAL Touch: Handheld Haptic Texture Display with Real Rolling Materials" Electronics 14, no. 7: 1250. https://doi.org/10.3390/electronics14071250
APA StyleMaezono, K., Nagano, H., Tazaki, Y., & Yokokohji, Y. (2025). MateREAL Touch: Handheld Haptic Texture Display with Real Rolling Materials. Electronics, 14(7), 1250. https://doi.org/10.3390/electronics14071250