
FI-NPI: Exploring Optimal Control in Parallel Platform Systems

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Methods
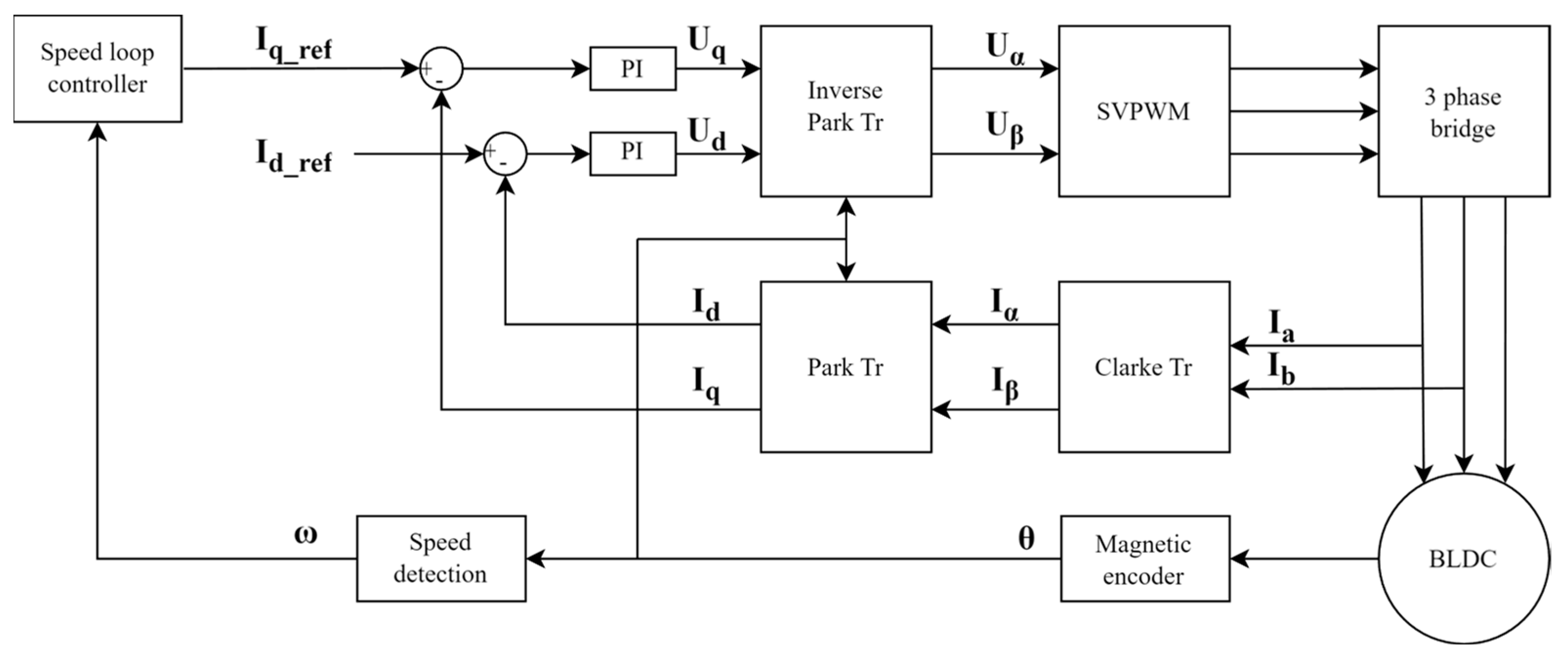
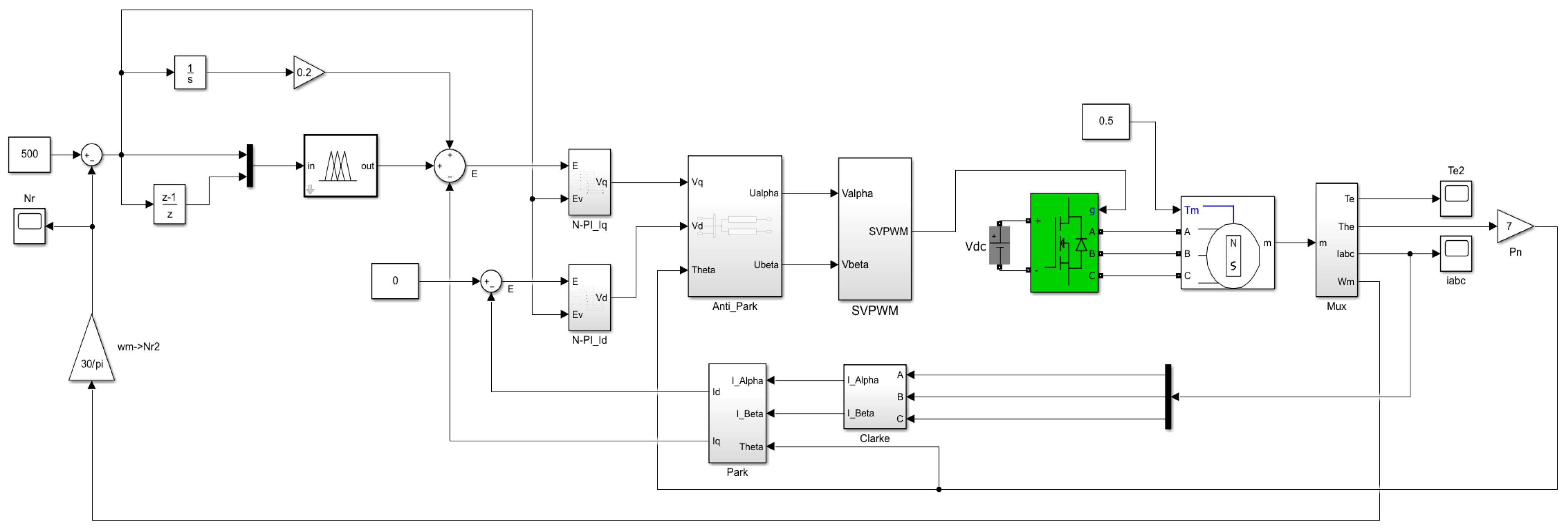
2.1. Working Principle of FOC
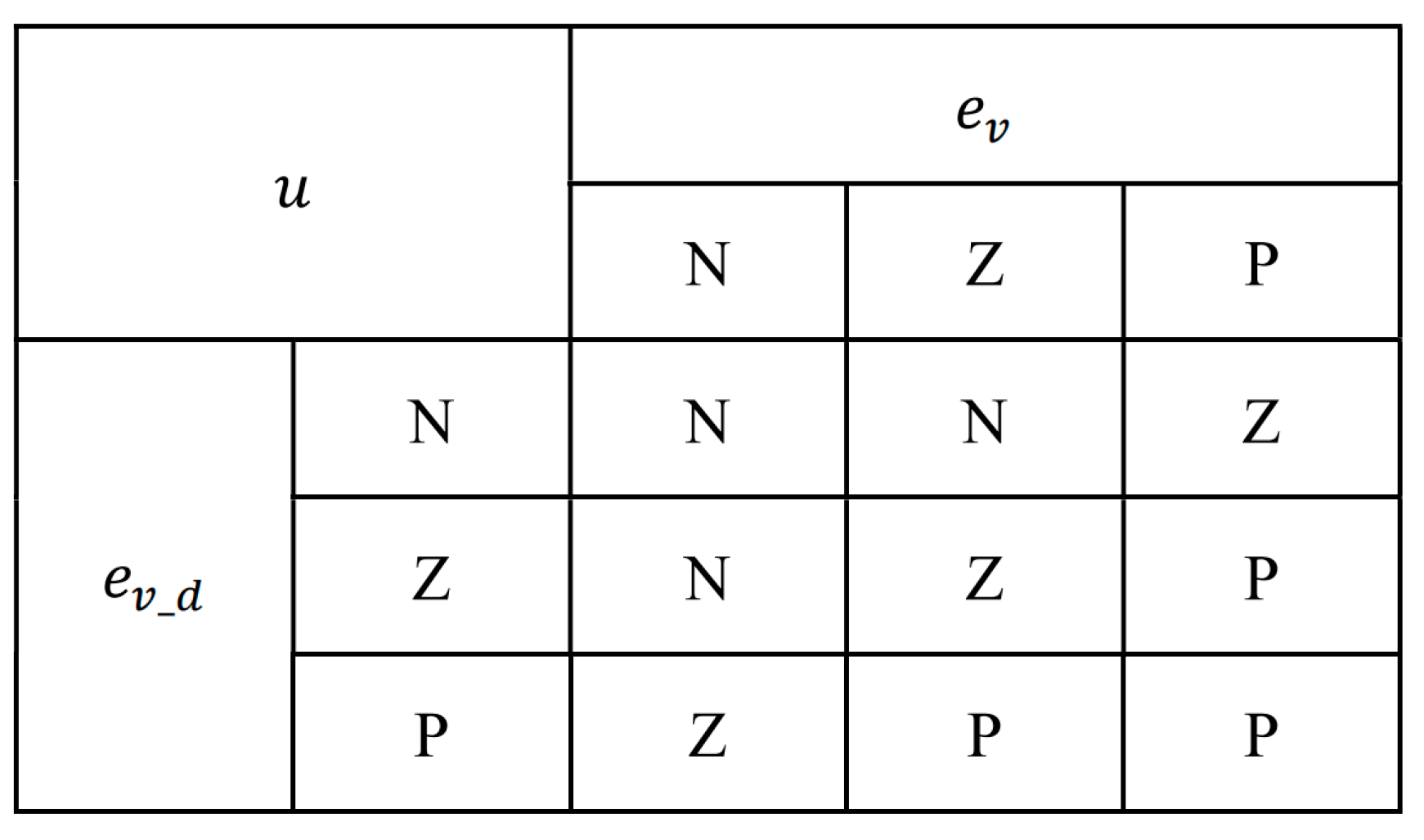
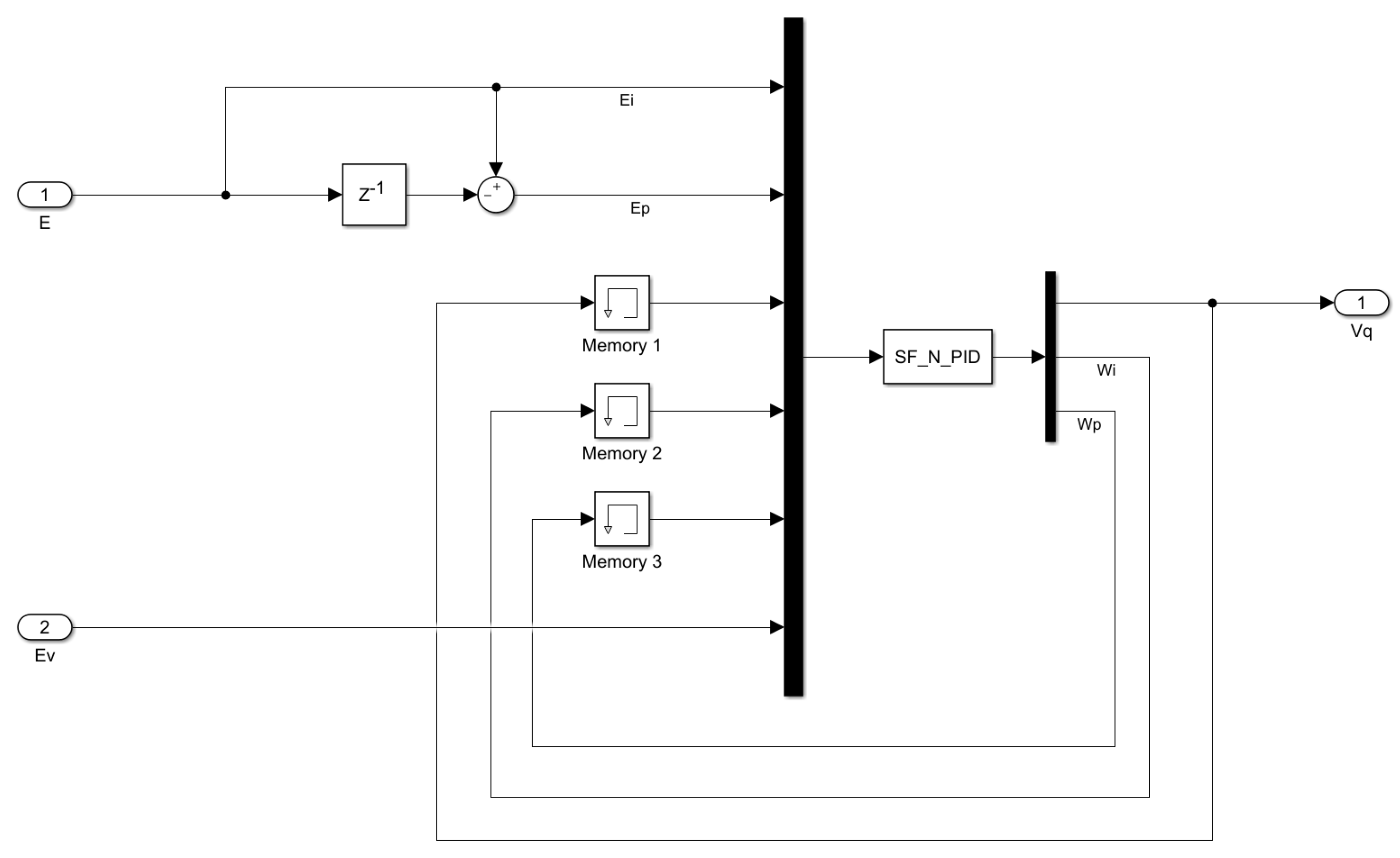
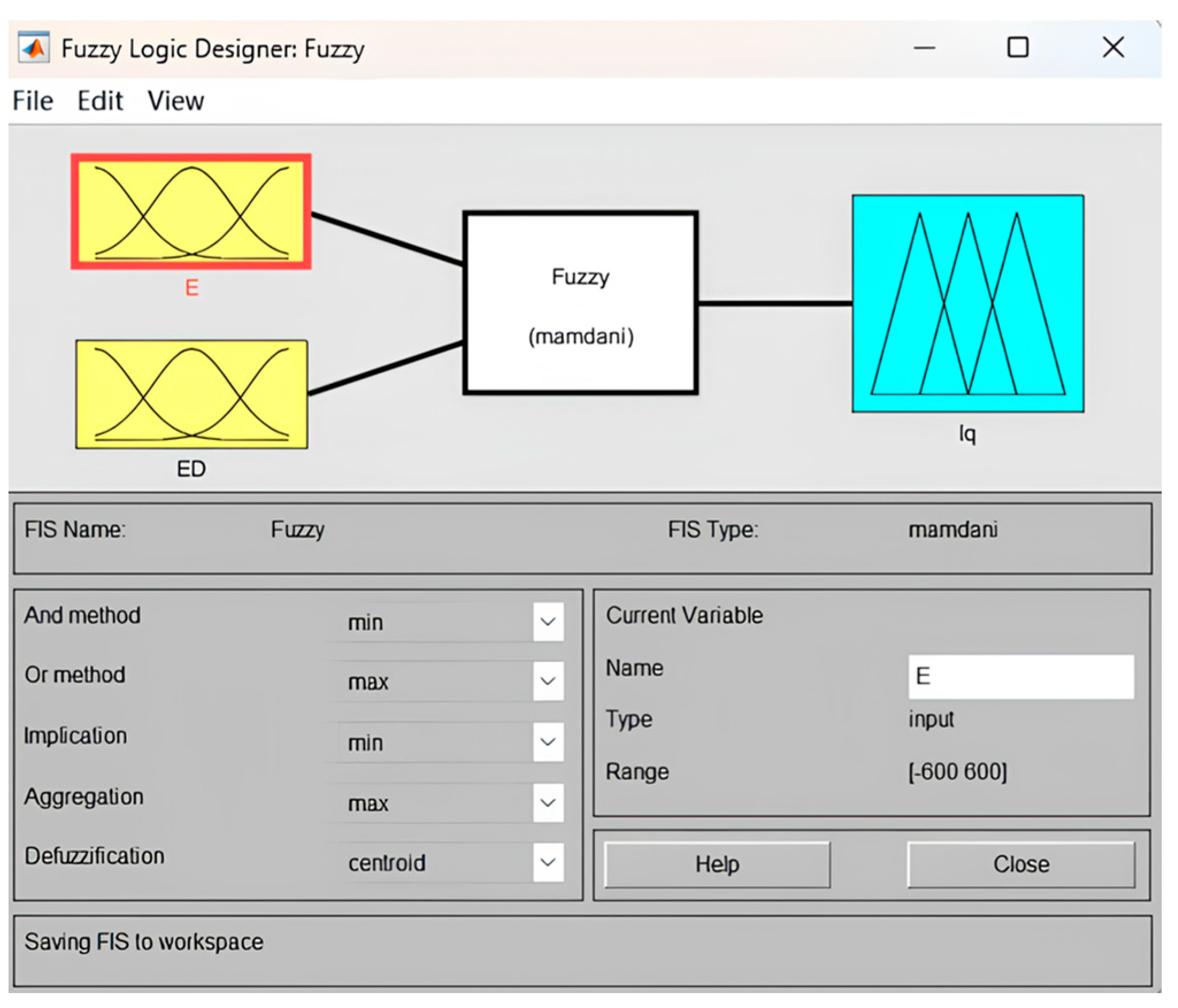
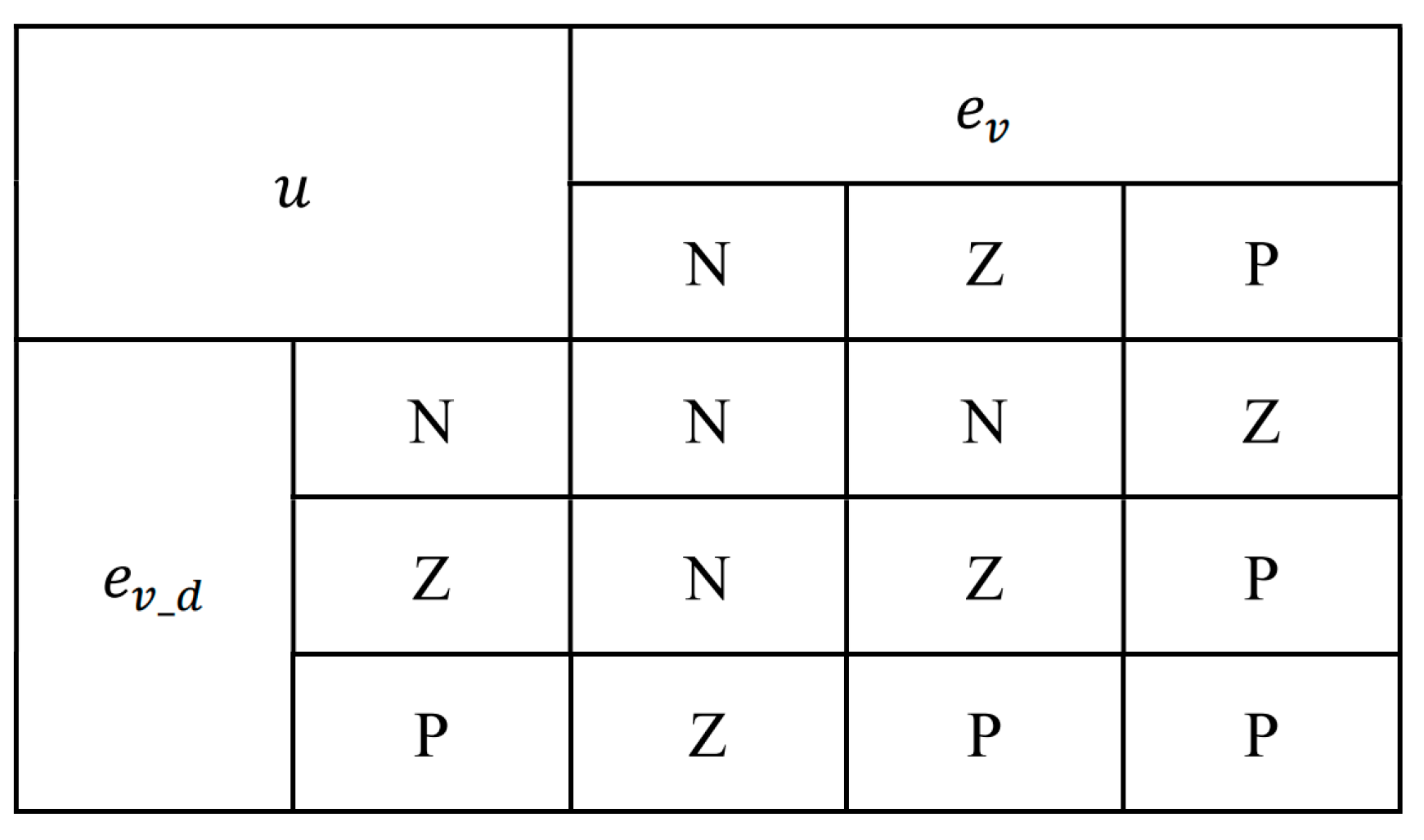
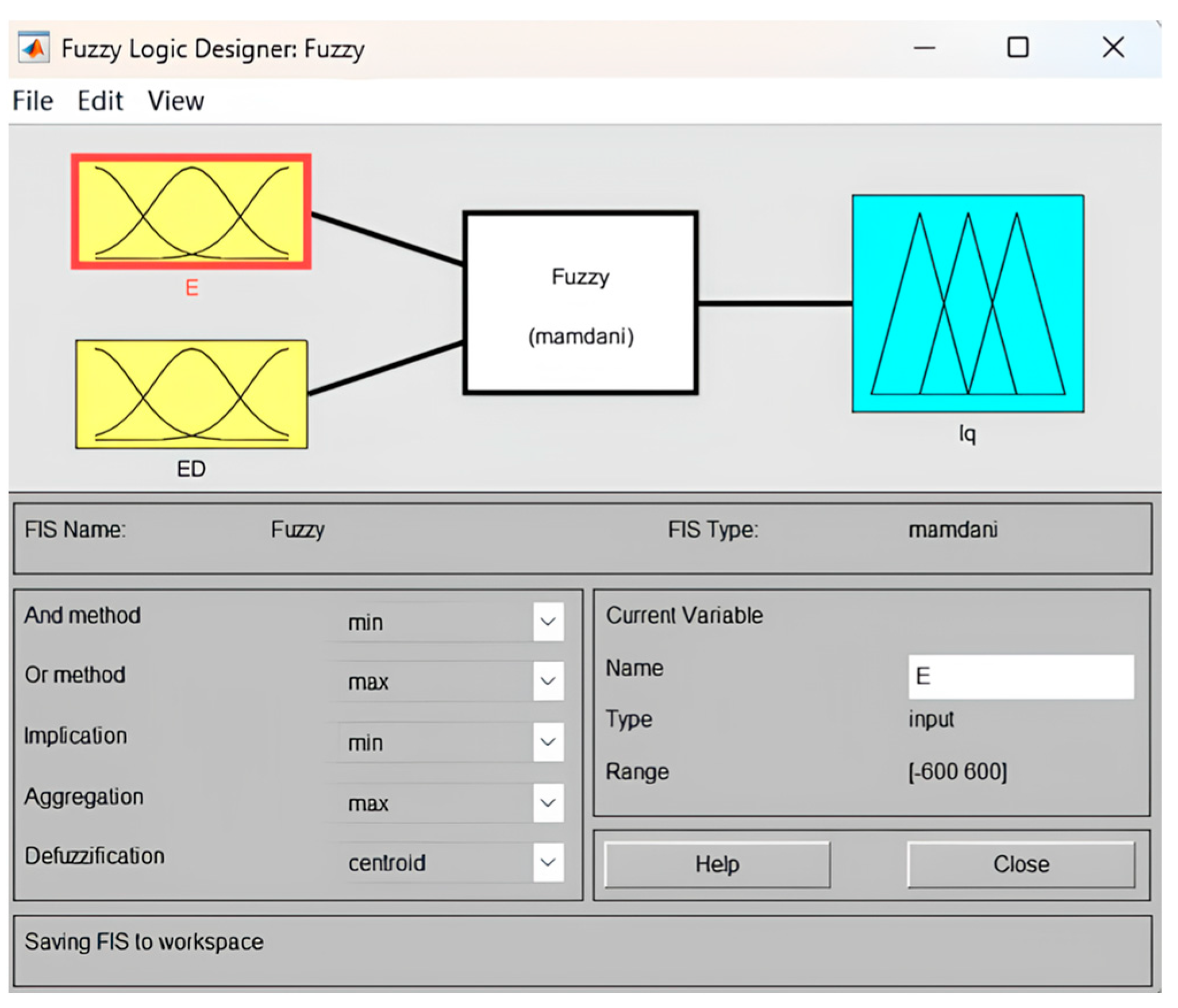
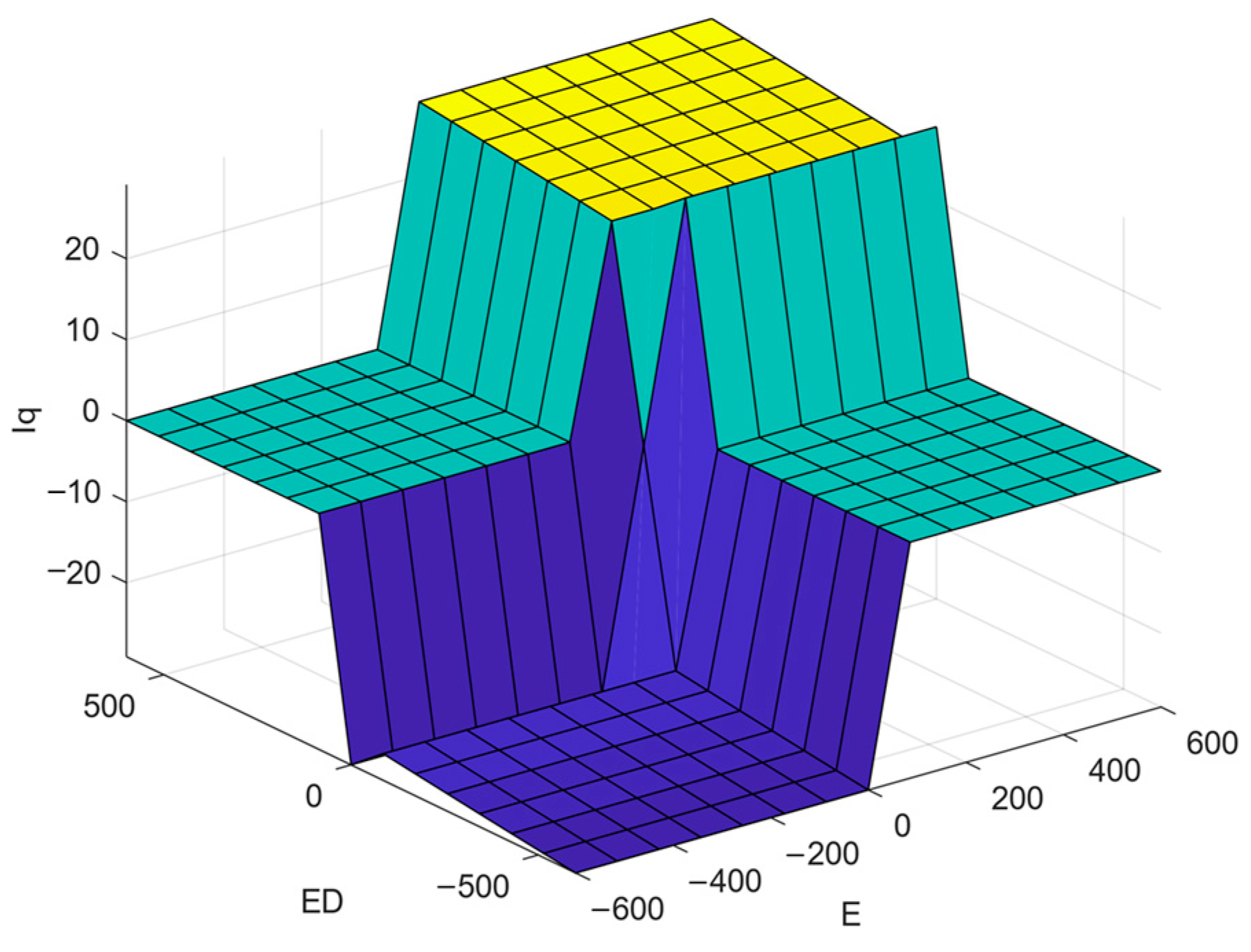
2.2. Design of Fuzzy Integral-Neuron PI Double-Loop Controller
3. Experiments and Results
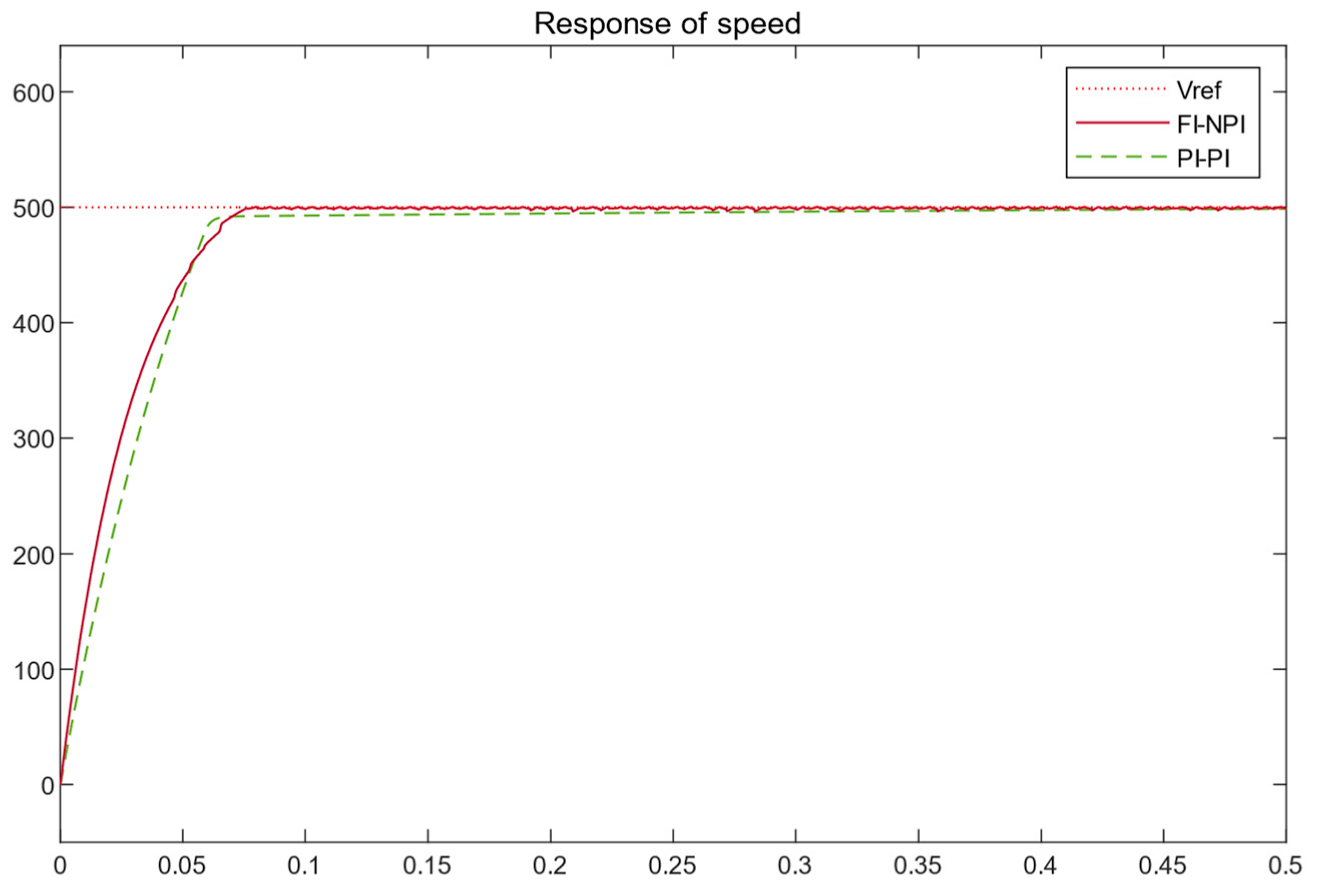
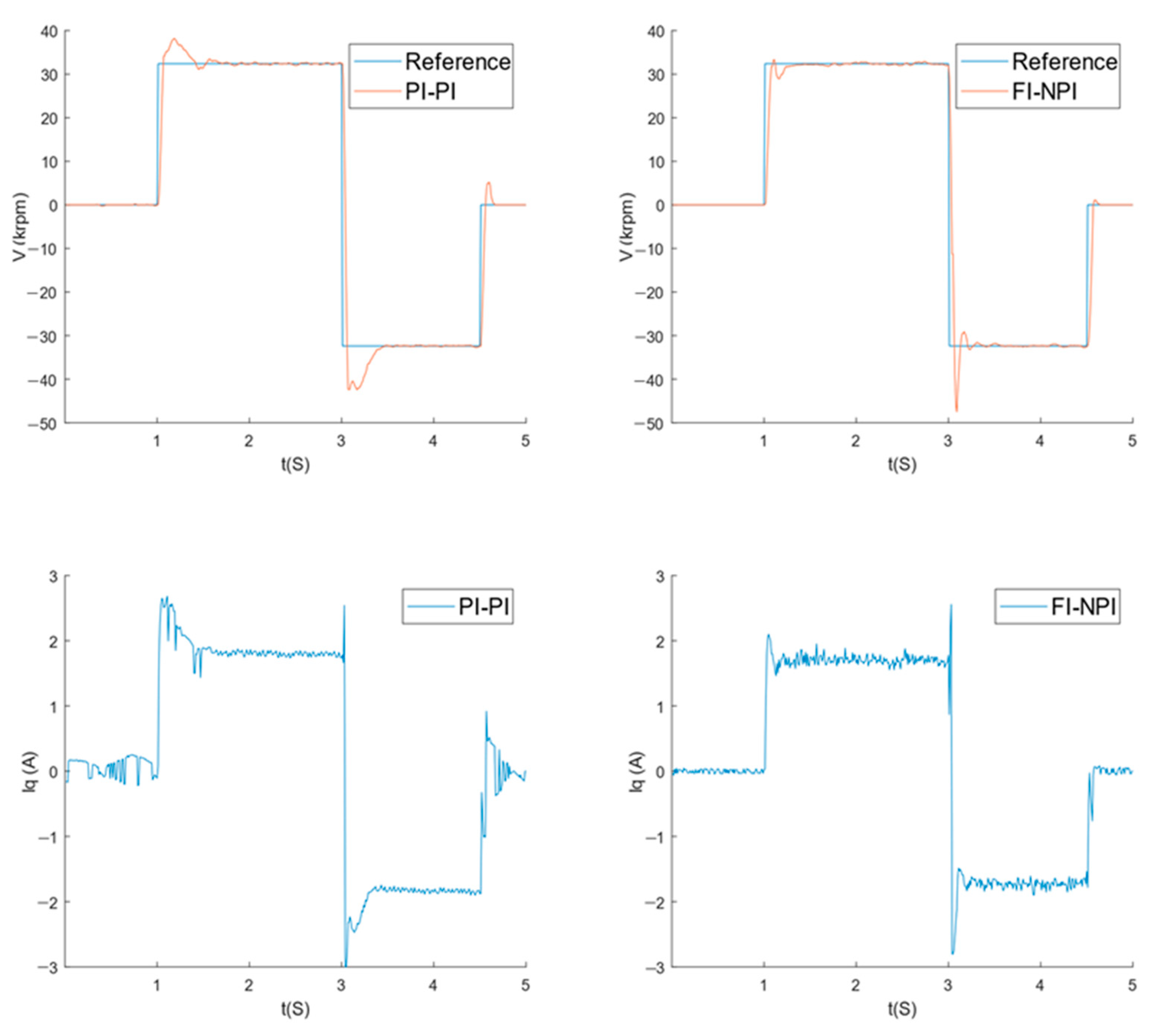
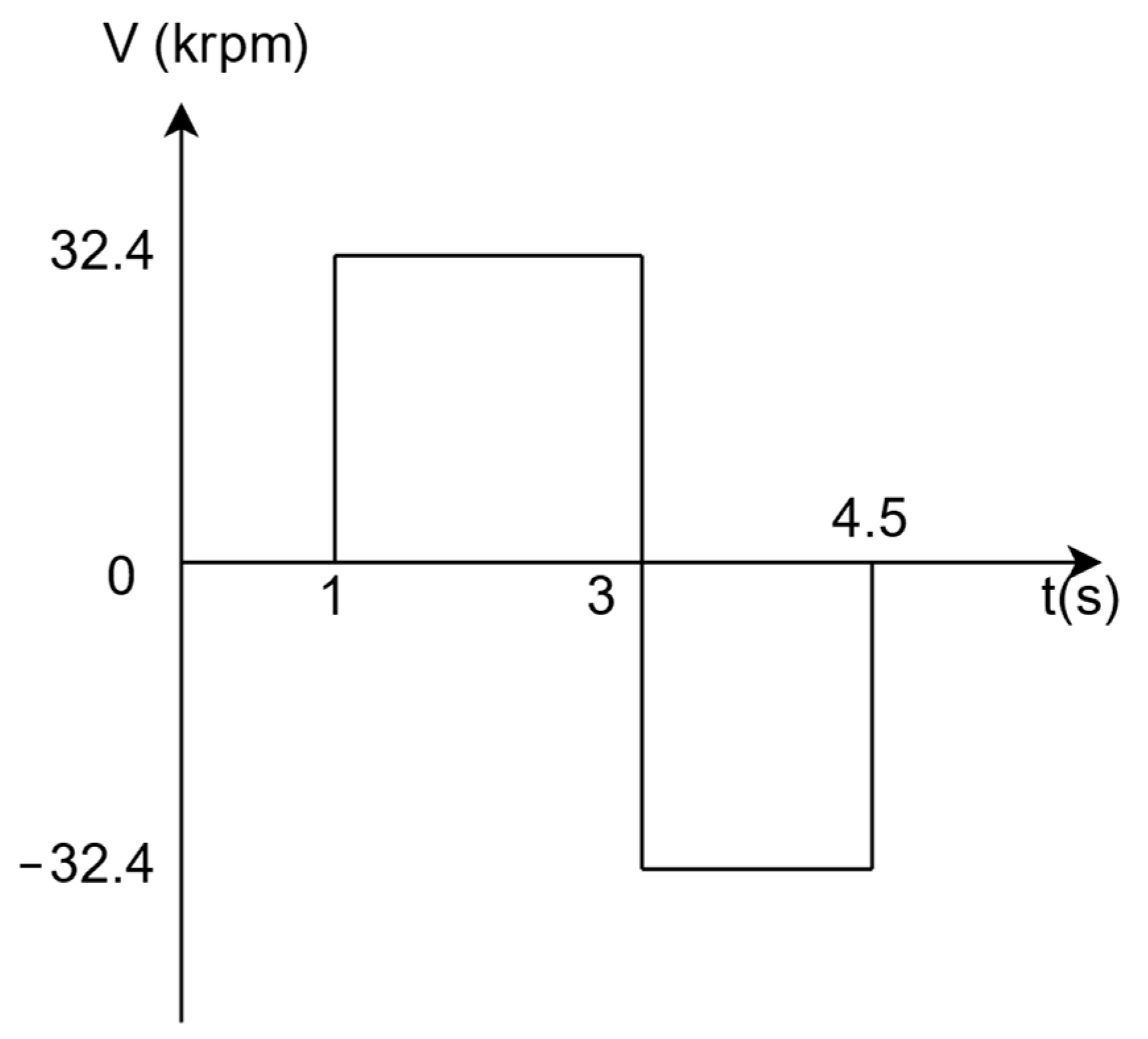
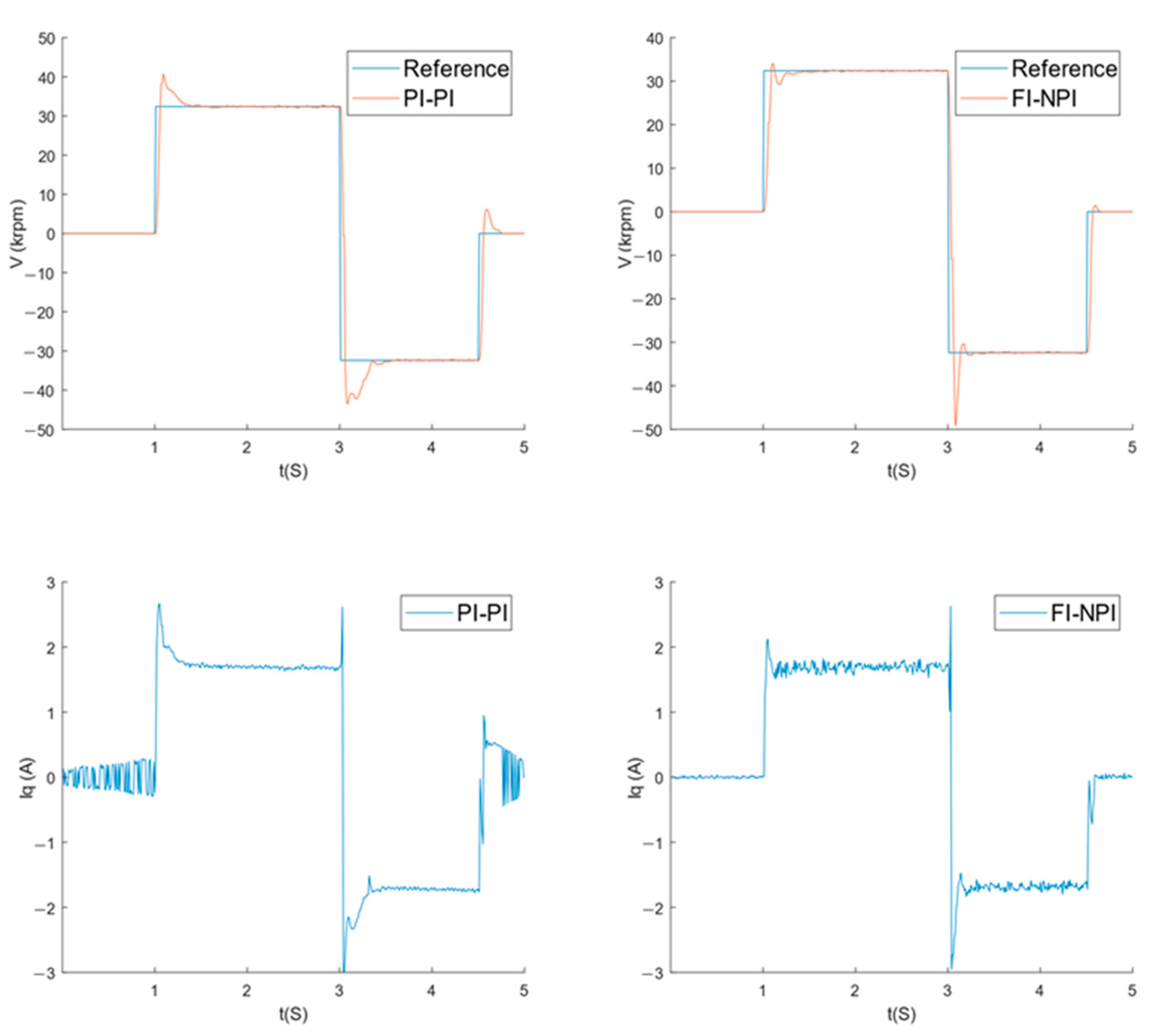
3.1. Simulation Experiment
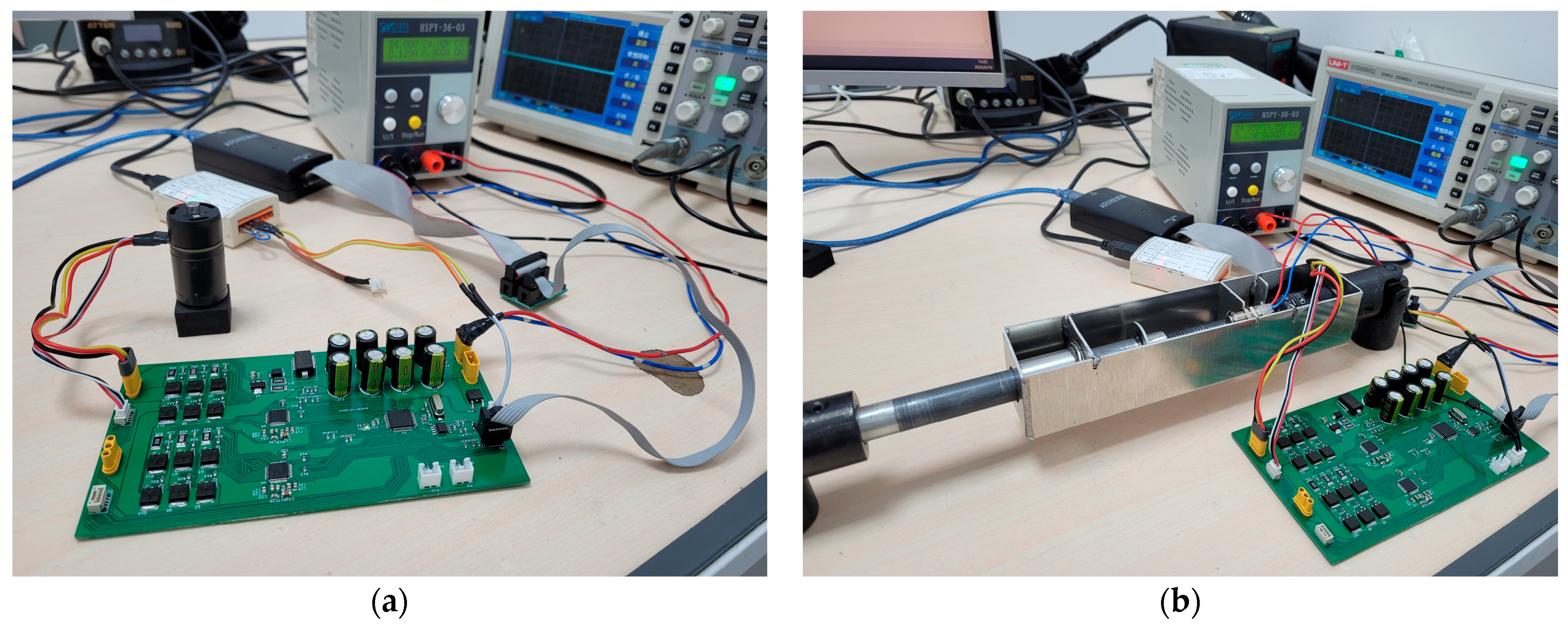
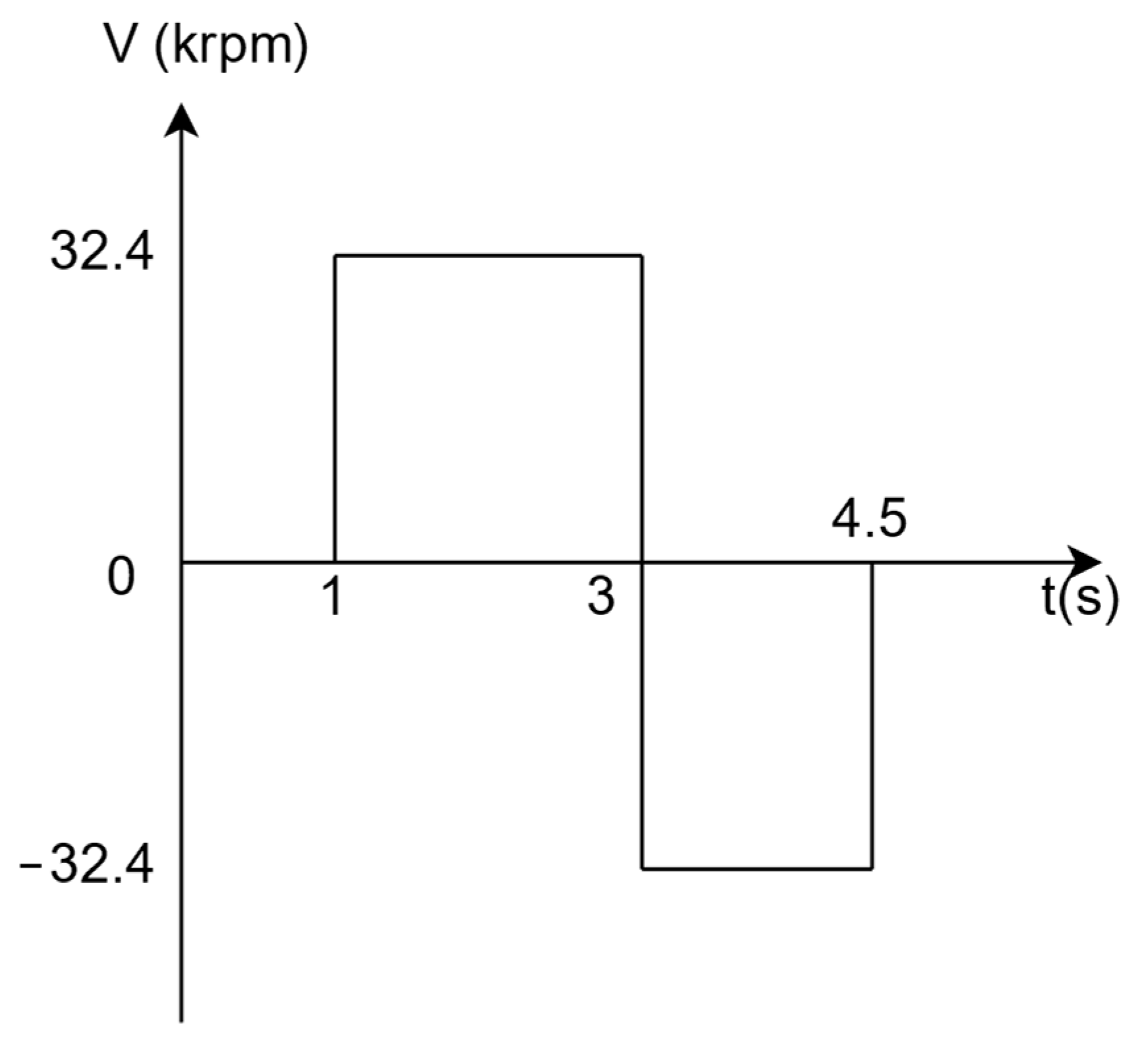
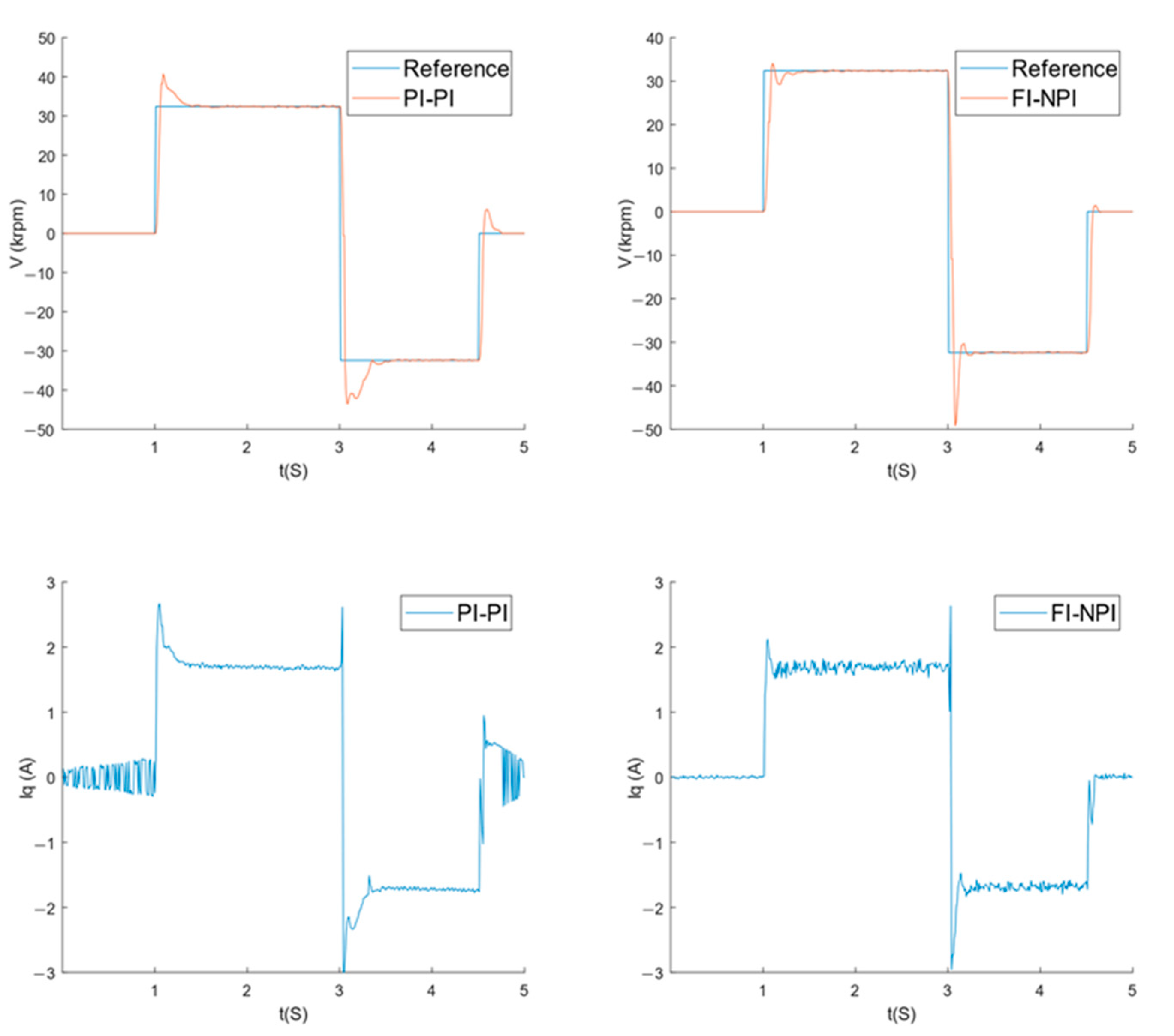
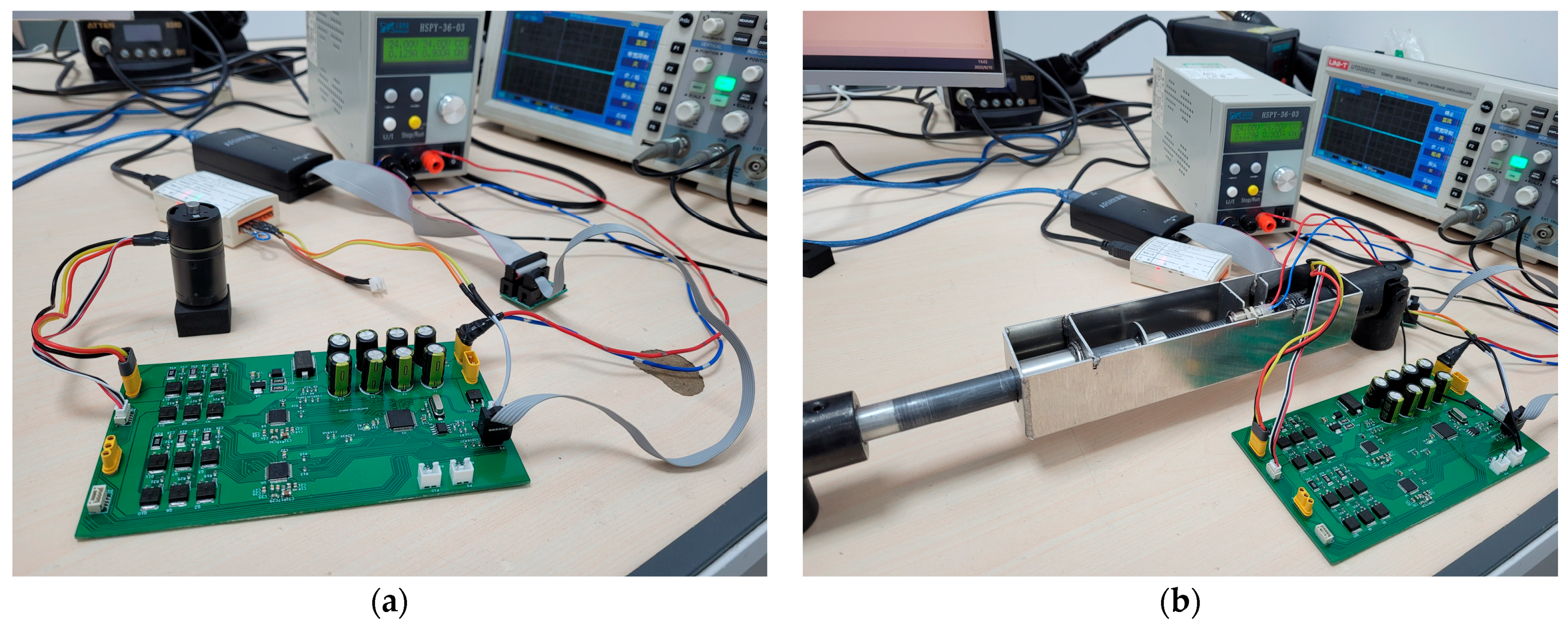
3.2. Practical Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yuan, X.; Tang, Y.; Wang, W.; Zhang, L. Parametric Vibration Analysis of a Six-Degree-of-Freedom Electro-Hydraulic Stewart Platform. Shock Vib. 2021, 2021, 9994786. [Google Scholar] [CrossRef]
- Li, J.; Nie, Z.; Chen, Y.; Ge, D.; Li, M. Development of Boom Posture Adjustment and Control System for Wide Spray Boom. Agriculture 2023, 13, 2162. [Google Scholar] [CrossRef]
- Gu, Q.; Tian, J.; Yang, B.; Liu, M.; Gu, B.; Yin, Z.; Yin, L.; Zheng, W. A novel architecture of a six degrees of freedom parallel platform. Electronics 2023, 12, 1774. [Google Scholar] [CrossRef]
- Zhang, F.; Mei, J.; Zhao, Y. Dimensional synthesis of six-degrees-of-freedom high-speed parallel robot using comprehensive evaluation index. J. Mech. Sci. Technol. 2020, 34, 1325–1338. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, X.; Sun, X.; Zhang, J.; Chen, X. Soft Sensor Simulation of Minimum Energy Consumption of Joint Manipulator Drive System Based on Improved BP Neural Network. In Proceedings of the 4th International Conference on Electrical, Automation and Mechanical Engineering (EAME), Electr Network, Turin, Italy, 21–22 June 2020. [Google Scholar]
- Xu, H.; Zhou, H.; Tan, S.; Duan, J.-A.; Hou, F. A six-degree-of-freedom compliant parallel platform for optoelectronic packaging. IEEE Trans. Ind. Electron. 2020, 68, 11178–11187. [Google Scholar] [CrossRef]
- Wang, W.; Wang, N.; Wu, X. Kinematics and dynamics analysis of a six-degree of freedom parallel manipulator. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221132077. [Google Scholar] [CrossRef]
- Kausar, Z.; Shah, M.F.; Masood, Z.; Rehman, H.Z.U.; Khaydarov, S.; Saeed, M.T.; Razmkhah, O.; Yaqoob, H. Energy efficient parallel configuration based six degree of freedom machining bed. Energies 2021, 14, 2642. [Google Scholar] [CrossRef]
- Sakama, S.; Tanaka, Y.; Kamimura, A. Characteristics of hydraulic and electric servo motors. Actuators 2022, 11, 11. [Google Scholar] [CrossRef]
- Baballe, M.A.; Bello, M.I.; Umar, A.A.; Shehu, A.K.; Bello, D.; Abdullahi, F.T. Different Types of Servo Motors and Their Applications. In Proceedings of the 1st International Conference on Engineering and Applied Natural Sciences, Konya, Turkey, 10–13 May 2022; pp. 974–979. [Google Scholar]
- Hans, S.; Ghosh, S. Position analysis of brushless direct current motor using robust fixed order H-infinity controller. Assem. Autom. 2020, 40, 211–218. [Google Scholar] [CrossRef]
- Anshory, I.; Robandi, I.; Wirawan, W. Parameters identification BLDC motor: Instrumentations and transfer functions. In Proceedings of MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; p. 11012. [Google Scholar]
- Murali, M.; Arulmozhiyal, R. Investigation on modeling and simulation BLDC motor fed universal actuation system. Rev. Int. De Métodos Numéricos Para Cálculo Y Diseño En Ing. 2021, 37, 1–8. [Google Scholar] [CrossRef]
- Jigang, H.; Hui, F.; Jie, W. A PI controller optimized with modified differential evolution algorithm for speed control of BLDC motor. Autom. Časopis Za Autom. Mjer. Elektron. Računarstvo I Komun. 2019, 60, 135–148. [Google Scholar] [CrossRef]
- Dat, N.T.; Van Kien, C.; Anh, H.P.H. Optimal FOC-PID parameters of BLDC motor system control using parallel PM-PSO optimization technique. Int. J. Comput. Intell. Syst. 2021, 14, 1142–1154. [Google Scholar] [CrossRef]
- Ali, T.; Lin, H.; Wang, Z.K. Design and Simulation of Novel Control Architecture for the Movement of Commercial Aircraft Cabin Door. In Proceedings of the 16th IEEE International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Univ Elect Sci & Technol China, Chengdu, China, 13–15 December 2019; pp. 400–405. [Google Scholar]
- Alzuabidi, O.; Abdulsada, M.A.; Hussein, M.W. Analysis and Modeling of Brushless DC Motor PWM Control Technique Using PSIM Software. In Proceedings of the 2nd International Conference on Emerging Technologies and Intelligent Systems (ICETIS), Electr Network, 3 September 2023; pp. 225–234. [Google Scholar]
- Zhang, Z.; Li, Y. An AEFA-Based Optimum Design of Fuzzy PID Controller for Attitude Control Flywheel with BLDC Motor. Aerospace 2022, 9, 789. [Google Scholar] [CrossRef]
- Intidam, A.; El Fadil, H.; Housny, H.; El Idrissi, Z.; Lassioui, A.; Nady, S.; Jabal Laafou, A. Development and Experimental Implementation of Optimized PI-ANFIS Controller for Speed Control of a Brushless DC Motor in Fuel Cell Electric Vehicles. Energies 2023, 16, 4395. [Google Scholar] [CrossRef]
- Lee, S.; Son, H. Six Steps Commutation Torque and Dynamic Characteristics of Spherical Brushless Direct Current Motor. IEEE Trans. Ind. Electron. 2023, 71, 5045–5054. [Google Scholar] [CrossRef]
- Patel, H.; Chandwani, H. Simulation and experimental verification of modified sinusoidal pulse width modulation technique for torque ripple attenuation in Brushless DC motor drive. Eng. Sci. Technol. Int. J. 2021, 24, 671–681. [Google Scholar] [CrossRef]
- Hussein, T.A.; Mohammed, L.A. Detailed Simulink implementation for induction motor control based on space vector pulse width modulation SVPWM. Indones. J. Electr. Eng. Comput. Sci 2021, 22, 1251–1262. [Google Scholar] [CrossRef]
- Chinmaya, K.; Singh, G.K. Experimental analysis of various space vector pulse width modulation (SVPWM) techniques for dual three-phase induction motor drive. Int. Trans. Electr. Energy Syst. 2019, 29, e2678. [Google Scholar] [CrossRef]
- Siddique, N. Fuzzy Control. In Intelligent Control. Studies in Computational Intelligence; Springer: Cham, Switzerland, 2014; Volume 517. [Google Scholar] [CrossRef]
- Meng, F.; Hu, Y.; Ma, P.; Zhang, X.; Li, Z. Practical Control of a Cold Milling Machine using an Adaptive PID Controller. Appl. Sci. 2020, 10, 2516. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced control strategies of induction machine: Field oriented control, direct torque control and model predictive control. Energies 2018, 11, 120. [Google Scholar] [CrossRef]
- Wang, Y.-G.; Shao, H.-H. Optimal tuning for PI controller. Automatica 2000, 36, 147–152. [Google Scholar] [CrossRef]
- Alkorta, P.; Barambones, O.; Cortajarena, J.A.; Martija, I.; Maseda, F.J. Effective position control for a three-phase motor. Electronics 2020, 9, 241. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Calvo, I.; Velasco, J. Feedforward compensation analysis of piezoelectric actuators using artificial neural networks with conventional PID controller and single-neuron PID based on Hebb learning rules. Energies 2020, 13, 3929. [Google Scholar] [CrossRef]
- Kovacic, Z.; Bogdan, S. Fuzzy Controller Design: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Yang, R.; Gao, Y.; Wang, H.; Ni, X. Fuzzy Neural Network PID Control Used in Individual Blade Control. Aerospace 2023, 10, 623. [Google Scholar] [CrossRef]
- Asghar, A.B.; Naveed, K.; Xiong, G.; Wang, Y. Adaptive Neuro-fuzzy Algorithm for Pitch Control of Variable-speed Wind Turbine. Int. J. Control Autom. Syst. 2022, 20, 3788–3798. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Characteristic Parameters | Parameter Value |
|---|---|
| Rated voltage | 24 |
| Torque constant | 0.18 |
| Speed constant | 32.96 |
| Speed torque gradient | 110 |
| Mechanical time constant | 52.78 |
| Phase resistance | 461 |
| Phase inductance | 64.22 |
| Number of pole pairs | 7 |
| Ambient temperature | 0–55 |
| Maximum Radial Load (Dynamic Load) | 495 |
| Control Method | RMSE |
|---|---|
| PI+PI (without load) | 106.79 |
| FI-NPI (without load) | 99.23 |
| PI+PI (with load) | 103.46 |
| FI-NPI (with load) | 96.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Gu, Q.; Lu, S.; Tian, J.; Yin, Z.; Yin, L.; Zheng, W. FI-NPI: Exploring Optimal Control in Parallel Platform Systems. Electronics 2024, 13, 1168. https://doi.org/10.3390/electronics13071168
Wang R, Gu Q, Lu S, Tian J, Yin Z, Yin L, Zheng W. FI-NPI: Exploring Optimal Control in Parallel Platform Systems. Electronics. 2024; 13(7):1168. https://doi.org/10.3390/electronics13071168
Chicago/Turabian StyleWang, Ruiyang, Qiuxiang Gu, Siyu Lu, Jiawei Tian, Zhengtong Yin, Lirong Yin, and Wenfeng Zheng. 2024. "FI-NPI: Exploring Optimal Control in Parallel Platform Systems" Electronics 13, no. 7: 1168. https://doi.org/10.3390/electronics13071168
APA StyleWang, R., Gu, Q., Lu, S., Tian, J., Yin, Z., Yin, L., & Zheng, W. (2024). FI-NPI: Exploring Optimal Control in Parallel Platform Systems. Electronics, 13(7), 1168. https://doi.org/10.3390/electronics13071168