

Design, Implementation, and Control of a Wheel-Based Inverted Pendulum



Abstract
1. Introduction
- The need for a simple and cost-efficient hardware design (mechanics and electronics).
- The necessity of developing a representative mathematical model, along with a strategy that allows its efficient parameter estimation.
- The need to develop efficient control and estimation strategies that allow for the desired and reliable performance of inverted pendulums.
- Determination of the pendulum structure and its nonlinear model (Section 2).
- A proposal for a cost-efficient hardware architecture (Section 2.2).
- Application of the small-angle approach for the determination of the linear state-space model of an inverted pendulum (Section 2).
- Modelling and data-based identification of an inverted pendulum (Section 3).
- Validation of the identified model (Section 3).
- Matlab/Simulink-based preliminary validation of the model (Section 3).
- Design and analysis of dedicated cascade PID and Kalman-filter-based LQR controllers (Section 4).
- Experimental validation of the proposed design and control strategies (Section 5).
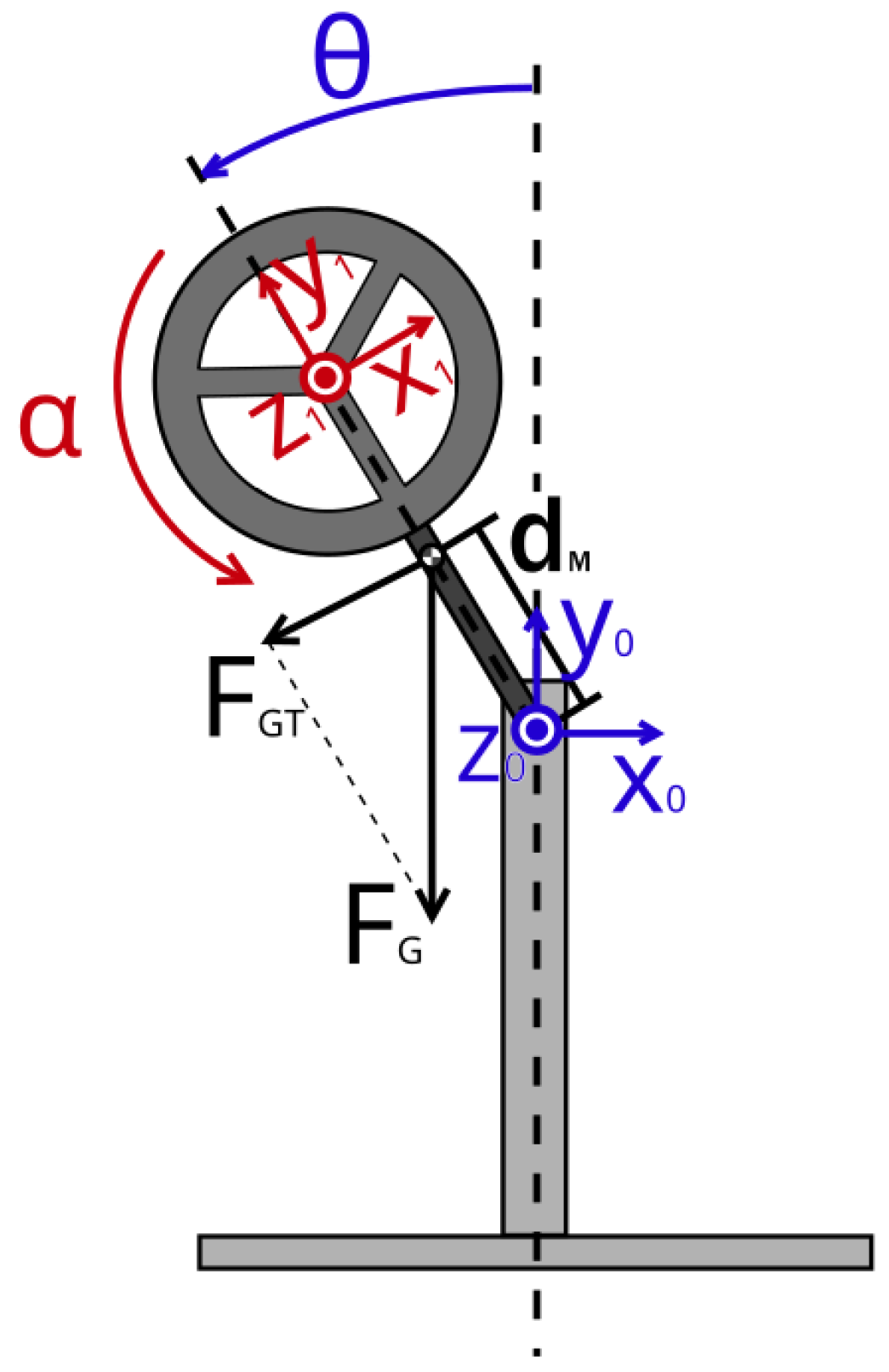
2. Inverted Pendulum Model and Design
2.1. Mathematical Model
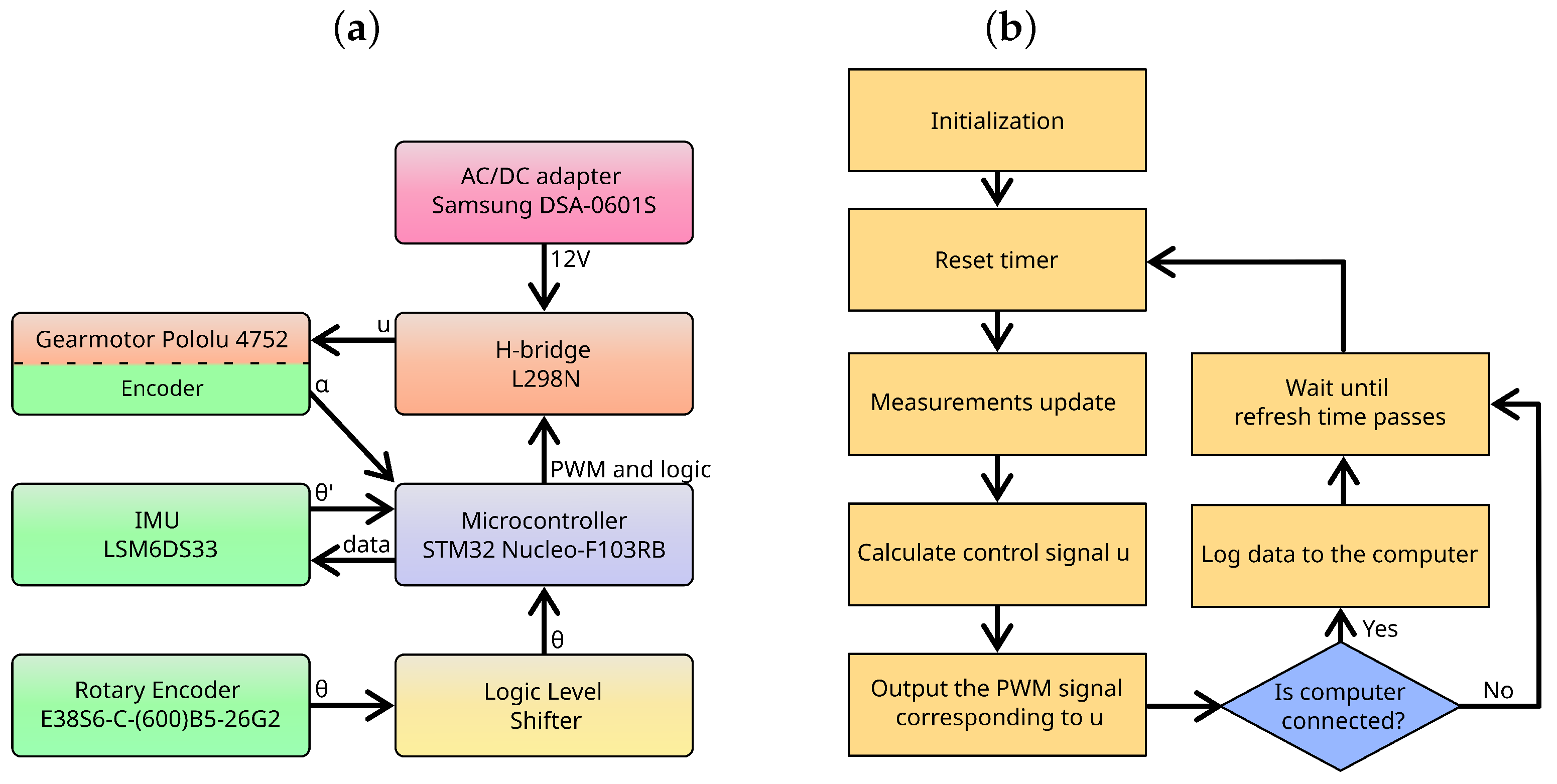
2.2. Physical System Design and Implementation
- A rotary encoder (E38S6-C-(600)B5-26G2) to measure .
- An encoder inside the gear motor (Pololu 4752) to measure .
- An inertial measurement unit (IMU), LSM6DS33, to record .
3. Parameter Estimation
3.1. The Reaction Wheel’s Moment of Inertia
3.2. The Pendulum’s Moment of Inertia
3.3. Friction Coefficient
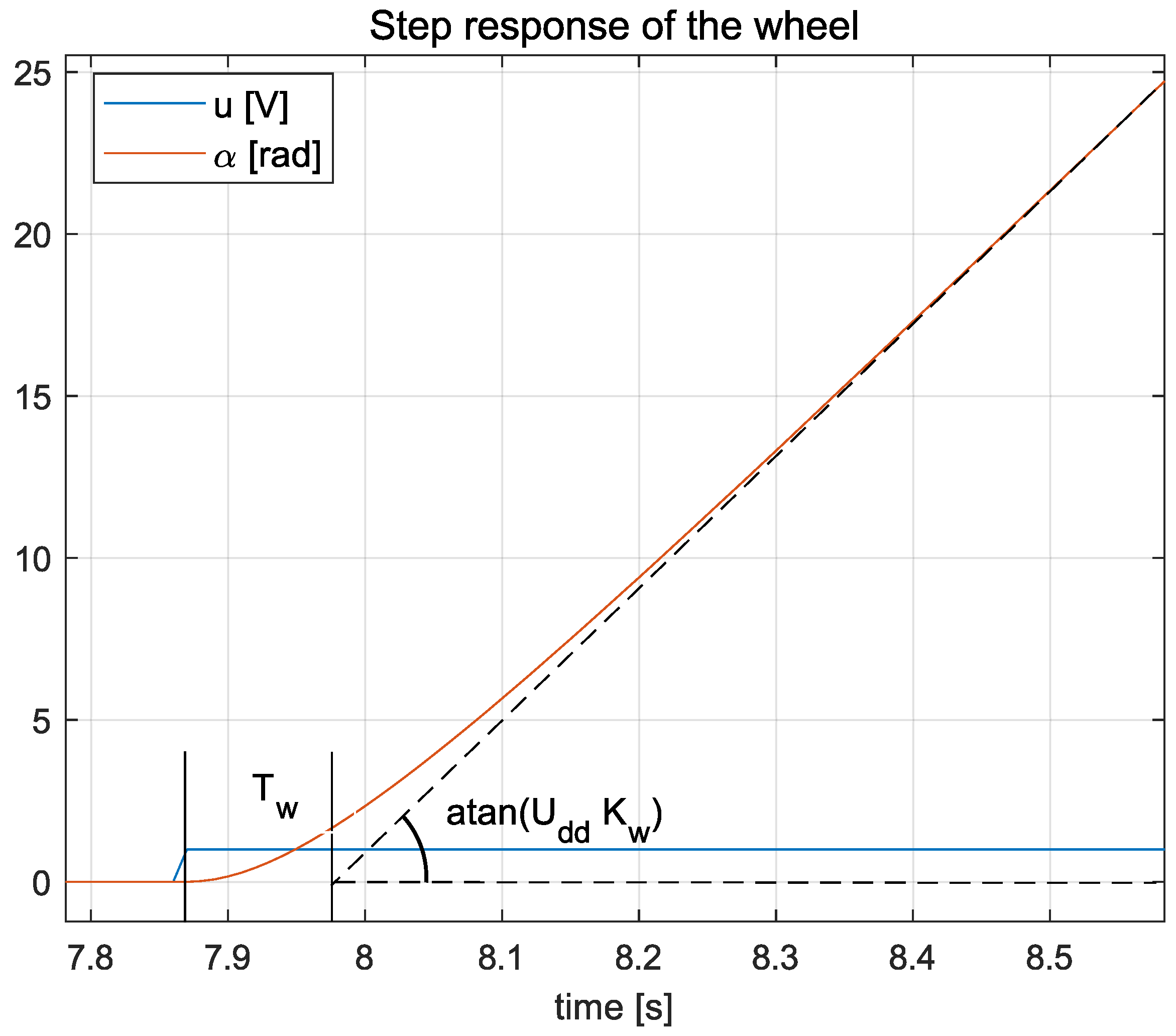
3.4. The Motor’s Parameters
3.5. Summary of the Model’s Parameters
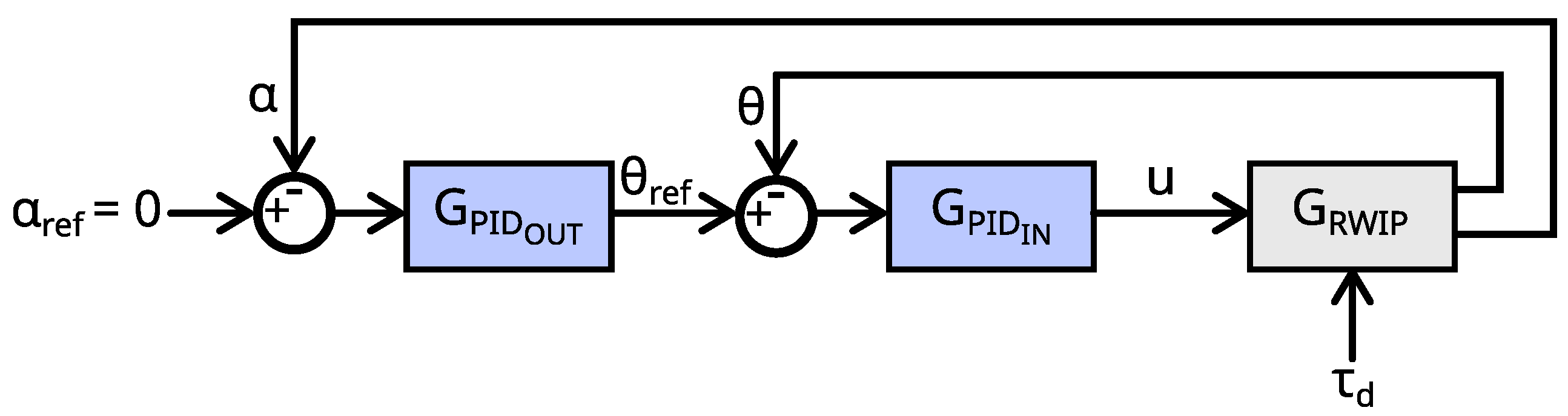
4. Control of Inverted Pendulum
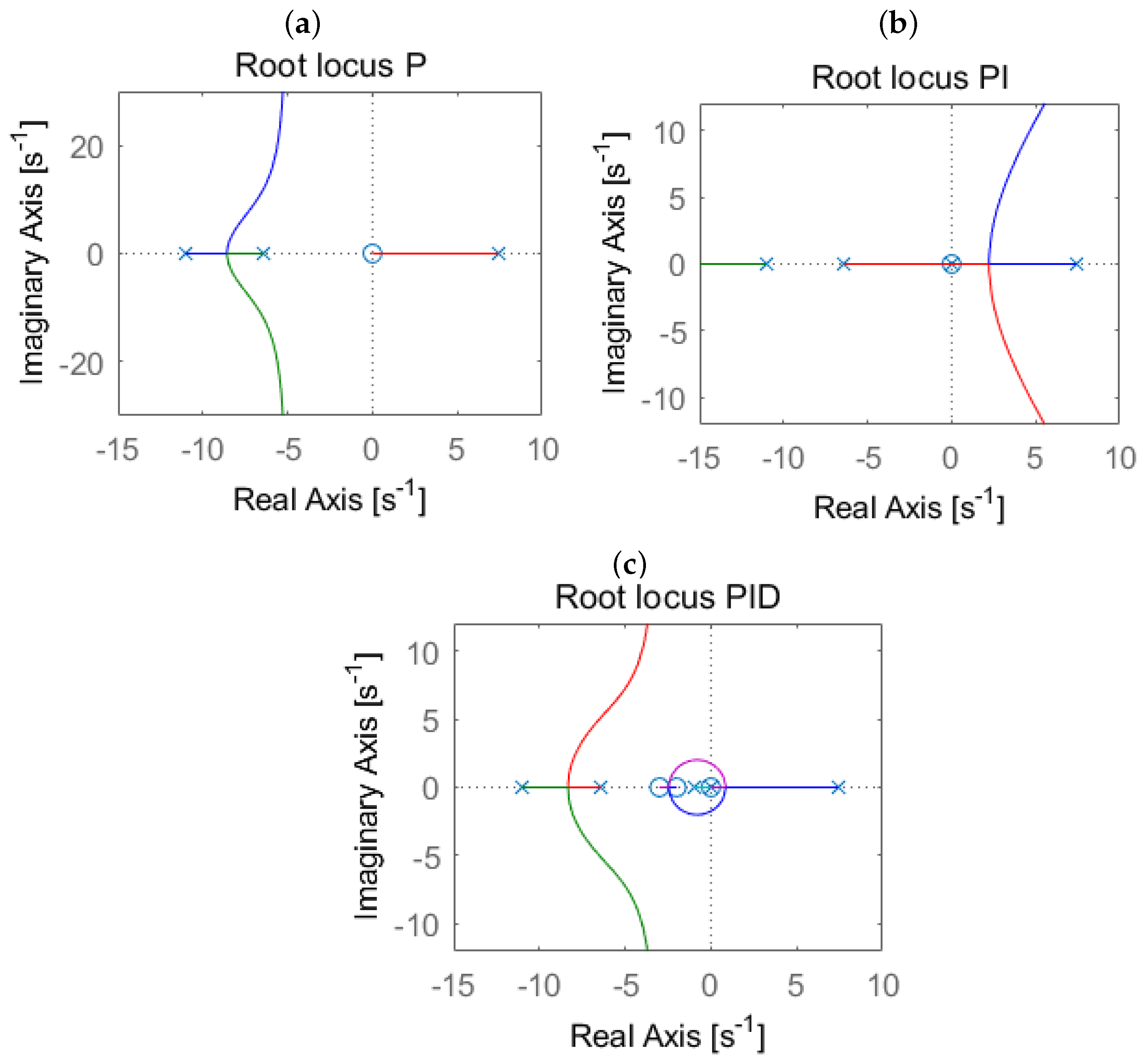
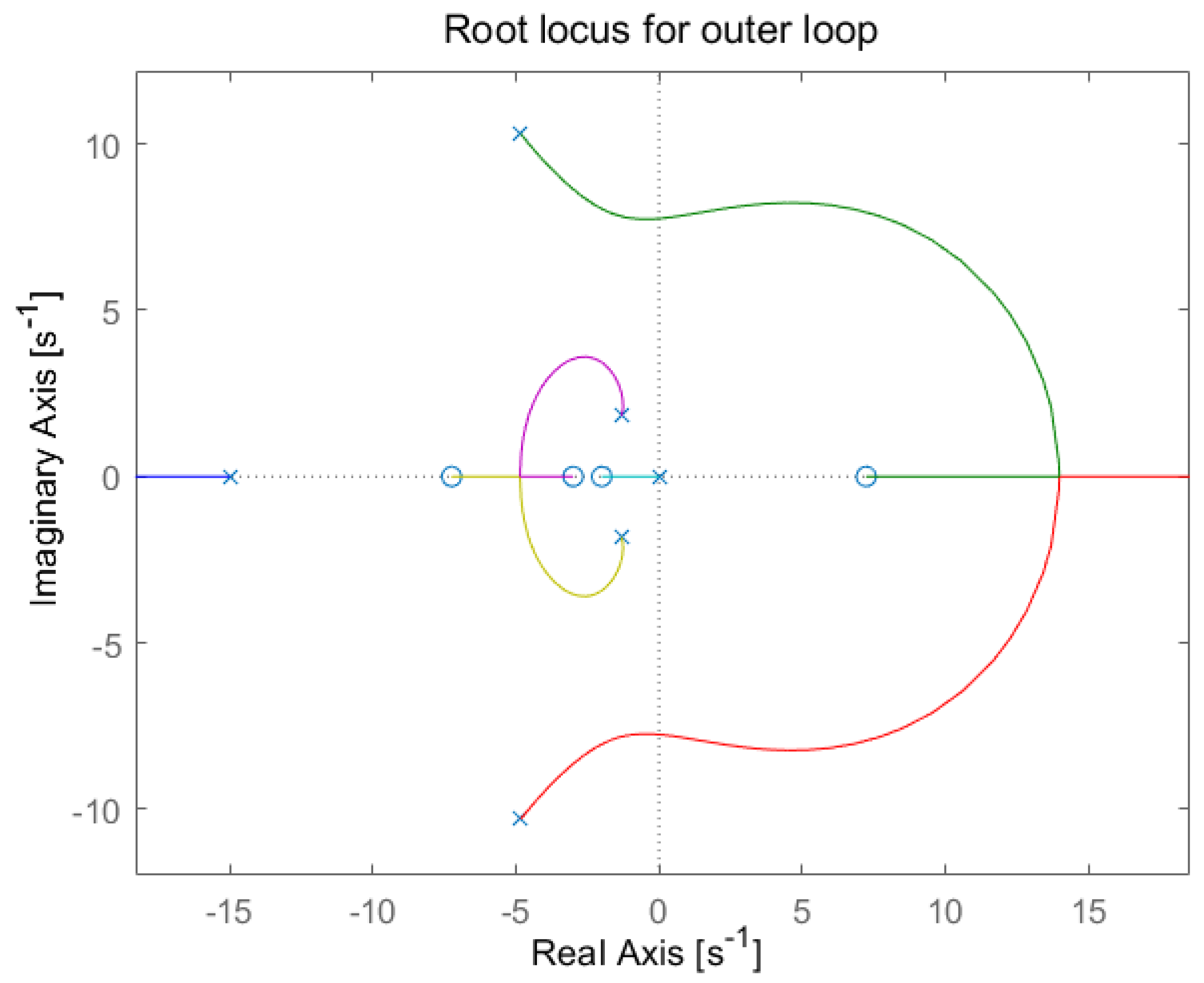
4.1. Cascade PID Control
4.2. Linear–Quadratic–Gaussian Controller
4.2.1. Feedback Gain
4.2.2. State Observer
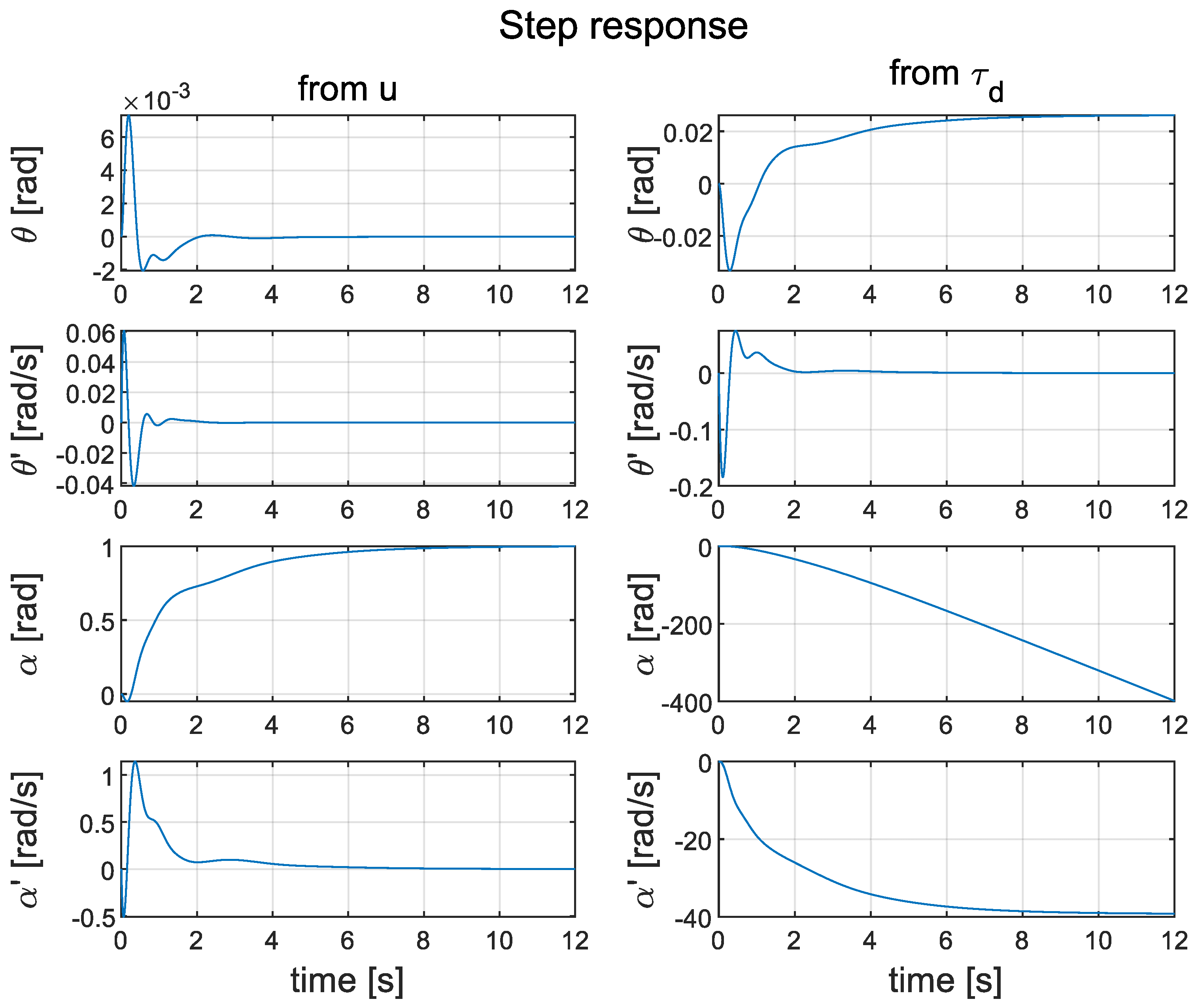
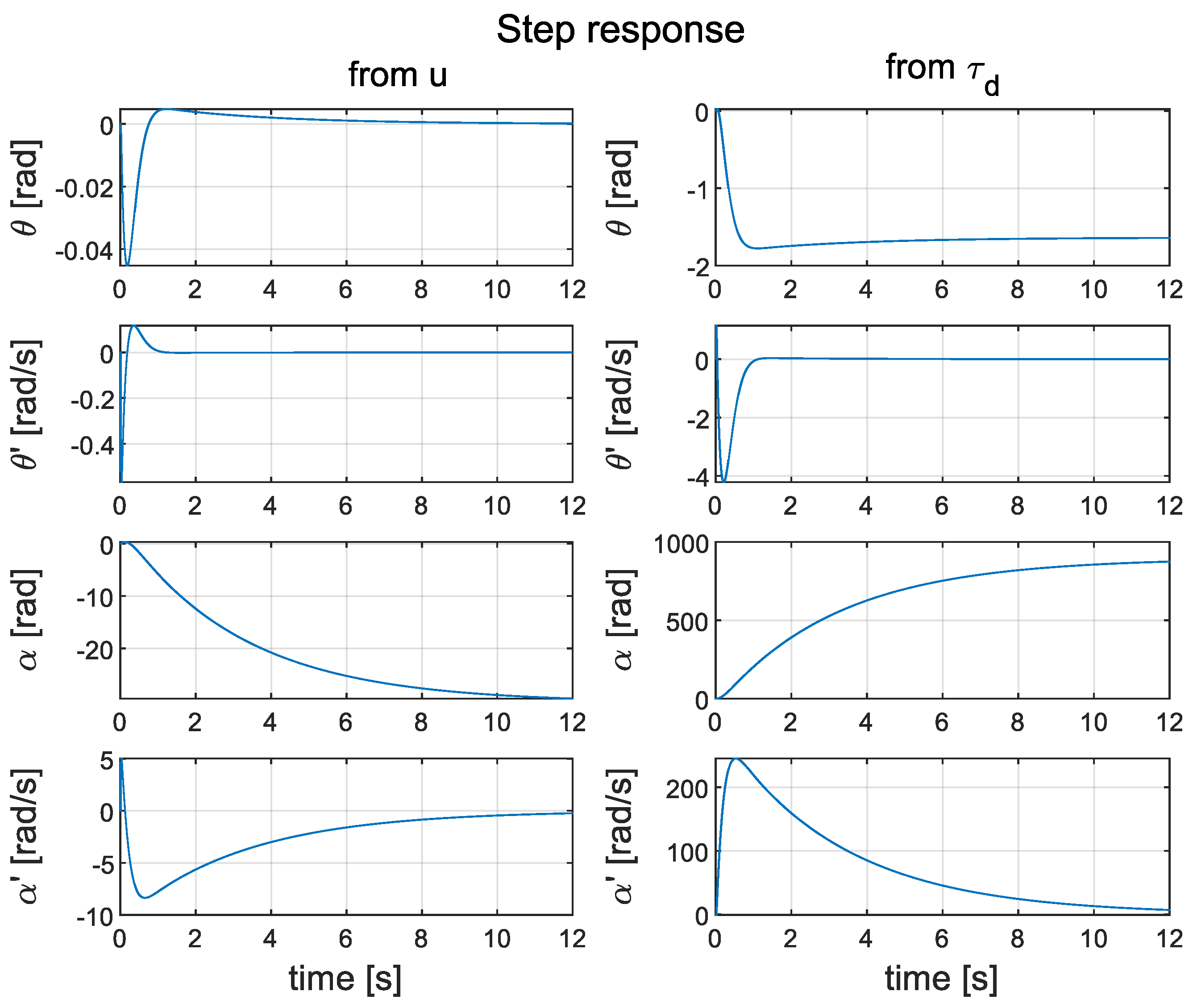
4.3. Comparative Evaluation
- The maximum absolute value of the controlled signal .
- The settling time , calculated as the time from the moment the system is excited until the signal error reaches and remains constantly within the tolerance zone , with being the maximum error.
- The percentage overshoot —calculated for signals with a zero steady-state value as the ratio of two adjacent peak amplitudes: .
- The percentage overshoot —calculated for signals with a non-zero steady-state value: .
5. Experimental Results
5.1. Impulse Disturbance Torque
5.2. Constant Disturbance Torque
6. Conclusions
- Investigating the selection of the Kalman filter covariance matrices in order to better deal with both changing noise and disturbances.
- Relaxing the small-angle assumption and deriving a linear parameter-varying (LPV) model of the pendulum.
- Designing LPV controllers and state observers.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aranovskiy, S.; Biryuk, A.; Nikulchev, E.V.; Ryadchikov, I.; Sokolov, D. Observer design for an inverted pendulum with biased position sensors. J. Comput. Syst. Sci. Int. 2019, 58, 297–304. [Google Scholar] [CrossRef]
- Xu, Q.; Stepan, G.; Wang, Z. Balancing a wheeled inverted pendulum with a single accelerometer in the presence of time delay. J. Vib. Control 2017, 23, 604–614. [Google Scholar] [CrossRef]
- Hamza, M.F.; Yap, H.J.; Choudhury, I.A.; Isa, A.I.; Zimit, A.Y.; Kumbasar, T. Current development on using Rotary Inverted Pendulum as a benchmark for testing linear and nonlinear control algorithms. Mech. Syst. Signal Process. 2019, 116, 347–369. [Google Scholar] [CrossRef]
- Mehedi, I.M.; Ansari, U.; Al-Saggaf, U.M. Three degrees of freedom rotary double inverted pendulum stabilization by using robust generalized dynamic inversion control: Design and experiments. J. Vib. Control. 2020, 26, 2174–2184. [Google Scholar] [CrossRef]
- Baimukashev, D.; Sandibay, N.; Rakhim, B.; Varol, H.A.; Rubagotti, M. Deep learning-based approximate optimal control of a reaction-wheel-actuated spherical inverted pendulum. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 1322–1328. [Google Scholar]
- Du, D.; Zhang, C.; Song, Y.; Zhou, H.; Li, X.; Fei, M.; Li, W. Real-time Hinf control of networked inverted pendulum visual servo systems. IEEE Trans. Cybern. 2019, 50, 5113–5126. [Google Scholar] [CrossRef] [PubMed]
- Bezci, Y.E.; Aghaei, V.T.; Akbulut, B.E.; Tan, D.; Allahviranloo, T.; Fernandez-Gamiz, U.; Noeiaghdam, S. Classical and intelligent methods in model extraction and stabilization of a dual-axis reaction wheel pendulum: A comparative study. Results Eng. 2022, 16, 100685. [Google Scholar] [CrossRef]
- Nguyen, B.H.; Cu, M.P.; Nguyen, M.T.; Tran, M.S.; Tran, H.C. Lqr and fuzzy control for reaction wheel inverted pendulum model. Robot. Manag. 2019, 24. [Google Scholar]
- Trentin, J.F.S.; Da Silva, S.; Ribeiro, J.M.D.S.; Schaub, H. Inverted pendulum nonlinear controllers using two reaction wheels: Design and implementation. IEEE Access 2020, 8, 74922–74932. [Google Scholar] [CrossRef]
- Belascuen, G.; Aguilar, N. Design, modeling and control of a reaction wheel balanced inverted pendulum. In Proceedings of the 2018 IEEE Biennial Congress of Argentina (ARGENCON), San Miguel de Tucuman, Argentina, 6–8 June 2018; pp. 1–9. [Google Scholar]
- Önen, Ü.; Çakan, A. Multibody modeling and balance control of a reaction wheel inverted pendulum using lqr controller. Int. J. Robot. Control Syst. 2021, 1, 84–89. [Google Scholar] [CrossRef]
- Chinelato, C.I.G.; Neves, G.P.D.; Angélico, B.A. Safe control of a reaction wheel pendulum using control barrier function. IEEE Access 2020, 8, 160315–160324. [Google Scholar] [CrossRef]
- Ding, H.; Zhou, Z.; Dang, H.; Zhao, Z. Control Wheel Rotation Inverted Pendulum Control Based on Unscented Kalman Filter. In Proceedings of the 2019 IEEE 2nd International Conference on Information Communication and Signal Processing (ICICSP), Weihai, China, 28–30 September 2019; pp. 81–86. [Google Scholar]
- Türkmen, A.; Korkut, M.Y.; Erdem, M.; Gönül, Ö.; Sezer, V. Design, implementation and control of dual axis self balancing inverted pendulum using reaction wheels. In Proceedings of the 2017 10th International Conference on Electrical and Electronics Engineering (ELECO), Chengdu, China, 10–17 August 2017; pp. 717–721. [Google Scholar]
- Hofer, M.; Muehlebach, M.; D’Andrea, R. The One-Wheel Cubli: A 3D inverted pendulum that can balance with a single reaction wheel. Mechatronics 2023, 91, 102965. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.; Han, S. Balancing the Cubli Frame with LQR-controlled Reaction Wheel. J. Sens. Sci. Technol. 2018, 27, 165–169. [Google Scholar]
- Ryadchikov, I.; Sokolov, D.; Biryuk, A.; Sechenev, S.; Svidlov, A.; Volkodav, P.; Mamelin, Y.; Popko, K.; Nikulchev, E. Stabilization of a hopper with three reaction wheels. In Proceedings of the ISR 2018, 50th International Symposium on Robotics, VDE, Munich, Germany, 20–21 June 2018; pp. 1–4. [Google Scholar]
- Sontag, E.D. Mathematical Control Theory: Deterministic Finite Dimensional Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 6. [Google Scholar]
- Georgiou, T.T.; Lindquist, A. The Separation Principle in Stochastic Control, Redux. IEEE Trans. Autom. Control 2013, 58, 2481–2494. [Google Scholar] [CrossRef]
- Gillijns, S.; De Moor, B. Unbiased minimum-variance input and state estimation for linear discrete-time systems. Automatica 2007, 43, 111–116. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | ||
| kg | ||
| kg | ||
| J | ||
| g |
| Cascade PID | ||||||
|---|---|---|---|---|---|---|
| Input | Disturbance | |||||
| Variable | ||||||
| – | ||||||
| [s] | – | 7 | ||||
| 28 | – | – | – | – | – | |
| – | 0 | – | 0 | – | 0 | |
| LQR | ||||||
| Input u | Disturbance | |||||
| Variable | ||||||
| [s] | ||||||
| 22 | – | – | – | – | – | |
| – | 0 | – | 0 | – | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaborniak, D.; Patan, K.; Witczak, M. Design, Implementation, and Control of a Wheel-Based Inverted Pendulum. Electronics 2024, 13, 514. https://doi.org/10.3390/electronics13030514
Zaborniak D, Patan K, Witczak M. Design, Implementation, and Control of a Wheel-Based Inverted Pendulum. Electronics. 2024; 13(3):514. https://doi.org/10.3390/electronics13030514
Chicago/Turabian StyleZaborniak, Dominik, Krzysztof Patan, and Marcin Witczak. 2024. "Design, Implementation, and Control of a Wheel-Based Inverted Pendulum" Electronics 13, no. 3: 514. https://doi.org/10.3390/electronics13030514
APA StyleZaborniak, D., Patan, K., & Witczak, M. (2024). Design, Implementation, and Control of a Wheel-Based Inverted Pendulum. Electronics, 13(3), 514. https://doi.org/10.3390/electronics13030514