1. Introduction
The dual three-phase permanent magnet synchronous motor (DTP-PMSM) has received significant attention from researchers in recent years due to the fault-tolerant performance of its extra winding [
1,
2,
3,
4]. Additionally, the requirement for inverter capacity is halved since the additional set of winding shares the phase currents of the motor at the same torque. As a result, DTP-PMSMs are widely used in the fields of ship propulsion, electric vehicles, and other high-power applications [
5,
6,
7].
Traditional control methods based on field-oriented control have been widely applied to three-phase motors, which effectively simplifies the motor control [
8]. However, the method cannot be directly applied to DTP-PMSM due to the presence of greater degrees of freedom. Therefore, the vector space decoupling (VSD) based theoretical method is proposed to be applied to the torque control of multiphase motors [
9]. The method transforms the six-phase current or voltage components into the electromechanical energy conversion subspace and the harmonic component subspace, respectively. The electromechanical energy subspace is used to control the output torque, while the harmonic component subspace is used to control the current harmonic components of the motor. Thereafter, four conventional proportional-integral (PI) controllers are utilized to control these two subspaces, which enable effective control of both the torque and harmonic components of the DTP-PMSM. Nevertheless, subject to the bandwidth performance of the PI controllers, it is challenging to further improve the dynamic performance for high-performance servo control applications.
Among several existing techniques, the model predictive current controller (MPCC) is a satisfactory and easy-to-implement high-performance solution [
10,
11,
12]. At each control period, MPCC predicts the current using the mathematical model of the motor in order to calculate the optimal control result; thus, the dynamic performance of the current is significantly improved. The existing literature generally categorizes MPCC as finite control set MPCC (FCS-MPCC) and continuous control set MPCC (CCS-MPCC) [
13]. The FCS-MPCC searches all available voltage vectors in the inverter and selects the optimal one to apply directly to the motor, therefore providing an adequately high bandwidth. In [
14], the authors introduced the concept of virtual vectors to realize robust FCS-MPCC. Additionally, literature [
15] presents a space vector-optimized predictive controller to deal with fast current response by presynthesizing space vectors, which improves the dynamic response performance. However, the existing FCS-MPCC needs to search a large number of available vectors, especially when dealing with multi-step prediction. Therefore, such methods usually require a great computational effort for DTP-PMSM [
16].
As another class of MPCC methods, CCS-MPCC computes the optimal voltage vector in the whole vector plane directly, avoiding the searching process and thus providing better computational efficiency [
17]. In [
18], the authors implemented a generalized CCS-MPCC to efficiently increase the torque density. In [
19], the scheme of open-switch fault is analyzed in detail, and a high control bandwidth CCS-MPCC under the fault-tolerant operation is proposed. Despite the promising results, conventional MPCC inevitably suffers from prediction errors caused by parameter uncertainties or model nonlinearities such as dead time, resulting in deteriorating performance [
20]. To address this problem, researchers have studied a number of possible approaches [
21,
22,
23,
24]. In [
21], a sliding mode observer (SMO) based MPCC is proposed to eliminate the effects of motor parameters and unmodeled dynamics. Further, one study [
22] couples an SMO with a generalized proportional-integral observer for fast-tracking of time-varying disturbances. This class of SMO-based methods has a fast disturbance tracking rate, but the chattering problem is difficult to completely eliminate. Another idea to address the prediction errors introduced by disturbances is to utilize model-free based methods [
23,
24]. This approach completely eliminates the dependence on motor parameters by using a generalized estimation method instead of using a motor model. Furthermore, in order to compensate for external disturbances, another study [
25] suggests the use of extended state observer (ESO) for the estimation of lumped disturbances. Although the robustness of MPCC is enhanced, the dynamic performance of the motor is limited due to the lack of the model.
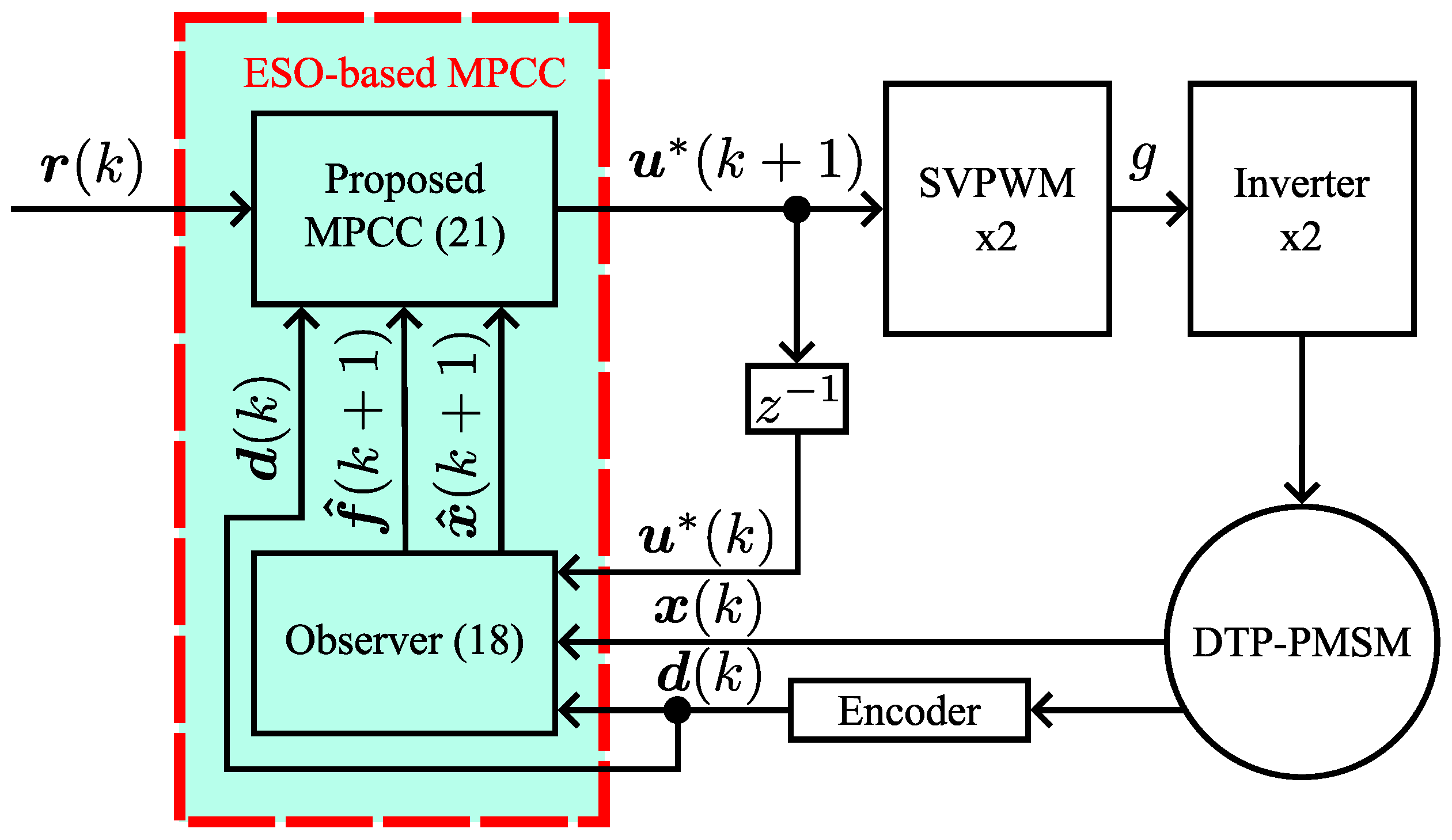
In this paper, an ESO-based robust CCS-MPCC is proposed to enhance the dynamic performance and parameter robustness of DTP-PMSM drives. The external disturbances caused by parameter uncertainties or model nonlinearities are considered as lumped disturbances, which are uniformly estimated by ESO and compensated cycle-by-cycle into MPCC, which effectively enhances the anti-disturbance performance of MPCC. The main contributions of this paper are as follows:
- (1)
The conventional DTP-PMSM mathematical model is modified to a form with disturbance term, and an observer is designed for cycle-by-cycle estimation to enhance the disturbance immunity of the controller.
- (2)
An observer-based MPCC is constructed where the prediction error of the controller is corrected and compensated by the observer in real time. Additionally, the parameter design method of the observer is given to simplify the design.
- (3)
By solving the predictive controller explicitly in the forward direction instead of iteratively, the computational resource consumption is not increased significantly considering the extra subspace of the multi-phase motor.
The rest of the paper is organized by the following structure. The mathematical model construction of DTP-PMSM is given in
Section 2. The design procedure, as well as the principle of MPCC, is shown in
Section 3. The observer compensation based MPCC, as well as the parameter design of the observer, is presented in
Section 4. Comparative experimental results are available in
Section 5. The discussion and conclusion are given in
Section 6.
2. Mathematical Modeling of the Dual Three-Phase Motor
The mathematical electrical model of dual three-phase motor in the natural coordinate system is:
where
is the motor stator voltage vector,
is denoted as the stator resistance diagonal matrix,
represents the stator current vector and
means the stator magnetic flux vector. It is quite challenging to control the motor directly using model (
1). Therefore, the VSD control strategy is employed in this paper, which significantly simplifies the difficulty of control. The VSD-based rotation matrix
is represented by:
The mathematical model of the motor is decomposed to
-
subspace and
x-
y subspace by applying the rotation matrix
to model (
1). The
-
subspace is used to control the electromechanical energy conversion, while the
x-
y subspace is used to control the harmonic components of the motor. Further, the
-
subspace is transformed to the
d-
q subspace via the Park transformation, which enables the control of the alternating current to direct current. As a result, the mathematical model of the motor is expressed as:
where
,
,
and
are denoted as voltages under the
d-,
q-,
x- and
y-axis, respectively, which are utilized to control the behavior of the motor [
];
,
,
and
are the currents under the
d-,
q-,
x- and
y-axis, respectively [
];
is denoted as the stator resistance [
];
and
are the direct and quadrature axis inductances [
];
is the leakage inductance [
];
is the motor electrical speed [
] and
is the magnetic flux of permanent magnets [
].
Expressing model (
2) as the state space expression, one can obtain the mathematical control model as follows:
where
is the state variable;
is the control effort;
is the measurable disturbance and
is the system output.
and
are given by (
4);
and
is a unit matrix.
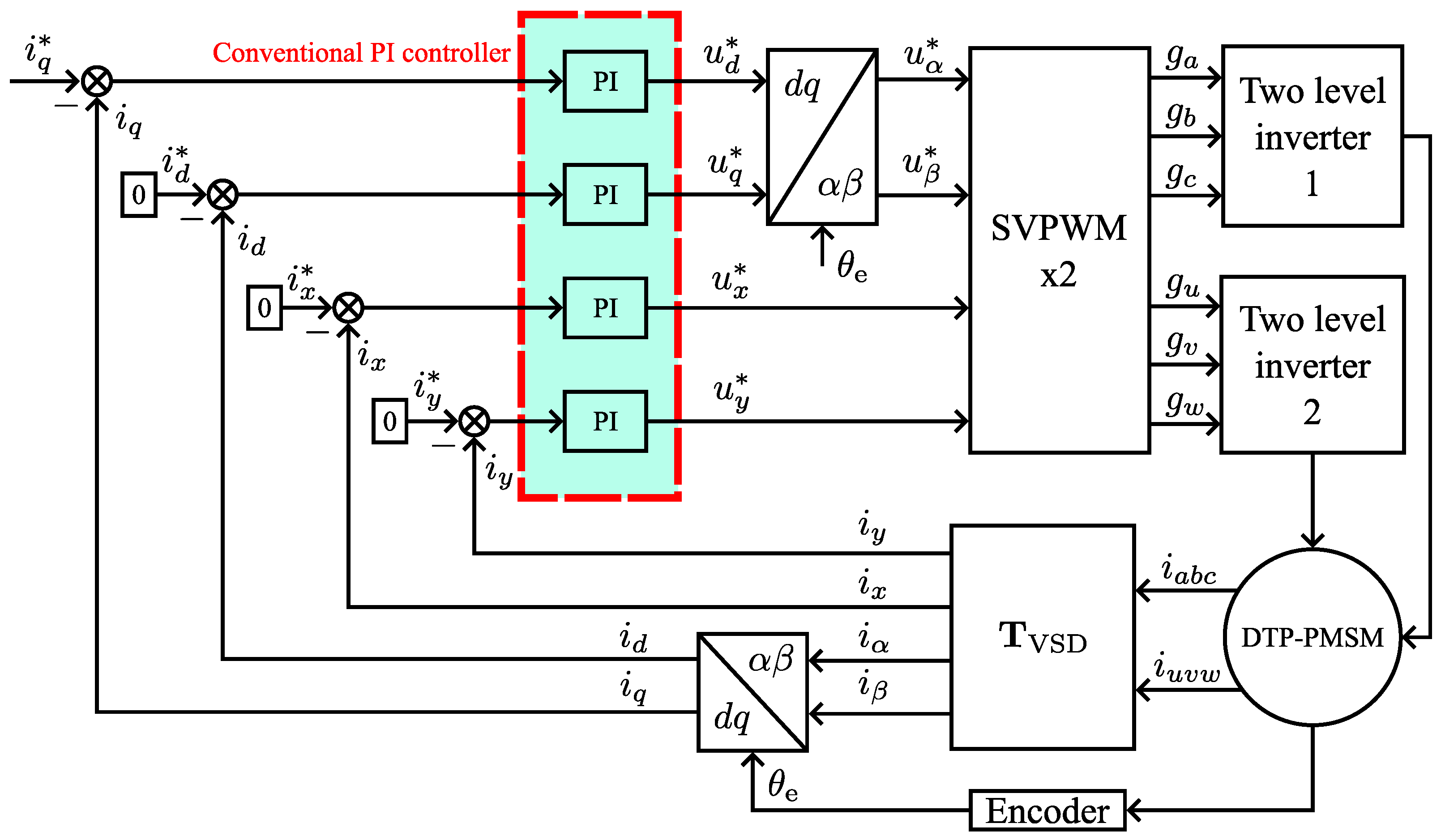
Four conventional PI controllers are then applied to control the four current components in
, thereby realizing the decoupled control of the dual three-phase motor. Therefore, the brief principle of conventional motor control is shown in
Figure 1.
3. Design of Model Predictive Current Controller
After discretizing model (
3) with the first-order Euler discretization method, the prediction model used for the controller is obtained as:
where
,
,
,
and
is sampling period or control period.
In order to achieve the tracking control of the current, the cost function at time step
k as shown in Equation (
6) is defined.
where
is the prediction horizon and
is the reference value of current;
represents the output of the system at step
k when the system is predicted to step
i;
is the weight matrix assigned to the different currents in the tracking control at the step
k of the prediction. The goal of tracking control is to control the actual current to be consistent with the reference. Therefore, when
in the cost function (
6) is smaller, it indicates that the control effort is more effective at the
kth step.
Since the electrical constant of the motor is much smaller than the mechanical constant, the measurable disturbance
, also referred as the electrical speed, remains constant during the prediction process. Thus, the assumption (
7) is satisfied in this paper.
Bringing model (
5) and assumption (
7) into
, the output of the system
during the prediction process is derived in (
8) and
is the control horizon.
The cost function can be further expanded as follows:
where
and
denotes the diagonal matrix of weighting coefficients assigned to the different current components in the tracking control at prediction step
i. Substituting (
8) into (
9),
is simplified to:
and:
By taking the partial derivative of (
10) and making it zero, the optimal control effort
at step
k is found.
Considering that only the first step control effort is applied, the control output at step
k is:
Consequently, the controller (
13) is the ideal model predictive current controller, and the optimal control output is applied to the inverter at each control cycle.
5. Experimental Results
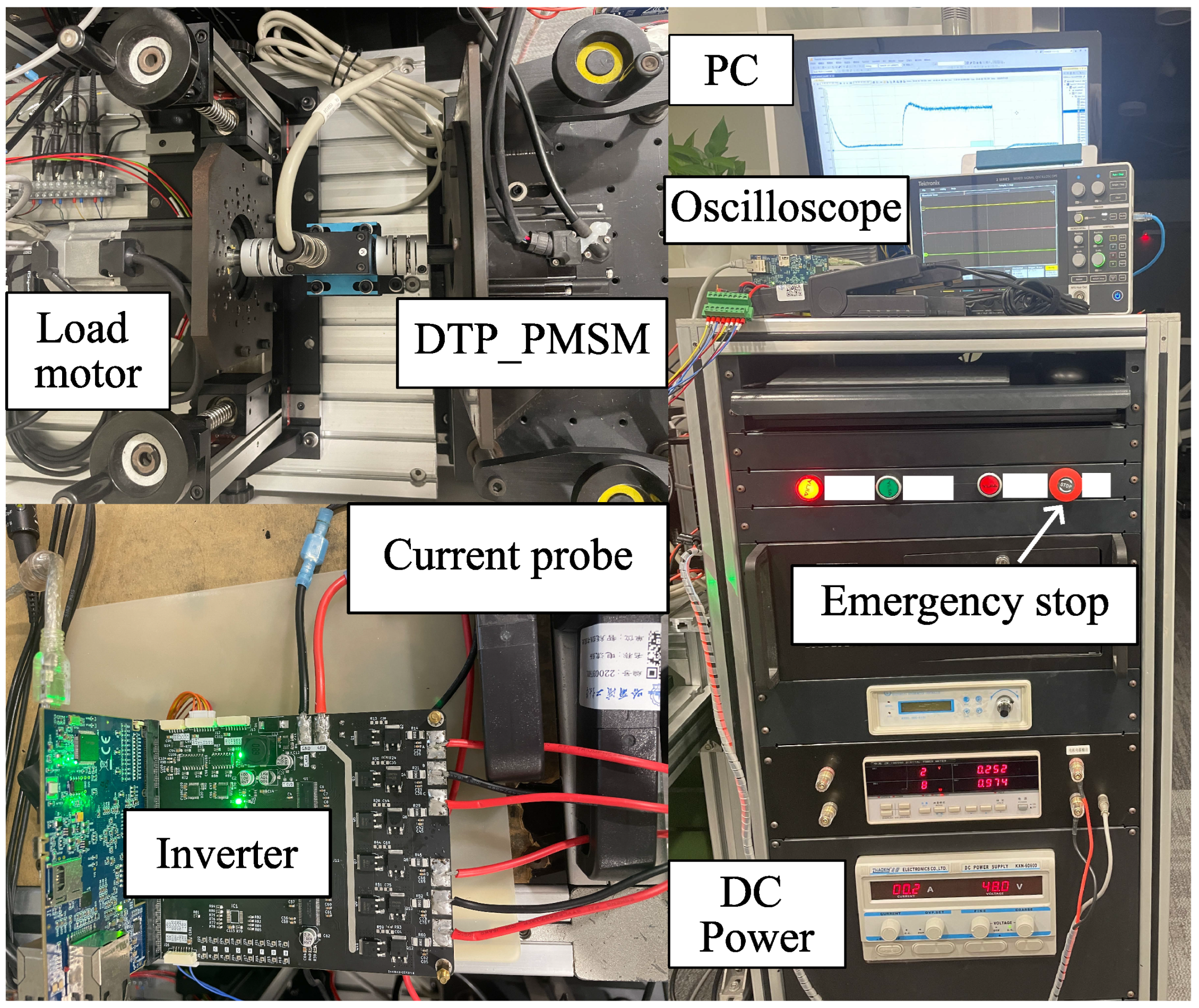
In order to verify the effectiveness of the proposed method, multiple sets of experiments are implemented. In addition, the conventional PI control method is realized for comparison of performance. The controllers are all run in the TMS320F28388D (digital signal processor) manufactured by Texas Instruments. In addition, the DTP-PMSM is mounted on the testbench, and the simulated load is provided by a load motor. The parameters of the DTP-PMSM are listed in
Table 1 and the whole experimental platform is shown in
Figure 3.
The parameters of the proposed method are listed in
Table 2. Considering the computational complexity,
and
are determined as 2 and 1, respectively, to simplify the computation. At the same time, the desired bandwidth of observer
is selected as
to satisfy the fast observation performance without signal noise amplification. In addition,
is chosen as a unit matrix due to the same importance of tracking control for different currents. Additionally, the parameters of proportional coefficient
and integral coefficient
with conventional PI control are calculated by Equation (
24), where
is the desired bandwidth.
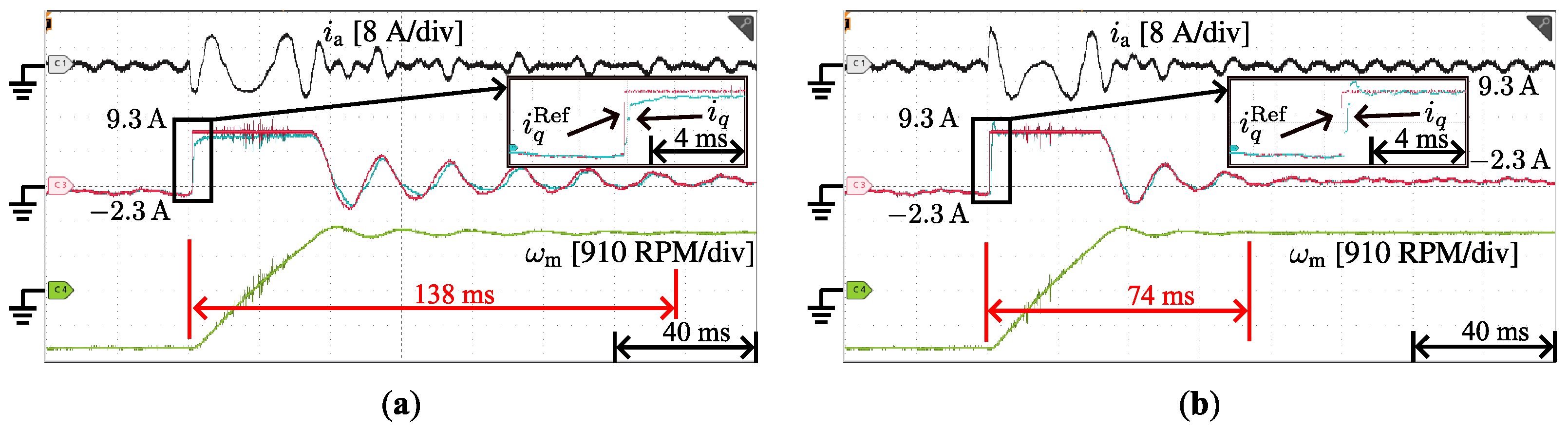
5.1. Dynamic Experimental Results with Speed Reversal
The speed reversal experiments are implemented to verify the dynamic performance of the proposed method during speed variation. The test motor is operated in speed loop, and the speed reference of the motor is changed abruptly from −1500 RPM to 1500 RPM at 40 ms.
Figure 4 presents the experimental results of the a-phase current
, the reference and actual values of the current in the q-axis, and the mechanical speed
when the motor is reversed. The figure shows that the tracking performance of the q-axis current suffers from a large latency and a steady state error when using a conventional PI controller, while the proposed method demonstrates a better satisfactory tracking performance and eliminates the steady state error. In addition, the settling time of the speed is reduced from 138 ms with the PI controller to 74 ms with the proposed method, which further validates the effectiveness of the proposed method.
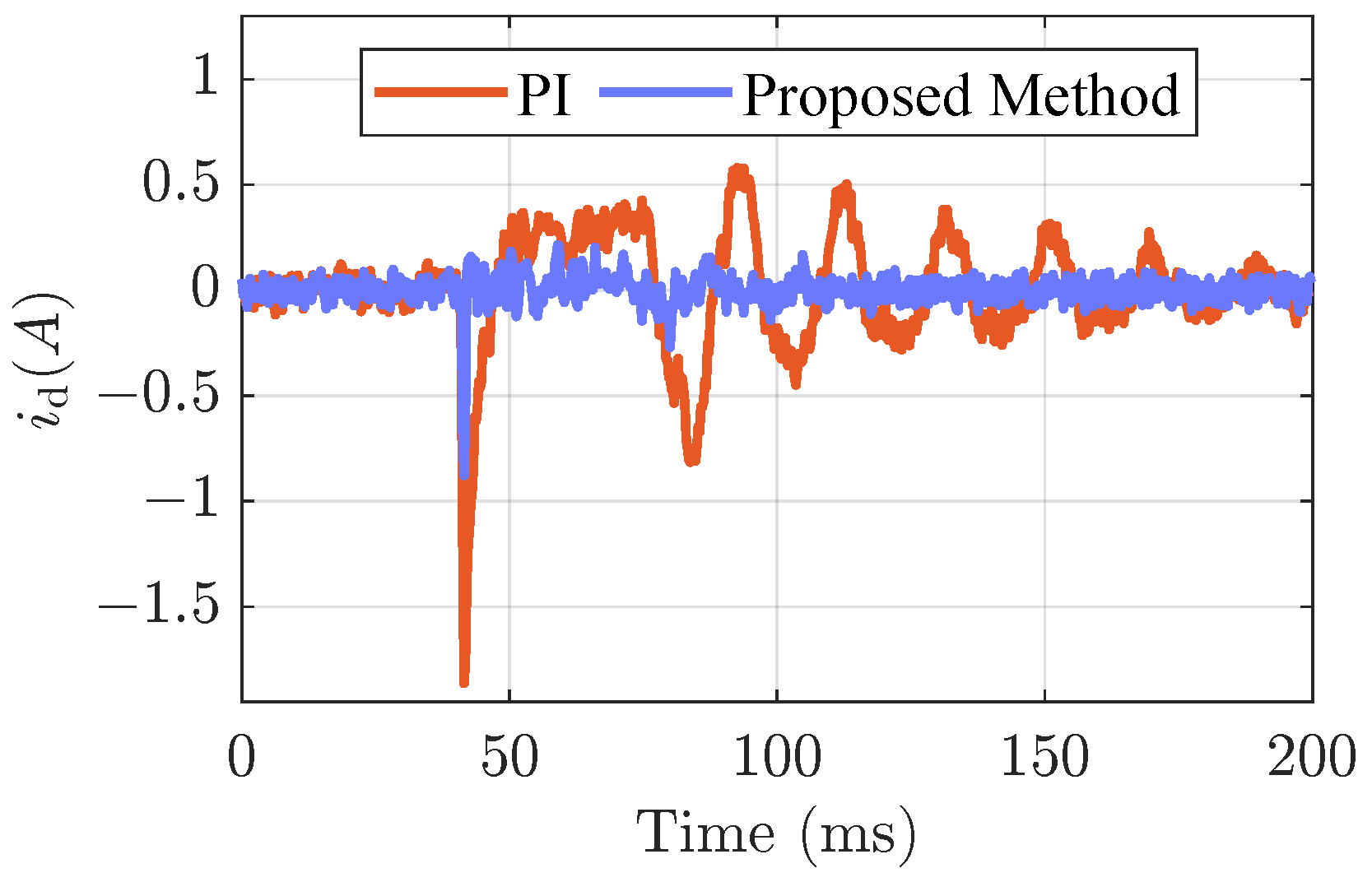
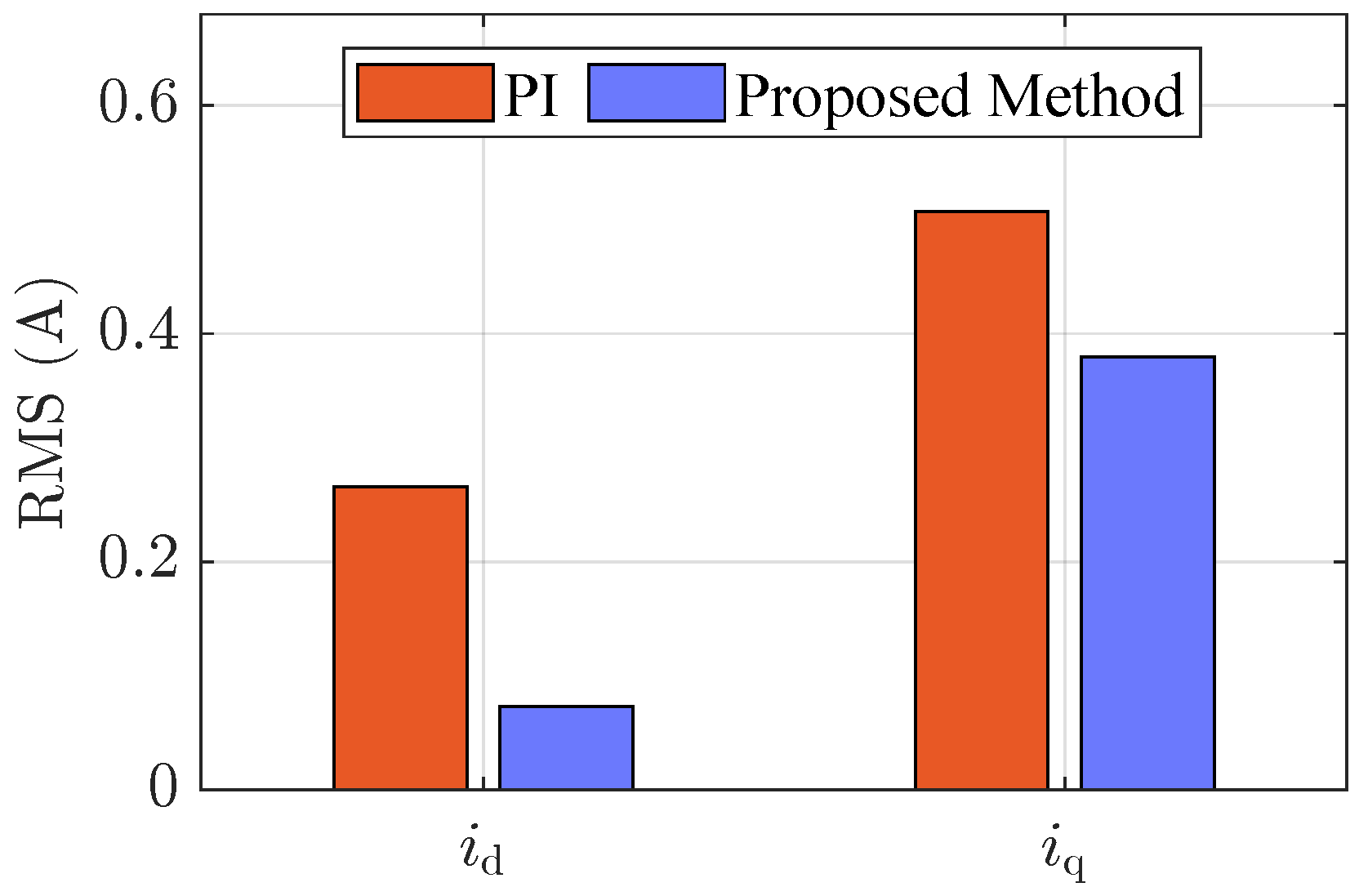
Figure 5 demonstrates the d-axis current tracking results when the speed is reversed. It is clear from the figure that the PI controller has an overshoot of −1.86 A at 40 ms, with a noticeable ripple following. The proposed method has only a current overshoot of −0.88 A, and the steady state ripple is significantly lower than that of the conventional method. Additionally, in order to evaluate the tracking performance of the currents properly, the root-mean-square (RMS) value of the tracking error is employed for the comparison. As shown in
Figure 6, the RMS values of the d-axis and q-axis current following error with the PI controller are 0.26 A and 0.51 A, respectively, while the proposed method has a following error RMS value of 0.07 A and 0.38 A, which is significantly improved over the conventional method.
5.2. Dynamic Experimental Results with Load Disturbance
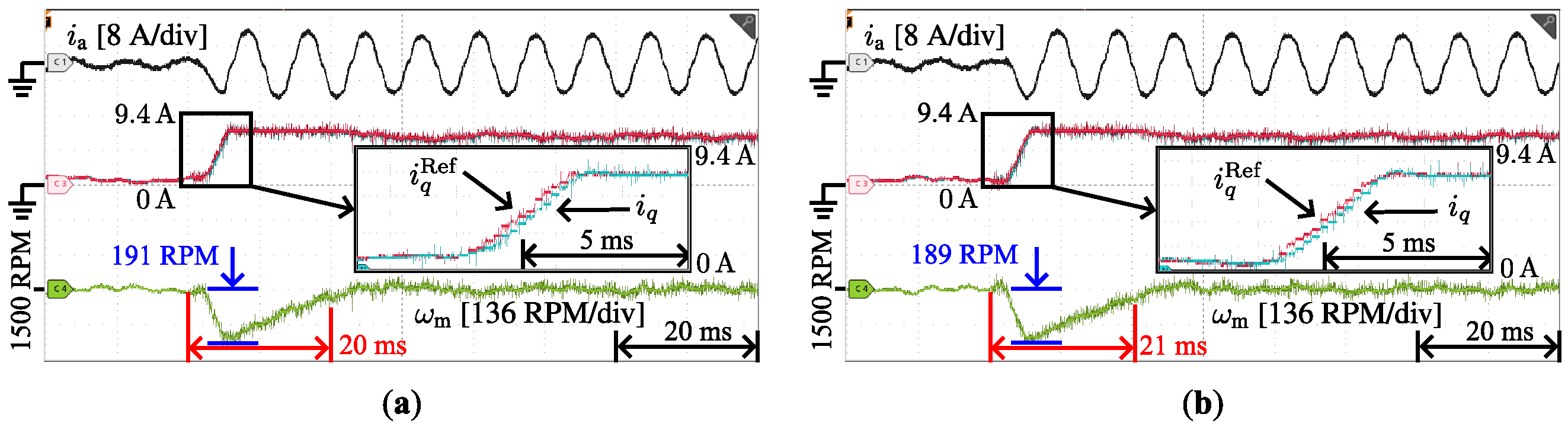
To verify the dynamic performance of the proposed method under load disturbance, the conventional and the proposed method are implemented for comparison. The test motor operates in speed loop mode, and the reference value of speed is set to 1500 RPM, while the load motor operates in current loop mode and is connected to the test motor through mechanical coupling to provide simulated load disturbance. At the time of 20 ms, the torque of the load motor is set to the rated value.
Figure 7 shows the dynamic experimental results of different controllers under load disturbance. The figure shows that the PI controller has a maximum speed drop of 191 RPM with a settling time of 20 ms under load disturbance, while the proposed method has a maximum speed drop of 189 RPM with a settling time of 21 ms, which indicates that the proposed method has similar performance to the conventional controller. However,
Figure 8 shows that for the d-axis current tracking performance, the conventional PI controller has a large current overshoot of 0.79 A. The proposed method eliminates this overshoot, and the maximum overshoot is only 0.10 A, which demonstrates that the proposed method can provide satisfactory current tracking performance, especially for the d-axis current during the load vibration.
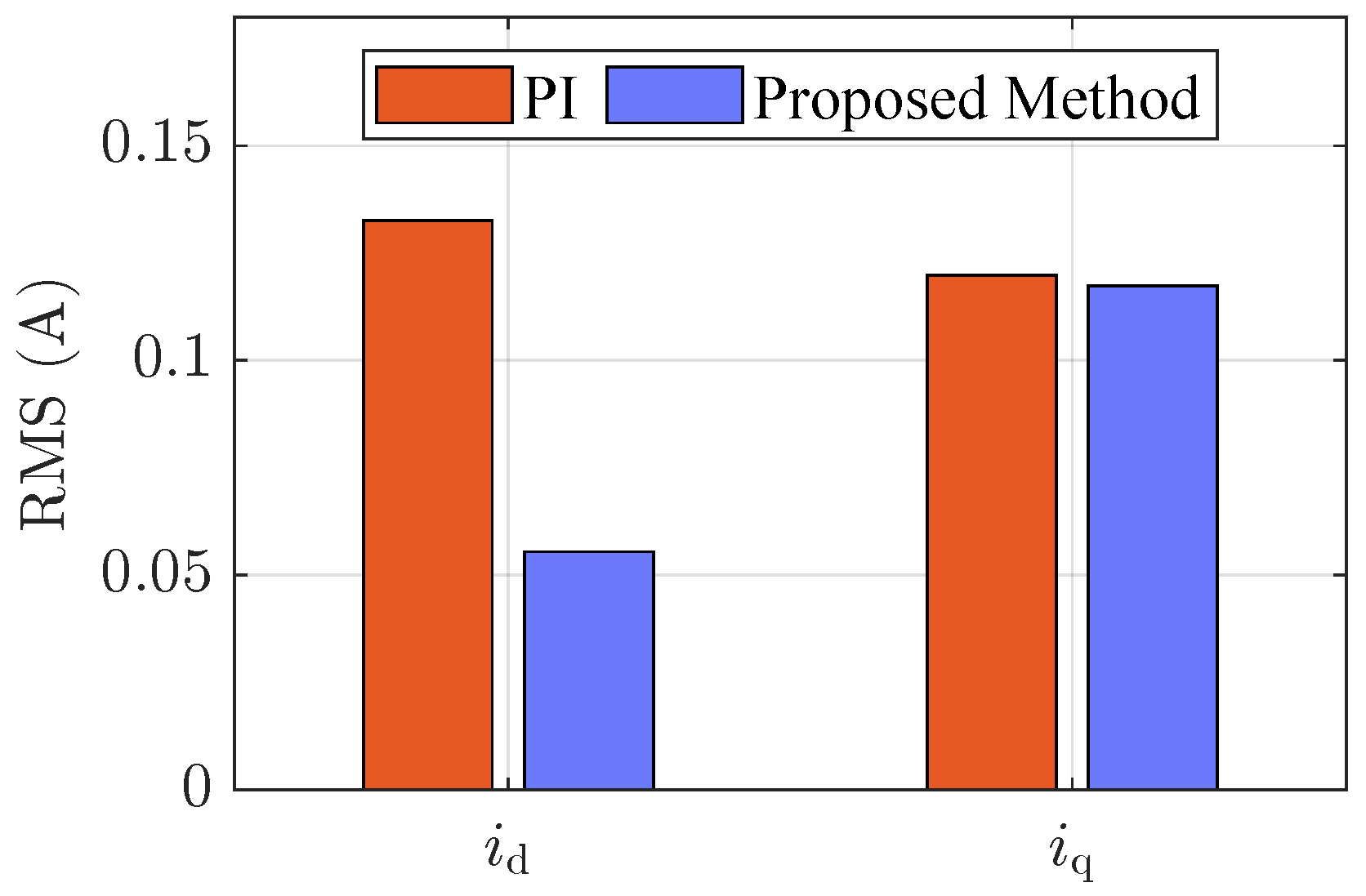
In addition, the RMS results of the d-axis and q-axis current following errors are presented in
Figure 9. For the q-axis current, the RMS of the following errors with the conventional method and the proposed method is 0.12 A and 0.12 A, respectively, which are quite similar. Nevertheless, for the following error of the d-axis current, the RMS values are 0.13 A and 0.06 A, respectively. This indicates that the proposed method provides more efficient performance for d-axis current tracking.
5.3. Experimental Results on Parameter Robustness
This set of experiments demonstrates the robust current tracking control performance of the PI controller and proposed method under different motor parameters. The test conditions are the same as in
Section 5.1, where the test motor is operated in the speed loop mode, and the speed reference is changed abruptly from −1500 rpm to 1500 RPM.
As can be seen from
Table 3, the current following error RMS values of the proposed method under nominal motor parameters are 0.07 A for
and 0.37 A for
. As the variation in the motor parameters, the following error RMS values of the d-axis currents remain at 0.06 A to 0.18 A. At the same time, the following error RMS values of the q-axis current present a minor difference with the variation in the parameters. Even the worst case, i.e., at 50% of
, is still 0.55 A, which is only a slight performance degradation compared to 0.37 A at the nominal parameter. This indicates that the proposed method has satisfactory robust current control performance for motor parameter variations.
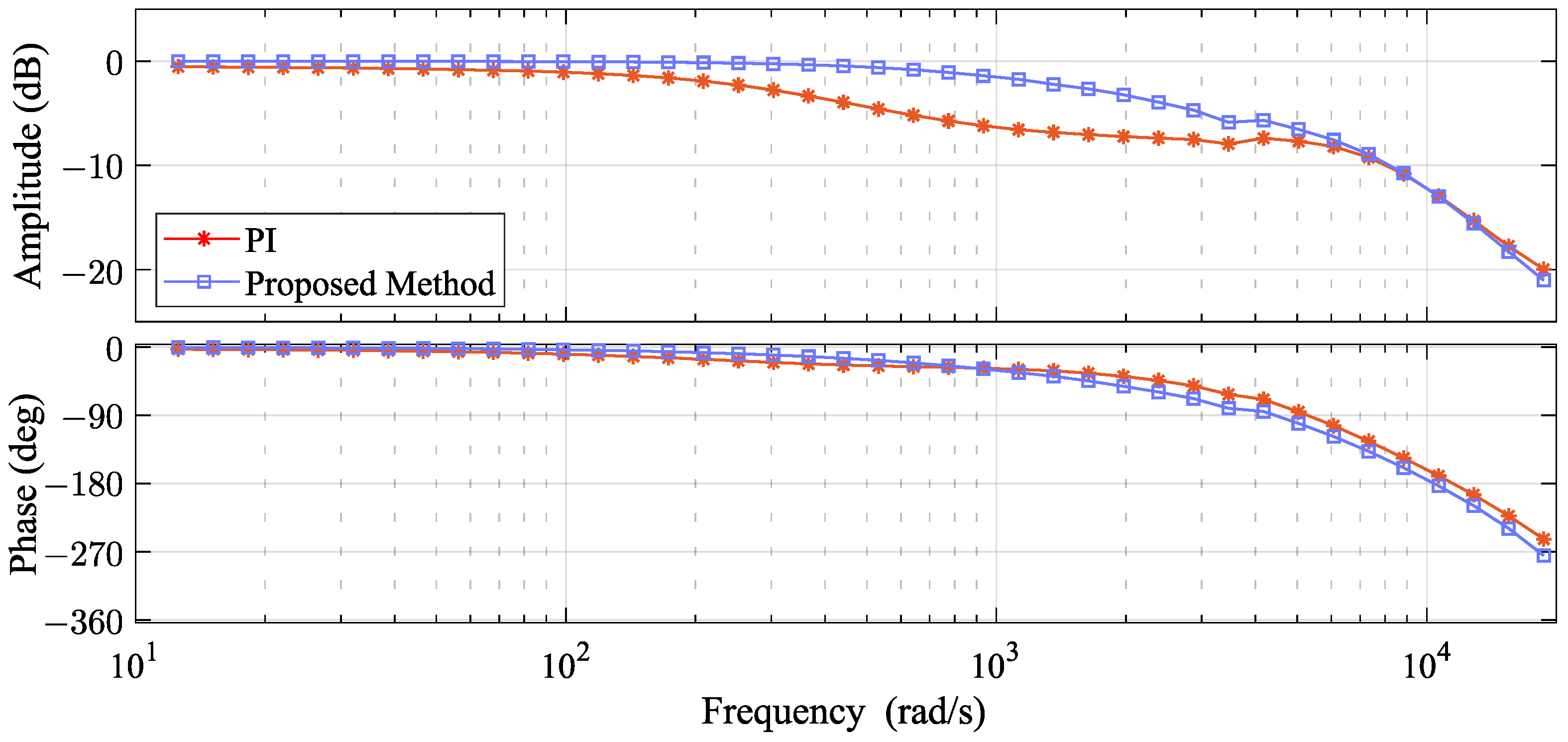
5.4. Experimental Results of Frequency Response
For further investigation into the dynamic performance of the proposed method, frequency response experiments of both PI and the proposed controller are realized. The load motor is removed from the mechanical coupling since free rotation is required for the test motor. Additionally, a sinusoidal signal with an amplitude of 1.85 A and a frequency from
to
is injected into the q-axis current of the test motor. By collecting the response results of the current and analyzing them in comparison with the injected signal, one can obtain the closed-loop frequency response plot of the system, as shown in
Figure 10. The figure shows that the closed-loop bandwidth of the conventional PI method has only
, while the proposed method increases the bandwidth to
. Therefore, the proposed method effectively increases the bandwidth of the closed-loop system and offers sufficient current tracking capability.
5.5. Experimental Results on Computational Burden
Predictive controllers are often known for having significant computational burdens; therefore, the computational time consumed by different controllers is evaluated. By toggling the output port before and after the controller operation, the running time of PI and proposed controller are measured by an oscilloscope as shown in
Figure 11. The longer the computation time, the more resources the method consumes. From the figure, it is clear that the computational time consumed by the conventional PI controller is
while the proposed method consumes
, which is not a significant increase in time. This is because the predictive controller used in the proposed method directly computes the optimal control result without iterative solving or searching for all the available voltage vectors.
Regardless of which controller is used, there is sufficient remaining time to execute other control algorithms, such as position loop or vibration suppression, compared to a control cycle of . Therefore, the proposed method provides better control performance without significant consumption of computational resources.
6. Discussion and Conclusions
In this paper, an extended state observer-based model predictive current controller is proposed for DTP-PMSM drives to improve the dynamic performance of the current loop. The mathematical model of the motor is briefly derived and discretized for predicting the current. In addition, the multi-step continuous control set predictive controller is derived and given to obtain an explicit solution for the optimal control voltage, which does not introduce a significant increase in computation time. In order to address the performance deterioration due to prediction errors, a robust observer-based MPCC method is designed for efficient observation of external disturbances, and the parameter design methodology of the observer is also presented. At each control period, external disturbances due to factors such as parameter inaccuracies or nonlinearities in the model are observed. At the same time, the observation results are compensated into the controller in real time after a step of prediction, which is applied to correct the prediction error. Therefore, the proposed method improves the dynamic performance and robustness to external disturbances effectively. Finally, multiple sets of experimental results are demonstrated to indicate the effectiveness of the proposed method.
Since the proposed method is based on a generalized motor model and the external disturbances are uniformly observed without loss of generality, it can be applied to DTP-PMSM at various power levels, including low-power applications, such as robotic arm joint motors or quadruped robots and high-power applications, such as electric vehicles, power trains, and other fields. As the external disturbances are uniformly observed in this study, future work can physically model some of the disturbances to reduce the observation requirements of the observer and further enhance the robust performance of the controller.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}