
Compensation of Current Sensor Faults in Vector-Controlled Induction Motor Drive Using Extended Kalman Filters



Abstract
1. Introduction
2. Mathematical Models and Methods
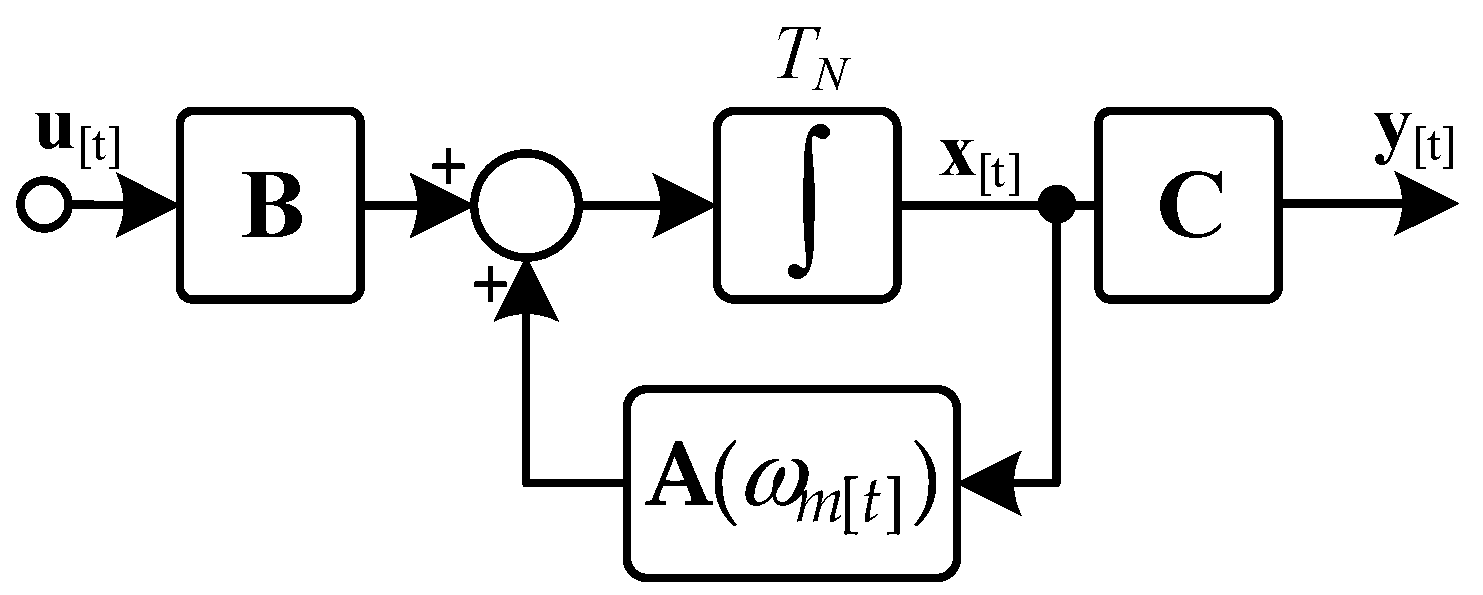
2.1. Mathematical Model of the Induction Motor
- The stator and rotor cage windings are considered concentrated windings;
- The machine is treated as an ideal three-phase symmetrical motor;
- The air gap is assumed to be uniform;
- The effects of anisotropy, magnetic saturation, hysteresis phenomena, and eddy currents are neglected;
- Higher harmonics of the spatial field distribution in the air gap are neglected (only the fundamental harmonic is considered);
- Resistances and inductances of the machine windings are treated as constant.
2.2. Mathematical Model of the Extended Kalman Filter
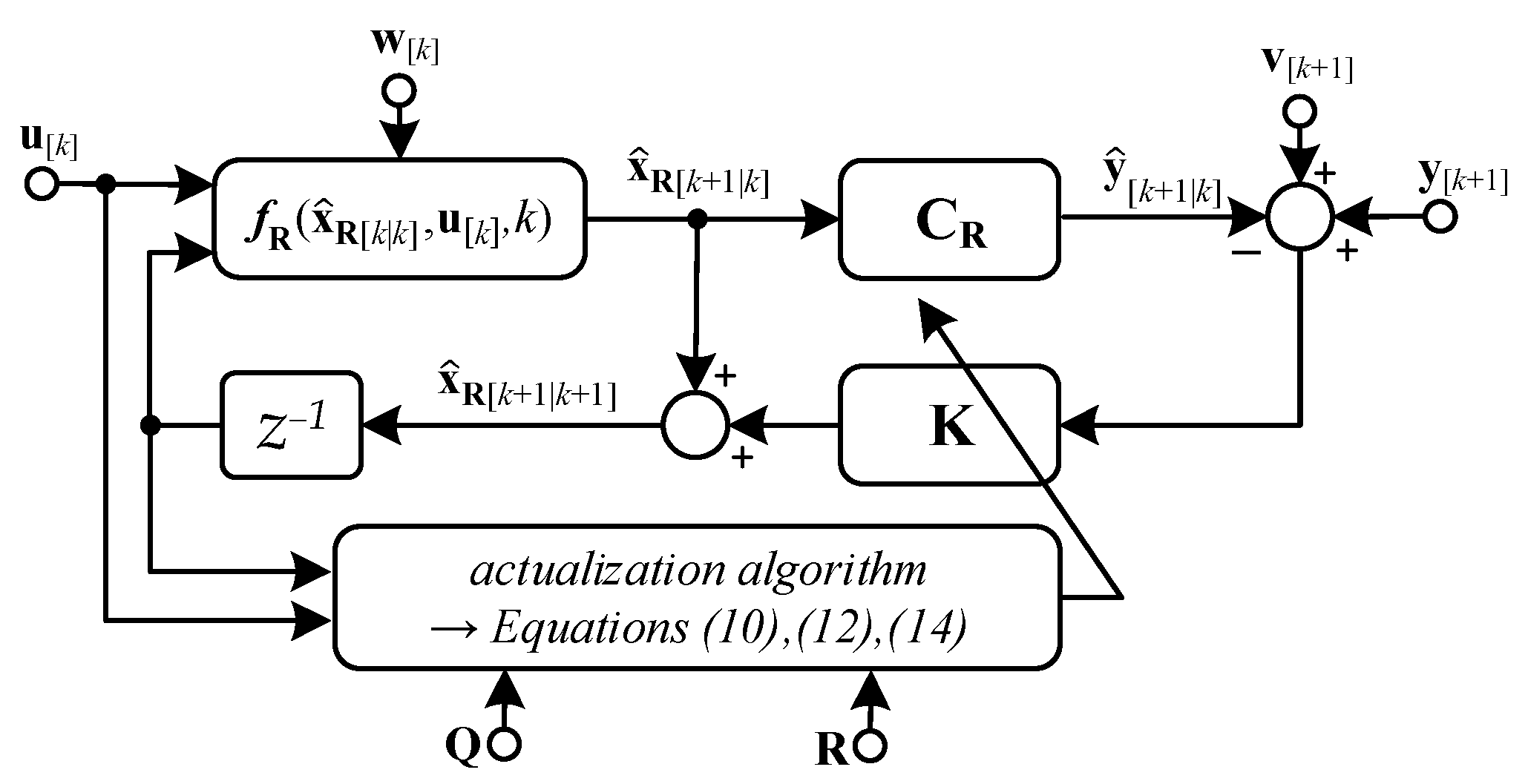
2.2.1. General Model and the Calculation Algorithm of the Extended Kalman Filter
- Step 1—calculation of the value of the state vector predictor at the sampling step (k + 1) based on the input u[k] and the state estimate at the previous moment (k):
- Step 2—calculation of the state prediction error covariance matrix:
- Step 3—calculation of the EKF gain matrix:
- Step 4—calculation of the adjusted state vector estimate:
- Step 5—calculation of the estimate error covariance matrix:
- Step 6—back to step one.
2.2.2. Mathematical Model of the Classical Extended Kalman Filters for Rotor Resistance Estimation
- Output vector:
- Input vector:
- Extended output matrix:
- Extended input matrix:
- Extended state matrix:
2.2.3. Mathematical Models of the Modified Extended Kalman Filters for Rotor and Stator Resistance Estimation
3. Research Scenarios
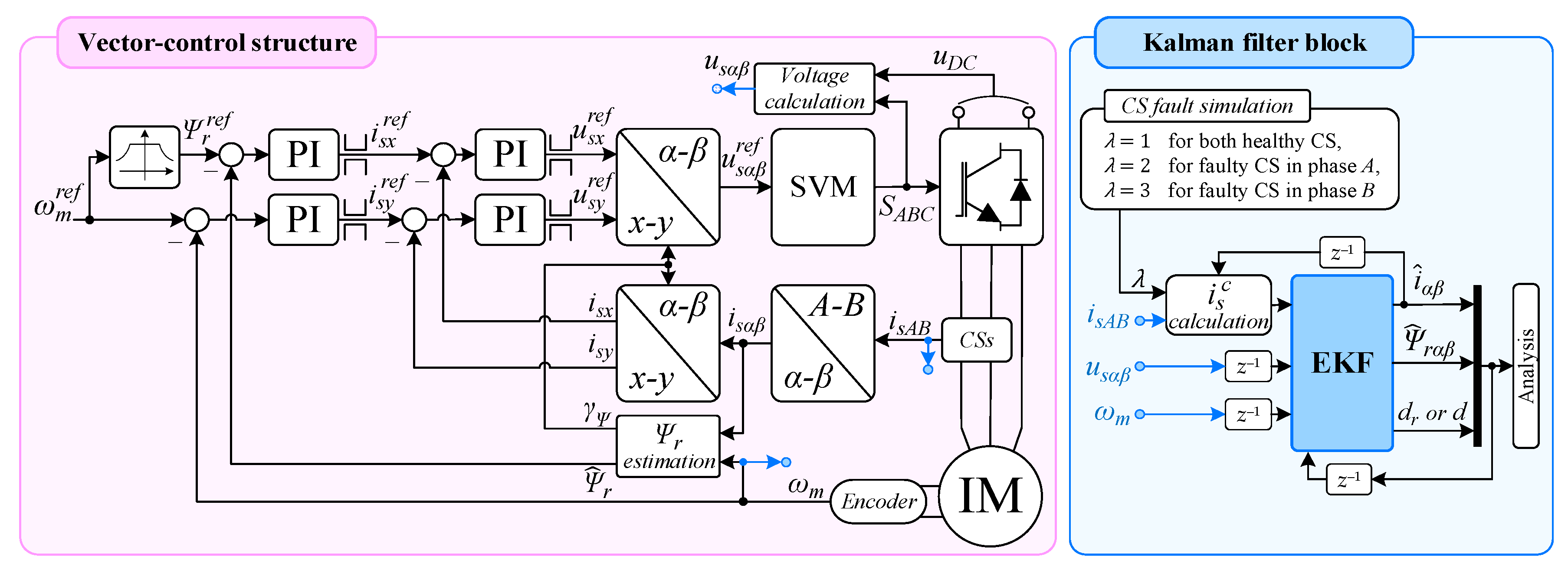
3.1. Simulation Details and Research Scenarios
3.2. Methodology for Testing the Quality of Stator Current Estimation Using EKFs
- −
- first, the influence of the elements of the Q matrix for EKF1 on the quality of state variable estimation, in particular the stator current, in the presence of changes in the IM parameters and the occurrence of CS damages in phases A and B of the stator winding;
- −
- then, considering the conclusions resulting from the first stage of research, the quality of stator current estimation provided by EKF1 and EKF2 was compared.
- The matrix R is considered constant and diagonal, with a value determined according to [30] as: ;
- Initial conditions for EKFs: , ;
- Matrix Q is diagonal;
- the influence of only elements q11 and q22 of the Q matrix is examined, each of which can have values in the following range: ; these values mostly influence the current estimation quality;
- The remaining elements of the Q matrix (q33, q44, and q55) are considered constants, with values 10−10;
- The tests are carried out for both motoring and regenerating mode, for speed range , and load torque , assuming changes in the motor model parameters (rr, rs, and lm) within the range of ± 25% of the rated value for three fault situations: failure-free (λ = 1), with CS damage in phase A (λ = 2) and with damage in phase B (λ = 3);
- Additionally, the situation in which both the stator and the rotor resistance changes is considered. The parameters were changed only in the motor model.
4. Analysis of the Results
4.1. Influence of the Q Matrix for EKF1 on the Quality of Current Estimation
- For failure-free CSs: {q11; q22} = {10−7; 10−7};
- For sensor damage in phase A or phase B: {q11; q22} = {8 × 10−9; 8 × 10−9}.
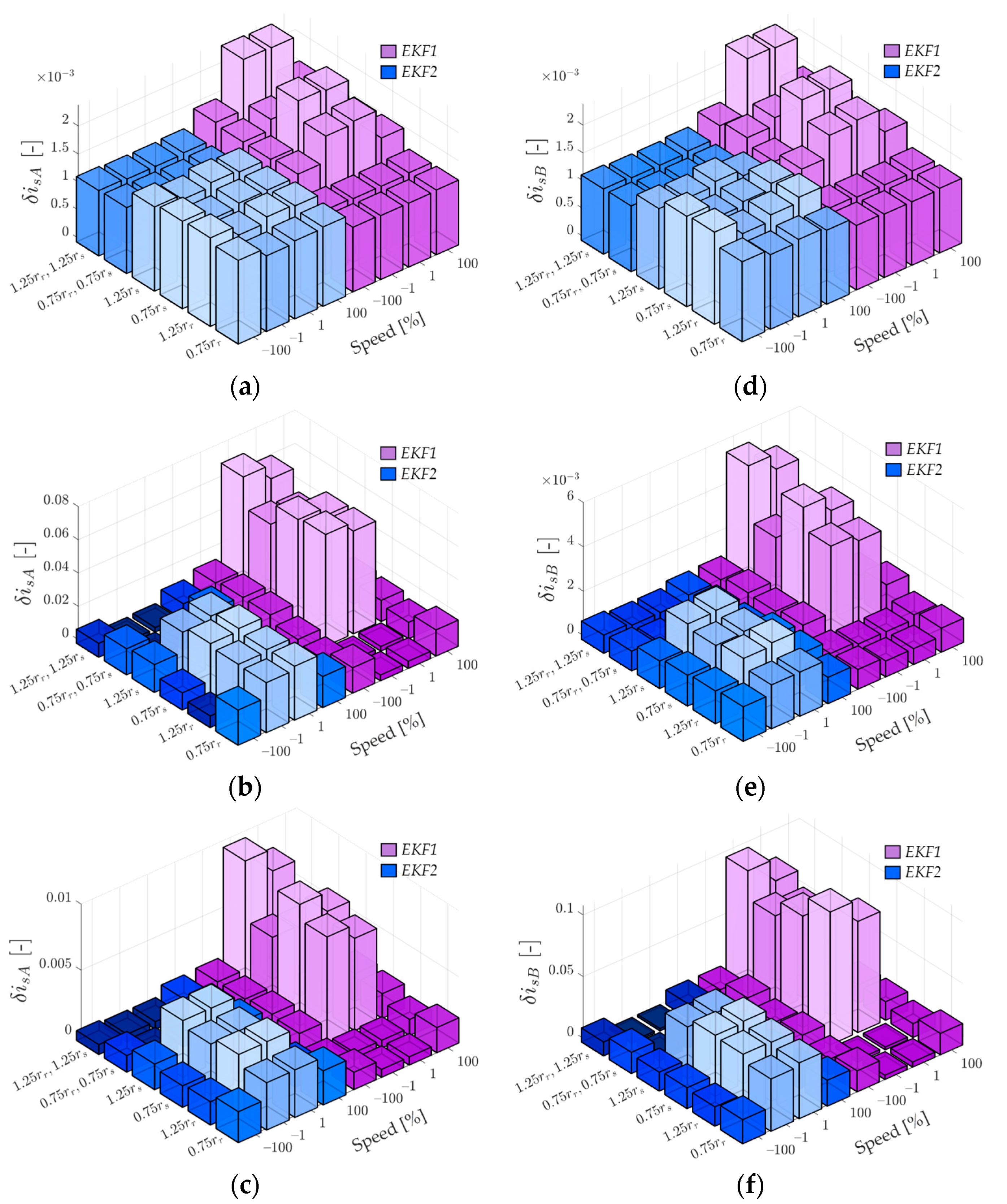
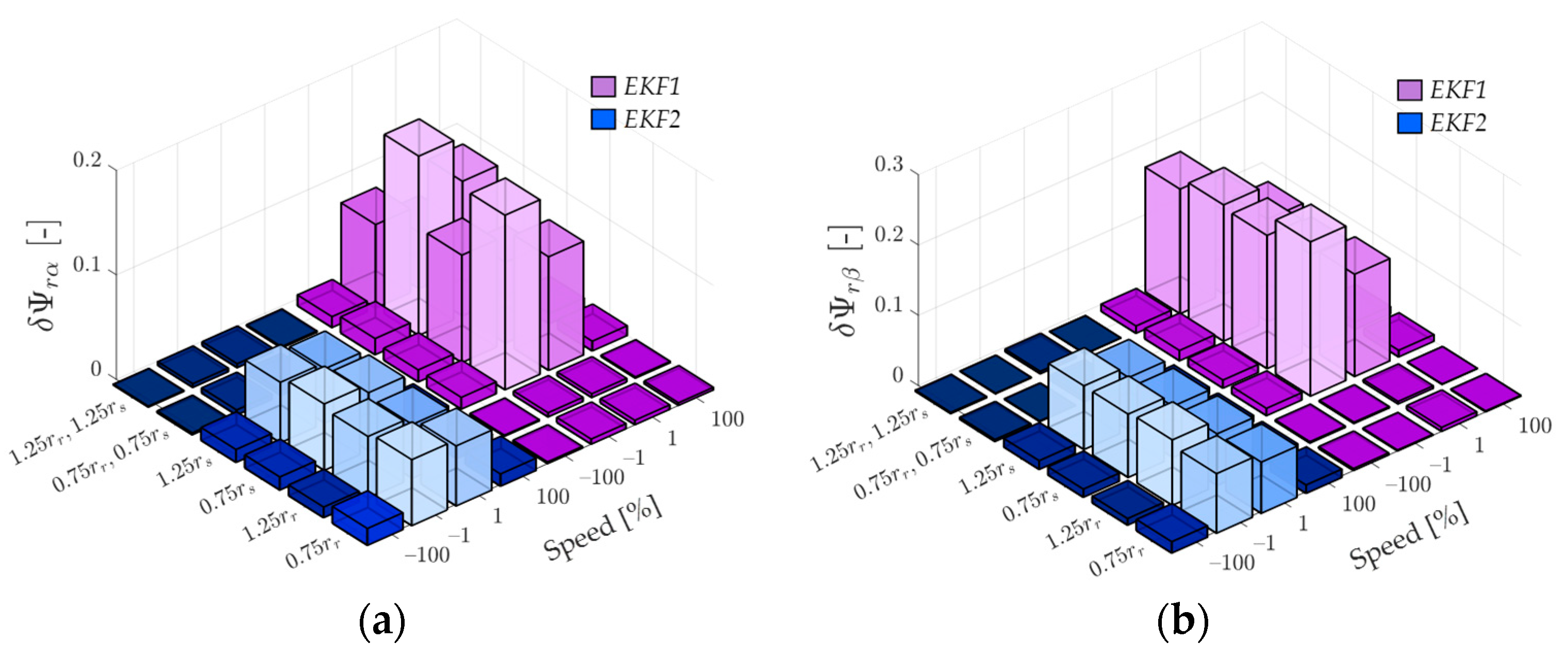
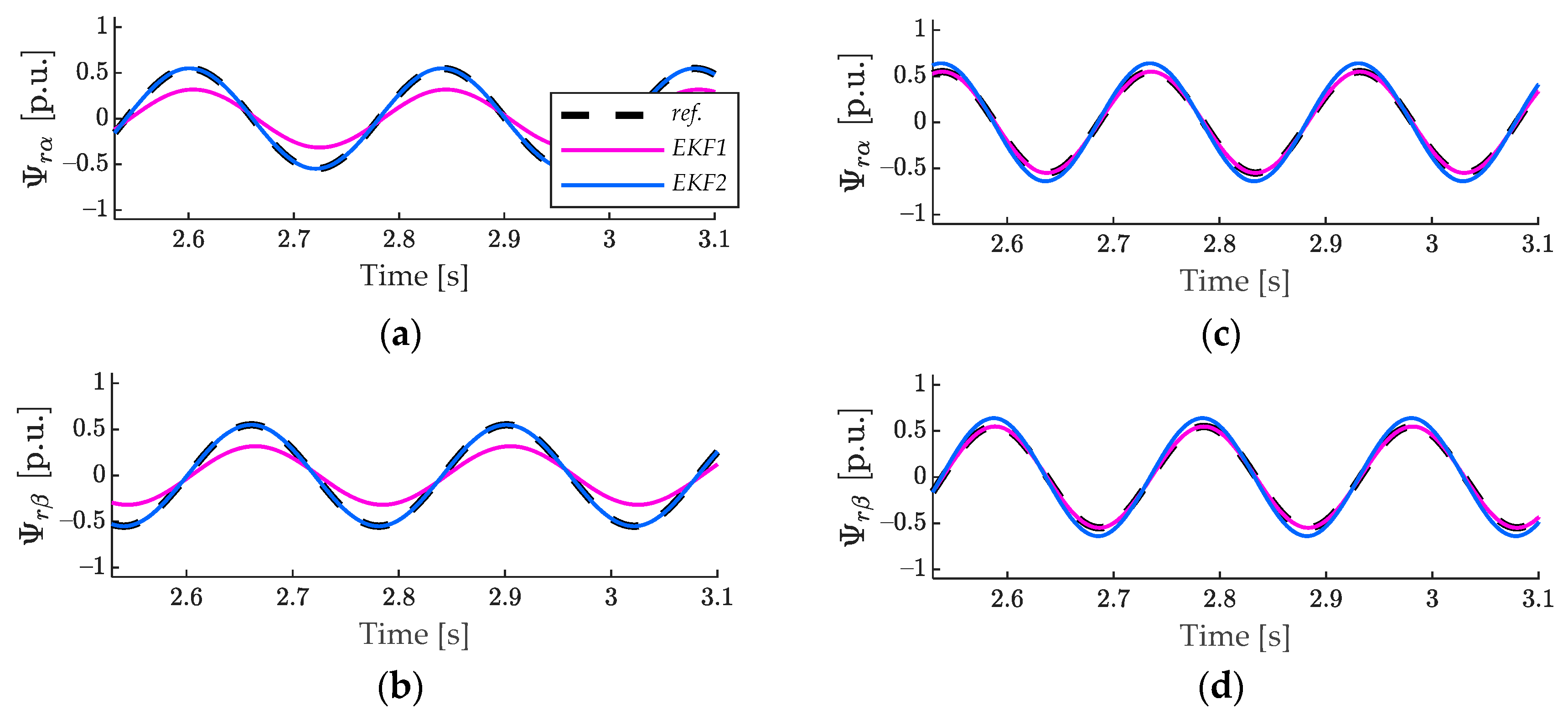
4.2. Analysis of the Quality of Stator Current Estimation Using EKF1 and EKF2
5. Conclusions
- Correct selection of the Q matrix for the Kalman filter is particularly important in the event of damage to the CS.
- To ensure the highest quality stator current estimation, tuning the Q matrix depending on the current operating point (both speed and load) is recommended.
- The worst quality of estimation is obtained in states characterized by low current variability, which corresponds to operation at low speeds and low loads (especially in regenerating mode).
- Extending the state vector with a general coefficient of resistance change, considering changes in both rotor and stator resistance, allows for increasing the accuracy of the estimation of electromagnetic state variables while maintaining the simplicity of the EKF algorithm. With this approach, a significant deterioration of the estimate occurs only in the case of changes in only the rotor resistance. Since this situation does not occur on a real drive, this defect does not matter.
- The adopted way of calculation of the corrected stator currents, taking into account the available measured and estimated currents makes it possible to properly calculate the state estimation error in the EKF algorithm.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | [ph.u.] | [p.u.] |
|---|---|---|
| Rated phase voltage, UN | 230 V | 0.707 |
| Rated phase current, IN | 2.5 A | 0.707 |
| Rated power, PN | 1.1 kW | 0.638 |
| Rated speed, nN | 1390 rpm | 0.927 |
| Rated torque, TeN | 7.56 Nm | 0.688 |
| Number of pole pairs, pb | 2 | - |
| Rotor winding resistance, Rr | 4.968 Ω | 0.0540 |
| Stator winding resistance, Rs | 5.114 Ω | 0.0556 |
| Rotor leakage inductance, Lσr | 31.6 mH | 0.1079 |
| Stator leakage inductance, Lσs | 31.6 mH | 0.1079 |
| Main inductance, Lm | 541.7 mH | 1.8498 |
| Rated rotor flux, ΨrN | 0.7441 Wb | 0.7187 |
| Mechanical time constant, TM | 0.25 s | - |
References
- Isermann, R. Fault-Diagnosis Applications, Model-Based Condition Monitoring: Actuators, Drives, Machinery, Plants, Sensors, and Fault-Tolerant Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Muenchhof, M.; Beck, M.; Isermann, R. Fault-tolerant actuators and drives—Structures, fault detection principles and applications. Annu. Rev. Control 2009, 33, 136–148. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Kowalski, C.T.; Dybkowski, M. Fault-Diagnosis and Fault-Tolerant-Control in Industrial Processes and Electrical Drives. In Advanced Control of Electrical Drives and Power Electronic Converters; Kabzinski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 101–120. [Google Scholar] [CrossRef]
- Dybkowski, M.; Klimkowski, K.; Orlowska-Kowalska, T. Speed and Current Sensor Fault-Tolerant-Control of the Induction Motor Drive. In Advanced Control of Electrical Drives and Power Electronic Converters; Kabzinski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 141–167. [Google Scholar] [CrossRef]
- Salmasi, F.R. A Self-Healing Induction Motor Drive with Model Free Sensor Tampering and Sensor Fault Detection, Isolation, and Compensation. IEEE Trans. Ind. Electron. 2017, 64, 6105–6115. [Google Scholar] [CrossRef]
- Chakraborty, C.; Verma, V. Speed and Current Sensor Fault Detection and Isolation Technique for Induction Motor Drive Using Axes Transformation. IEEE Trans. Ind. Electron. 2015, 62, 1943–1954. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, Y.; Wang, B.; Huang, X.; Xu, D. Current Sensor Fault Diagnosis and Tolerant Control for VSI-Based Induction Motor Drives. IEEE Trans. Power Electron. 2018, 33, 4238–4248. [Google Scholar] [CrossRef]
- Zuo, Y.; Ge, X.; Chang, Y.; Chen, Y.; Xie, D.; Wang, H.; Woldegiorgis, A.T. Current Sensor Fault-Tolerant Control for Speed-Sensorless Induction Motor Drives Based on the SEPLL Current Reconstruction Scheme. IEEE Trans. Ind. Appl. 2023, 59, 845–856. [Google Scholar] [CrossRef]
- Adamczyk, M.; Orlowska-Kowalska, T. Self-Correcting Virtual Current Sensor Based on the Modified Luenberger Observer for Fault-Tolerant Induction Motor Drive. Energies 2021, 14, 6767. [Google Scholar] [CrossRef]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Cardoso, A.J.M. Current sensors fault detection and tolerant control strategy for three-phase induction motor drives. Electr. Eng. 2021, 103, 881–898. [Google Scholar] [CrossRef]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Cardoso, A.J.M. High-performance vector control without AC phase current sensors for induction motor drives: Simulation and real-time implementation. ISA Trans. 2021, 109, 296–306. [Google Scholar] [CrossRef] [PubMed]
- Adamczyk, M.; Orlowska-Kowalska, T. Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors 2019, 19, 4979. [Google Scholar] [CrossRef] [PubMed]
- Manohar, M.; Das, S. Current sensor fault-tolerant control for direct torque control of induction motor drive using flux linkage observer. IEEE Trans. Ind. Informat. 2017, 13, 2824–2833. [Google Scholar] [CrossRef]
- Gholipour, A.; Ghanbari, M.; Alibeiki, E.; Jannati, M. Speed sensorless fault-tolerant control of induction motor drives against current sensor fault. Electr. Eng. 2021, 103, 1493–1513. [Google Scholar] [CrossRef]
- Salmasi, F.R.; Najafabadi, T.A. An Adaptive Observer with Online Rotor and Stator Resistance Estimation for Induction Motors with One Phase Current Sensor. IEEE Trans. Energy Convers. 2011, 26, 959–966. [Google Scholar] [CrossRef]
- Barut, M.; Demir, R.; Zerdali, E.; Inan, R. Real-Time Implementation of Bi Input-Extended Kalman Filter-Based Estimator for Speed-Sensorless Control of Induction Motors. IEEE Trans. Ind. Electron. 2012, 59, 4197–4206. [Google Scholar] [CrossRef]
- Chiang, C.; Wang, Y.; Cheng, W. EKF-based Rotor and Stator Resistance Estimation in Speed Sensorless Control of Induction Motors. In Proceedings of the 2012 American Control Conference, Montreal, QC, Canada, 27–29 June 2012. [Google Scholar] [CrossRef]
- Horváth, K.; Kuslits, M. Dynamic Performance of Estimator-Based Speed Sensorless Control of Induction Machines Using Extended and Unscented Kalman Filters. Power Electron. Drives 2018, 3, 129–144. [Google Scholar] [CrossRef]
- Doan, P.T.; Bui, T.L.; Kim, H.K.; Byun, G.S.; Kim, S.B. Rotor Speed Estimation Based on Extended Kalman Filter for Sensorless Vector Control of Induction Motor. In Recent Advances in Electrical Engineering and Related Sciences; Lecture Notes in Electrical Engineering; Zelinka, I., Duy, V., Cha, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 477–486. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. Extended Kalman Filter Based Speed-Sensorless Load Torque and Inertia Estimations with Observability Analysis for Induction Motors. Power Electron. Drives 2018, 3, 115–127. [Google Scholar] [CrossRef]
- Barut, M.; Bogosyan, S.; Gokasan, M. Experimental evaluation of braided EKF for sensorless control of induction motors. IEEE Trans. Ind. Electron. 2008, 55, 620–632. [Google Scholar] [CrossRef]
- Barut, M.; Bogosyan, S.; Gokasan, M. Switching EKF technique for rotor and stator resistance estimation in speed sensorless control of IMs. Energy Convers. Manag. 2007, 48, 3120–3134. [Google Scholar] [CrossRef]
- Barut, M.; Bogosyan, S.; Gokasan, M. Braided extended Kalman filters for sensorless estimation in induction motors at high-low/zero speed. IET Control. Theory Appl. 2007, 1, 987–998. [Google Scholar] [CrossRef]
- Yildiz, R.; Barut, M.; Demir, R. Extended Kalman filter based estimations for improving speed-sensored control performance of induction motors. IET Electr. Power Appl. 2020, 14, 2471–2479. [Google Scholar] [CrossRef]
- Demir, R.; Barut, M.; Yildiz, R.; Inan, R.; Zerdali, E. EKF Based Rotor and Stator Resistance Estimations for Direct Torque Control of Induction Motors. In Proceedings of the 2017 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 25–27 May 2017. [Google Scholar] [CrossRef]
- Rayyam, M.; Zazi, M.; Hajji, Y.; Chtouki, I. Stator and rotor faults detection in Induction Motor (IM) using the Extended Kalman Filter (EKF). In Proceedings of the in 2016 International Conference on Electrical and Information Technologies (ICEIT), Tangiers, Morocco, 4–7 May 2016. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. The Optimization of EKF Algorithm based on Current Errors for Speed-Sensorless Control of Induction Motors. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015. [Google Scholar] [CrossRef]
- Zerdali, E.; Yildiz, R. A study on improving the state estimation of induction motor. Electr. Eng. 2023, 105, 2471–2483. [Google Scholar] [CrossRef]
- Laroche, E.; Sedda, E.; Durieu, C. Methodological insights for online estimation of induction motor parameters. IEEE Trans. Control. Syst. Technol. 2008, 16, 1021–1028. [Google Scholar] [CrossRef]



| Feature: | [5] | [6] | [7] | [8] | [9] | [10,11] | [12] | [13] | [14] | [15] | This Paper |
|---|---|---|---|---|---|---|---|---|---|---|---|
| concerns any CS fault | No | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| sensitive to changes in motor resistance | No | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes | No | No |
| include feedback from current estimation error | No | No | Yes | Yes | Yes | No | No | No | No | Yes | Yes |
| additional parameters required | Yes | No | No | Yes | Yes | Yes | No | No | Yes | Yes | Yes |
| noise filtering properties | No | No | No | No | No | No | No | No | Yes | No | Yes |
| at least one available CS required | Yes | Yes | Yes | No * | No * | No | No | No | No | Yes | No * |
| speed measurement required | No | No | Yes | No | Yes | Yes | Yes | Yes | No | Yes | Yes |
| computation burden | L | L | H | H | M | M | L | M | H | M | H |
| q11/q22 | 1% of ωmN | 100% of ωmN | Load Torque tL | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 10−7 | 10−8 | 8 × 10−9 | 10−9 | 10−10 | 10−7 | 10−8 | 8 × 10−9 | 10−9 | 10−10 | ||
| 10−7 | 16.25 | 18.41 | 18.77 | 21.36 | 22.48 | 10.16 | 9.17 | 9.17 | 9.19 | 9.20 | tL = 5% |
| 10−8 | 16.61 | 14.64 | 14.72 | 16.61 | 17.90 | 9.10 | 4.94 | 4.84 | 4.67 | 4.69 | |
| 8 × 10−9 | 16.73 | 14.51 | 14.54 | 16.22 | 17.47 | 9.12 | 4.74 | 4.62 | 4.44 | 4.46 | |
| 10−9 | 17.40 | 14.35 | 14.14 | 14.24 | 15.39 | 9.33 | 3.91 | 3.73 | 3.55 | 3.70 | |
| 10−10 | 17.33 | 14.07 | 13.79 | 13.36 | X | 9.39 | 3.79 | 3.59 | 3.60 | 4.07 | |
| 10−7 | 20.19 | 25.67 | 26.60 | 35.07 | 39.98 | 27.07 | 21.33 | 21.18 | 20.60 | 20.51 | tL = 100% |
| 10−8 | 24.33 | 20.42 | 20.62 | 26.76 | 32.93 | 19.79 | 11.49 | 11.18 | 10.19 | 10.09 | |
| 8 × 10−9 | 24.92 | 20.45 | 20.56 | 26.06 | 32.18 | 19.42 | 10.95 | 10.62 | 9.57 | 9.48 | |
| 10−9 | 28.05 | 23.19 | 22.80 | 23.39 | 28.48 | 17.68 | 8.46 | 7.96 | 6.18 | 6.12 | |
| 10−10 | 28.45 | 25.33 | 24.99 | 24.39 | 32.32 | 17.34 | 8.04 | 7.51 | 5.71 | 6.03 | |
| q11/q22 | 1% of ωmN | 100% of ωmN | Load Torque tL | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 10−7 | 10−8 | 8 × 10−9 | 10−9 | 10−10 | 10−7 | 10−8 | 8 × 10−9 | 10−9 | 10−10 | ||
| 10−7 | 17.57 | 21.51 | 21.94 | 25.43 | 26.29 | 11.63 | 9.02 | 8.93 | 8.63 | 8.60 | tL = 5% |
| 10−8 | 16.96 | 17.83 | 17.91 | X | X | 12.11 | 6.69 | 6.38 | 4.92 | 4.66 | |
| 8 × 10−9 | 17.01 | 18.25 | 18.36 | X | X | 12.20 | 6.68 | 6.35 | 4.79 | 4.51 | |
| 10−9 | 17.51 | 19.57 | 21.36 | X | X | 12.72 | 6.96 | 6.59 | 4.47 | 4.01 | |
| 10−10 | 17.77 | 18.87 | 19.86 | 38.53 | X | 12.85 | 7.09 | 6.72 | 4.53 | 3.99 | |
| 10−7 | 20.16 | 26.24 | 27.28 | 36.75 | 42.79 | 30.55 | 23.71 | 23.53 | 22.90 | 22.82 | tL = 100% |
| 10−8 | 25.18 | 20.93 | 21.15 | 27.59 | 33.85 | 22.05 | 12.51 | 11.93 | 9.14 | 8.63 | |
| 8 × 10−9 | 25.91 | 21.06 | 21.18 | 27.00 | 33.11 | 21.65 | 12.21 | 11.62 | 8.60 | 8.03 | |
| 10−9 | 29.66 | 24.50 | 24.15 | 26.74 | 32.76 | 19.59 | 11.43 | 10.83 | 6.88 | 5.83 | |
| 10−10 | 29.49 | 26.19 | 25.92 | 97.56 | X | 19.15 | 11.38 | 10.82 | 6.85 | 5.67 | |
| ΔisA [%] | ΔisB [%] | |||||||
|---|---|---|---|---|---|---|---|---|
| Resistance/Speed [%] | −100% | −1% | 1% | 100% | −100% | −1% | 1% | 100% |
| rrIM = 0.75 rrN | −36.0 | <<−100 | <<−100 | −16.95 | −71.9 | <<−100 | <<−100 | −7.6 |
| rrIM = 1.25 rrN | 26.1 | <<−100 | <<−100 | 3.66 | −75.0 | <<−100 | <<−100 | −57.8 |
| rsIM = 0.75 rsN | 11.3 | 52.5 | 46.0 | 4.61 | −3.6 | 50.7 | 45.2 | 3.2 |
| rsIM = 1.25 rsN | −4.2 | 57.0 | 50.2 | −0.28 | −4.3 | 56.4 | 48.9 | 1.5 |
| rrIM = 0.75rrN; rsIM = 0.75 rsN | 2.8 | 93.1 | 91.2 | −4.15 | 28.1 | 77.0 | 76.6 | 33.9 |
| rrIM = 1.25 rrN; rsIM = 1.25 rsN | 42.2 | 97.1 | 95.6 | 20.40 | 21.6 | 87.6 | 85.8 | 13.1 |
| ΔisA [%] | ΔisB [%] | |||||||
|---|---|---|---|---|---|---|---|---|
| Resistance/Speed [%] | −100% | −1% | 1% | 100% | −100% | −1% | 1% | 100% |
| rrIM = 0.75 rrN | −73.9 | <<−100 | <<−100 | −32.4 | −13.1 | <<−100 | <<−100 | −19.3 |
| rrIM = 1.25 rrN | <<−100 | <<−100 | <<−100 | −29.5 | −23.2 | <<−100 | <<−100 | −19.7 |
| rsIM = 0.75 rsN | 2.8 | 53.2 | 45.6 | 3.4 | 6.4 | 54.9 | 44.7 | 2.0 |
| rsIM = 1.25 rsN | −5.5 | 54.4 | 46.0 | −4.7 | −4.2 | 54.4 | 46.8 | −6.0 |
| rrIM = 0.75 rrN; rsIM = 0.75 rsN | 25.2 | 88.6 | 88.0 | 12.3 | 15.6 | 95.1 | 93.8 | −2.8 |
| rrIM = 1.25 rrN; rsIM = 1.25 rsN | 55.1 | 94.2 | 93.0 | 32.0 | 12.2 | 98.3 | 97.7 | 5.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orlowska-Kowalska, T.; Miniach, M.; Adamczyk, M. Compensation of Current Sensor Faults in Vector-Controlled Induction Motor Drive Using Extended Kalman Filters. Electronics 2024, 13, 641. https://doi.org/10.3390/electronics13030641
Orlowska-Kowalska T, Miniach M, Adamczyk M. Compensation of Current Sensor Faults in Vector-Controlled Induction Motor Drive Using Extended Kalman Filters. Electronics. 2024; 13(3):641. https://doi.org/10.3390/electronics13030641
Chicago/Turabian StyleOrlowska-Kowalska, Teresa, Magdalena Miniach, and Michal Adamczyk. 2024. "Compensation of Current Sensor Faults in Vector-Controlled Induction Motor Drive Using Extended Kalman Filters" Electronics 13, no. 3: 641. https://doi.org/10.3390/electronics13030641
APA StyleOrlowska-Kowalska, T., Miniach, M., & Adamczyk, M. (2024). Compensation of Current Sensor Faults in Vector-Controlled Induction Motor Drive Using Extended Kalman Filters. Electronics, 13(3), 641. https://doi.org/10.3390/electronics13030641