Figure 1.
MEMS accelerometer structure (X axis) [
14].
Figure 1.
MEMS accelerometer structure (X axis) [
14].
Figure 2.
MEDIPOST device and its environment.
Figure 2.
MEDIPOST device and its environment.
Figure 3.
Internal structure of the analog signal path or readout integrated circuit (ROIC), including: capacitance Mismatch Compensation Circuit (MCC), Digital Control Circuit (DCC), capacitance to voltage (C2V) converter, first-stage differential amplifier (AMP1) with a fixed gain of 4, second-stage single-ended amplifier (AMP2) with a configurable gain from 1 to 8, 10-bit analog to digital voltage converter (ADC).
Figure 3.
Internal structure of the analog signal path or readout integrated circuit (ROIC), including: capacitance Mismatch Compensation Circuit (MCC), Digital Control Circuit (DCC), capacitance to voltage (C2V) converter, first-stage differential amplifier (AMP1) with a fixed gain of 4, second-stage single-ended amplifier (AMP2) with a configurable gain from 1 to 8, 10-bit analog to digital voltage converter (ADC).
Figure 4.
MEMS layout and microphoto [
14] with removed lid (Z, Y, and X axis accelerometers from left to right) and ROIC layout and microphoto (X, Y, and Z readout channels from top to bottom).
Figure 4.
MEMS layout and microphoto [
14] with removed lid (Z, Y, and X axis accelerometers from left to right) and ROIC layout and microphoto (X, Y, and Z readout channels from top to bottom).
Figure 5.
Application of PCB boards in ROIC test setups; the second (b) version of the PCB (used in (b–d) test setups) was remade from the first (a) version with a different power supply block and produced by a different manufacturer.
Figure 5.
Application of PCB boards in ROIC test setups; the second (b) version of the PCB (used in (b–d) test setups) was remade from the first (a) version with a different power supply block and produced by a different manufacturer.
Figure 6.
Application of PCB boards in MEMS and ROIC test setups; the second (
b) version of the PCB was remade from the first (
a) version with a different power supply block and produced by a different manufacturer; the (
c) PCB version is an adaptation of the (
b) version; the (
d) version is based on the same PCB version as in the ROIC test setups presented in
Figure 5b,c,d.
Figure 6.
Application of PCB boards in MEMS and ROIC test setups; the second (
b) version of the PCB was remade from the first (
a) version with a different power supply block and produced by a different manufacturer; the (
c) PCB version is an adaptation of the (
b) version; the (
d) version is based on the same PCB version as in the ROIC test setups presented in
Figure 5b,c,d.
Figure 7.
ROIC #4 specimen with connections removed between its analog inputs and package pins.
Figure 7.
ROIC #4 specimen with connections removed between its analog inputs and package pins.
Figure 8.
Scrutinized test sockets and application of the selected one.
Figure 8.
Scrutinized test sockets and application of the selected one.
Figure 9.
ROIC #5 specimen with removed connections between its analog inputs and package pins.
Figure 9.
ROIC #5 specimen with removed connections between its analog inputs and package pins.
Figure 10.
MEMS and ROIC PCB with the test socket in the thermal chamber.
Figure 10.
MEMS and ROIC PCB with the test socket in the thermal chamber.
Figure 11.
Readout temperature dependence for several tested MEMS and ROIC setups.
Figure 11.
Readout temperature dependence for several tested MEMS and ROIC setups.
Figure 12.
Readout temperature dependence for several test sessions of the MEMS and ROIC #1 setup.
Figure 12.
Readout temperature dependence for several test sessions of the MEMS and ROIC #1 setup.
Figure 13.
Readout temperature dependence for several test sessions of the MEMS and ROIC #2 setup.
Figure 13.
Readout temperature dependence for several test sessions of the MEMS and ROIC #2 setup.
Figure 14.
Readout temperature dependence for the MEMS and ROIC #1 setup.
Figure 14.
Readout temperature dependence for the MEMS and ROIC #1 setup.
Figure 15.
Readout temperature dependence for the MEMS and ROIC #3 setup.
Figure 15.
Readout temperature dependence for the MEMS and ROIC #3 setup.
Figure 16.
Readout temperature dependence for all tested ROIC setups.
Figure 16.
Readout temperature dependence for all tested ROIC setups.
Figure 17.
Readout temperature dependence for majority of tested ROIC, CAPS and ROIC, MEMS and ROIC, and MEMS, PCB, and ROIC setups.
Figure 17.
Readout temperature dependence for majority of tested ROIC, CAPS and ROIC, MEMS and ROIC, and MEMS, PCB, and ROIC setups.
Figure 18.
Comparison of readout thermal dependence for two test setups based on the same ROIC specimens: ROIC #5 and MEMS and ROIC #3.
Figure 18.
Comparison of readout thermal dependence for two test setups based on the same ROIC specimens: ROIC #5 and MEMS and ROIC #3.
Figure 19.
Readout temperature dependence for all setup variants of ROIC #4.
Figure 19.
Readout temperature dependence for all setup variants of ROIC #4.
Figure 20.
Readout temperature dependence for ROIC #1 and #4–5 (disconnected inputs).
Figure 20.
Readout temperature dependence for ROIC #1 and #4–5 (disconnected inputs).
Figure 21.
Readout temperature dependence for ROIC #1, #3–5, and CAPS and ROIC #1.
Figure 21.
Readout temperature dependence for ROIC #1, #3–5, and CAPS and ROIC #1.
Figure 22.
Comparison of readout thermal dependence for two test setups based on the same ROIC specimens: ROIC #6 and CAPS and ROIC #1.
Figure 22.
Comparison of readout thermal dependence for two test setups based on the same ROIC specimens: ROIC #6 and CAPS and ROIC #1.
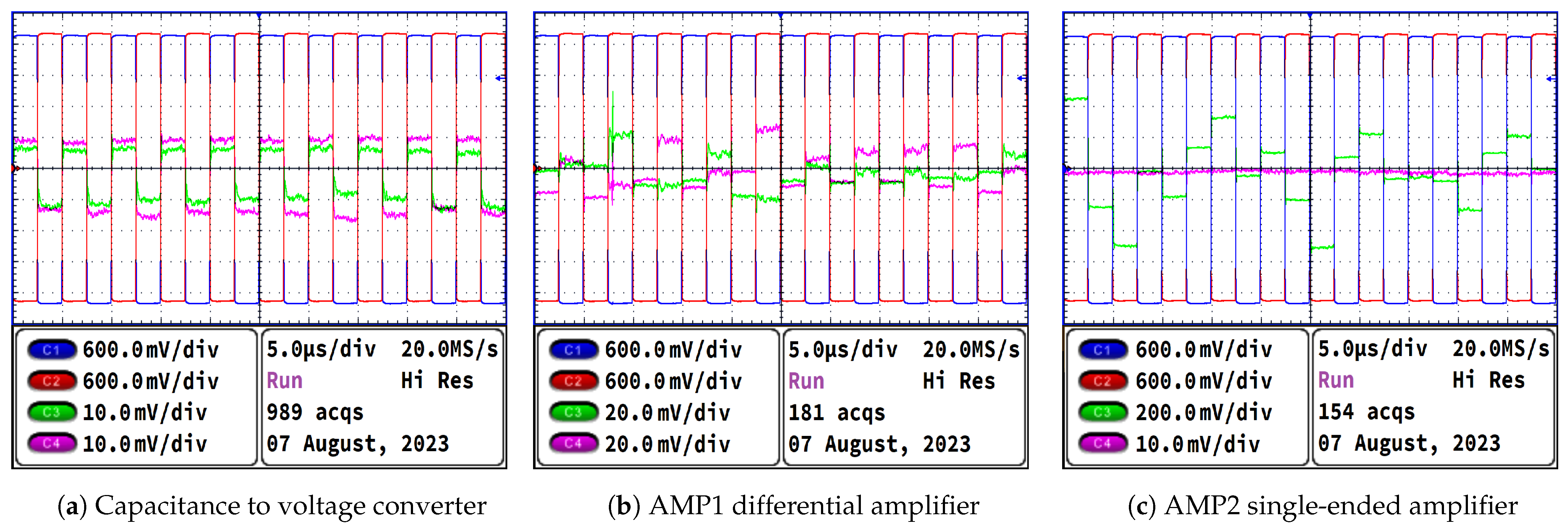
Figure 23.
Clock signals (red and blue) and analog voltages at outputs of signal processing blocks: differential (green and violet) outputs of the C2V and AMP1 and single (green) output of the AMP2.
Figure 23.
Clock signals (red and blue) and analog voltages at outputs of signal processing blocks: differential (green and violet) outputs of the C2V and AMP1 and single (green) output of the AMP2.
Figure 24.
Readout standard deviation measured with an oscilloscope for the ROIC #4 and ROIC #6 setups.
Figure 24.
Readout standard deviation measured with an oscilloscope for the ROIC #4 and ROIC #6 setups.
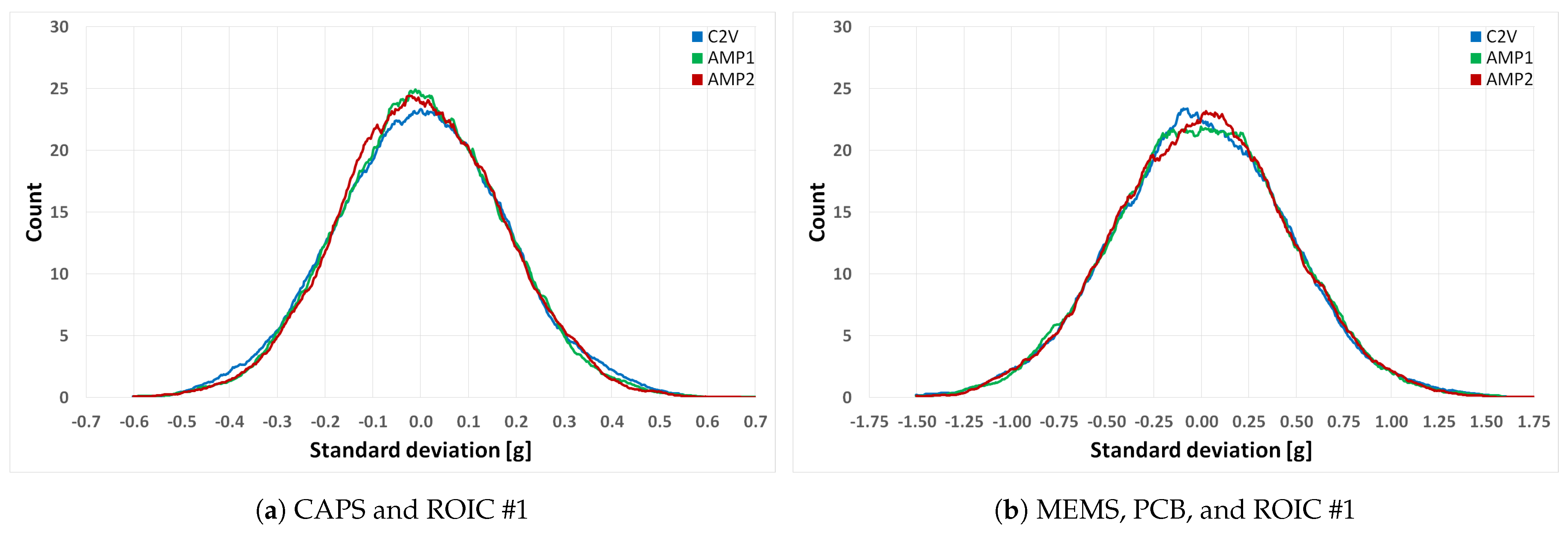
Figure 25.
Readout standard deviation measured with an oscilloscope for the CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 setups.
Figure 25.
Readout standard deviation measured with an oscilloscope for the CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 setups.
Figure 26.
Noise amplitude spectral density measured with an oscilloscope for the ROIC #4 and ROIC #6 setups (blue curve). The orange curve shows the moving average of 100 samples for the same data.
Figure 26.
Noise amplitude spectral density measured with an oscilloscope for the ROIC #4 and ROIC #6 setups (blue curve). The orange curve shows the moving average of 100 samples for the same data.
Figure 27.
Noise amplitude spectral density measured with an oscilloscope for the CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 setups (blue curve). The orange curve shows the moving average of 100 samples for the same data.
Figure 27.
Noise amplitude spectral density measured with an oscilloscope for the CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 setups (blue curve). The orange curve shows the moving average of 100 samples for the same data.
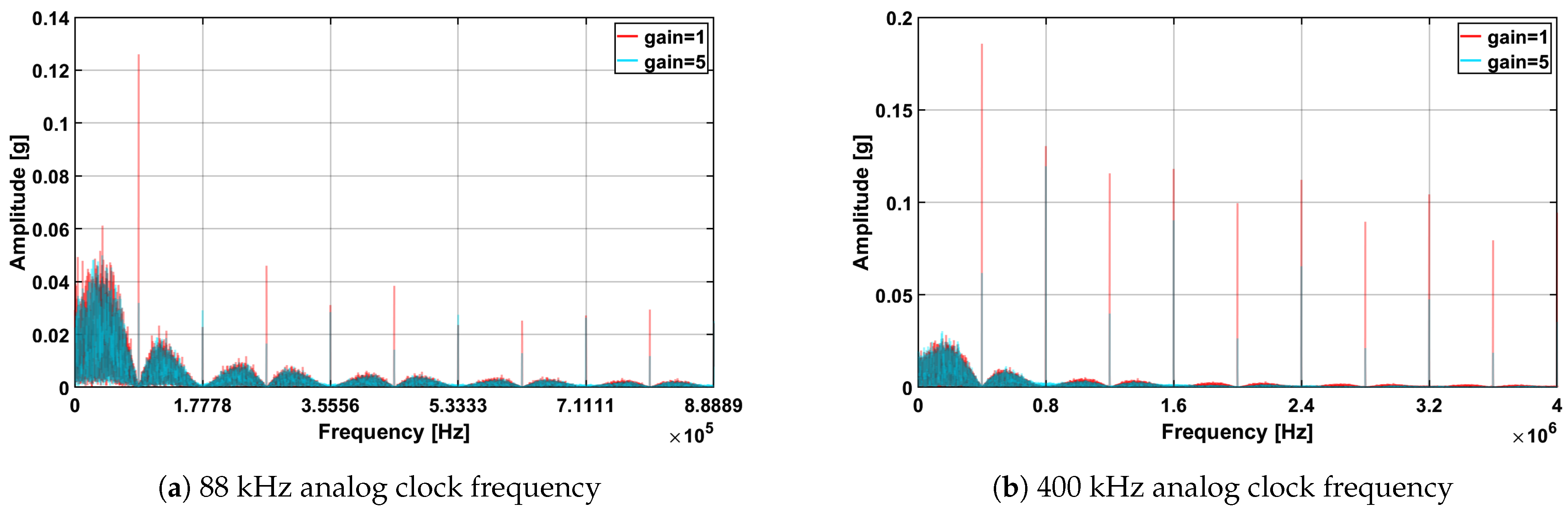
Figure 28.
FFT of the AMP2 output waveform (input of the built-in ADC) for the M&P&R #1.
Figure 28.
FFT of the AMP2 output waveform (input of the built-in ADC) for the M&P&R #1.
Figure 29.
FFT of the AMP2 output waveform (input of the built-in ADC) for ROIC #4 and ROIC #6 at 200 kHz analog clock frequency.
Figure 29.
FFT of the AMP2 output waveform (input of the built-in ADC) for ROIC #4 and ROIC #6 at 200 kHz analog clock frequency.
Figure 30.
FFT of the AMP2 output waveform (input of the built-in ADC) for CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 at 200 kHz analog clock frequency.
Figure 30.
FFT of the AMP2 output waveform (input of the built-in ADC) for CAPS and ROIC #1 and MEMS, PCB, and ROIC #1 at 200 kHz analog clock frequency.
Figure 31.
Envelopes of readout distributions for MEMS, PCB, and ROIC #1 for several operation modes of the thermal chamber.
Figure 31.
Envelopes of readout distributions for MEMS, PCB, and ROIC #1 for several operation modes of the thermal chamber.
Figure 32.
Power spectral density of the thermal chamber during different operation phases.
Figure 32.
Power spectral density of the thermal chamber during different operation phases.
Table 1.
Parameters of the designed capacitive MEMS accelerometer (X axis).
Table 1.
Parameters of the designed capacitive MEMS accelerometer (X axis).
| Parameter | Value |
|---|
| Sensor horizontal (frame) size | 1300 m |
| Sensor vertical (frame) size | 930 m |
| Active layer thickness | 30 m |
| Finger length | 210 m |
| Finger width | 4 m |
| Number of finger pairs (top + bottom part) | 160 |
| Finger’s spacing | 2 m |
| Initial capacitance (top or bottom part) | 3.07 pF |
| Sensitivity | 13.15 fF/g |
| Suspension stiffness | 29.60 N/m |
| Movable part volume | 11.17 mm3 |
| Movable part mass | 26.03 kg |
| First resonant frequency | 5.32 kHz |
| Q factor | 26.22 |
Table 2.
Calculated and measured noise levels from different sources.
Table 2.
Calculated and measured noise levels from different sources.
| | MEMS and ROIC [g/] | ROIC Only [g/] |
|---|
| Amplifier noise | 80.6 | 40.8 |
| Switch noise | 14.2 | 14.2 |
| Voltage reference noise | 5.5 | 5.5 |
| Brownian noise | 3.1 | 0 |
| Total calculated noise from above sources | 82.1 | 43.6 |
| Total simulated noise | 248 | 123 |
| Total measured noise | 839 | 303 |
Table 3.
Explanation of the test setup naming convention and composition (including ROIC, MEMS, ROIC and MEMS, and PCB specimens).
Table 3.
Explanation of the test setup naming convention and composition (including ROIC, MEMS, ROIC and MEMS, and PCB specimens).
| Test Setup Name | MEMS/ROIC Specimen Utilized in the Setup | PCB Specification: Type, Version, and Specimen | Remarks |
|---|
| MEMS and ROIC #1 | MEMS and ROIC #1 | 1× QFN 1, ver. 1, spec. 1 | – |
| MEMS and ROIC #2 | MEMS and ROIC #2 | 1× QFN, ver. 2, spec. 1 | – |
| MEMS and ROIC #3 | MEMS and ROIC #3 | Socket 2, ver. 1, spec. 1 | – |
| MEMS and ROIC #5 | MEMS and ROIC #5 | Socket, ver. 1, spec. 1 | – |
| MEMS, PCB, and ROIC #1 | ROIC #7 and MEMS #11 | 2× QFN 3, ver. 1, spec. 3 | – |
| ROIC #1 | ROIC #1 | 2× QFN, ver. 1, spec. 1 | – |
| ROIC #2 | ROIC #2 | 2× QFN, ver. 2, spec. 1 | The same PCB as ROIC #3 |
| ROIC #3 | ROIC #3 | 2× QFN, ver. 2, spec. 1 | The same PCB as ROIC #2 |
| ROIC #4 | ROIC #4 | 2× QFN, ver. 2, spec. 2 | – |
| ROIC #5 | MEMS and ROIC #3 | Socket, ver. 1, spec. 1 | MEMS and ROIC disconnected |
| ROIC #6 | ROIC #6 | 2× QFN, ver. 1, spec. 4 | – |
| CAPS and ROIC #1 | ROIC #6 | 2× QFN, ver. 1, spec. 4 | Capacitors at ROIC #6 inputs |
Table 4.
Progression of the standard deviation of signals processed in the analog readout path and at the output of the internal ADC.
Table 4.
Progression of the standard deviation of signals processed in the analog readout path and at the output of the internal ADC.
| Test Setup Node | ASIC.4 [g] | ASIC.6 [g] | CAPS and ROIC #1 [g] | M&P&R #1 [g] |
|---|
| C2V | 0.1601 | 0.1808 | 0.1776 | 0.4584 |
| AMP1 | 0.1451 | 0.1691 | 0.1706 | 0.4566 |
| AMP2 | 0.1537 | 0.1715 | 0.1686 | 0.4505 |
| ADC | 0.1691 | 0.1777 | 0.1784 | 0.4682 |
Table 5.
Progression of the standard deviation of signals processed in the analog readout path and at the output of the internal ADC.
Table 5.
Progression of the standard deviation of signals processed in the analog readout path and at the output of the internal ADC.
| Test Setup Node | ASIC.4 [mV] | ASIC.6 [mV] | CAPS and ROIC #1 [mV] | M&P&R #1 [mV] |
|---|
| C2V | 3.015 | 3.398 | 3.339 | 8.617 |
| AMP1 | 10.910 | 12.715 | 12.828 | 34.333 |
| AMP2 | 11.557 | 12.896 | 12.678 | 33.875 |
| ADC | 12.715 | 13.362 | 13.415 | 35.206 |
Table 6.
Progression of standard deviation of signals processed in analog readout path in millivolts (simulation).
Table 6.
Progression of standard deviation of signals processed in analog readout path in millivolts (simulation).
| Test Setup Node | No Input Cap. [mV] | 3 pF Input Cap. [mV] | 3 pf/18 pF Input Cap. [mV] |
|---|
| C2V | 0.7213 | 1.2691 | 2.6015 |
| AMP1 | 2.9906 | 5.1389 | 10.4410 |
| AMP2 | 3.0816 | 5.1913 | 10.4653 |
Table 7.
Progression of standard deviation of signals processed in analog readout path scaled in g units (simulation).
Table 7.
Progression of standard deviation of signals processed in analog readout path scaled in g units (simulation).
| Test Setup Node | No Input Cap. [g] | 3 pF Input Cap. [g] | 3 pf/18 pF Input Cap. [g] |
|---|
| C2V | 0.0384 | 0.0675 | 0.1384 |
| AMP1 | 0.0398 | 0.0683 | 0.1389 |
| AMP2 | 0.0410 | 0.0690 | 0.1392 |
Table 8.
Dependence of readout standard deviation on MEMS excitation voltage for two different test setups.
Table 8.
Dependence of readout standard deviation on MEMS excitation voltage for two different test setups.
| Modulation Voltage [V] | Standard Deviation [g] |
|---|
| 0 | 0.2552 |
| 0.5 | 0.4192 |
| 1.0 | 0.4551 |
| 1.5 | 0.4541 |
| 2.0 | 0.4589 |
| 2.5 | 0.4546 |
| 3.0 | 0.4597 |
Table 9.
Dependence of readout standard deviation on analog clock frequency for MEMS, PCB, and ROIC #1.
Table 9.
Dependence of readout standard deviation on analog clock frequency for MEMS, PCB, and ROIC #1.
| Test Setup Measurement | MEMS, PCB, and ROIC #1 Oscilloscope | MEMS, PCB, and ROIC #1 ADC | MEMS and ROIC #1 ADC |
|---|
| Clock [kHz] | | | |
| 88 | 0.4606 | 0.4558 | 0.4705 |
| 100 | 0.4553 | 0.4655 | 0.5077 |
| 114 | 0.4595 | 0.4657 | 0.4934 |
| 133 | 0.4588 | 0.4649 | 0.4889 |
| 160 | 0.4603 | 0.4607 | 0.4605 |
| 200 | 0.4604 | 0.4625 | 0.4908 |
| 266 | 0.4583 | 0.7947 | 0.9158 |
| 400 | 0.4593 | 0.8246 | 0.8310 |
Table 10.
Dependence of the readout standard deviation on the operation phase of the thermal chamber for the two different test setups.
Table 10.
Dependence of the readout standard deviation on the operation phase of the thermal chamber for the two different test setups.
| Test Setup | Off | Idle | Fan | Activation | Compressor |
|---|
| MEMS, PCB, and ROIC #1 | 0.4765 | 0.4608 | 0.4596 | 0.4559 | 0.4567 |
| MEMS and ROIC #7 | 0.4765 | 0.4768 | 0.4644 | 0.4786 | 0.4729 |


 ,
, 






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}