
3D Phased Array Enabling Extended Field of View in Mobile Satcom Applications



Abstract
1. Introduction
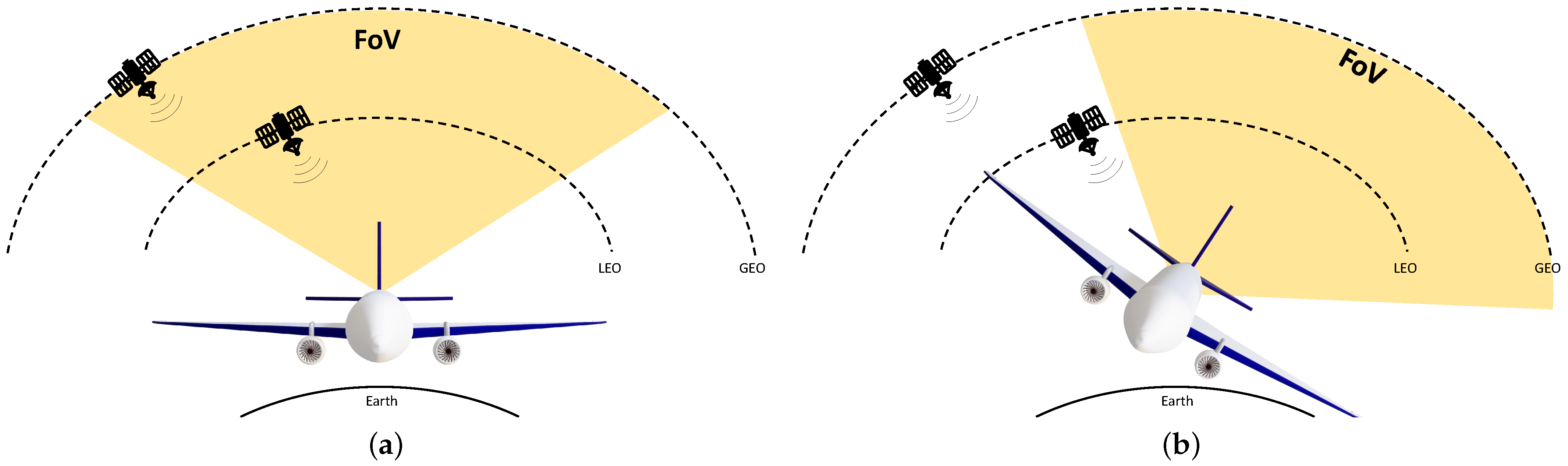
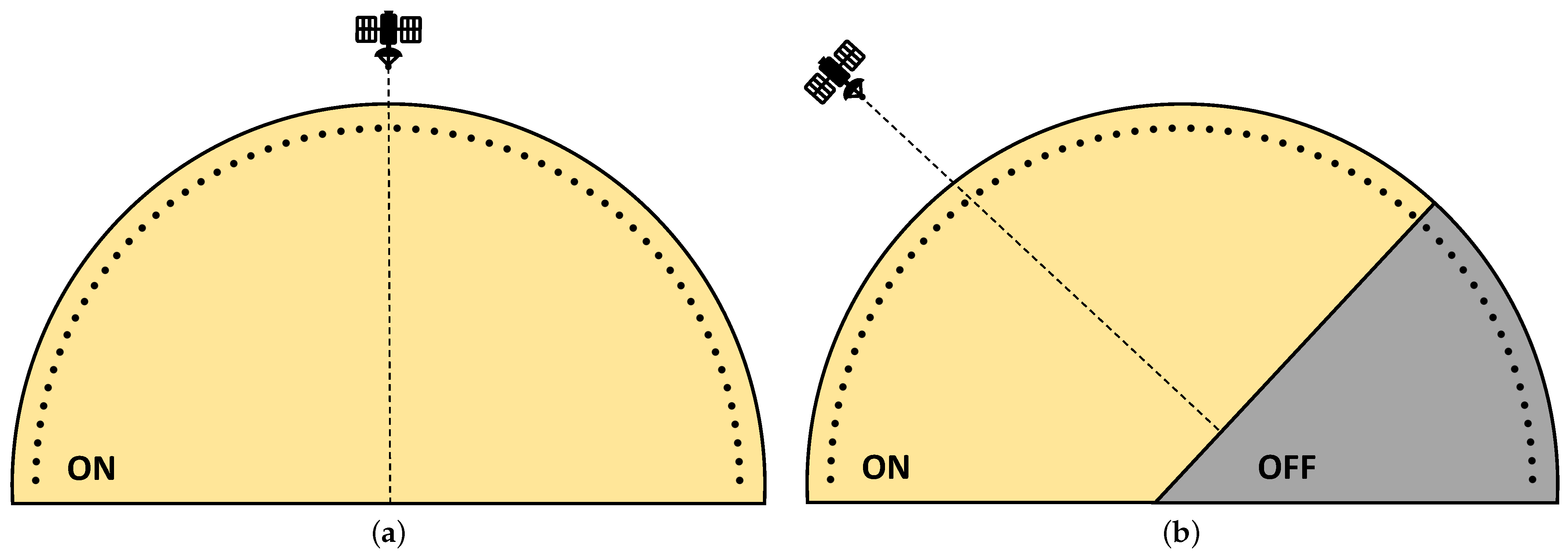
2. Scenario and Requirements: Communications on The Move (COTM)
3. Mathematical Formulation
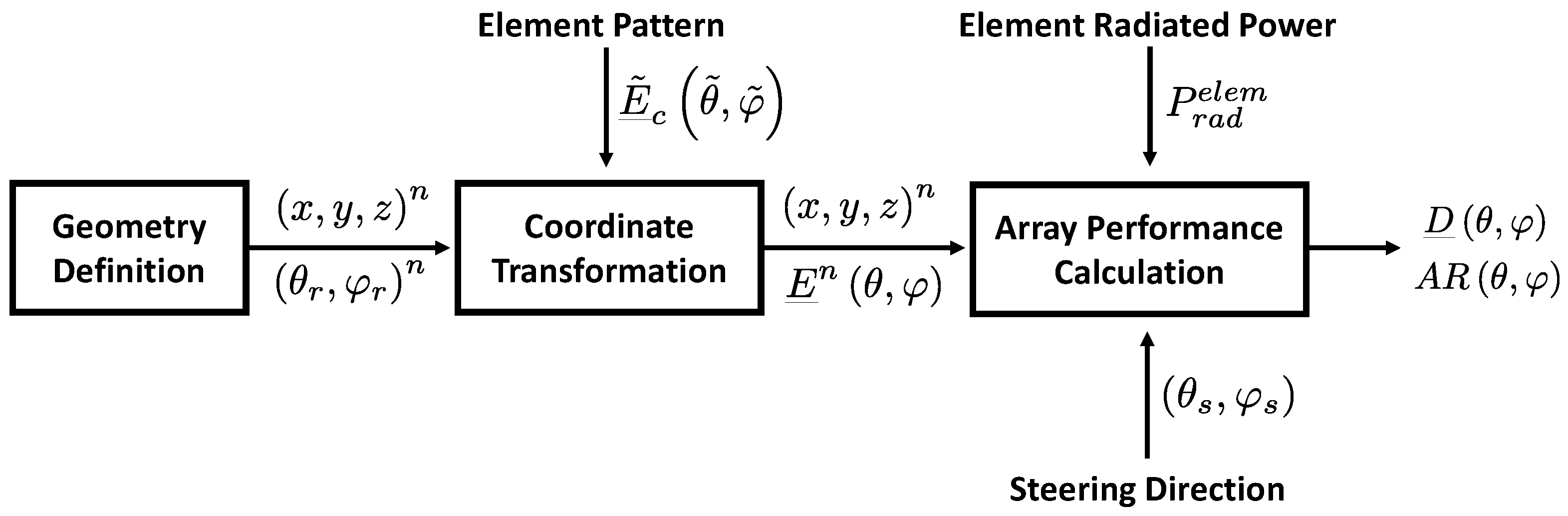
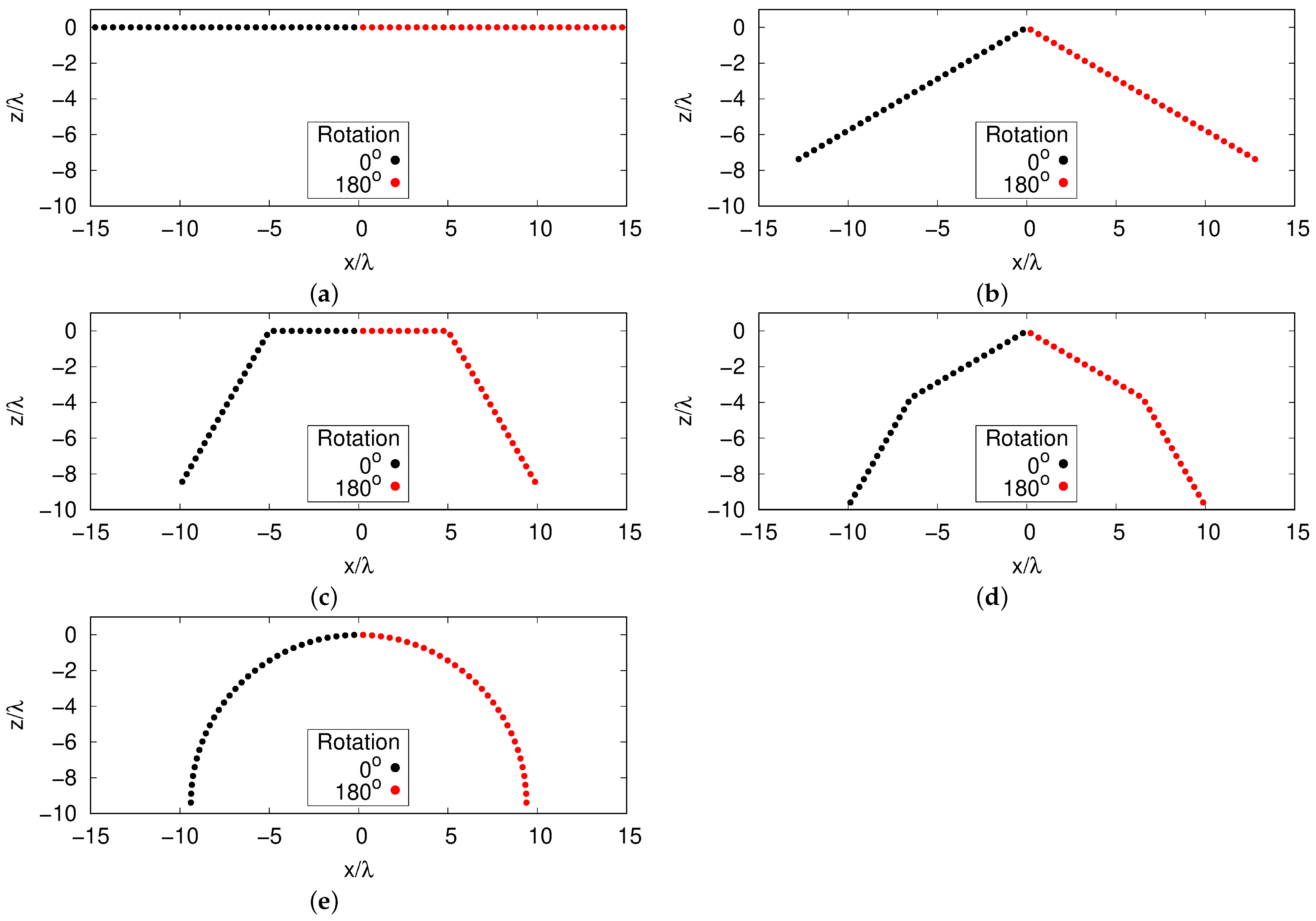
- Geometry Definition: A specific 3D geometry is first created by defining the positions for each antenna element. Moreover, rotation angles are computed for each element.
- Coordinate Transformation: The element pattern computed through full-wave simulation is rotated for each element according to the rotation angles and positions computed in the previous step.
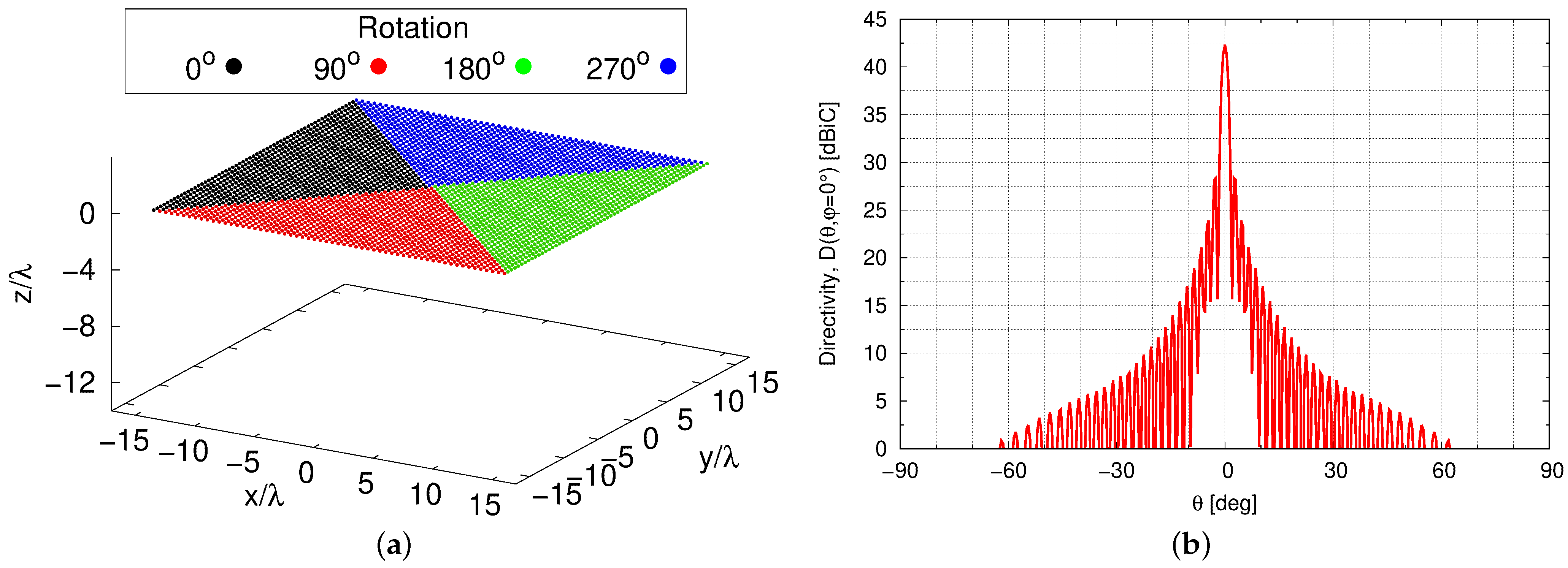
- Array Performance Calculation: Directivity and axial ratio for the array at specific steering angle are computed.
3.1. Geometry Definition
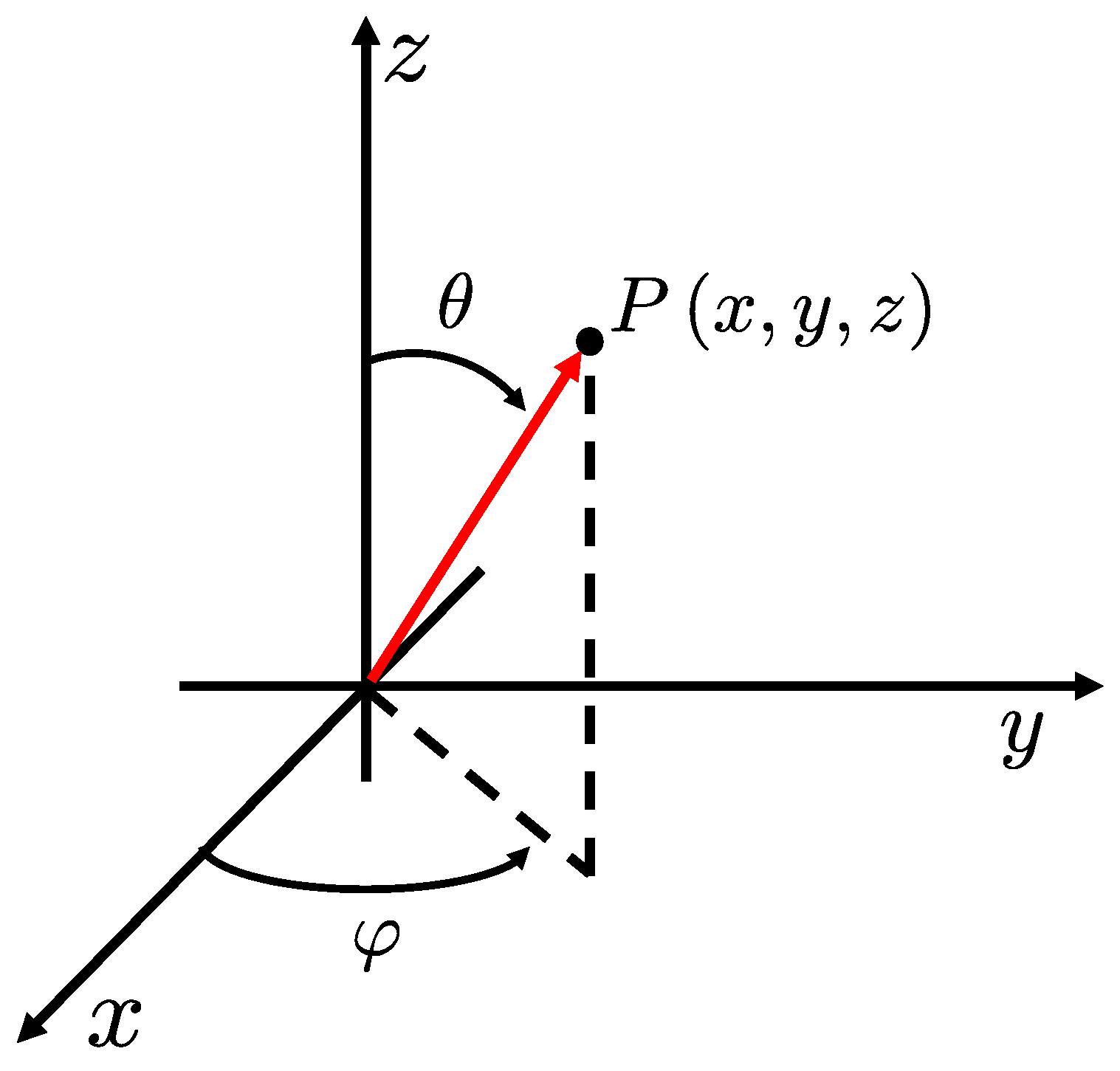
3.2. Coordinate Transformation
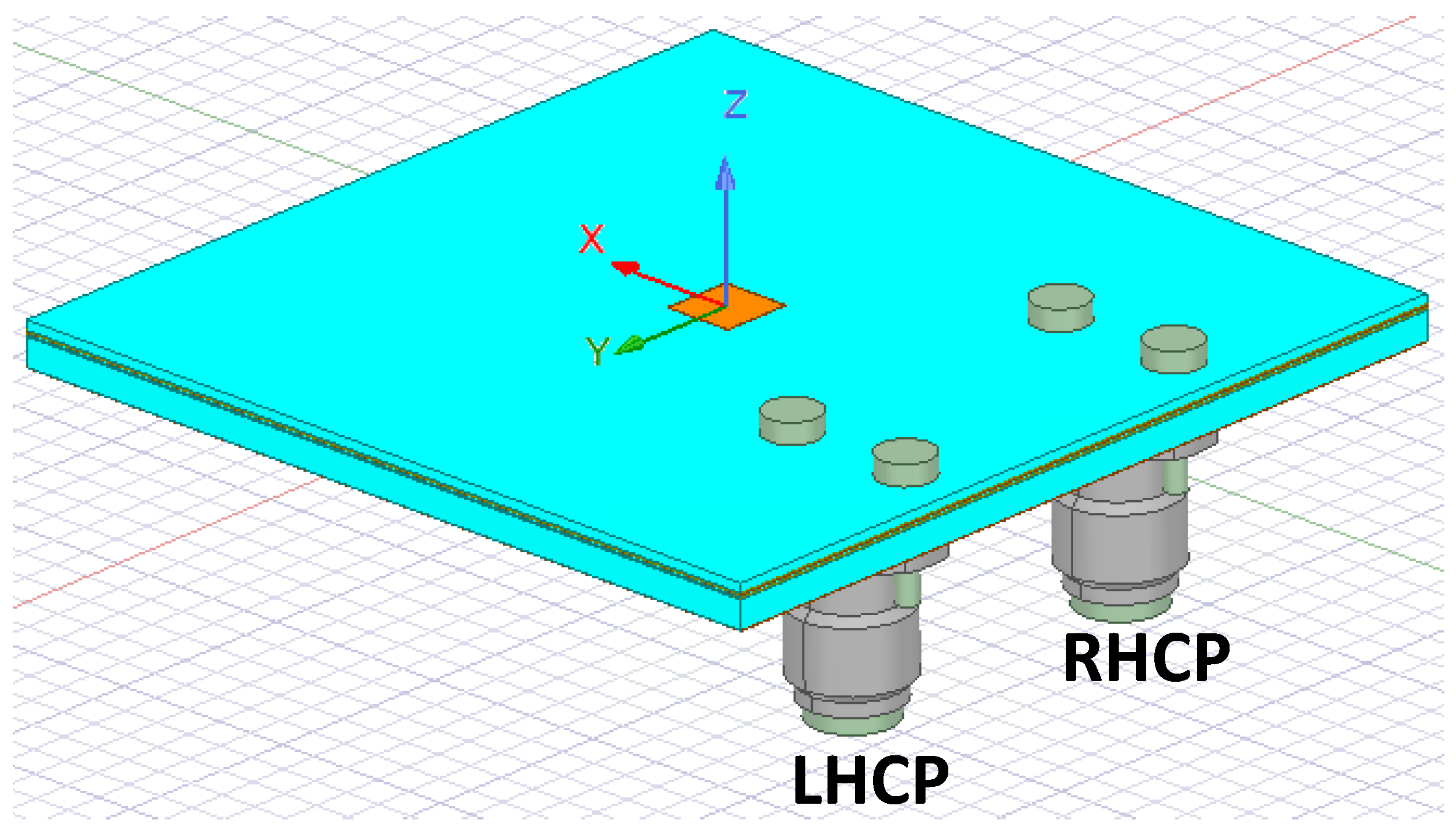
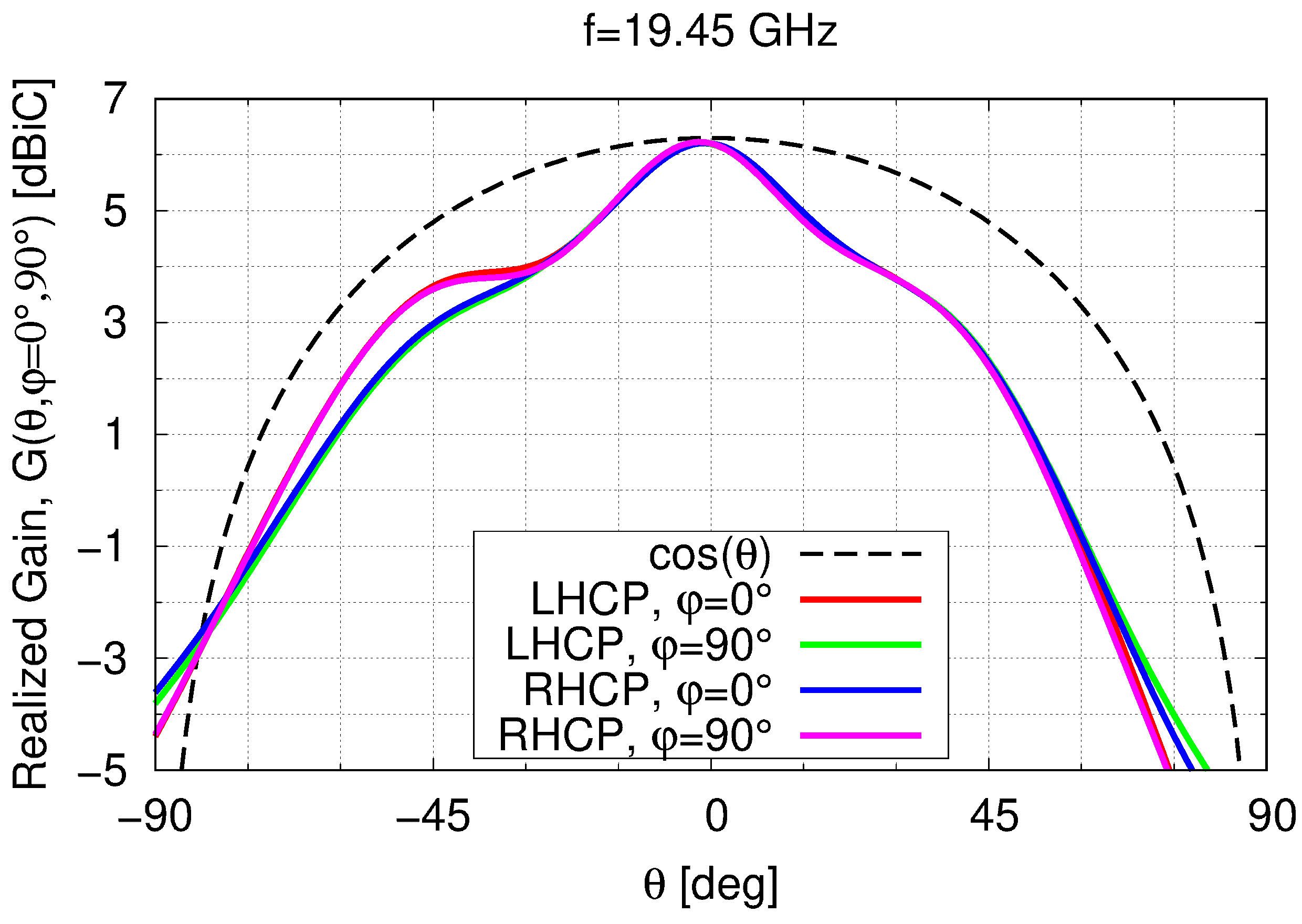
3.2.1. Single Element
3.2.2. Rotation
3.3. Array Far-Field Calculation
3.3.1. Array Excitations
3.3.2. Directivity and Axial Ratio
4. The 3D Array: Methodology and Numerical Results
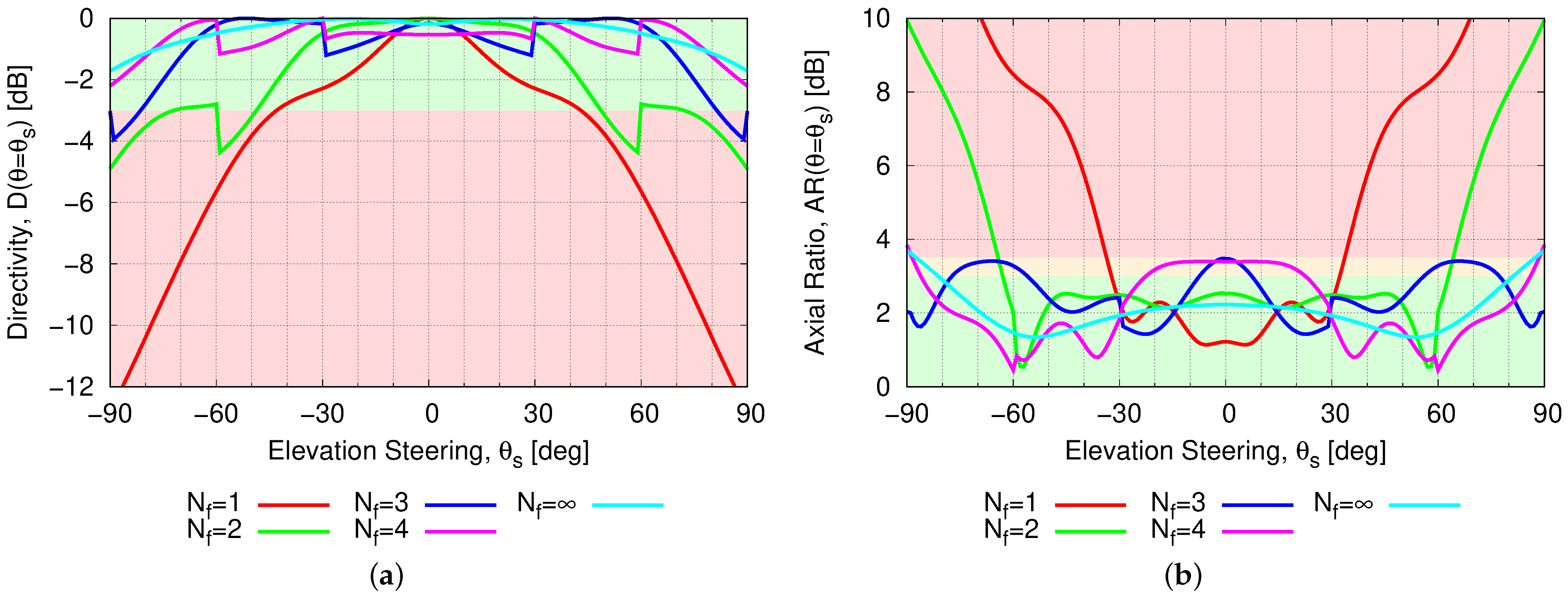
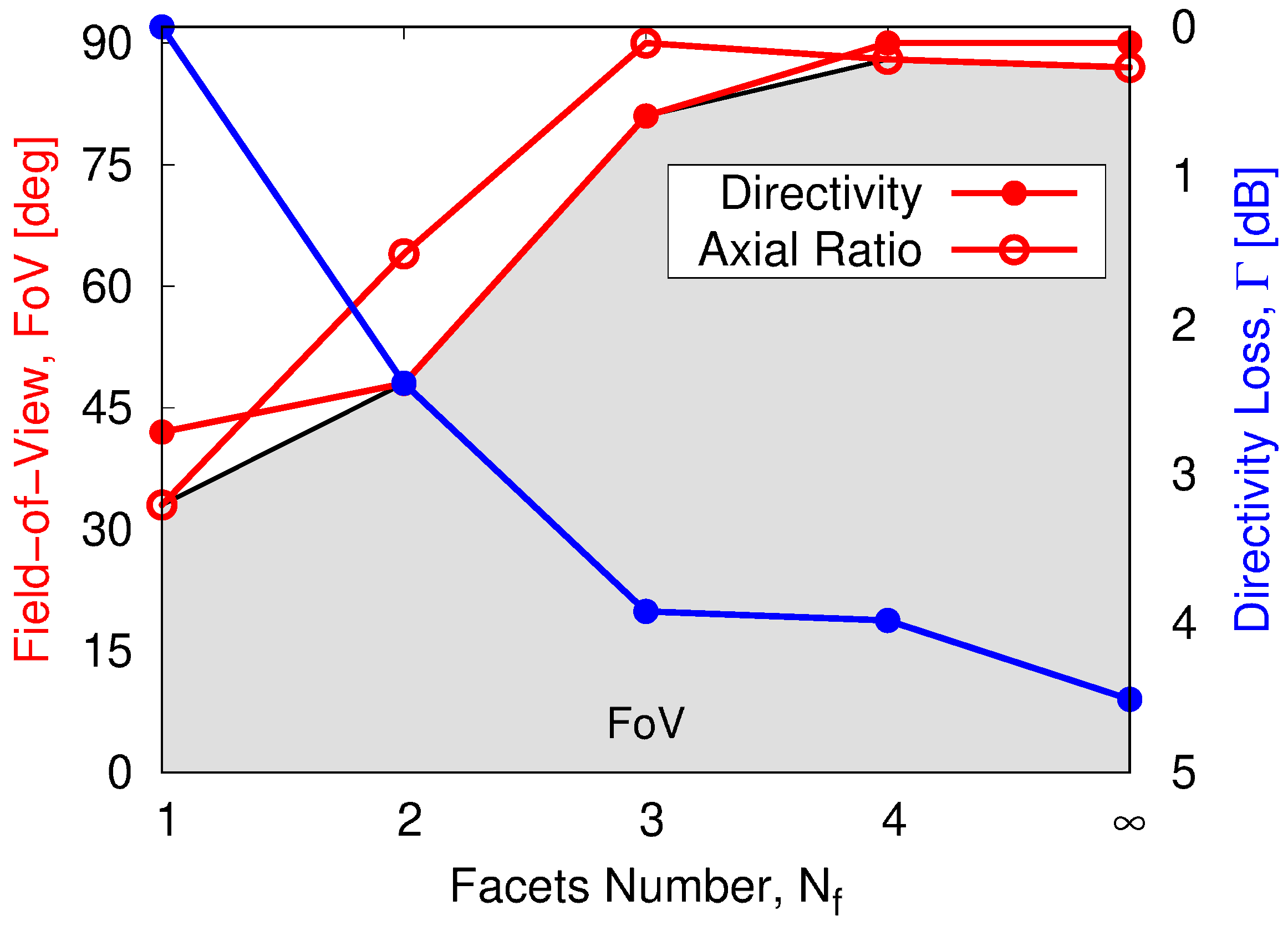
4.1. The Faceted Linear Array
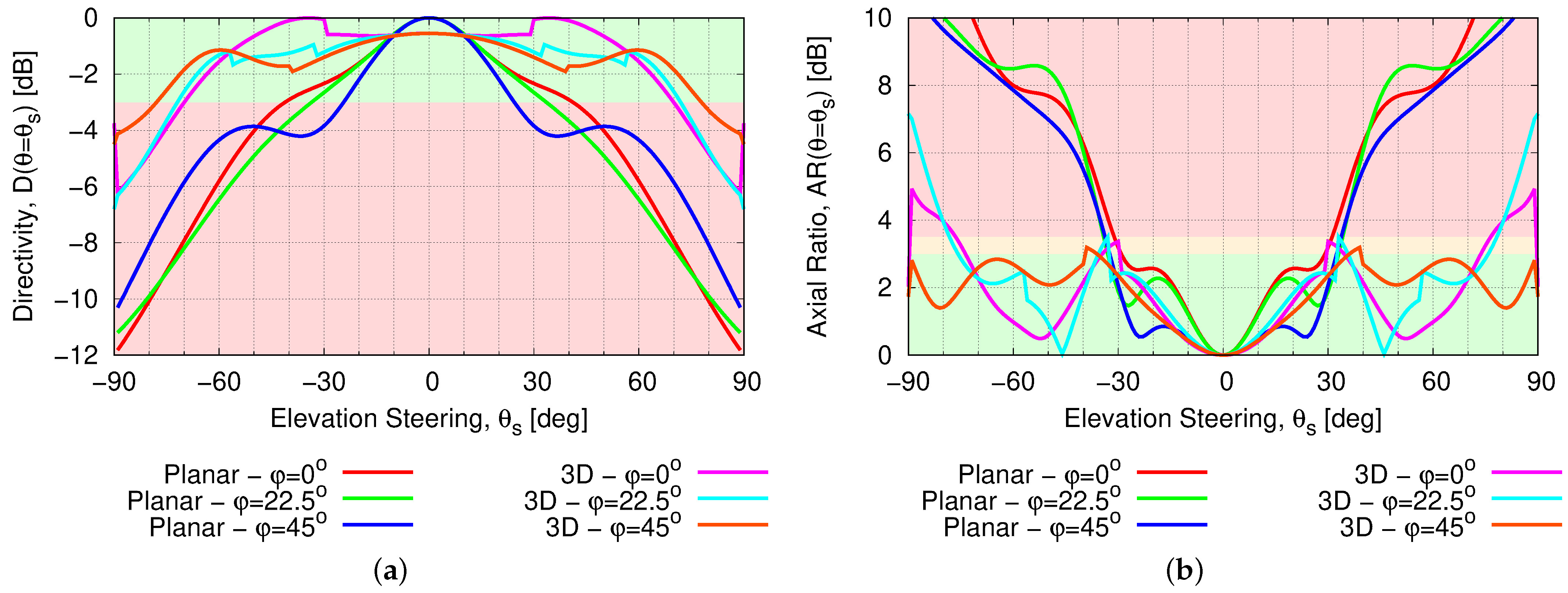
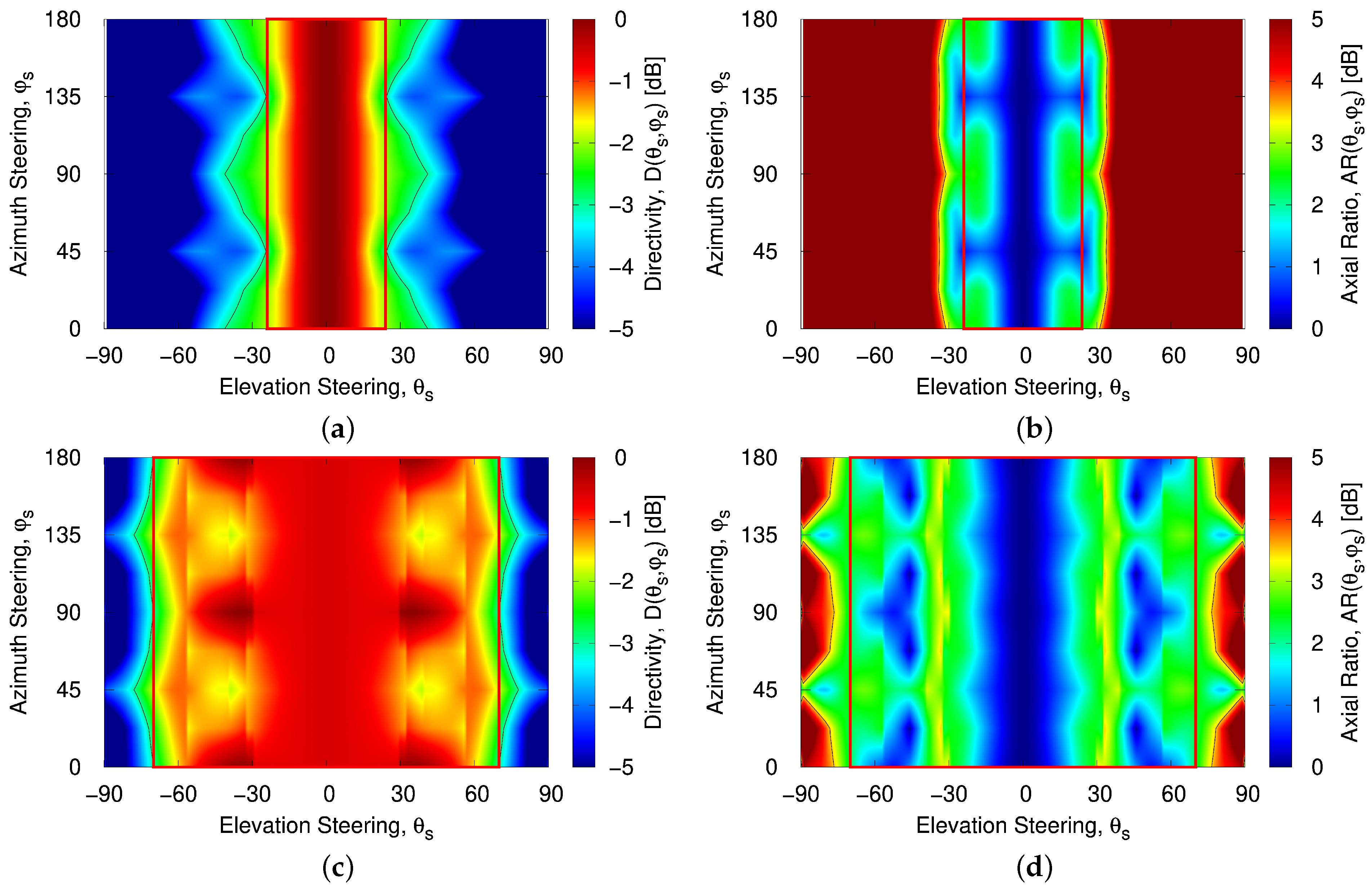
4.2. The 3D Array
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Telecommunications Standards Institute; Satellite Earth Stations and Systems (SES). Technical Report on Antenna Performance Characterization for GSO Mobile Applications; Technical Report TR 103 233 V1.1.1; European Telecommunications Standards Institute: Sophia Antipolis, France, 2016. [Google Scholar]
- Yang, G.; Li, J.; Wei, D.; Xu, R. Study on Wide-Angle Scanning Linear Phased Array Antenna. IEEE Trans. Antennas Propag. 2018, 66, 450–455. [Google Scholar] [CrossRef]
- Yang, G.; Li, J.; Zhou, S.G.; Qi, Y. A Wide-Angle E-Plane Scanning Linear Array Antenna with Wide Beam Elements. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2923–2926. [Google Scholar] [CrossRef]
- Wang, R.; Wang, B.Z.; Hu, C.; Ding, X. Wide-angle scanning planar array with quasi-hemispherical-pattern elements. Sci. Rep. 2017, 7, 2729. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.F.; Ding, X.; Shao, W.; Yu, M.X.; Wang, B.Z. 2-D Planar Wide-Angle Scanning-Phased Array Based on Wide-Beam Elements. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 876–879. [Google Scholar] [CrossRef]
- Ahn, B.; Hwang, I.J.; Kim, K.S.; Chae, S.C.; Yu, J.W.; Lee, H.L. Wide-Angle Scanning Phased Array Antenna using High Gain Pattern Reconfigurable Antenna Elements. Sci. Rep. 2019, 9, 18391. [Google Scholar] [CrossRef]
- Bai, Y.Y.; Xiao, S.; Tang, M.C.; Ding, Z.F.; Wang, B.Z. Wide-Angle Scanning Phased Array with Pattern Reconfigurable Elements. IEEE Trans. Antennas Propag. 2011, 59, 4071–4076. [Google Scholar] [CrossRef]
- Ding, X.; Cheng, Y.F.; Shao, W.; Li, H.; Wang, B.Z.; Anagnostou, D.E. A Wide-Angle Scanning Planar Phased Array with Pattern Reconfigurable Magnetic Current Element. IEEE Trans. Antennas Propag. 2017, 65, 1434–1439. [Google Scholar] [CrossRef]
- Federico, G.; Song, Z.; Theis, G.; Caratelli, D.; Smolders, A.B. Multi-Mode Antennas for Ultra-Wide-Angle Scanning Millimeter-Wave Arrays. IEEE Open J. Antennas Propag. 2023, 4, 912–923. [Google Scholar] [CrossRef]
- Ji, B.; Yang, G. Wide-Angle Scanning Phased Array Antenna. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019; pp. 2065–2066. [Google Scholar] [CrossRef]
- Yang, G.; Li, J.; Xu, R.; Ma, Y.; Qi, Y. Improving the Performance of Wide-Angle Scanning Array Antenna with a High-Impedance Periodic Structure. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1819–1822. [Google Scholar] [CrossRef]
- Yang, G.; Zhang, Y.; Zhang, S. Wide-Band and Wide-Angle Scanning Phased Array Antenna for Mobile Communication System. IEEE Open J. Antennas Propag. 2021, 2, 203–212. [Google Scholar] [CrossRef]
- Yun, J.; Park, D.; Jang, D.; Hwang, K.C. Design of an Active Beam-Steering Array with a Perforated Wide-Angle Impedance Matching Layer. IEEE Trans. Antennas Propag. 2021, 69, 6028–6033. [Google Scholar] [CrossRef]
- Hu, C.H.; Wang, B.Z.; Gao, G.F.; Wang, R.; Xiao, S.Q.; Ding, X. Conjugate Impedance Matching Method for Wideband and Wide-Angle Impedance Matching Layer with 70° Scanning in the H-Plane. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 63–67. [Google Scholar] [CrossRef]
- Gandini, E.; Silvestri, F.; Benini, A.; Gerini, G.; Martini, E.; Maci, S.; Viganò, M.C.; Toso, G.; Monni, S. A Dielectric Dome Antenna with Reduced Profile and Wide Scanning Capability. IEEE Trans. Antennas Propag. 2021, 69, 747–759. [Google Scholar] [CrossRef]
- Sun, F.; Zhang, S.; He, S. A General Method for Designing a Radome to Enhance the Scanning Angle of a Phased Array Antenna. Prog. Electromagn. Res. 2014, 145, 203–212. [Google Scholar] [CrossRef]
- Sun, F.; He, S. Extending the scanning angle of a phased array antenna by using a null-space medium. Sci. Rep. 2014, 4, 6832. [Google Scholar] [CrossRef]
- Josefsson, L.; Persson, P. Conformal Array Antenna Theory and Design; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Boulos, F.; Elmarissi, W.; Caizzone, S. A GNSS Conformal Antenna Achieving Hemispherical Coverage in L1/L5 Band. In Proceedings of the 2022 16th European Conference on Antennas and Propagation (EuCAP), Madrid, Spain, 27 March–1 April 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Xiao, S.; Yang, S.; Zhang, H.; Xiao, Q.; Chen, Y.; Qu, S.W. Practical Implementation of Wideband and Wide-Scanning Cylindrically Conformal Phased Array. IEEE Trans. Antennas Propag. 2019, 67, 5729–5733. [Google Scholar] [CrossRef]
- Kim, Y.B.; Lim, S.; Lee, H.L. Electrically Conformal Antenna Array with Planar Multipole Structure for 2-D Wide Angle Beam Steering. IEEE Access 2020, 8, 157261–157269. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, B.z.; Duan, J.p.; Cui, J.; Xu, Y.; Tian, Y.; Yan, L.; Xiong, M.; Jia, Q. Wide Solid Angle Beam-Switching Conical Conformal Array Antenna With High Gain for 5G Applications. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2304–2308. [Google Scholar] [CrossRef]
- Pfeiffer, C.; Massman, J. A UWB Low-Profile Hemispherical Array for Wide Angle Scanning. IEEE Trans. Antennas Propag. 2023, 71, 508–517. [Google Scholar] [CrossRef]
- Knott, P. Design and Experimental Results of a Spherical Antenna Array for a Conformal Array Demonstrator. In Proceedings of the 2007 2nd International ITG Conference on Antennas, Munich, Germany, 28–30 March 2007; pp. 120–123. [Google Scholar] [CrossRef]
- Knittel, G. Choosing the number of faces of a phased-array antenna for hemisphere scan coverage. IEEE Trans. Antennas Propag. 1965, 13, 878–882. [Google Scholar] [CrossRef]
- Kmetzo, J. An analytical approach to the coverage of a hemisphere by n planar phased arrays. IEEE Trans. Antennas Propag. 1967, 15, 367–371. [Google Scholar] [CrossRef]
- Tomasic, B.; Turtle, J.; Liu, S.; Schmier, R.; Bharj, S.; Oleski, P. The geodesic dome phased array antenna for satellite control and communication-subarray design, development and demonstration. In Proceedings of the IEEE International Symposium on Phased Array Systems and Technology, Boston, MA, USA, 14–17 October 2003; pp. 411–416. [Google Scholar] [CrossRef]
- Munno, F. Conformal Array Geometry for Hemispherical Coverage. Electronics 2021, 10, 903. [Google Scholar] [CrossRef]
- Boulos, F.; Riemschneider, G.F.; Caizzone, S. 3D Phased Array Architecture for Field-of-View Enhancement in Satcom COTM Terminals. In Proceedings of the 2023 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (USNC-URSI), Portland, OR, USA, 23–28 July 2023. [Google Scholar] [CrossRef]
- Adithyababu, A.P.T.; Boulos, F.; Caizzone, S. Analysis of user terminal trade-offs for future satellite communication applications. In Proceedings of the 27th Ka and Broadband Communications Conference, Stresa, Italy, 18–21 October 2022. [Google Scholar]
- Riemschneider, G.F. Analysis of Bandwidth and Field-of-View Improvement Techniques for Satellite Communication Phased Arrays in Ka Band. Master’s Thesis, Institute of High-Frequency Technology, Technische Universität Hamburg (TUHH), Hamburg, Germany, 2022. [Google Scholar]
- Recommendation ITU-R V.431-8 (08/2015) Nomenclature of the Frequency and Wavelength Bands Used in Telecommunications. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/v/R-REC-V.431-8-201508-I!!PDF-E.pdf (accessed on 11 December 2023).
- Host, N.K.; Ricciardi, G.F.; Krichene, H.A.; Ho, M.T. A Sine-Space, Mixed-Coordinate Polarization Representation for Rotated Phased Arrays: Using a linear algebra calculus to transform radiated fields. IEEE Antennas Propag. Mag. 2022, 64, 71–81. [Google Scholar] [CrossRef]
- Milligan, T.A. Modern Antenna Design; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Haupt, R.L. Antenna Arrays: A Computational Approach; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Khalifa, I.; Vaughan, R.G. Geometric Design and Comparison of Multifaceted Antenna Arrays for Hemispherical Coverage. IEEE Trans. Antennas Propag. 2009, 57, 2608–2614. [Google Scholar] [CrossRef]
- Carlisle Interconnect Technologies. FlightGear™ ARINC 791. 2021. Available online: https://www.carlisleit.com/markets/commercial-aerospace/ifeci/connectivity-kits/arinc-791-universal-installation-solutions/ (accessed on 3 January 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Figure of Merit | Value |
|---|---|
| Directivity, | ≈40 dBiC |
| Axial Ratio, | <3 dB (tolerance dB) |
| Scan Range | > |
| Maximum Directivity Scan Loss | 3 dB |
| Geometry | Field of View (deg) | Directivity Loss, (dB) | |||
|---|---|---|---|---|---|
| Directivity | Axial Ratio | Total | |||
| Linear | 1 | 0 | |||
| Triangular | 2 | ||||
| Trapezoidal | 3 | ||||
| 4-Segment | 4 | ||||
| Conformal | ∞ | ||||
| Geometry | N | Scan Range (deg) | Directivity Loss, (dB) | Max Directivity (dBiC) | |||
|---|---|---|---|---|---|---|---|
| Directivity | Axial Ratio | Total | |||||
| Planar | ∞ | 3600 | 0 | ||||
| 3D T1 | 5 | 3936 | |||||
| 3D T2 | 5 | 6180 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boulos, F.; Riemschneider, G.F.; Caizzone, S. 3D Phased Array Enabling Extended Field of View in Mobile Satcom Applications. Electronics 2024, 13, 310. https://doi.org/10.3390/electronics13020310
Boulos F, Riemschneider GF, Caizzone S. 3D Phased Array Enabling Extended Field of View in Mobile Satcom Applications. Electronics. 2024; 13(2):310. https://doi.org/10.3390/electronics13020310
Chicago/Turabian StyleBoulos, Federico, Georg Frederik Riemschneider, and Stefano Caizzone. 2024. "3D Phased Array Enabling Extended Field of View in Mobile Satcom Applications" Electronics 13, no. 2: 310. https://doi.org/10.3390/electronics13020310
APA StyleBoulos, F., Riemschneider, G. F., & Caizzone, S. (2024). 3D Phased Array Enabling Extended Field of View in Mobile Satcom Applications. Electronics, 13(2), 310. https://doi.org/10.3390/electronics13020310