
Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording





Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Contributions
- We developed an ensemble-based speaker identification system to overcome the challenge of voice spoofing.
- We proposed an event recording system for the identified speakers to enable proactive forensics research.
- We developed an accident monitoring and recording algorithm that allows witnesses and accident vehicles to vote on the conditions of the accident and provide verifiable claims for liability.
- We conducted extensive experiments to show some proof for the proposed solutions.
2. Related Works
2.1. Speaker Identification
2.2. Voice Spoofing
2.3. Safety and Accountability of AVs
2.4. Blockchain Solutions for AVs
3. Methodology
3.1. Vehicular Network
- We consider a cellular vehicular network with blockchain integration, where vehicles within a cell share a standard blockchain for secure and transparent data management.
- We assume the identification of the network and AVs through GPS longitudes, ensuring precise location-based tracking and communication.
- We posit that all AVs have registered license plates with the Department of Motor Vehicles (DMV), enabling regulatory compliance and traceability.
3.2. Ensemble Model for Anti-Spoofing
3.2.1. Problem Formulation
3.2.2. Feature Extraction
- Mel Frequency Cepstral Coefficients (MFCCs): MFCCs are critical features for ASI tasks. They are extracted through a cepstral analysis of the speech signal. The cepstral analysis of a speech signal separates the source components into excitation source and vocal tract source. To compute the MFCC, the speech signal is first framed and windowed, after which the Fourier transform of the output is taken to obtain the magnitude spectrum. In this paper, the hamming window (w) was used, and the following formula gives the hamming coefficients:where n represents the length of the filter andThis resultant spectrum is then transformed to the Mel scale using the Mel filterbanks, a non-linear scale that closely approximates the pitch to how it sounds to humans. The result is a spectrum in different frequency bands.
- Gammatone Cepstral Coefficients (GTCCs): The gamma tone (GT) filter banks are an improvement over Mel scale triangular filters. The GT filter is a linear filter that is represented by an impulse response given by:where represents the phase of the carrier in and f denotes the center frequency in Hz, n is the order of the filter, a is the amplitude, t is the time, and b is the bandwidth of the filter in Hz.
- Pitch: Speech can be tonal or non-tonal, voiced or unvoiced. Such classes are brought about by the modulation of air from the lungs; the sound that ensues oscillates with a reasonably low frequency, representing the pitch when the speech is voiced. The excitation produced by voiced speeches is quasiperiodic. However, when speech is unvoiced, the excitation is noise-like because, as the air from the lungs is constricted in the vocal tracts, it becomes turbulent. Pitch can be generated by first applying a pre-emphasis filter to the speech signal, which would enhance the high-frequency content of the signal. Afterward, the output signal is divided into overlapping frames of about 20 to 30 ms. Afterward, a pitch detection algorithm like cepstrum or autocorrelation is applied to each frame to obtain the pitch period.
- Short-term Energy (STE): The short-time energy is a feature that helps to differentiate speech from silence. When the energy of a frame falls below a certain predefined threshold, the frame is declared to be silent. Otherwise, it is a speech. The short-term energy can be obtained by first converting the speech signal to a discrete-time signal, after sampling at a high rate (16 kHz), then breaking these signals into overlapping frames with fixed length (20 ms with a 10 ms overlap). Afterward, square each speech sample in a frame and sum the squares. This sum is then divided by the total number of samples in a frame to obtain the short-term energy.
3.2.3. Zero-Crossing Rate (ZCR)
- GTCC features: The GTCC features were extracted using a Hamming window of length and an overlap length of .
- MFCC features: The MFCC features were extracted using a Hamming window of length and an overlap length of .
- GTCC-Pitch features: This hybrid feature consists of the GTCC, pitch, short-time energy, and features. The MFCC features were extracted using a Hamming window of length and an overlap length of . The short-time energy features were extracted with a threshold of , while the features were extracted with a threshold of .
- MFCC-Pitch features: This hybrid feature consists of the MFCC, pitch, short-time energy, and features. The MFCC features were extracted using a Hamming window of length and an overlap length of . The energy features were extracted with a threshold of , while the features were extracted with a threshold of .
- GTCC-MFCC-Pitch features: This hybrid feature comprised GTCC, MFCC, and Pitch features along with the and energy features.
3.2.4. Feature Fusion and Selection
- Normalization: To prevent bias in the classifier, all features were normalized by deducting the mean and dividing by the standard deviation, thus ensuring they were all on the same scale.
- Concatenation: All feature vectors were concatenated, and the output is a matrix, which serves as an input to a K-nearest neighbor (KNN) classifier. In this matrix, each of the columns matches a particular feature.
3.2.5. ML Model Selection
- K-Nearest Neighbors (KNN): KNN is a simple yet effective algorithm that classifies data points based on the majority class among their nearest neighbors. It is known for its simplicity and ease of implementation.
- Support Vector Machine (SVM): SVM is a robust classifier that aims to find a hyperplane that best separates data points of different classes. It is particularly effective in high-dimensional spaces where the data are not linearly separable.
- Random Forest (RF): RF is an ensemble learning method that combines multiple decision trees to improve accuracy and reduce overfitting. It is robust and performs well on a variety of data types.
- Naive Bayes (NB): NB is a probabilistic classifier based on Bayes’ theorem. It is simple, efficient, and works well for tasks where the independence assumption holds.
- Decision Tree (DT): DT is a tree-like structure where internal nodes represent features, branches represent decisions, and leaf nodes represent outcomes. It is interpretable and can handle both categorical and numerical data.
- AdaBoost: AdaBoost is an ensemble learning method combining weak and robust learners. It focuses on samples misclassified by previous weak classifiers, improving overall performance.
- AdaBoost with Decision Tree: This is an extension of AdaBoost where decision trees are used as weak learners. It often performs well when combined with AdaBoost’s boosting mechanism.
- Linear Discriminant Analysis (LDA): LDA is a dimensionality reduction and classification technique that aims to find linear combinations of features that best separate different classes.
- Quadratic Discriminant Analysis (QDA): QDA is similar to LDA but relaxes the assumption of equal covariance matrices for different classes, making it more flexible when the covariance structures vary significantly.
3.2.6. Ensemble Model Selection
3.2.7. Dataset
3.3. Event Recording with Blockchain
3.3.1. Accident Monitoring Algorithm
| Algorithm 1 Excessive Speed Detection with Weighted Votes |
|
3.3.2. AV Incident Lifecycle
- One or more users, in AV, , issue instructions to control the AV.
- executes the instruction and identifies the speaker for every executed instruction.
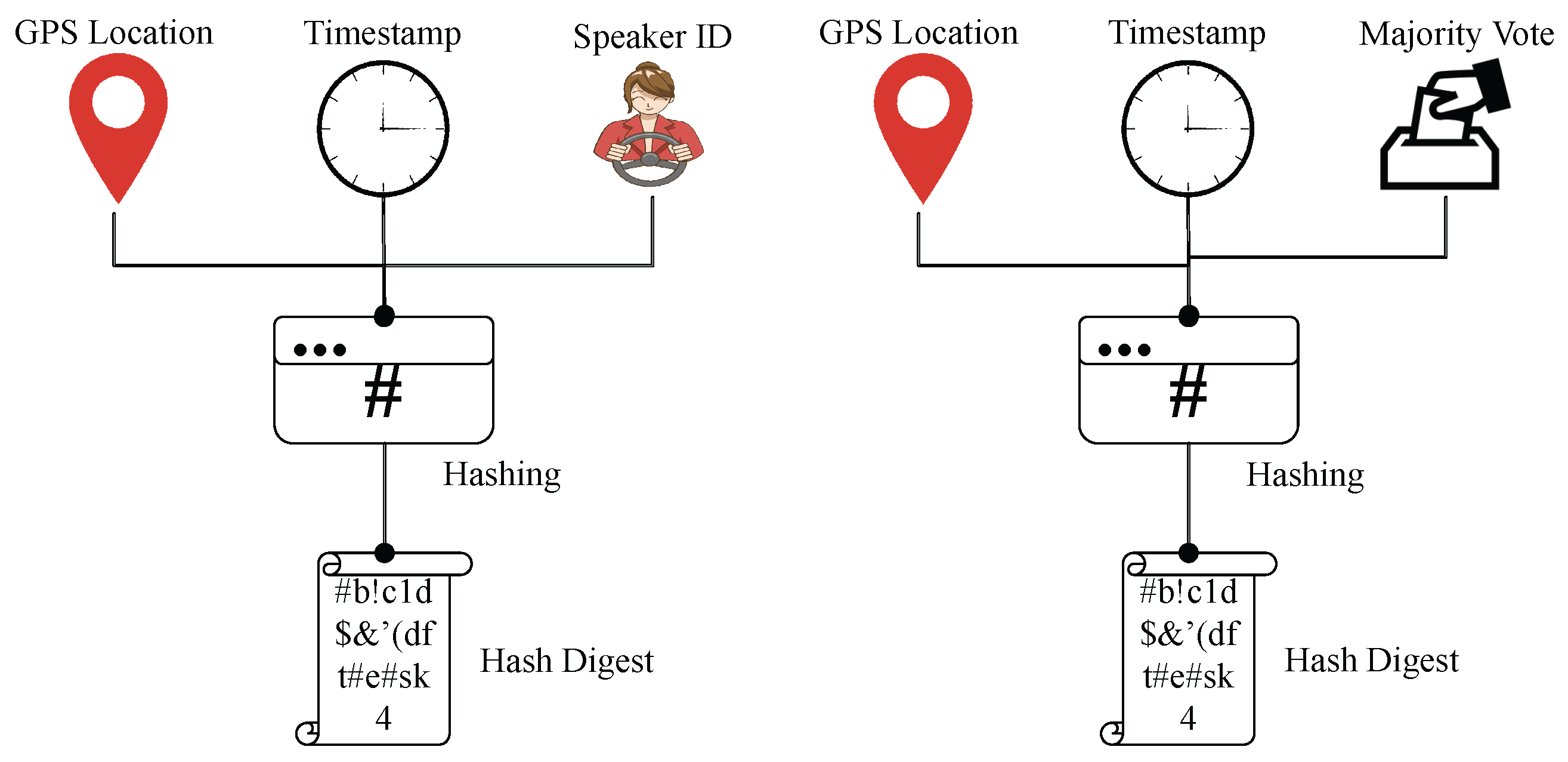
- records the predicted and identified user ID in a hash along with time stamps and location, as illustrated in Figure 7.
- Two randomly selected AVs, and , collide in an accident and broadcast ’event generation’ requests to the witness vehicles.
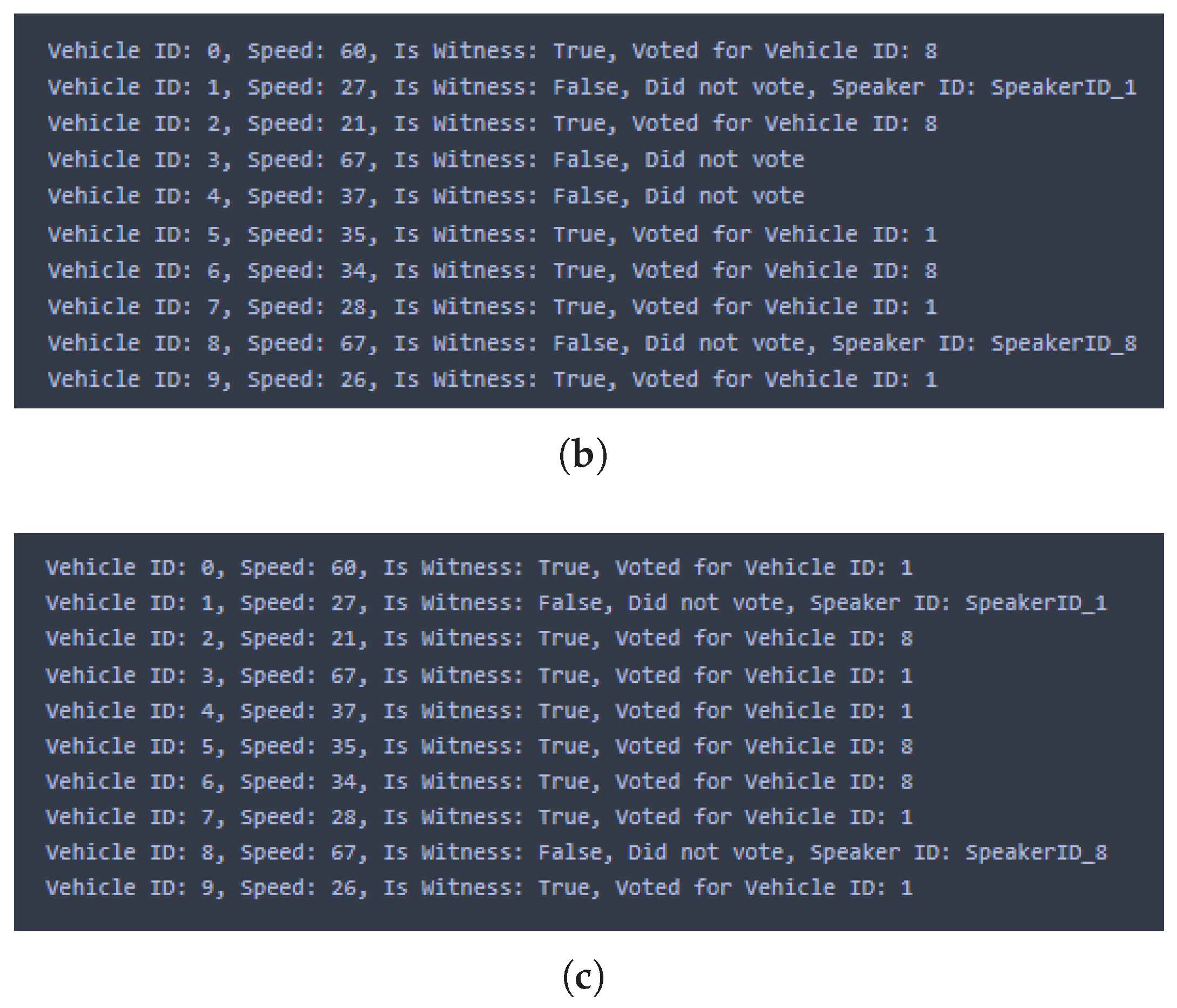
- All witness vehicles cast a vote to determine which vehicle was at fault based on excessive speed detection Algorithm 1. The weight of each vote () is determined by the inverse of the distance () between the witness vehicle and the accident site:
- AVs and also vote to determine the cause of the accident. Similarly, the weight of each vote is based on the inverse of the distance ( and ) of the respective AVs to the accident site:
- All votes are collated and aggregated by majority voting with weighted votes, where the weight of each vote () is taken into account:where is the final verdict regarding the accident’s cause, selects the class label j with the highest total weighted votes, and is a function that equals 1 if matches class label j, and 0 otherwise.
- The final vote is recorded in a hash, along with time stamps and location, as illustrated in Figure 7.
- The forensics investigator queries the blockchain records with the specific date of the accident.
- Investigator examines final vote from accident session.
- Investigator examines records from driving session.
3.3.3. Blockchain Solution
- Connection with Ethereum node: To connect with the Ethereum node, Web3.py library is used. This Python library is used to interface with the Ethereum blockchain. An HTTP provider is used to connect to a local Ethereum node using its URL, for instance: web3 = Web3(Web3.HTTPProvider(‘http://127.0.0.1:8545’)).
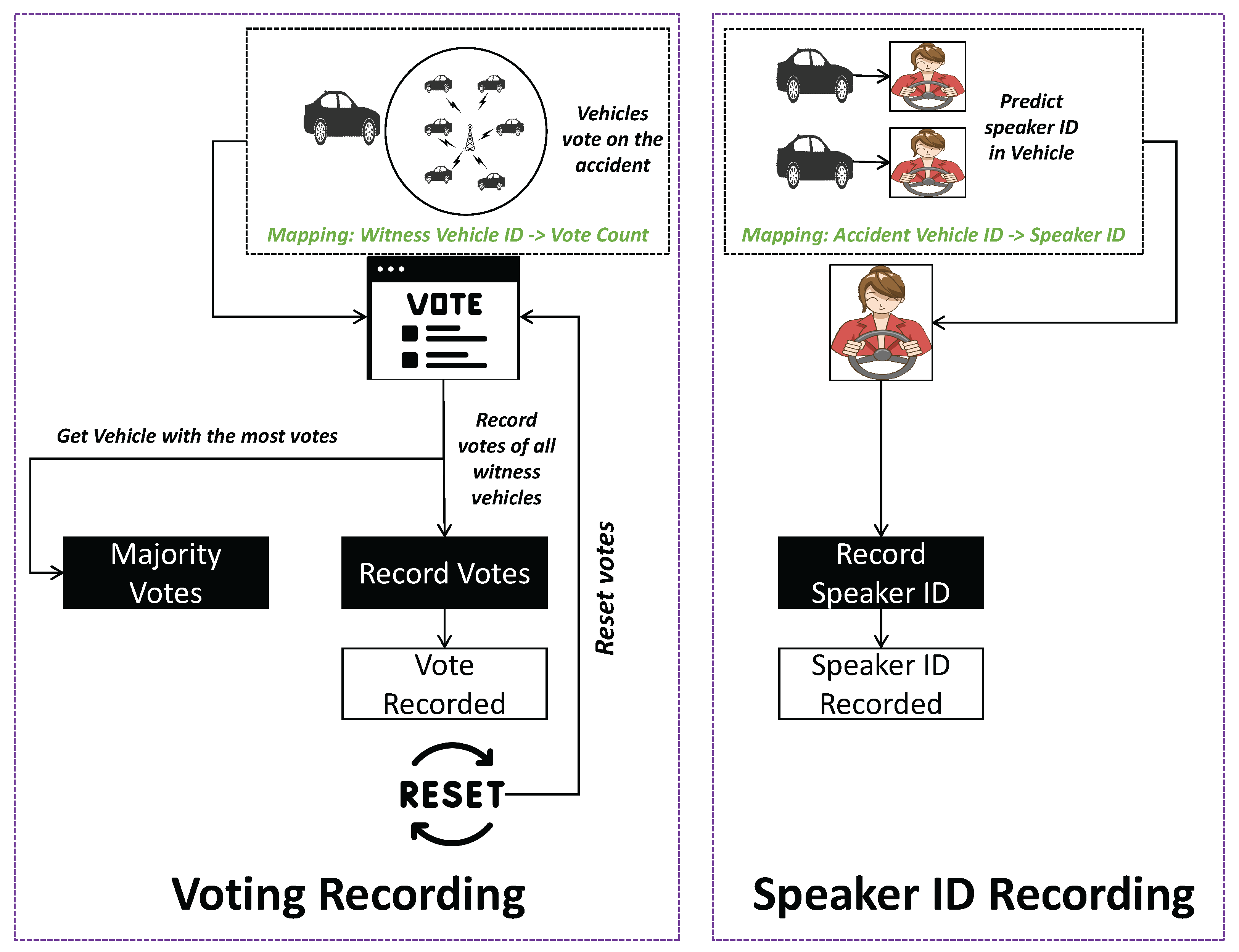
- Developing the smart contract: A smart contract is a set of predefined rules and functions written in a programming language (like Solidity for Ethereum) that runs on the blockchain [54]. It automatically executes and enforces the terms of a contract when certain conditions are met. This study uses a smart contract on the Ethereum blockchain to record AV accident data. Each AV is equipped with a unique identifier, and in the event of an accident, the vehicle’s system records key data, such as the time, location, and relevant sensor information. These data are then transmitted to the blockchain via a smart contract function executed from a decentralized application (DApp). The transaction includes the vehicle’s ID and a unique speaker ID for the accident. The smart contract ensures that each accident record is unique to prevent duplicate entries. The system records the transaction time, allowing for the calculation of latency—the time taken for the data to be recorded on the blockchain after the accident. As illustrated in Figure 9, each vehicle in the network and within proximity of the accident votes on the liable vehicle in the accident. The smart contract executes two contracts: recording accident votes and speaker ID. Within this smart contract, a function is defined to handle the recording of AV accident data. This function takes specific parameters , , time, and location and records them on the blockchain. The data are stored to align with blockchain principles, making them immutable and transparent. The function runs validation checks to ensure a speaker ID has not yet been recorded for a given vehicle. If all checks pass, the function records the data on the blockchain. This may involve updating a mapping or array within the smart contract to store the new data. The function then emits an event to notify the system that a new record has been added.
- Formal verification of the smart contract: To guarantee the robustness and accuracy of our smart contract, we utilized formal verification and analysis techniques in conjunction with IDE and . Formal verification within Remix entails meticulously examining the smart contract code to ensure its conformance with its specifications [55]. This process is essential in detecting potential vulnerabilities, logical errors, and inefficiencies. Remix also provides integrated testing and debugging tools, allowing developers to interactively test their contracts and pinpoint specific code segments where issues may arise [56]. is a linter offering security and style guide validations for Solidity code. It is critical in enhancing code quality and ensuring adherence to best practices. By employing Solhint, the smart contract code was scanned for known vulnerabilities and anti-patterns. This is crucial in the blockchain domain, where security breaches can lead to significant financial and reputational losses. also ensures that the smart contract adheres to established coding standards, which are vital for maintaining the code’s readability, consistency, and maintainability, especially in collaborative development environments. The integration of and provided a comprehensive analysis workflow. allowed for real-time interaction with the smart contract, while offered an automated, rule-based analysis. The formal verification and analysis using and were instrumental in ensuring the integrity and security of the smart contract utilized for recording AV accident data. This rigorous approach to smart contract development not only improved the reliability of the application but also instilled confidence in its usage for sensitive data handling in AV accident scenarios.
- Executing the smart contract: The smart contract’s address and application binary interface (ABI) are required to interact with it. The ABI is a JSON representation of the contract, which tells the Web3.py library how to interact with the contract’s functions. A transaction is built and then sent to the Ethereum network. This involves specifying the sender’s address (from), the nonce (a counter to ensure each transaction is unique), and gas price. The transaction is then signed using the sender’s private key. Keeping the private key secure is crucial, as it grants control over the sender’s funds and the ability to execute transactions. The signed transaction is sent to the network, and its hash is returned. This hash uniquely identifies the transaction on the blockchain. The code waits for the transaction to be mined and confirmed by the network, after which a receipt is received. This receipt contains details about the transaction, such as its success or failure, gas used, and the event logs, if any.
- Interacting with the smart contract: To identify the AV at fault or the speaker ID, it is necessary to query the smart contract. A function communicates with the smart contract to retrieve the vehicle ID count of votes. To measure the efficiency of this interaction, the function records the start and end times of the call, computing the latency as the difference between these timestamps. Similarly, another function is designed to retrieve the speaker ID associated with a specific vehicle ID.
4. Experiments and Evaluation
4.1. Metrics
4.1.1. Speaker Identification Metrics
4.1.2. Blockchain-Based Event Recording Metrics
- Latency: In blockchain terms, latency refers to the time taken for a transaction to be completed and confirmed on the blockchain network. It is the duration from when a transaction is initiated (sent to the network) to when it is confirmed (included in a block and validated by the network).where L is the latency, and is the timestamp when the transaction is confirmed. is the timestamp for initiating the transaction.
- Gas Cost: Gas cost in Ethereum and similar blockchains refers to the fee required to conduct a transaction or execute a smart contract on the network. Gas is a unit that measures the computational effort required to execute operations.G is the total gas cost, and Gas Used is the number of gas units the transaction consumes. Gas Price is the price per gas unit, typically denoted in Gwei (1 Gwei = Ether).
4.2. Simulation Details
4.2.1. Speaker Identification Models
4.2.2. Ensemble Model Reproduction and Accident Simulation
4.2.3. Blockchain Simulation and Smart Contract Development
4.3. Feature and Model Selection Results
4.4. Ensemble Model Results
4.5. Accident Simulation and Event Recording Results
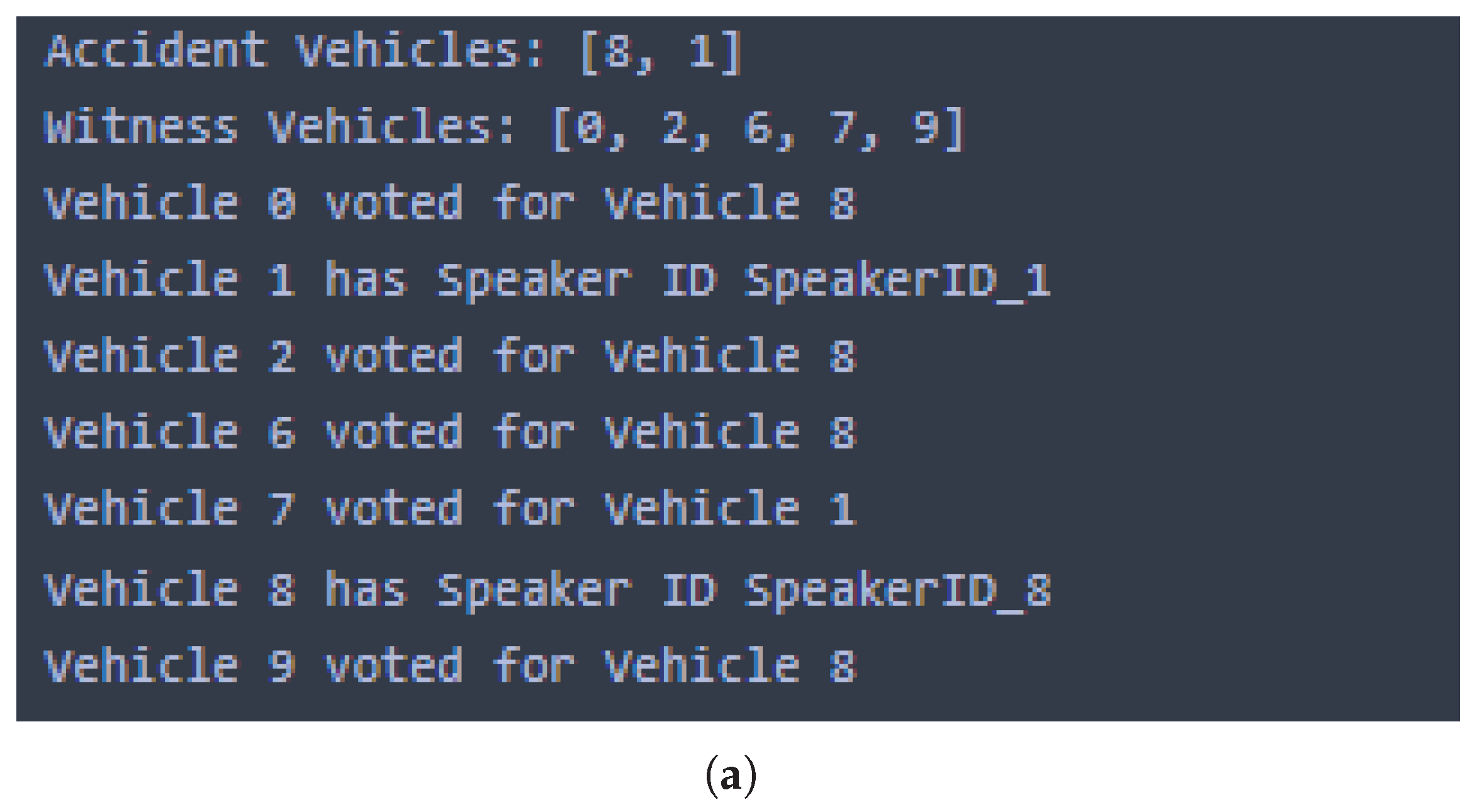
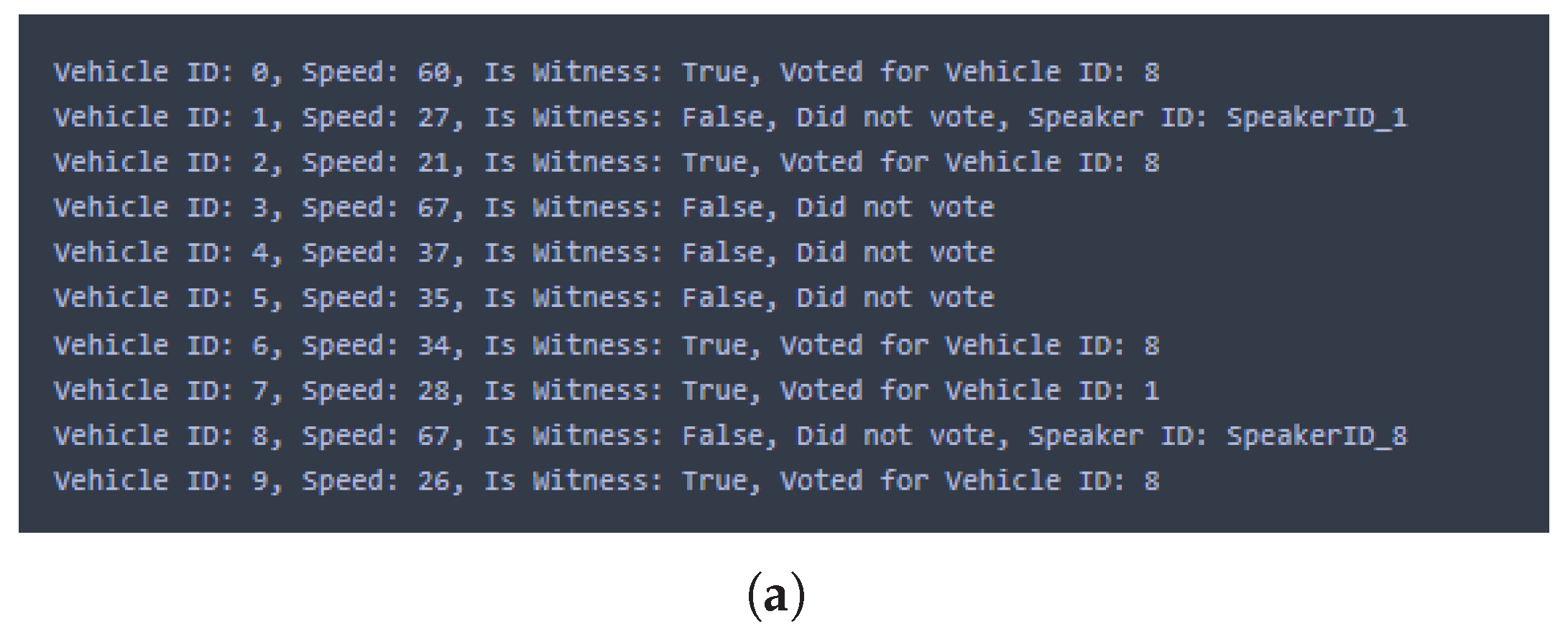
4.5.1. Accident Simulation
4.5.2. Event Recording
4.6. Query Results
5. Discussion and Potential Challenges
5.1. Utility and Applicability
5.2. Legal and Ethical Considerations
5.3. Insurance Implications
5.4. Technological Advancements and Future Directions
5.5. Challenges and Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Meaning |
| ABI | Application Binary Interface |
| ANN | Artificial Neural Network |
| AVs | Autonomous Vehicles |
| DApp | Decentralized Application |
| DMV | Department of Motor Vehicles |
| DSRCs | Dedicated Short-Range Communications |
| DT | Decision Tree |
| EDRs | Event Data Recorder |
| GT | Gamma Tone |
| GTCCs | Gamma Tone Cepstral Coefficients |
| IDE | Integrated Development Environment |
| KNN | K Nearest Neighbor |
| LDA | Linear Discriminant Analysis |
| MFCCs | Mel Frequency Cepstral Coefficients |
| ML | Machine Learning |
| NB | Naive Bayes |
| NHTSA | National Highway Traffic and Safety Administration |
| QDA | Quadratic Discriminant Analysis |
| RF | Random Forest |
| STE | Short-term Energy |
| SVMs | Support Vector Machines |
| ZCR | Zero-Crossing Rate |
References
- Njoku, J.N.; Nwakanma, C.I.; Kim, D.S. Evaluation of Spectrograms for Keyword Spotting in Control of Autonomous Vehicles for The Metaverse. In Proceedings of the Conference of the Korean Institute of Communications and Information Sciences (KICS), Seoul, Republic of Korea, 20–25 May 2022; Volume 78, pp. 1777–1778. [Google Scholar]
- Njoku, J.N.; Anyanwu, G.O.; Igboanusi, I.S.; Nwakanma, C.I.; Lee, J.M.; Kim, D.S. State-of-the-Art Object Detectors for Vehicle, Pedestrian, and Traffic Sign Detection for Smart Parking Systems. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 1585–1590. [Google Scholar] [CrossRef]
- Rajabli, N.; Flammini, F.; Nardone, R.; Vittorini, V. Software Verification and Validation of Safe Autonomous Cars: A Systematic Literature Review. IEEE Access 2021, 9, 4797–4819. [Google Scholar] [CrossRef]
- Halsey, A., III; Laris, M. Blind Man Sets Out Alone in Google’s Driverless Car; The Washington Post: Washington, DC, USA, 2016. [Google Scholar]
- Pitts, W. 12 Self-Driving Cars Crashed in Arizona in the Last Year; 12News: Phoenix, AZ, USA, 2022. [Google Scholar]
- Lee, D. Google Self-Driving Car Hits a Bus; BBC: London, UK, 2016. [Google Scholar]
- Bevilacqua, M. Cyclist Killed by Tesla Car with Self-Driving Features; The Bicycling: London, UK, 2017. [Google Scholar]
- Chougule, A.; Chamola, V.; Sam, A.; Yu, F.R.; Sikdar, B. A Comprehensive Review on Limitations of Autonomous Driving and its Impact on Accidents and Collisions. IEEE Open J. Veh. Technol. 2023, 1–20. [Google Scholar] [CrossRef]
- Penmetsa, P.; Sheinidashtegol, P.; Musaev, A.; Adanu, E.K.; Hudnall, M. Effects of the autonomous vehicle crashes on public perception of the technology. IATSS Res. 2021, 45, 485–492. [Google Scholar] [CrossRef]
- Oham, C.; Michelin, R.A.; Jurdak, R.; Kanhere, S.S.; Jha, S. WIDE: A witness-based data priority mechanism for vehicular forensics. Blockchain Res. Appl. 2022, 3, 100050. [Google Scholar] [CrossRef]
- Nasr, M.A.; Abd-Elnaby, M.; El-Fishawy, A.S.; El-Rabaie, S.; Abd El-Samie, F.E. Speaker identification based on normalized pitch frequency and Mel Frequency Cepstral Coefficients. Int. J. Speech Technol. 2018, 21, 941–951. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, D. Analyzing noise robustness of MFCC and GFCC features in speaker identification. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 7204–7208. [Google Scholar] [CrossRef]
- Ayoub, B.; Jamal, K.; Arsalane, Z. Gammatone frequency cepstral coefficients for speaker identification over VoIP networks. In Proceedings of the 2016 International Conference on Information Technology for Organizations Development (IT4OD), Fez, Morocco, 30 March–1 April 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Leu, F.Y.; Lin, G.L. An MFCC-Based Speaker Identification System. In Proceedings of the 2017 IEEE 31st International Conference on Advanced Information Networking and Applications (AINA), Taipei, Taiwan, 27–29 March 2017; pp. 1055–1062. [Google Scholar] [CrossRef]
- Totakura, V.; Vuribindi, B.R.; Reddy, E.M. Improved Safety of Self-Driving Car using Voice Recognition through CNN. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1022, 012079. [Google Scholar] [CrossRef]
- Guo, H.; Meamari, E.; Shen, C.C. Blockchain-inspired Event Recording System for Autonomous Vehicles. In Proceedings of the 2018 1st IEEE International Conference on Hot Information-Centric Networking (HotICN), Shenzhen, China, 15–17 August 2018; pp. 218–222. [Google Scholar] [CrossRef]
- Sun, S.; Tang, H.; Du, R. A Novel Blockchain-Based IoT Data Provenance Model. In Proceedings of the 2022 2nd International Conference on Computer Science and Blockchain (CCSB), Wuhan, China, 28–30 October 2022; pp. 46–52. [Google Scholar] [CrossRef]
- Rewatkar, H.R.; Agarwal, D.; Khandelwal, A.; Upadhyay, S. Decentralized Voting Application Using Blockchain. In Proceedings of the 2021 10th IEEE International Conference on Communication Systems and Network Technologies (CSNT), Bhopal, India, 18–19 June 2021; pp. 735–739. [Google Scholar] [CrossRef]
- Ahamed, N.N.; Vignesh, R. A Build and Deploy Ethereum Smart Contract for Food Supply Chain Management in Truffle—Ganache Framework. In Proceedings of the 2023 9th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 17–18 March 2023; Volume 1, pp. 36–40. [Google Scholar] [CrossRef]
- Sharan, R.V.; Abeyratne, U.R.; Swarnkar, V.R.; Porter, P. Automatic Croup Diagnosis Using Cough Sound Recognition. IEEE Trans. Biomed. Eng. 2019, 66, 485–495. [Google Scholar] [CrossRef]
- Jahangir, R.; Teh, Y.W.; Nweke, H.F.; Mujtaba, G.; Al-Garadi, M.A.; Ali, I. Speaker identification through artificial intelligence techniques: A comprehensive review and research challenges. Expert Syst. Appl. 2021, 171, 114591. [Google Scholar] [CrossRef]
- Sardar, V.M.; Shirbahadurkar, S.D. Speaker identification of whispering speech: An investigation on selected timbrel features and KNN distance measures. Int. J. Speech Technol. 2021, 21, 545–553. [Google Scholar] [CrossRef]
- Guglani, J.; Mishra, A. Automatic speech recognition system with pitch dependent features for Punjabi language on KALDI toolkit. Appl. Acoust. 2020, 167, 107386. [Google Scholar] [CrossRef]
- Marques, I.; Sousa, J.; Sá, B.; Costa, D.; Sousa, P.; Pereira, S.; Santos, A.; Lima, C.; Hammerschmidt, N.; Pinto, S.; et al. Microphone Array for Speaker Localization and Identification in Shared Autonomous Vehicles. Electronics 2022, 11, 766. [Google Scholar] [CrossRef]
- Njoku, J.N.; Nwakanma, C.I.; Lee, J.-M.; Kim, D.S. Multi-Feature Concatenation for Speech Dependent Automatic Speaker Identification in Maritime Autonomous Vehicles. In Proceedings of the 2nd International Conference on Maritime IT Convergence (ICMIC 2023), Jeju Island, Republic of Korea, 23–25 August 2023; Volume 2, pp. 103–106. [Google Scholar]
- Pfalzgraf, A.M.; Sullivan, C.; Sánchez, D.S. Autonomous Vehicle Speaker Verification System; Bradley University: Peoria, IL, USA, 2014. [Google Scholar]
- Sardar, V.M.; Shirbahadurkar, S.D. Timbre features for speaker identification of whispering speech: Selection of optimal audio descriptors. Int. J. Comput. Appl. 2019, 43, 1047–1053. [Google Scholar] [CrossRef]
- Soleymanpour, M.; Marvi, H. Text-independent speaker identification based on selection of the most similar feature vectors. Int. J. Speech Technol. 2017, 20, 99–108. [Google Scholar] [CrossRef]
- Valero, X.; Alias, F. Gammatone Cepstral Coefficients: Biologically Inspired Features for Non-Speech Audio Classification. IEEE Trans. Multimed. 2012, 14, 1684–1689. [Google Scholar] [CrossRef]
- Ren, Y.; Peng, H.; Li, L.; Xue, X.; Lan, Y.; Yang, Y. Generalized Voice Spoofing Detection via Integral Knowledge Amalgamation. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 2461–2475. [Google Scholar] [CrossRef]
- Khan, A.; Malik, K.M.; Ryan, J.; Saravanan, M. Battling voice spoofing: A review, comparative analysis, and generalizability evaluation of state-of-the-art voice spoofing counter measures. Artif. Intell. Rev. 2023, 56, 513–566. [Google Scholar] [CrossRef]
- Ding, Y.Y.; Zhang, J.X.; Liu, L.J.; Jiang, Y.; Hu, Y.; Ling, Z.H. Adversarial Post-Processing of Voice Conversion against Spoofing Detection. In Proceedings of the 2020 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Auckland, New Zealand, 7–10 December 2020; pp. 556–560. [Google Scholar]
- Hemavathi, R.; Kumaraswamy, R. Voice conversion spoofing detection by exploring artifacts estimates. Multimed. Tools Appl. 2021, 80, 23561–23580. [Google Scholar] [CrossRef]
- Muttathu Sivasankara Pillai, A.S.; L. De Leon, P.; Roedig, U. Detection of Voice Conversion Spoofing Attacks Using Voiced Speech. In Secure IT Systems; Reiser, H.P., Kyas, M., Eds.; Springer: Cham, Switzerland, 2022; pp. 159–175. [Google Scholar]
- Javed, A.; Malik, K.M.; Malik, H.; Irtaza, A. Voice spoofing detector: A unified anti-spoofing framework. Expert Syst. Appl. 2022, 198, 116770. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, F.; Duan, Z. One-Class Learning Towards Synthetic Voice Spoofing Detection. IEEE Signal Process. Lett. 2021, 28, 937–941. [Google Scholar] [CrossRef]
- Chettri, B.; Stoller, D.; Morfi, V.; Ramírez, M.A.M.; Benetos, E.; Sturm, B.L. Ensemble Models for Spoofing Detection in Automatic Speaker Verification. arXiv 2019, arXiv:1904.04589. [Google Scholar] [CrossRef]
- Zhou, J.; Hai, T.; Jawawi, D.N.A.; Wang, D.; Ibeke, E.; Biamba, C. Voice spoofing countermeasure for voice replay attacks using deep learning. J. Cloud Comput. 2022, 11, 51. [Google Scholar] [CrossRef]
- Monteiro, J.; Alam, J.; Falk, T.H. An Ensemble Based Approach for Generalized Detection of Spoofing Attacks to Automatic Speaker Recognizers. In Proceedings of the ICASSP 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 6599–6603. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef] [PubMed]
- Sana, F.; Azad, N.L.; Raahemifar, K. Autonomous Vehicle Decision-Making and Control in Complex and Unconventional Scenarios—A Review. Machines 2023, 11, 676. [Google Scholar] [CrossRef]
- Wäschle, M.; Thaler, F.; Berres, A.; Pölzlbauer, F.; Albers, A. A review on AI Safety in highly automated driving. Front. Artif. Intell. 2022, 5, 952773. [Google Scholar] [CrossRef] [PubMed]
- Kropka, C. “Cruise”ing for “Waymo” Lawsuits: Liability in Autonomous Vehicle Crashes; Richmond: Richmond, VA, USA, 2016. [Google Scholar]
- De Brito Gonçalves, J.P.; Spelta, G.; da Silva Villaça, R.; Gomes, R.L. IoT Data Storage on a Blockchain Using Smart Contracts and IPFS. In Proceedings of the 2022 IEEE International Conference on Blockchain (Blockchain), Espoo, Finland, 22–25 August 2022; pp. 508–511. [Google Scholar] [CrossRef]
- Rajendar, S.; Thangavel, U.; Devendran, S.; Selvi, V.; Muthumanickam, S.S. Blockchain for Securing Autonomous Vehicles. In Proceedings of the 2023 Second International Conference on Electronics and Renewable Systems (ICEARS), Tuticorin, India, 2–4 March 2023; pp. 713–717. [Google Scholar] [CrossRef]
- Aishwarya, R.; Vivek Anand, M. Blockchain Framework For Securing Autonomous Vehicles. In Proceedings of the 2023 2nd International Conference on Advancements in Electrical, Electronics, Communication, Computing and Automation (ICAECA), Coimbatore, India, 16–17 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Narbayeva, S.; Bakibayev, T.; Abeshev, K.; Makarova, I.; Shubenkova, K.; Pashkevich, A. Blockchain Technology on the Way of Autonomous Vehicles Development. Transp. Res. Procedia 2020, 44, 168–175. [Google Scholar] [CrossRef]
- Tyagi, R.; Sharma, S.; Mohan, S. Blockchain Enabled Intelligent Digital Forensics System for Autonomous Connected Vehicles. In Proceedings of the 2022 International Conference on Communication, Computing and Internet of Things (IC3IoT), Chennai, India, 10–11 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Gandhi, G.M.; Salvi. Artificial Intelligence Integrated Blockchain for Training Autonomous Cars. In Proceedings of the 2019 Fifth International Conference on Science Technology Engineering and Mathematics (ICONSTEM), Chennai, India, 14–15 March 2019; Volume 1, pp. 157–161. [Google Scholar] [CrossRef]
- Guo, H.; Li, W.; Nejad, M.; Shen, C.C. Proof-of-Event Recording System for Autonomous Vehicles: A Blockchain-Based Solution. IEEE Access 2020, 8, 182776–182786. [Google Scholar] [CrossRef]
- Kara, M.; Merzeh, H.R.; Aydın, M.A.; Balık, H.H. VoIPChain: A decentralized identity authentication in Voice over IP using Blockchain. Comput. Commun. 2023, 198, 247–261. [Google Scholar] [CrossRef]
- IEEE Std 802.11-2020; IEEE Standard for Information Technology–Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks–Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE: Piscataway, NJ, USA, 2023; pp. 1–4379. [CrossRef]
- Ardila, R.; Branson, M.; Davis, K.; Henretty, M.; Kohler, M.; Meyer, J.; Morais, R.; Saunders, L.; Tyers, F.M.; Weber, G. Common Voice: A Massively-Multilingual Speech Corpus. In Proceedings of the 12th Conference on Language Resources and Evaluation (LREC 2020), Online, 11–16 May 2020; pp. 4211–4215. [Google Scholar]
- Alnavar, K.; Babu, C. Blockchain-based Smart Contract with Machine Learning for Insurance Claim Verification. In Proceedings of the 2021 5th International Conference on Electrical, Electronics, Communication, Computer Technologies and Optimization Techniques (ICEECCOT), Mysuru, India, 10–11 December 2021; pp. 247–252. [Google Scholar] [CrossRef]
- Krichen, M.; Lahami, M.; Al-Haija, Q.A. Formal Methods for the Verification of Smart Contracts: A Review. In Proceedings of the 2022 15th International Conference on Security of Information and Networks (SIN), Sousse, Tunisia, 11–13 November 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Abdellatif, T.; Brousmiche, K.L. Formal Verification of Smart Contracts Based on Users and Blockchain Behaviors Models. In Proceedings of the 2018 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26–28 February 2018; pp. 1–5. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset/Speaker Index | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Validation data | 3094 | 1424 | 4339 | 2128 | 2661 | 2904 | 2290 | 968 | 1857 | 1456 | 23,121 |
| Test data | 756 | 441 | 1029 | 525 | 732 | 673 | 461 | 226 | 481 | 399 | 5723 |
| Total dataset | 3850 | 1835 | 5368 | 2653 | 3393 | 3577 | 2751 | 1194 | 2338 | 1855 | 28,844 |
| Metrics & Features | Score (%) | Jaccard Index | Computation Time (s) | |||
|---|---|---|---|---|---|---|
| Validation | Testing | Validation | Testing | Validation | Testing | |
| GTCC [12,13] | 96.99 | 69.29 | 0.94 | 0.56 | 0.15 | 0.251 |
| MFCC [14] | 97.66 | 81.5 | 0.95 | 0.71 | 1.56 | 0.26 |
| GTCC + Pitch + Short-term energy + ZCR | 96.82 | 71.23 | 0.94 | 0.58 | 0.18 | 0.26 |
| MFCC+ Pitch + Short-term energy + ZCR [11] | 97.73 | 82.23 | 0.96 | 0.73 | 0.44 | 0.29 |
| MFCC + GTCC + Pitch + Short-term energy + ZCR | 98.76 | 84.54 | 0.98 | 0.76 | 0.29 | 0.50 |
| Models/Metrics | Validation Accuracy (%) | Test Accuracy (%) | Test Score (%) | Jaccard Index |
|---|---|---|---|---|
| KNN | 98.82 | 85.38 | 85.38 | 72.62 |
| SVM | 93.91 | 87.16 | 87.16 | 75.04 |
| RF | 92.10 | 83.71 | 83.71 | 69.83 |
| NB | 76.57 | 74.07 | 74.07 | 58.37 |
| DT | 84.36 | 69.12 | 69.12 | 50.95 |
| Ada | 77.44 | 72.81 | 72.81 | 56.35 |
| AdaDT | 88.50 | 81.60 | 81.60 | 66.91 |
| ImpKNN | 99.17 | 84.22 | 84.22 | 70.85 |
| LDA | 84.65 | 82.62 | 82.62 | 69.65 |
| QDA | 92.60 | 86.55 | 86.55 | 74.97 |
| Ensemble Criteria | Test Accuracy (%) | Jaccard Index |
|---|---|---|
| Models Jac > 60 | 89.36 | 79.27 |
| Models Jac > 65 | 89.85 | 79.87 |
| Models Val Acc 80–90% | 84.86 | 72.52 |
| Models Val Acc > 80% | 89.58 | 79.90 |
| All Models | 88.66 | 78.41 |
| Models Val Acc > 90% | 90.07 | 80.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Njoku, J.N.; Nwakanma, C.I.; Lee, J.-M.; Kim, D.-S. Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording. Electronics 2023, 12, 4998. https://doi.org/10.3390/electronics12244998
Njoku JN, Nwakanma CI, Lee J-M, Kim D-S. Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording. Electronics. 2023; 12(24):4998. https://doi.org/10.3390/electronics12244998
Chicago/Turabian StyleNjoku, Judith Nkechinyere, Cosmas Ifeanyi Nwakanma, Jae-Min Lee, and Dong-Seong Kim. 2023. "Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording" Electronics 12, no. 24: 4998. https://doi.org/10.3390/electronics12244998
APA StyleNjoku, J. N., Nwakanma, C. I., Lee, J.-M., & Kim, D.-S. (2023). Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording. Electronics, 12(24), 4998. https://doi.org/10.3390/electronics12244998