The different frequency estimation methods are implemented in a reduced medium-voltage testbench in Matlab/Simulink for electromagnetic transient (EMT) simulation. A grid-supporting converter control, which relies on a local frequency measurement, is presented, and the external grid model for frequency studies in the time domain is shown in this section. The simulations run with a sample time .
4.2. Converter Model
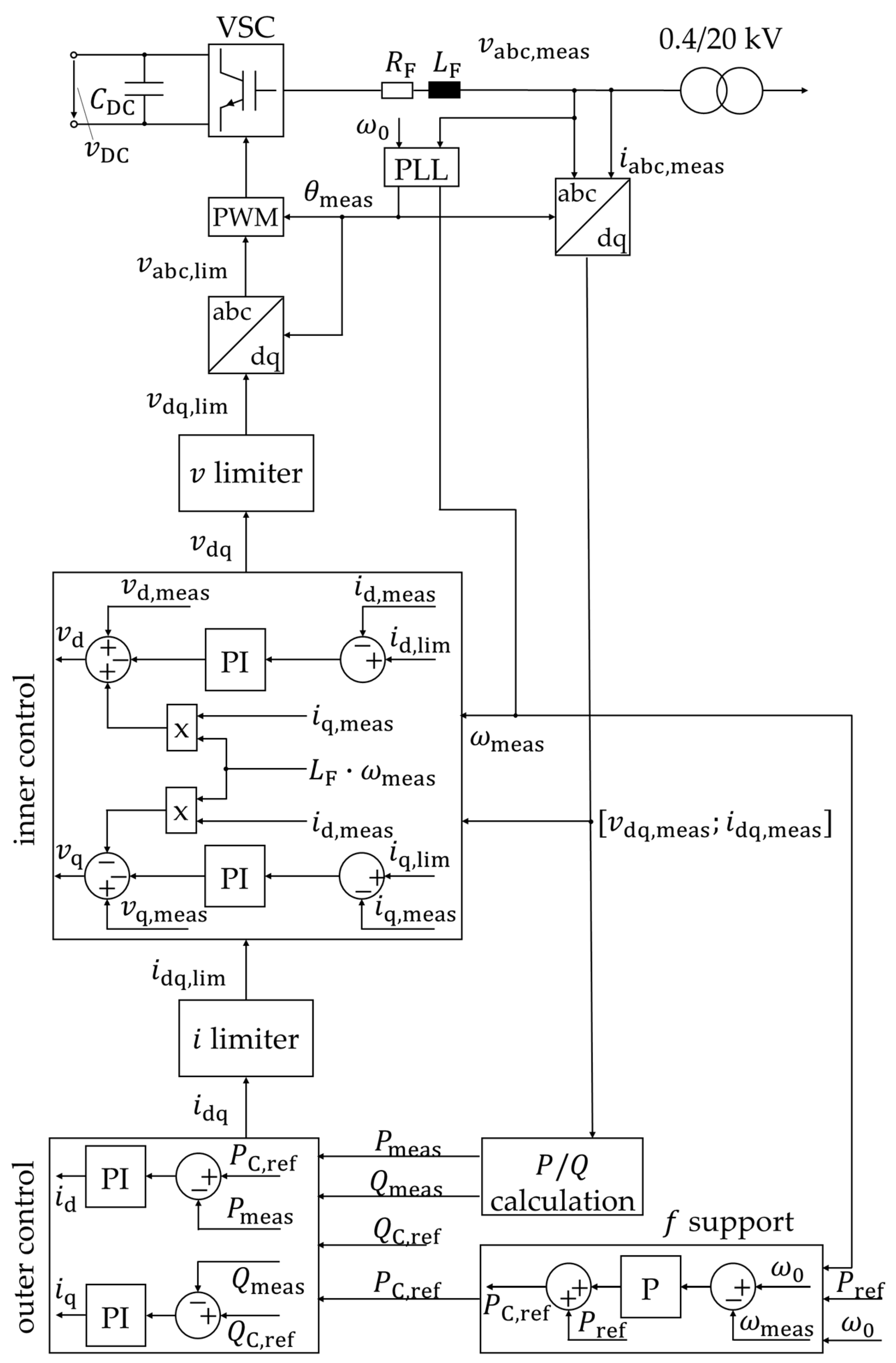
The RES is based on a full-size power VSC and modeled as an average value model with cascaded vector control and grid-supporting characteristics. It fulfills the German grid code requirements for voltage and frequency support. The electrical model is reduced to a controlled three-phase voltage source that is adjusted by the grid-supporting control. Only the grid-side converter and control are modeled under the assumption of a constant power infeed during the time interval of interest of a few seconds. The cascaded vector control of the VSC is implemented in a synchronous reference frame or direct and quadrature (dq) coordinates, as shown in
Figure 9. The upper part of the figure shows the electrical model consisting of the VSC, the DC-side which is modeled as a constant voltage source and DC-link capacitor, the RES transformer and an RL-filter with the filter resistance
RF and the filter inductance
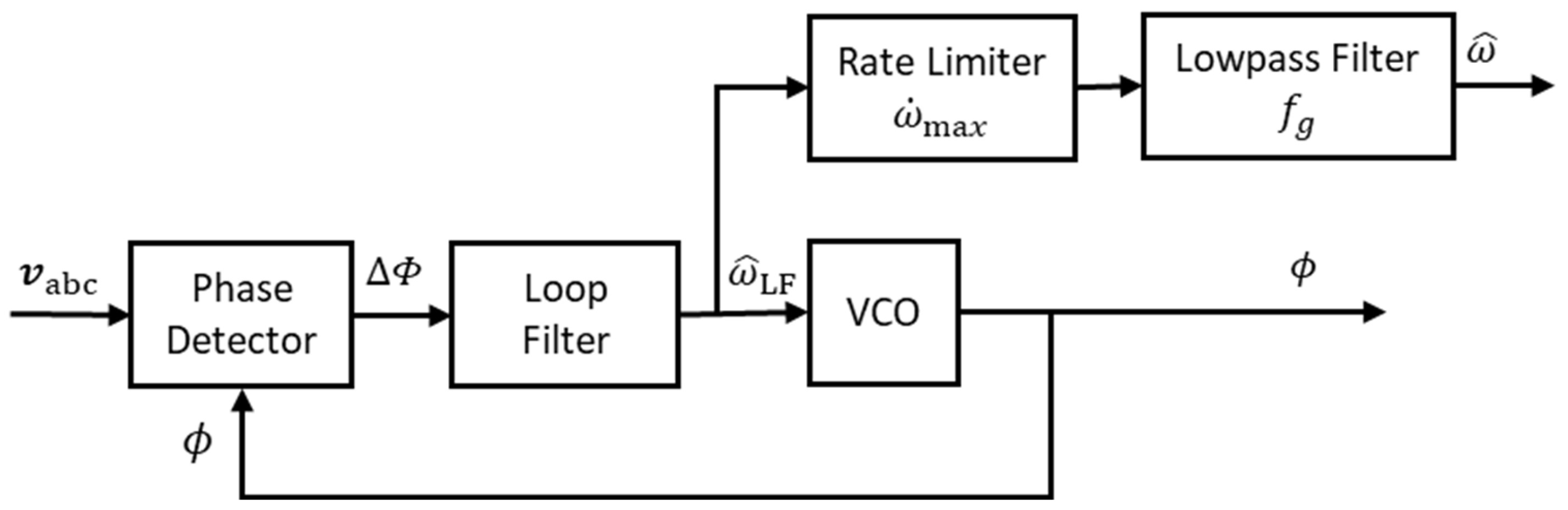
LF. The voltage and current measurements are implemented on the low-voltage side of the transformer. The control of the VSC relies on this local measurement. Since the grid-supporting control is implemented in dq coordinates, the frequency and angle estimation play major roles. Here, the PLL is depicted. However, in the context of this study, different frequency estimation methods are applied. The estimated angle derived from the voltage measurement is passed to the coordinate transformation blocks at the start and the end of the cascaded control.
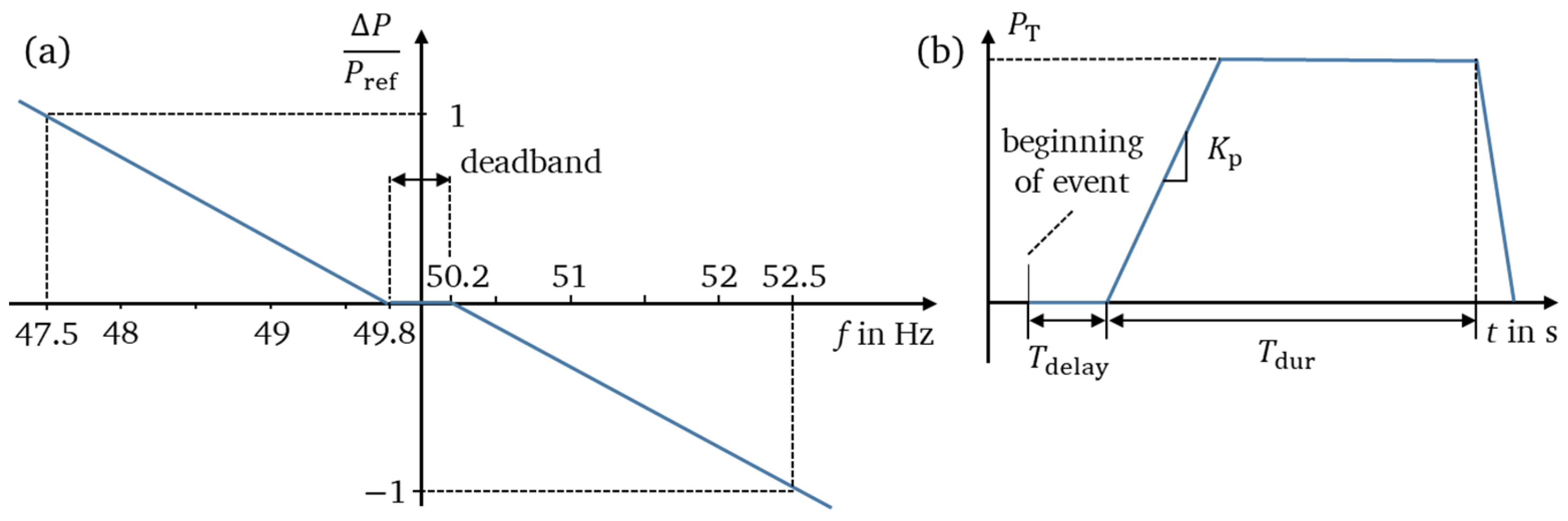
The three main blocks of the control are the frequency support, the outer control, and the inner control. The frequency support control implements the FFR with an active power-frequency droop
P(
f), as depicted in
Figure 2a. Again, this serves as a placeholder and can also be implemented as the constant additional active power, as presented in
Figure 2b. The high-level control or outer control is based on two proportional-integral (PI) controllers that compare the measured active and reactive power with the reference values. The output of the outer control is the reference values of direct and quadrature current
id and
iq, which are passed to the inner control. The low-level control or inner control repeats a similar control for the current, leading to the reference values for direct and quadrature voltage. Additionally, the cross coupling in the inner current control takes into account that due to the filter inductance, the current lags the voltage, which must be considered in dq coordinates. Further details about cross-coupling control can be found, e.g., in [
21]. Limiting the reference current output of the outer control includes the maximum overcurrent capacity of real converters to the model. Finally, the pulse width modulation (PWM) controls the individual switches of the converter. Since the average value model does not include a detailed converter model, the PWM is assumed to be ideal, and the controlled voltage output of the inner control is directly fed to the three-phase voltage source that represents the electrical model.
4.3. External Grid Model
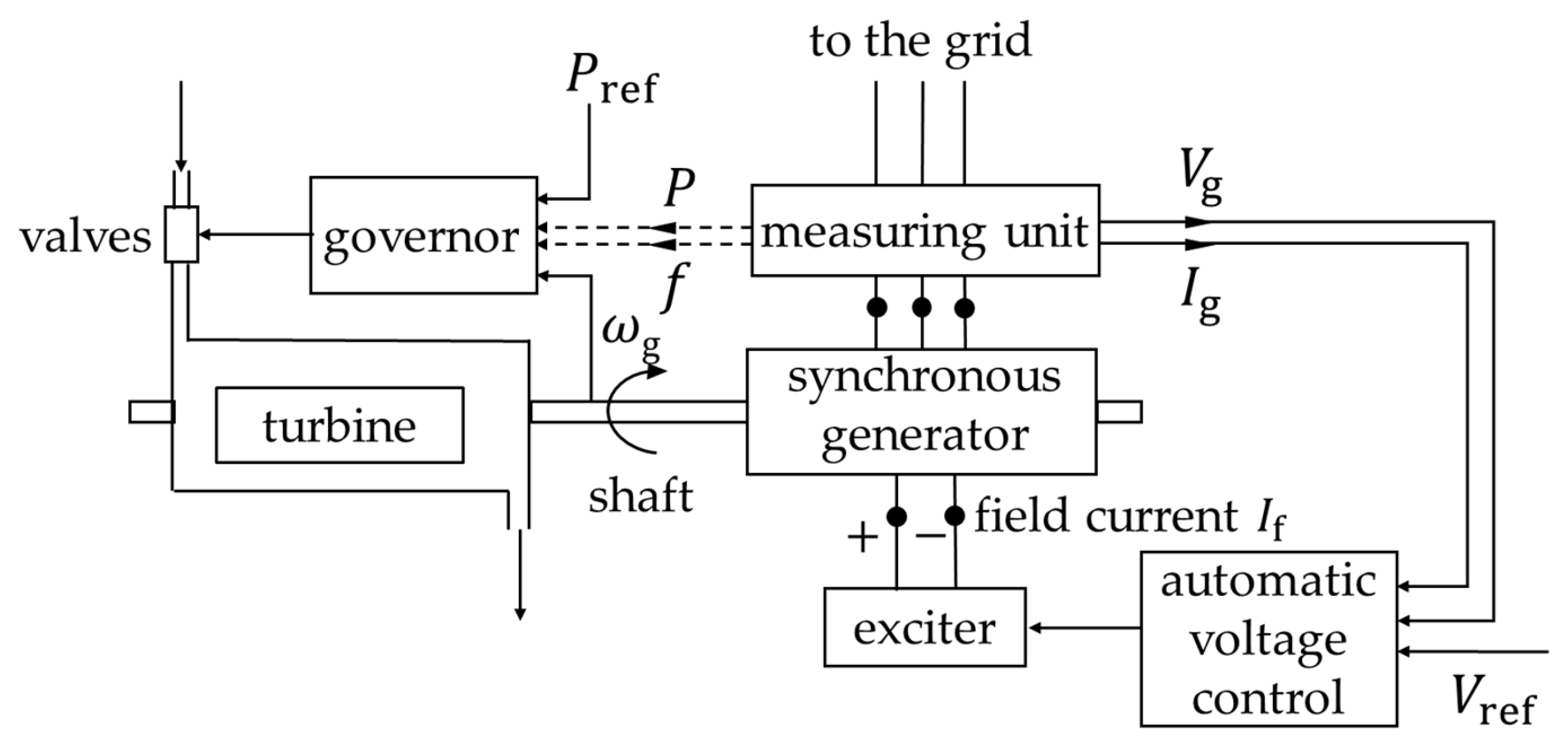
The external grid for dynamic frequency investigations is modeled as a sixth-order SG with a simplified governor, power system stabilizer (PSS), and excitation system. An overview of the synchronous generator control is given in
Figure 10 and can be divided into the power-frequency control, which regulates the steam supply via valves, and the voltage and excitation control, which adjusts the field current. The machine and control parameters are adapted in order to replicate a frequency behavior of a low-inertia power system. The SG model is based on the synchronous machine’s subtransient and transient electromotive forces (emf), the corresponding time constants, and reactances.
The sixth-order SG model consists of four electrical and two mechanical states. The electrical states described in Equations (16)–(19) take into account the armature flux that gradually enters the rotor during a fault and, for this reason, affects the emf. The mechanical states given in Equations (20) and (21) describe the generator rotor swing. A detailed derivation of the equivalent circuit and the differential equations is given in [
22]. The six differential equations describing the generator in a synchronous reference frame (SRF) are given in Equations (16)–(21).
, , , , , are the synchronous, transient, and subtransient reactances in the d-axis and q-axis, , , , , are the excitation emf, and the transient and subtransient emf in the d-axis and q-axis, respectively. ,, , are the d-axis and q-axis open-circuit transient and subtransient time constants and , are the d-axis and q-axis component of the armature current. , H, , , , , , and are the angular momentum, the inertia constant, the rotor speed deviation and its derivation, the angular velocity of the generator, the rated synchronous angular velocity, the mechanical power of the turbine, the electromagnetic air-gap power, and the derivative of the rotor angle, respectively. The derivative quantities are derived with respect to time.
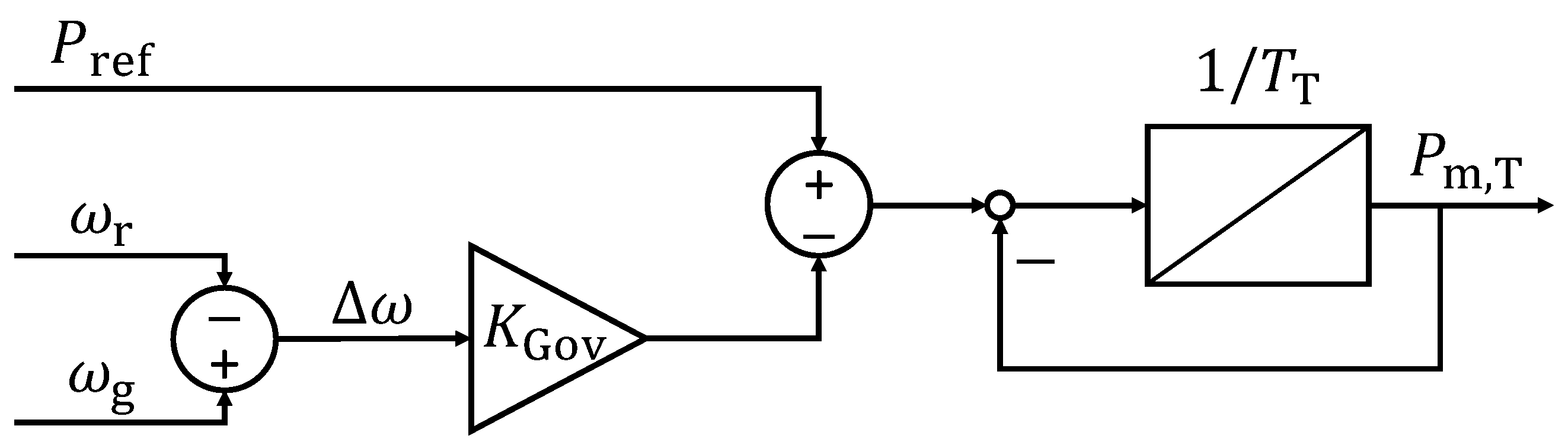
The SG, turbine, and automatic voltage control models are standard models of the Matlab/Simulink library with the parameters given in
Appendix A. The focus of this study is on the governor since it mainly determines the frequency behavior of the generator. The governor control block is shown in
Figure 11 and is based on [
22].
Pref,
Pm,T, ω
r, and ω
g are the reference active power, the mechanical output power of the turbine, the rated frequency, and the measured grid frequency, respectively.
KGov is the proportional gain of the frequency control and the inverse of the governor droop
dGov. The turbine is considered as a time delay with the time constant
TT.
The parametrization of the SG and its control is based on a simple aggregation of multiple generation plants providing an inertial response to the system. The dynamics of the external grid are mainly defined by the installed power Sr of these plants, the inertia constant H, and the governor droop dGov. According to the coherency method, the SG of the overlying high-voltage grid is assumed to be coherent. Therefore, the aggregate model parameters can be derived from Equations (22)–(24). Assuming that in future scenarios, not all of the power plants can provide an inertial response, the aggregate parameters are related to the total system load PL.
The aggregate governor droop
dGov,agg and the aggregate inertia constant
Hagg are both calculated by the sum of the weighted values for each generator and referred to the total load of the system as shown in Equations (22) and (23). The installed power of the aggregate generator
Sr,agg is calculated using Equation (24). It takes into account the aggregate short-circuit power
SSC and the
R to
X ratio of the corresponding system. The subtransient d-axis reactance
is given in p.u. and the maximum voltage factor is assumed to be
.
The total load active power
PL is used for the calculation to take into account that not all generating plants provide inertial behavior.
,
,
,
are the number of SGs in the overlying grid as well as the inertia constant, the governor gain, the installed active, and the apparent power of the
i-th generator. For the parameter derivation, typical machine parameters and power system characteristics are used based on [
1,
5,
22,
23]. The aggregate parameters are given in
Table 2. The detailed model parameters are given in
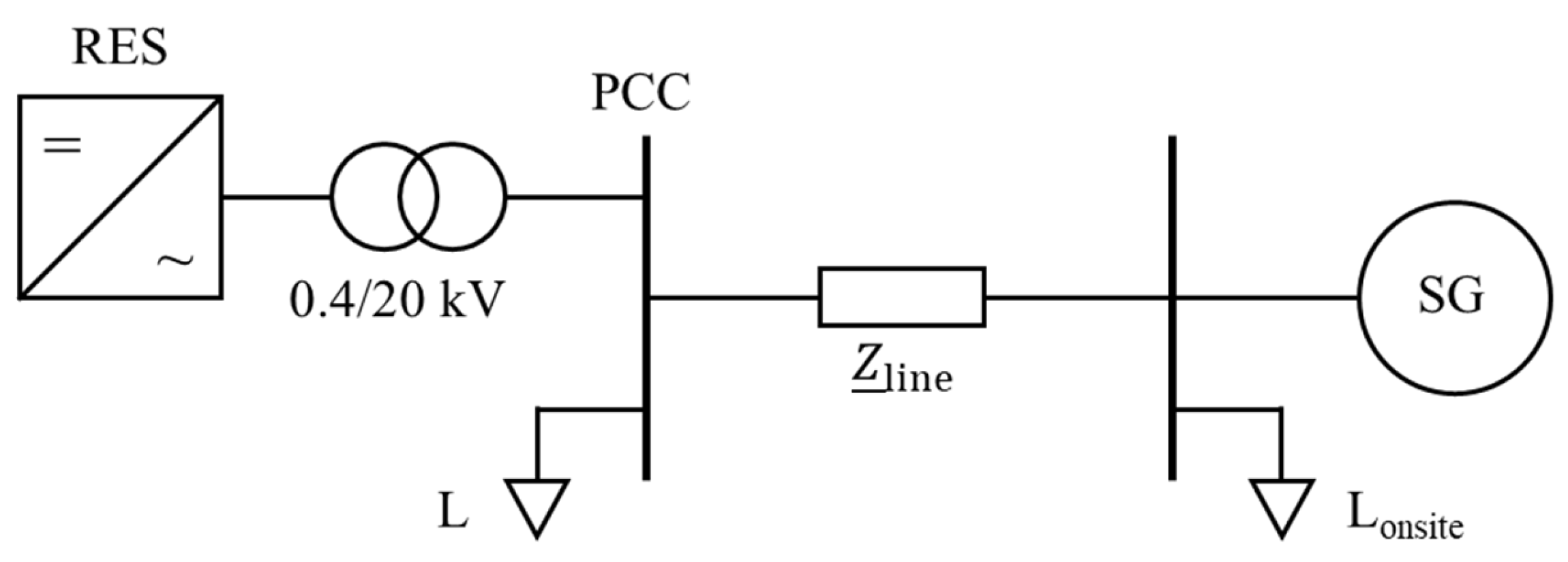
Appendix A. The onsite load of the aggregated SG is assumed to be 10% of the installed power. In the following sections, the index agg is replaced by SG in order to name the components according to
Figure 8.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















