
An Efficient Path Planning Method for the Unmanned Aerial Vehicle in Highway Inspection Scenarios


Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions of This Paper
- By analyzing the highway scene inspection business, this paper summarizes the UAV flight parameter planning problem with the goal of optimizing inspection quality. The problem is limited by practical requirements such as UAV available energy and data transmission quality.
- By presenting an efficient approach, we supplement the patrol points of drones in order to improve the matching degree of UAV flight routes with highway curves.
- We propose an effective heuristic method that combines the characteristics of the business scenario to address the nonlinear and non-convex optimization problem, and the method has low operational complexity.
- Finally, we verify the performance of the proposed method and the comparative methods. The multi-dimensional simulation results indicate that the proposed method in this paper has significant advantages in terms of comprehensive planning effectiveness and operational efficiency.
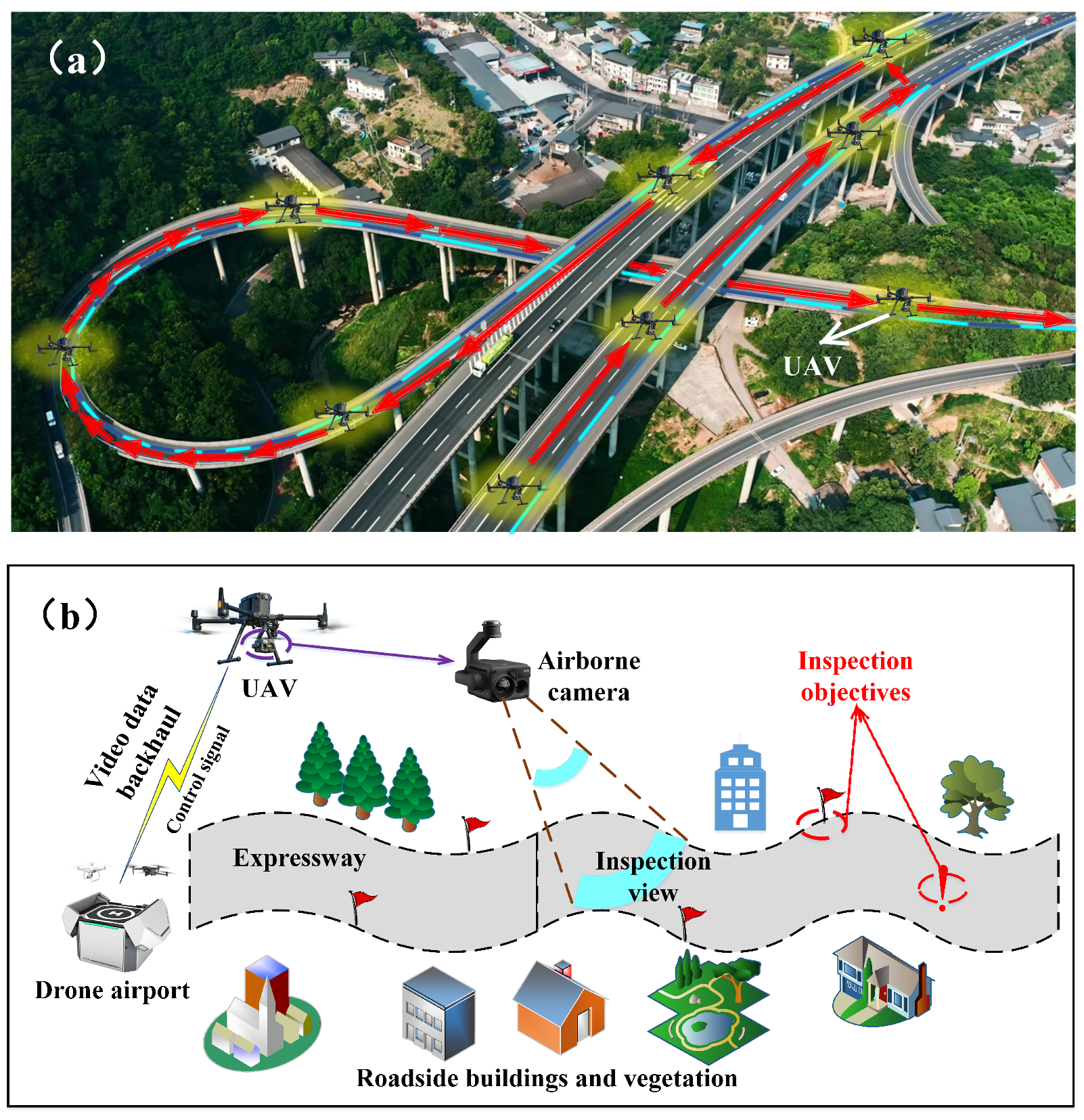
2. System Model and Problem Formulation
2.1. System Model
2.2. Problem Formulation
3. Proposed Path Planning Method
3.1. Selection of Supplementary Inspection Points
3.1.1. Data Acquisition
3.1.2. Center Point Selection
3.1.3. Side Delineation
3.1.4. Patrol Points Selection
3.2. Summary of the Proposed DIPH Method
3.2.1. Method Preliminary
3.2.2. Method Summary
| Algorithm 1: The drone inspection planning for highways (DIPH) method. |
|
3.2.3. Complexity Analysis
4. Simulation and Performance Analysis
4.1. Simulation Settings
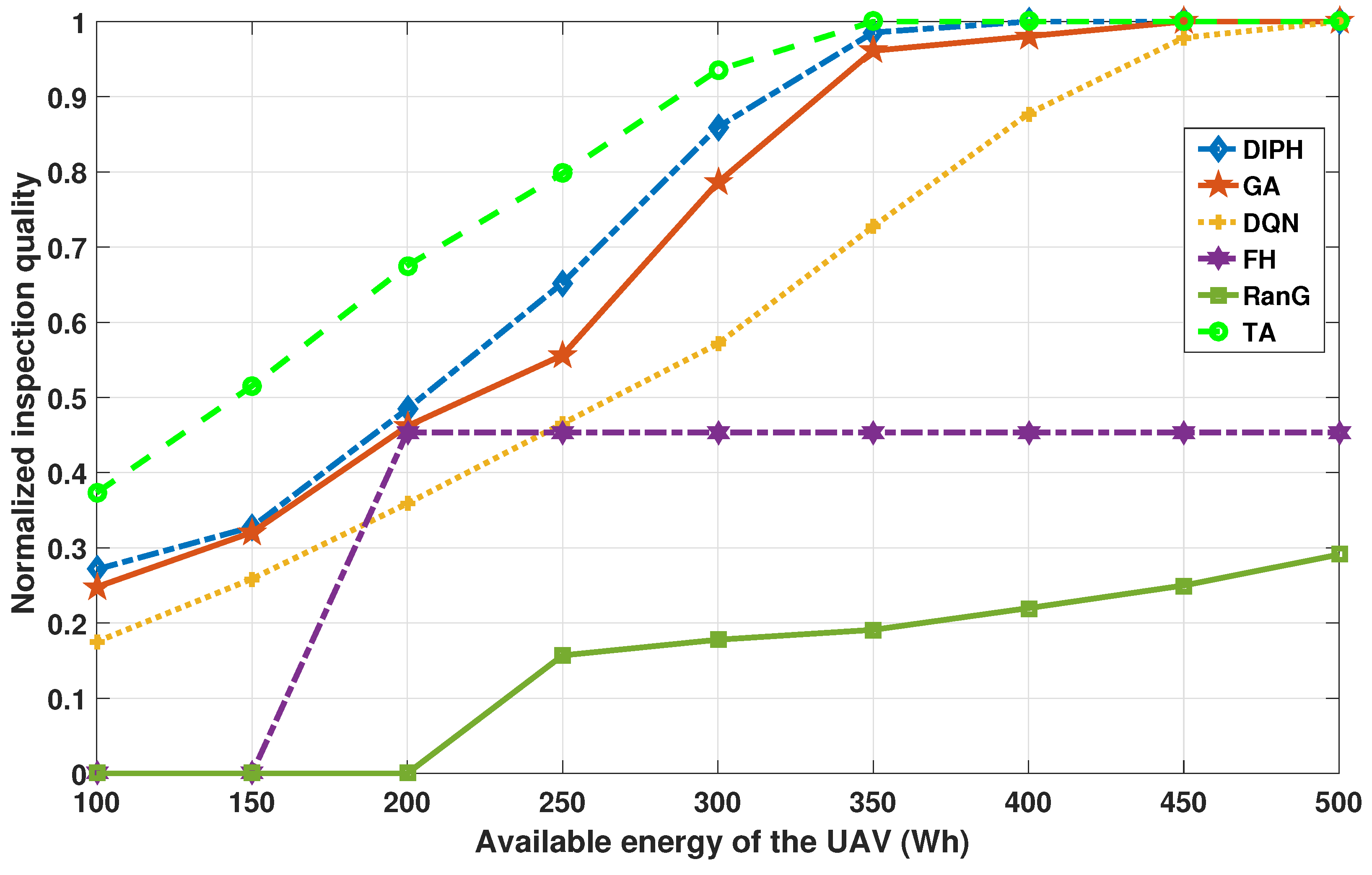
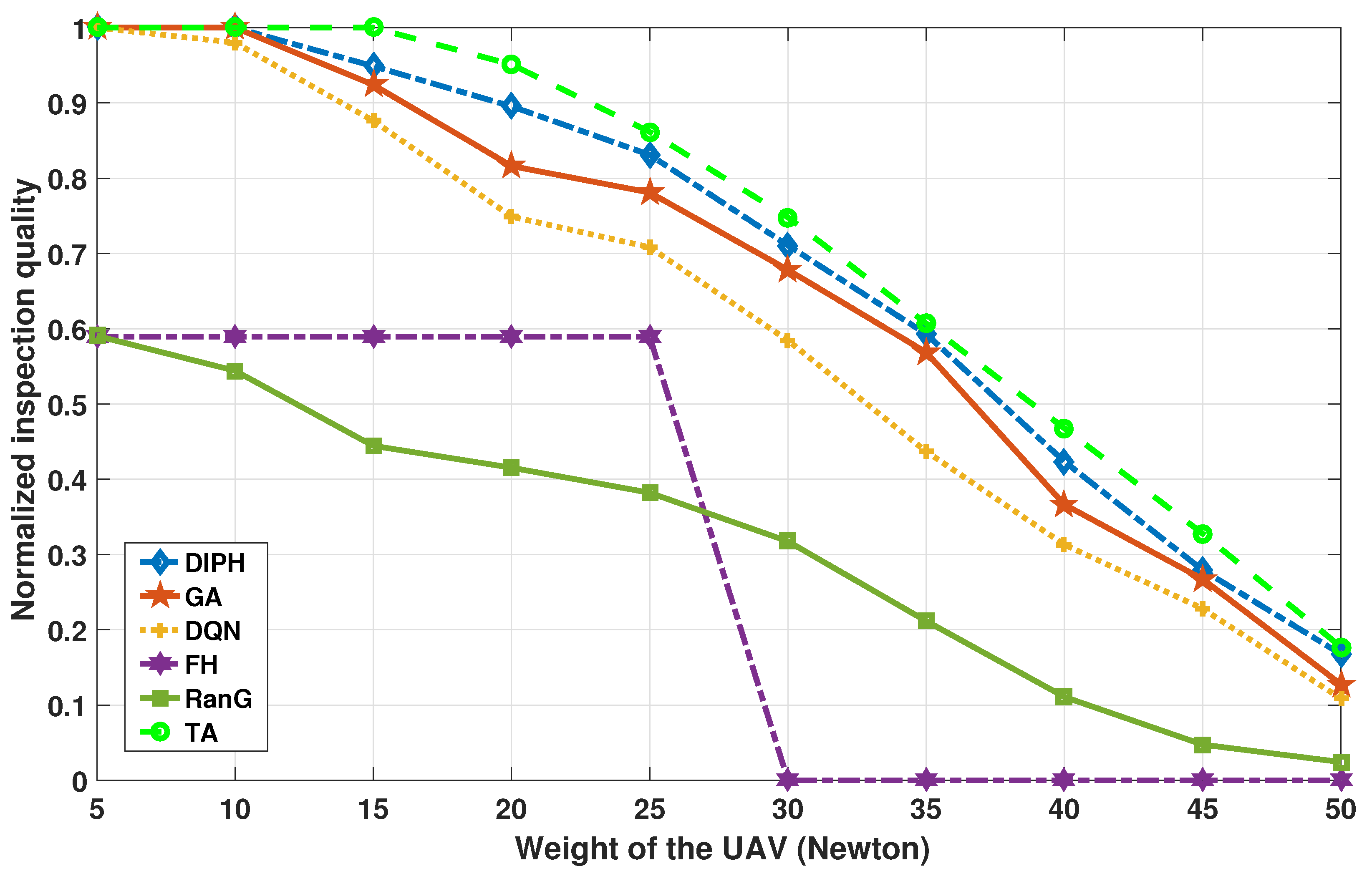
- DQN, method based on deep Q-network [25], this paper takes the parameters of the UAV and patrol points as the state inputs of the method, and takes the patrol altitude, patrol speed, and hovering altitude as the model’s actions step by step. The model is trained with the patrol quality as the reward.
- FH, the DIPH method with fixed height, on the basis of using the DIPH method to obtain the various cruising heights and hovering heights of the UAV, this method directly takes the maximum value of all heights as the cruising and hovering heights.
- RanG, method of randomly generating relevant parameters, this method randomly generates the three types of parameters for the UAV within the feasible range.
- TA, the traversal method, this method determines all possible combination solutions through traversal, and selects the solution that can achieve target (6a) as the output of the method.
4.2. Performance and Analysis
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| DRL | deep reinforcement learning |
| DQN | deep Q-Network |
| UAV | unmanned aerial vehicle |
| AI | artificial intelligence |
| LOS | line of sight |
| NLOS | non line of sight |
| DIPH | drone inspection planning for highways |
| GIS | geographic information system |
| PSO | particle swarm optimization |
| GA | genetic algorithm |
| LSTM | long short-term memory |
| CNN | convolutional neural networks |
References
- McEnroe, P.; Wang, S.; Liyanage, M. A Survey on the Convergence of Edge Computing and AI for UAVs: Opportunities and Challenges. IEEE Internet Things J. 2022, 9, 15435–15459. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned Aerial Vehicles for Search and Rescue: A Survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Mugnai, M.; Teppati Losé, M.; Herrera-Alarcón, E.P.; Baris, G.; Satler, M.; Avizzano, C.A. An Efficient Framework for Autonomous UAV Missions in Partially-Unknown GNSS-Denied Environments. Drones 2023, 7, 471. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. Energy and Delay Aware Task Assignment Mechanism for UAV-Based IoT Platform. IEEE Internet Things J. 2019, 6, 6523–6536. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, L.; Dai, J.; Hu, X.; Wei, P.; Xie, H. Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points. Drones 2023, 7, 219. [Google Scholar] [CrossRef]
- Baek, D.; Chen, Y.; Bocca, A.; Bottaccioli, L.; Di Cataldo, S.; Gatteschi, V.; Pagliari, D.J.; Patti, E.; Urgese, G.; Chang, N.; et al. Battery-Aware Operation Range Estimation for Terrestrial and Aerial Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5471–5482. [Google Scholar] [CrossRef]
- Piao, S.; Ba, Z.; Su, L.; Koutsonikolas, D.; Li, S.; Ren, K. Automating CSI Measurement with UAVs: From Problem Formulation to Energy-Optimal Solution. In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications, Paris, France, 29 April–2 May 2019; pp. 2404–2412. [Google Scholar] [CrossRef]
- Krajewski, R.; Moers, T.; Bock, J.; Vater, L.; Eckstein, L. The rounD Dataset: A Drone Dataset of Road User Trajectories at Roundabouts in Germany. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Q.; Pan, N.; Sun, Y.; An, Y.; Pan, D. UAV Stocktaking Task-Planning for Industrial Warehouses Based on the Improved Hybrid Differential Evolution Algorithm. IEEE Trans. Ind. Inform. 2022, 18, 582–591. [Google Scholar] [CrossRef]
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Gubán, M.; Udvaros, J. A Path Planning Model with a Genetic Algorithm for Stock Inventory Using a Swarm of Drones. Drones 2022, 6, 364. [Google Scholar] [CrossRef]
- Xiong, T.; Liu, F.; Liu, H.; Ge, J.; Li, H.; Ding, K.; Li, Q. Multi-Drone Optimal Mission Assignment and 3D Path Planning for Disaster Rescue. Drones 2023, 7, 394. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Cooperative Path Planning of UAVs & UGVs for a Persistent Surveillance Task in Urban Environments. IEEE Internet Things J. 2021, 8, 4906–4919. [Google Scholar] [CrossRef]
- Duan, T.; Wang, W.; Wang, T.; Huang, M.; Zhou, X. A Task Planning Method for UAV Swarm Dynamic Reconstruction Based on a Fourth-Order Motif. Electronics 2023, 12, 692. [Google Scholar] [CrossRef]
- Siemiatkowska, B.; Stecz, W. A Framework for Planning and Execution of Drone Swarm Missions in a Hostile Environment. Sensors 2021, 21, 4150. [Google Scholar] [CrossRef] [PubMed]
- Kuru, K.; Ansell, D.; Khan, W.; Yetgin, H. Analysis and Optimization of Unmanned Aerial Vehicle Swarms in Logistics: An Intelligent Delivery Platform. IEEE Access 2019, 7, 15804–15831. [Google Scholar] [CrossRef]
- Luis, C.E.; Vukosavljev, M.; Schoellig, A.P. Online Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning. IEEE Robot. Autom. Lett. 2020, 5, 604–611. [Google Scholar] [CrossRef]
- Pant, Y.V.; Abbas, H.; Quaye, R.A.; Mangharam, R. Fly-by-Logic: Control of Multi-Drone Fleets with Temporal Logic Objectives. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 186–197. [Google Scholar] [CrossRef]
- Vasquez-Gomez, J.I.; Herrera-Lozada, J.-C.; Olguin-Carbajal, M. Coverage Path Planning for Surveying Disjoint Areas. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 899–904. [Google Scholar] [CrossRef]
- Lee, M.-T.; Chuang, M.-L.; Kuo, S.-T.; Chen, Y.-R. UAV Swarm Real-Time Rerouting by Edge Computing D* Lite Algorithm. Appl. Sci. 2022, 12, 1056. [Google Scholar] [CrossRef]
- Zhu, P.; Fang, X. Multi-UAV Cooperative Task Assignment Based on Half Random Q-Learning. Symmetry 2021, 13, 2417. [Google Scholar] [CrossRef]
- Piao, C.; Liu, C.H. Energy-Efficient Mobile Crowdsensing by Unmanned Vehicles: A Sequential Deep Reinforcement Learning Approach. IEEE Internet Things J. 2020, 7, 6312–6324. [Google Scholar] [CrossRef]
- Tu, G.-T.; Juang, J.-G. UAV Path Planning and Obstacle Avoidance Based on Reinforcement Learning in 3D Environments. Actuators 2023, 12, 57. [Google Scholar] [CrossRef]
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. UAV Path Planning for Wireless Data Harvesting: A Deep Reinforcement Learning Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Maciel-Pearson, B.G.; Akçay, S.; Atapour-Abarghouei, A.; Holder, C.; Breckon, T.P. Multi-Task Regression-Based Learning for Autonomous Unmanned Aerial Vehicle Flight Control Within Unstructured Outdoor Environments. IEEE Robot. Autom. Lett. 2019, 4, 4116–4123. [Google Scholar] [CrossRef]
- Majd, A.; Ashraf, A.; Troubitsyna, E.; Daneshtalab, M. Integrating Learning, Optimization, and Prediction for Efficient Navigation of Swarms of Drones. In Proceedings of the 2018 26th Euromicro International Conference on Parallel, Distributed and Network-based Processing (PDP), Cambridge, UK, 21–23 March 2018; pp. 101–108. [Google Scholar] [CrossRef]
- Loquercio, A.; Maqueda, A.I.; del-Blanco, C.R.; Scaramuzza, D. DroNet: Learning to Fly by Driving. IEEE Robot. Autom. Lett. 2018, 3, 1088–1095. [Google Scholar] [CrossRef]
- Liu, C.H.; Ma, X.; Gao, X.; Tang, J. Distributed Energy-Efficient Multi-UAV Navigation for Long-Term Communication Coverage by Deep Reinforcement Learning. IEEE Trans. Mob. Comput. 2020, 19, 1274–1285. [Google Scholar] [CrossRef]
- Benkhoui, Y.; Korchi, T.E.; Reinhold, L. UAS-Based Crack Detection Using Stereo Cameras: A Comparative Study. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1031–1035. [Google Scholar] [CrossRef]
- Yang, L.; Li, B.; Li, W.; Brand, H.; Jiang, B.; Xiao, J. Concrete defects inspection and 3D mapping using CityFlyer quadrotor robot. IEEE/CAA J. Autom. Sin. 2020, 7, 991–1002. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication With Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Q.; Zeng, Y.; Zhang, R. Energy Tradeoff in Ground-to-UAV Communication via Trajectory Design. IEEE Trans. Veh. Technol. 2018, 67, 6721–6726. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The width and length of the highway | 30 m, 5 km |
| Number of patrol points | 20∼200 |
| Transmit power of the signal | 20 dBm (i.e., 100 mW) |
| The fuselage drag ratio | 0.6 |
| The average rotor speed | 1.44∼7.19 |
| The speed of the rotor blades | 48 m/s |
| Profile drag coefficient | 0.012 |
| Air density , Rotor solidity s | 1.225 kg/m, 0.05 |
| Rotor disc area A, Rotor radius R | 0.79 m, 0.12 m |
| Blade angular velocity | 400 rads/s |
| Incremental correction factor to induced power | 0.1 |
| Weight of UAV W | 5∼50 Newton |
| Available energy of UAV E | 100∼500 Wh |
| , Noise power | −160 dBm/Hz, −174 dBm/Hz |
| , , | 1 m/s, 1.2, 0.8 |
| a, b, | 0.5, 1.2, 25 mm, 105 mm |
| , , | 20 m, 1000 m, 30 m/s |
| 0∼30 s | |
| 1∼100 |
| Method | Average Execution Time |
|---|---|
| DIPH | 15.7 ms |
| GA | 2168.2 ms |
| DQN | 3.6 ms (Average training time: 52,815.1 ms) |
| FH | 10.5 ms |
| RanG | 1.2 ms |
| TA | 89,436.7 ms |
| Performance Category | Performance Sorting |
|---|---|
| Inspection quality vs. Number of inspection points | TA > DIPH > GA > DQN > FH > RanG |
| Inspection quality vs. Available energy of the UAV | TA > DIPH > GA > DQN > FH > RanG |
| Inspection quality vs. Weight of the UAV | TA > DIPH > GA > DQN > FH ≈ RanG |
| Operational efficiency | RanG > FH > DIPH ≫ GA ≫ TA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Gao, S.; Liu, X.; Zuo, P.; Li, H. An Efficient Path Planning Method for the Unmanned Aerial Vehicle in Highway Inspection Scenarios. Electronics 2023, 12, 4200. https://doi.org/10.3390/electronics12204200
Li Y, Gao S, Liu X, Zuo P, Li H. An Efficient Path Planning Method for the Unmanned Aerial Vehicle in Highway Inspection Scenarios. Electronics. 2023; 12(20):4200. https://doi.org/10.3390/electronics12204200
Chicago/Turabian StyleLi, Yuanlong, Shang Gao, Xuewen Liu, Peiliang Zuo, and Haoliang Li. 2023. "An Efficient Path Planning Method for the Unmanned Aerial Vehicle in Highway Inspection Scenarios" Electronics 12, no. 20: 4200. https://doi.org/10.3390/electronics12204200
APA StyleLi, Y., Gao, S., Liu, X., Zuo, P., & Li, H. (2023). An Efficient Path Planning Method for the Unmanned Aerial Vehicle in Highway Inspection Scenarios. Electronics, 12(20), 4200. https://doi.org/10.3390/electronics12204200